一种轮胎拆装协作机器人的制作方法
1.本实用新型涉及拆胎机构,具体是一种轮胎拆装协作机器人。
背景技术:
2.常规的大型车轮胎拆装是通过人工使用气动螺栓枪将车辆上的螺栓进行拆除,从而实现轮胎的更换;或通过人工使用气动螺栓枪将螺栓安装进螺栓孔内,实现轮胎的安装;由于大型车轮胎上的螺栓数量多,通过人工的方式耗时耗力,且效率低下,有安全隐患;
3.综上,如何实现大型车轮胎的自动化拆装成为了本公司研究人员急需解决的问题
技术实现要素:
4.本实用新型要解决的技术问题是:如何实现公交车轮胎的自动化拆装;
5.为解决上述技术问题,本实用新型采用如下技术方案:
6.本实用新型是一种轮胎拆装协作机器人,包括:定位组件,其包括圆周布置的多个套筒连接轴;当定位组件绕其轴向方向自转,将套筒连接轴对应相应轮胎螺栓后,通过平移组件将套筒连接轴头部与轮胎螺栓配合,或将轮胎螺栓安装在所述套筒连接轴上,将所述定位组件水平旋转对准轮胎上的螺栓孔;驱动组件,其适于插入至少一个套筒连接轴尾部,并驱动套筒连接轴同步转动;抱臂组件,其适于旋转后抱紧轮胎,限制轮胎转动;底座,其适于将定位组件处于收纳状态,或将轮胎的圆心与定位组件的圆心处于水平同轴状态;
7.在本方案中,当需要拆卸轮胎时,通过底座的运动,将定位组件中心与轮胎的中心处于同一水平线上,抱臂组件抱紧轮胎,从而限制轮胎的转动;定位组件可发生旋转,将套筒连接轴一一对应相应螺栓后,通过平移组件将套筒连接轴与螺栓一一配合进行定位;驱动组件可与套筒连接轴尾部配合,从而驱动套筒连接轴转动,将螺栓从轮胎上进行拆卸;
8.当轮胎需要安装时,将轮胎夹紧在抱臂组件上,通过底座的运动,将轮胎的轴线与轮胎转轴的轴线处于共线状态,轮胎螺栓安装在套筒连接轴上,将定位组件水平旋转对准轮胎上的螺栓孔,通过平移组件将轮胎螺栓装进螺栓孔内,通过驱动组件的转动,将螺栓旋进螺栓孔内。
9.为了说明底座的具体结构,本实用新型采用底座包括:水平旋转机构,其由第一动力机构控制,驱动其输出端水平旋转;第一竖直旋转机构,其与水平旋转机构的输出端连接,并由第二动力机构控制,驱动其输出端竖直摆动;第二竖直旋转机构,其与第一竖直旋转机构的输出端连接,并由第三动力机构控制,驱动输出端竖直摆动;
10.通过底座实现三种运动,水平旋转机构对应的是水平面上的转动;第一竖直旋转机构、第二竖直旋转机构对应的是竖直面上的转动;分别由第一、二、三动力机构对应控制;
11.水平旋转机能够将整体的拆胎机构正面或者侧面朝向轮胎;第一竖直旋转机构、第二竖直旋转机构能够将定位组件对准轮胎的中心,也就是说,第一竖直旋转机构、第二竖直旋转机构在竖直面上能够实现两轴的运动。
12.为了说明平移组件的具体结构,本实用新型采用平移组件包括:尾端壳体;直线模
组,其由第四动力机构控制,驱动尾端壳体相对于底座的直线运动;
13.尾端壳体与定位组件连接,尾端壳体的运动直线运动从而实现定位组件的直线运动;直线模组与底座连接,具体说,直线模组与第三动力机构控制的输出端平面连接。
14.为了说明直线模组的具体结构,本实用新型采用直线模组包括:滑轨,其对称设置在尾端壳体底部;滑轮组,其对称转动设置在底座顶面,并作用于滑轨两侧;支板,其竖直设置在底座顶面,并穿过尾端壳体;滑轮,其转动设置在支板端部,并作用于滑轨上端面;主动轮,其与第四动力机构输出端连接,并作用于其中一滑轨内侧面;
15.滑轮组夹紧滑轨两侧,支板竖直设置,并与滑轮配合,限制尾端壳体在运动过程中发生翘起现象,始终保持尾端壳体处于水平运动状态,第四动力机构作为动力源,驱动滑轨的移动,从而实现尾端壳体相对于底座的运动。
