四轮电动车座椅自动平衡控制系统的制作方法
1.本实用新型涉及电动车控制技术领域,尤其是涉及一种四轮电动车座椅自动平衡控制系统。
背景技术:
2.随着能源价格的高涨及温室气体对环境的危害凸显,也随着城市交通越来越拥堵,电动车因其方便便捷和节能环保越来越受到欢迎,现有四轮电动车通过控制电动车座椅的平衡来达到乘坐的舒适性和安全性。普通的四轮电动车在转弯时由于离心力的作用使4轮电动车容易发生侧倾甚至翻车,至此未能找到可靠的稳定控制系统。
3.公开于该背景技术部分的信息仅仅旨在加深对本实用新型总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成本领域技术人员所公知的现有技术。
技术实现要素:
4.本实用新型的目的在于提供一种四轮电动车座椅自动平衡控制系统,通过电子陀螺仪检测电动车座椅的倾斜角度和加速度数据,通过单片机以pwm方式控制电动推杆ⅰ或电动推杆ⅱ电机的快慢速度以调整电动车座椅达到接近0
°
范围。
5.为解决上述技术问题,本实用新型提供的技术方案在于:
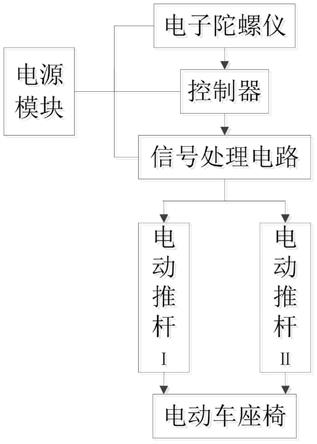
6.本实用新型提供的四轮电动车座椅自动平衡控制系统,包括电动车座椅、电子陀螺仪、控制器、信号处理电路、电动推杆ⅰ、电动推杆ⅱ、电源模块和底座,电子陀螺仪设置在电动车座椅的正下方以采集电动车座椅的左右倾斜角度和加速度数据,电子陀螺仪与控制器连接,控制器通过信号处理电路分别与电动推杆ⅰ及电动推杆ⅱ连接,电动推杆ⅰ及电动推杆ⅱ设置在电动车座椅的左右两侧,电源模块分别与电子陀螺仪、控制器、信号处理电路、电动推杆ⅰ及电动推杆ⅱ连接,电动推杆ⅰ及电动推杆ⅱ与底座连接。
7.进一步地,还包括设置在电动车座椅下方的前支架和后支架,前支架和后支架与底座连接。
8.进一步地,控制器采用单片机。
9.进一步地,信号处理电路包括调理电路ⅰ和调理电路ⅱ,调理电路ⅰ和调理电路ⅱ的一端分别与单片机的一个输出端连接,调理电路ⅰ和调理电路ⅱ的另一端分别与电动推杆ⅰ及电动推杆ⅱ连接。
10.进一步地,调理电路ⅰ包括y轴调理电路ⅰ和z轴调理电路ⅰ,调理电路ⅱ包括y轴调理电路ⅱ和z轴调理电路ⅱ。
11.进一步地,y轴调理电路ⅰ包括电阻rta1、电阻rta2、电阻rta3、电阻rta4、电阻rta5、电阻rta6、电阻rta7、电阻rta8、电阻rta9、电阻rta10、电阻rta11、电阻rta12、电容cta1、电容cta2、电容cta3、电容cta4、电容cta5、二极管dta1、二极管dta2、三极管qta1、三极管qta2、三极管qta3、三极管qta4、三极管qta5、三极管qta6、场效应管vta1和场效应管vta2,三极管qta1的基极依次通过电阻rta4与电阻rta7接地,三极管qta1的集电极通过电
阻rta5、二极管dta2和电容 cta5接地,三极管qta1的发射极通过电阻rta6接地;三极管qta2的基极分别与电阻rta5和三极管qta1的集电极连接,三极管qta2的集电极分别与二极管dta2及电容cta3连接,三极管qta2的发射极分别与电阻rta2、电阻rta3及三极管qta3连接;三极管qta3的基极和集电极之间设有电阻rta2和二极管dta1,三极管qta3的发射极与电阻rta3及电阻 rta1连接,三极管qta3的集电极和发射极之间设有电容cta2,电容cta2 的两端设有场效应管vta1,场效应管vta1与场效应管vta2连接,场效应管vta1的另一端与电容cta1连接,三极管qta4的基极连接有电源模块和电阻rta10,三极管qta4的发射极通过电阻rta11与电阻rta12连接,三极管qta5的发射极通过电阻rta8与三极管qta6的集电极连接,场效应管vta2的两端连接有电阻rta1。