16.为了说明定位组件的具体结构,本实用新型采用定位组件包括:前端壳体,其由第五动力机构控制转动;第一安装板,其固定设置在前端壳体内;多个套筒连接轴,其呈圆周设置在第一安装板上;
17.前端壳体的转动由第五动力机构控制实现转动,从而带动第一安装板上的多个套筒连接轴旋转后对准轮胎螺栓,在上述平移组件的带动下,将套筒连接轴与螺栓实现插接配合。
18.为了说明第五动力机构是如何控制前端壳体的转动,本实用新型采用前端壳体后端穿过轴承并固定有第一齿圈;轴承的外圈与前端壳体固定连接,轴承的内圈连接有底板;底板上安装有第五动力机构;第五动力机构的输出端穿过底板,并与第一齿圈的内圈啮合;
19.前端壳体的端部固定有第一齿圈,且穿过轴承,轴承的内圈与底板固定连接,轴承外圈与前端壳体固定连接,底板上设置有与第一齿圈啮合的第五动力机构,第五动力机构转动,将动力依次传递给第一齿圈、前端壳体,实现前端壳体的转动;为了进一步实现转动的稳定性,前端壳体还与轴承外圈连接,也就是说,第五动力机构转动,轴承的外圈也发生转动。
20.为了说明驱动组件的具体结构,本实用新型采用驱动组件包括:第二安装板,其由第六动力机构驱动转动;转动轴,其由第七动力机构控制驱动自转;当第六动力机构驱动第二安装板转动,将转动轴与套筒连接轴处于同一直线上时,切换气缸驱动第二安装板前行,并将转动轴的头部与套筒连接轴尾部配合,第七动力机构控制转动轴转动,并带动套筒连接轴转动;
21.驱动组件由三种运动方式,分别是:1、第六动力机构驱动第二安装板的转动;2、第七动力机构驱动转动轴的转动;3、切换气缸实现第二安装的前后运动。
22.为了说明第六动力机构如何驱动第二安装板的转动,本实用新型采用第二安装板具有一输入轴;输入轴上套定有第二齿圈;底板,其上安装有第六动力机构;第六动力机构的输出端与第二齿圈啮合,并驱动第二齿圈转动;
23.底板为上述定位组件提及的底板,第六动力机构输出的转动力依次传递给第二齿圈,输入轴,从而实现第二安装板的转动。
24.为了说明第七动力机构如何驱动转动轴的转动,本实用新型采用输入轴上活动套设有第三齿圈;转动轴上套定有第四齿圈;底板上安装有第七动力机构,第七动力机构将转动力依次传递给第三齿圈、第四齿圈,并驱动输入轴转动;
25.第三齿圈内外均设置有齿,第七动力机构同样固定在底板上,第七动力机构的输出轴与第三齿圈的内圈啮合,驱动第三齿圈外圈转动,通过转动副将动力传递给第四齿圈,第四齿圈与转动轴固定连接,从而实现第七动力机构控制转动轴的转动。
26.为了说明切换气缸如何实现第二安装板的前进或者后退,本实用新型采用底板上设置有切换气缸;切换气缸的伸出端与输入轴端部固定连接,并驱动第二安装板前进或后退,将转动轴与套筒连接轴连接或脱离;
27.切换气缸同样固定在底板中心位置,底板的伸出端与输入轴固定连接,实现第二安装板的前后运动。
28.为了说明抱臂组件的具体结构,本实用新型采用抱臂组件包括:
29.弧形抱臂,其一端与固定板转动连接;固定板呈圆周等分设置在底板周向上;主动臂,其一端与弧形抱臂固定连接,另一端与轴承外圈固定连接;第五齿圈,其与轴承外圈固定连接;第八动力机构,其固定在底板上,并将其输出端与第五齿圈内圈啮合,驱动轴承外圈相对于底板的转动;
30.由于底板始终保持不旋转状态,弧形抱臂通过固定板与底板连接,固定板与弧形抱臂连接处为旋转中心,主动臂一端与弧形抱臂连接,另一端与轴承的外圈连接,轴承的外圈上固定有第五齿圈,第五齿圈与底板上第八动力机构输出端啮合,从而实现轴承外圈转动,主动臂作用于弧形抱臂,将弧形抱臂报紧轮胎,限制轮胎的转动。
31.在本方案中,第一动力机构至第八动力机构可采用电机或者气缸或液压作为动力来源。
32.本实用新型的有益效果:本实用新型是一种轮胎拆装协作机器人,当需要拆卸轮胎时,通过底座的运动,将定位组件中心与轮胎的中心处于同一水平线上,抱臂组件抱紧轮胎,从而限制轮胎的转动;定位组件可发生旋转,将套筒连接轴一一对应相应螺栓后,通过平移组件将套筒连接轴与螺栓一一配合进行定位;驱动组件可与套筒连接轴尾部配合,从而驱动套筒连接轴转动,将螺栓从轮胎上进行拆卸;当轮胎需要安装时,将轮胎夹紧在抱臂组件上,通过底座的运动,将轮胎的轴线与轮胎转轴的轴线处于共线状态,轮胎螺栓安装在套筒连接轴上,将定位组件水平旋转对准轮胎上的螺栓孔,通过平移组件将轮胎螺栓装进螺栓孔内,通过驱动组件的转动,将螺栓旋进螺栓孔内;实现了轮胎的自动化拆装。
附图说明
33.下面结合附图和实施例对本实用新型进一步说明。
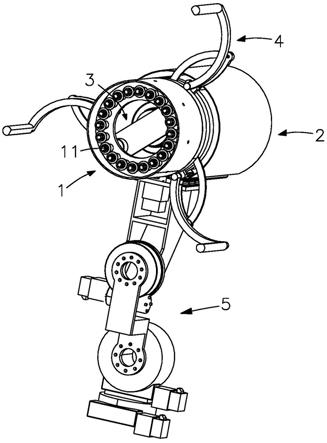
34.图1是本实用新型的结构示意图;
35.图2是本实用新型底座结构示意图;
36.图3是本实用新型定位组件结构示意图;
37.图4是本实用新型前端壳体转动原理图;
38.图5是本实用新型定位组件另一视角结构示意图;
39.图6是本实用新型驱动组件结构示意图;
40.图7是本实用新型驱动组件另一视角结构示意图;
41.图8是本实用新型第三齿圈结构示意图;
42.图9是本实用新型抱臂组件结构示意图;
43.图10是本实用新型抱臂组件另一视角结构示意图;
44.图中:1
‑
定位组件、11
‑
套筒连接轴、12
‑
前端壳体、13
‑
第五动力机构、14
‑
第一安装板、15
‑
轴承、16
‑
第一齿圈、17
‑
底板、2
‑
平移组件、21
‑
尾端壳体、22
‑
直线模组、23
‑
第四动力机构、221
‑
滑轨、222
‑
滑轮组、223
‑
支板、224
‑
滑轮、3
‑
驱动组件、31
‑
第二安装板、32
‑
第六动力机构、33
‑
转动轴、34
‑
第七动力机构、35
‑
切换气缸、36
‑
输入轴、37
‑
第二齿圈、38
‑
第三齿圈、39
‑
第四齿圈、4
‑
抱臂组件、41
‑
弧形抱臂、42
‑
固定板、43
‑
主动臂、44
‑
第五齿圈、45
‑
第八动力机构、5
‑
底座、51
‑
水平旋转机构、52
‑
第一动力机构、53
‑
第一竖直旋转机构、54
‑
第二动力机构、55
‑
第二竖直旋转机构、56
‑
第三动力机构。
具体实施方式
45.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
46.如图1所示,本实用新型是一种轮胎拆装协作机器人,包括:定位组件1,其包括圆周布置的多个套筒连接轴11;当定位组件1绕其轴向方向自转,将套筒连接轴11对应相应轮胎螺栓后,通过平移组件2将套筒连接轴11头部与轮胎螺栓配合;驱动组件3,其适于插入至少一个套筒连接轴11尾部,并驱动套筒连接轴同步转动;抱臂组件4,其适于旋转后抱紧轮胎,限制轮胎转动;底座5,其适于将定位组件1处于收纳状态,或将轮胎的圆心与定位组件1的圆心处于水平同轴状态;
47.在本方案中,当需要拆卸轮胎时,通过底座的运动,将定位组件中心与轮胎的中心处于同一水平线上,抱臂组件抱紧轮胎,从而限制轮胎的转动;定位组件可发生旋转,将套筒连接轴一一对应相应螺栓后,通过平移组件将套筒连接轴与螺栓一一配合进行定位;驱动组件可与套筒连接轴尾部配合,从而驱动套筒连接轴转动,将螺栓从轮胎上进行拆卸;
48.当轮胎需要安装时,将轮胎夹紧在抱臂组件上,通过底座的运动,将轮胎的轴线与轮胎转轴的轴线处于共线状态,轮胎螺栓安装在套筒连接轴上,将定位组件水平旋转对准轮胎上的螺栓孔,通过平移组件将轮胎螺栓装进螺栓孔内,通过驱动组件的转动,将螺栓旋进螺栓孔内。
49.如图2所示,为了说明底座的具体结构,本实用新型采用底座5包括:水平旋转机构51,其由第一动力机构52控制,驱动其输出端水平旋转;第一竖直旋转机构53,其与水平旋转机构51的输出端连接,并由第二动力机构54控制,驱动其输出端竖直摆动;第二竖直旋转机构55,其与第一竖直旋转机构53的输出端连接,并由第三动力机构56控制,驱动输出端竖直摆动;
50.通过底座实现三种运动,水平旋转机构对应的是水平面上的转动;第一竖直旋转机构、第二竖直旋转机构对应的是竖直面上的转动;分别由第一、二、三动力机构对应控制;
51.水平旋转机能够将整体的拆胎机构正面或者侧面朝向轮胎;第一竖直旋转机构、第二竖直旋转机构能够将定位组件对准轮胎的中心,也就是说,第一竖直旋转机构、第二竖直旋转机构在竖直面上能够实现两轴的运动。
52.如图2所示,为了说明平移组件的具体结构,本实用新型采用平移组件2包括:尾端壳体21;直线模组22,其由第四动力机构23控制,驱动尾端壳体21相对于底座5的直线运动;
53.尾端壳体与定位组件连接,尾端壳体的运动直线运动从而实现定位组件的直线运
动;直线模组与底座连接,具体说,直线模组与第三动力机构控制的输出端平面连接。
54.如图2所示,为了说明直线模组的具体结构,本实用新型采用直线模组22包括:滑轨221,其对称设置在尾端壳体21底部;滑轮组222,其对称转动设置在底座5顶面,并作用于滑轨222两侧;支板223,其竖直设置在底座5顶面,并穿过尾端壳体21;滑轮224,其转动设置在支板223端部,并作用于滑轨221上端面;主动轮,其与第四动力机构23输出端连接,并作用于其中一滑轨221内侧面;
55.滑轮组夹紧滑轨两侧,支板竖直设置,并与滑轮配合,限制尾端壳体在运动过程中发生翘起现象,始终保持尾端壳体处于水平运动状态,第四动力机构作为动力源,驱动滑轨的移动,从而实现尾端壳体相对于底座的运动。
56.如图3所示,为了说明定位组件的具体结构,本实用新型采用定位组件1包括:前端壳体12,其由第五动力机构13控制转动;第一安装板14,其固定设置在前端壳体13内;多个套筒连接轴11,其呈圆周设置在第一安装板14上;
57.前端壳体的转动由第五动力机构控制实现转动,从而带动第一安装板上的多个套筒连接轴旋转后对准轮胎螺栓,在上述平移组件的带动下,将套筒连接轴与螺栓实现插接配合。
58.如图3、4、5所示,为了说明第五动力机构是如何控制前端壳体的转动,本实用新型采用前端壳体12后端穿过轴承15并固定有第一齿圈16;轴承15的外圈与前端壳体12定连接,轴承15的内圈连接有底板17;底板17上安装有第五动力机构13;第五动力机构13的输出端穿过底板17,并与第一齿圈16的内圈啮合;
59.前端壳体的端部固定有第一齿圈,且穿过轴承,轴承的内圈与底板固定连接,轴承外圈与前端壳体固定连接,底板上设置有与第一齿圈啮合的第五动力机构,第五动力机构转动,将动力依次传递给第一齿圈、前端壳体,实现前端壳体的转动;为了进一步实现转动的稳定性,前端壳体还与轴承外圈连接,也就是说,第五动力机构转动,轴承的外圈也发生转动。
60.如图6、7、8所示,为了说明驱动组件的具体结构,本实用新型采用驱动组件3包括:第二安装板31,其由第六动力机构32驱动转动;转动轴33,其由第七动力机构34控制驱动自转;当第六动力机构32驱动第二安装板转动,将转动轴33与套筒连接轴11处于同一直线上时,切换气缸35驱动第二安装板31前行,并将转动轴33的头部与套筒连接轴11尾部配合,第七动力机构34控制转动轴转动,并带动套筒连接轴11转动;
61.驱动组件由三种运动方式,分别是:1、第六动力机构驱动第二安装板的转动;2、第七动力机构驱动转动轴的转动;3、切换气缸实现第二安装的前后运动。
62.如图6、7、8所示,为了说明第六动力机构如何驱动第二安装板的转动,本实用新型采用第二安装板31具有一输入轴36;输入轴36上套定有第二齿圈37;底板17,其上安装有第六动力机构32;第六动力机构32的输出端与第二齿圈37啮合,并驱动第二齿圈37转动;
63.底板为上述定位组件提及的底板,第六动力机构输出的转动力依次传递给第二齿圈,输入轴,从而实现第二安装板的转动。
64.如图6、7、8所示,为了说明第七动力机构如何驱动转动轴的转动,本实用新型采用输入轴36上活动套设有第三齿圈38;转动轴36上套定有第四齿圈39;底板17上安装有第七动力机构34,第七动力机构34将转动力依次传递给第三齿圈38、第四齿圈39,并驱动输入轴
36转动;
65.第三齿圈内外均设置有齿,第七动力机构同样固定在底板上,第七动力机构的输出轴与第三齿圈的内圈啮合,驱动第三齿圈外圈转动,通过转动副将动力传递给第四齿圈,第四齿圈与转动轴固定连接,从而实现第七动力机构控制转动轴的转动。
66.如图6、7、8所示,为了说明切换气缸如何实现第二安装板的前进或者后退,本实用新型采用底板17上设置有切换气缸35;切换气缸35的伸出端与输入轴36端部固定连接,并驱动第二安装板31前进或后退,将转动轴33与套筒连接轴11连接或脱离;
67.切换气缸同样固定在底板中心位置,底板的伸出端与输入轴固定连接,实现第二安装板的前后运动。
68.如图9、10所示,为了说明抱臂组件的具体结构,本实用新型采用抱臂组件4包括:弧形抱臂41,其一端与固定板42转动连接;固定板42呈圆周等分设置在底板17周向上;主动臂43,其一端与弧形抱臂41固定连接,另一端与轴承15外圈固定连接;第五齿圈44,其与轴承15外圈固定连接;第八动力机构45,其固定在底板17上,并将其输出端与第五齿圈44内圈啮合,驱动轴承15外圈相对于底板17的转动;
69.由于底板始终保持不旋转状态,弧形抱臂通过固定板与底板连接,固定板与弧形抱臂连接处为旋转中心,主动臂一端与弧形抱臂连接,另一端与轴承的外圈连接,轴承的外圈上固定有第五齿圈,第五齿圈与底板上第八动力机构输出端啮合,从而实现轴承外圈转动,主动臂作用于弧形抱臂,将弧形抱臂报紧轮胎,限制轮胎的转动。
70.本实用新型是一种轮胎拆装协作机器人,当需要拆卸轮胎时,通过底座的运动,将定位组件中心与轮胎的中心处于同一水平线上,抱臂组件抱紧轮胎,从而限制轮胎的转动;定位组件可发生旋转,将套筒连接轴一一对应相应螺栓后,通过平移组件将套筒连接轴与螺栓一一配合进行定位;驱动组件可与套筒连接轴尾部配合,从而驱动套筒连接轴转动,将螺栓从轮胎上进行拆卸;当轮胎需要安装时,将轮胎夹紧在抱臂组件上,通过底座的运动,将轮胎的轴线与轮胎转轴的轴线处于共线状态,轮胎螺栓安装在套筒连接轴上,将定位组件水平旋转对准轮胎上的螺栓孔,通过平移组件将轮胎螺栓装进螺栓孔内,通过驱动组件的转动,将螺栓旋进螺栓孔内;实现了轮胎的自动化拆装。
71.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1