12.进一步地,z轴调理电路ⅰ包括电阻rtb1、电阻rtb2、电阻rtb3、电阻rtb4、电阻rtb5、电阻rtb6、电阻rtb7、电阻rtb8、电阻rtb9、电阻rtb10、电阻rtb11、电阻rtb12、电容ctb1、电容ctb2、电容ctb3、电容ctb4、电容ctb5、二极管dtb1、二极管dtb2、三极管qtb1、三极管qtb2、三极管qtb3、三极管qtb4、三极管qtb5、三极管qtb6、场效应管vtb1和场效应管vtb2,三极管qtb1的基极依次通过电阻rtb4与电阻rtb7接地,三极管qtb1的集电极通过电阻rtb5、二极管dtb2和电容 ctb5接地,三极管qtb1的发射极通过电阻rtb6接地;三极管qtb2的基极分别与电阻rtb5和三极管qtb1的集电极连接,三极管qtb2的集电极分别与二极管dtb2及电容ctb3连接,三极管qtb2的发射极分别与电阻 rtb2、电阻rtb3及三极管qtb3连接;三极管qtb3的基极和集电极之间设有电阻rtb2和二极管dtb1,三极管qtb3的发射极与电阻rtb3及电阻 rtb1连接,三极管qtb3的集电极和发射极之间设有电容ctb2,电容ctb2 的两端设有场效应管vtb1,场效应管vtb1与场效应管vtb2连接,场效应管vtb1的另一端与电容ctb1连接,三极管qtb4的基极连接有电源模块和电阻rtb10,三极管qtb4的发射极通过电阻rtb11与电阻rtb12连接,三极管qtb5的发射极通过电阻rtb8与三极管qtb6的集电极连接,场效应管vtb2的两端连接有电阻rtb1。
13.进一步地,y轴调理电路ⅱ包括电阻rtc1、电阻rtc2、电阻rtc3、电阻rtc4、电阻rtc5、电阻rtc6、电阻rtc7、电阻rtc8、电阻rtc9、电阻rtc10、电阻rtc11、电阻rtc12、电容ctc1、电容ctc2、电容ctc3、电容ctc4、电容ctc5、二极管dtc1、二极管dtc2、三极管qtc1、三极管qtc2、三极管qtc3、三极管qtc4、三极管qtc5、三极管qtc6、场效应管vtc1和场效应管vtc2,三极管qtc1的基极依次通过电阻rtc4与电阻rtc7接地,三极管qtc1的集电极通过电阻rtc5、二极管dtc2和电容 ctc5接地,三极管qtc1的发射极通过电阻rtc6接地;三极管qtc2的基极分别与电阻rtc5和三极管qtc1的集电极连接,三极管qtc2的集电极分别与二极管dtc2及电容ctc3连接,三极管qtc2的发射极分别与电阻 rtc2、电阻rtc3及三极管qtc3连接;三极管qtc3的基极和集电极之间设有电阻rtc2和二极管dtc1,三极管qtc3的发射极与电阻rtc3及电阻 rtc1连接,三极管qtc3的集电极和发射极之间设有电容ctc2,电容ctc2 的两端设有场效应管vtc1,场效应管vtc1与场效应管vtc2连接,场效应管vtc1的另一端与电容ctc1连接,三极管qtc4的基极连接有电源模块和电阻rtc10,三极管qtc4的发射极通过电阻rtc11与电阻rtc12连接,三极管qtc5的发射极通过电阻rtc8与三极管qtc6的集电极连接,场效应管vtc2的两端连接有电阻rtc1。
14.进一步地,z轴调理电路ⅱ包括电阻rtd1、电阻rtd2、电阻rtd3、电阻rtd4、电阻rtd5、电阻rtd6、电阻rtd7、电阻rtd8、电阻rtd9、电阻rtd10、电阻rtd11、电阻rtd12、电容
ctd1、电容ctd2、电容ctd3、电容ctd4、电容ctd5、二极管dtd1、二极管dtd2、三极管qtd1、三极管qtd2、三极管qtd3、三极管qtd4、三极管qtd5、三极管qtd6、场效应管vtd1和场效应管vtd2,三极管qtd1的基极依次通过电阻rtd4与电阻rtd7接地,三极管qtd1的集电极通过电阻rtd5、二极管dtd2和电容 ctd5接地,三极管qtd1的发射极通过电阻rtd6接地;三极管qtd2的基极分别与电阻rtd5和三极管qtd1的集电极连接,三极管qtd2的集电极分别与二极管dtd2及电容ctd3连接,三极管qtd2的发射极分别与电阻 rtd2、电阻rtd3及三极管qtd3连接;三极管qtd3的基极和集电极之间设有电阻rtd2和二极管dtd1,三极管qtd3的发射极与电阻rtd3及电阻 rtd1连接,三极管qtd3的集电极和发射极之间设有电容ctd2,电容ctd2 的两端设有场效应管vtd1,场效应管vtd1与场效应管vtd2连接,场效应管vtd1的另一端与电容ctd1连接,三极管qtd4的基极连接有电源模块和电阻rtd10,三极管qtd4的发射极通过电阻rtd11与电阻rtd12连接,三极管qtd5的发射极通过电阻rtd8与三极管qtd6的集电极连接,场效应管vtd2的两端连接有电阻rtd1。
15.结合以上技术方案,本实用新型达到的有益效果在于:
16.本实用新型所述的四轮电动车座椅自动平衡控制系统,设置有电子陀螺仪、控制器、电动推杆ⅰ和电动推杆ⅱ,电子陀螺仪用于检测电动车座椅左右朝着那边倾斜和倾斜的角度并将信号传递给控制器,控制器控制电动推杆ⅰ和电动推杆ⅱ动作使电动车座椅平衡。具体地,当地面出现凹凸不平时电动车座椅通过电子陀螺仪检测倾斜角度和加速度数据,控制器根据倾斜角度的大小控制电动推杆ⅰ和电动推杆ⅱ调整的快慢使电动车座椅达到平衡状态;当电动车转向时由于离心力的作用使车辆及电动车座椅出现倾斜,电子陀螺仪检测倾斜角度,控制电动推杆ⅰ或电动推杆ⅱ调整电动车座椅达到平衡状态。本实用新型增加了电动车行车安全,并增加了乘坐舒适性。
附图说明
17.为了更清楚的说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单的介绍,显而易见的,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1为本实用新型实施例提供的结构示意图;
19.图2为电动车座椅的仰视图;
20.图3为电动车座椅左右倾斜时的示意图;
21.图4为控制原理图;
22.图5为y轴调理电路ⅰ的电路图;
23.图6为z轴调理电路ⅰ的电路图;
24.图7为y轴调理电路ⅱ的电路图;
25.图8为z轴调理电路ⅱ的电路图。
26.图标:1、电动车座椅;2、电动推杆ⅰ;3、电动推杆ⅱ;4、前支架;5、后支架;6、电子陀螺仪。
的两端设有场效应管vta1,场效应管vta1与场效应管vta2连接,场效应管vta1另一端与电容cta1连接,三极管qta4的基极连接有电源模块和电阻rta10,三极管qta4的发射极通过电阻rta11与电阻rta12连接,三极管qta5的发射极通过电阻rta8与三极管qta6的集电极连接,场效应管vta2的两端连接有电阻rta1。
34.如图6所示,z轴调理电路ⅰ包括电阻rtb1、电阻rtb2、电阻rtb3、电阻rtb4、电阻rtb5、电阻rtb6、电阻rtb7、电阻rtb8、电阻rtb9、电阻rtb10、电阻rtb11、电阻rtb12、电容ctb1、电容ctb2、电容ctb3、电容ctb4、电容ctb5、二极管dtb1、二极管dtb2、三极管qtb1、三极管qtb2、三极管qtb3、三极管qtb4、三极管qtb5、三极管qtb6、场效应管vtb1和场效应管vtb2,三极管qtb1的基极依次通过电阻rtb4与电阻rtb7接地,三极管qtb1的集电极通过电阻rtb5、二极管dtb2和电容 ctb5接地,三极管qtb1的发射极通过电阻rtb6接地;三极管qtb2的基极分别与电阻rtb5和三极管qtb1的集电极连接,三极管qtb2的集电极分别与二极管dtb2及电容ctb3连接,三极管qtb2的发射极分别与电阻 rtb2、电阻rtb3及三极管qtb3连接;三极管qtb3的基极和集电极之间设有电阻rtb2和二极管dtb1,三极管qtb3的发射极与电阻rtb3及电阻 rtb1连接,三极管qtb3的集电极和发射极之间设有电容ctb2,电容ctb2 的两端设有场效应管vtb1,场效应管vtb1与场效应管vtb2连接,场效应管vtb1的另一端与电容ctb1连接,三极管qtb4的基极连接有电源模块和电阻rtb10,三极管qtb4的发射极通过电阻rtb11与电阻rtb12连接,三极管qtb5的发射极通过电阻rtb8与三极管qtb6的集电极连接,场效应管vtb2的两端连接有电阻rtb1。
35.如图7所示,y轴调理电路ⅱ包括电阻rtc1、电阻rtc2、电阻rtc3、电阻rtc4、电阻rtc5、电阻rtc6、电阻rtc7、电阻rtc8、电阻rtc9、电阻rtc10、电阻rtc11、电阻rtc12、电容ctc1、电容ctc2、电容ctc3、电容ctc4、电容ctc5、二极管dtc1、二极管dtc2、三极管qtc1、三极管qtc2、三极管qtc3、三极管qtc4、三极管qtc5、三极管qtc6、场效应管vtc1和场效应管vtc2,三极管qtc1的基极依次通过电阻rtc4与电阻rtc7接地,三极管qtc1的集电极通过电阻rtc5、二极管dtc2和电容 ctc5接地,三极管qtc1的发射极通过电阻rtc6接地;三极管qtc2的基极分别与电阻rtc5和三极管qtc1的集电极连接,三极管qtc2的集电极分别与二极管dtc2及电容ctc3连接,三极管qtc2的发射极分别与电阻 rtc2、电阻rtc3及三极管qtc3连接;三极管qtc3的基极和集电极之间设有电阻rtc2和二极管dtc1,三极管qtc3的发射极与电阻rtc3及电阻 rtc1连接,三极管qtc3的集电极和发射极之间设有电容ctc2,电容ctc2 的两端设有场效应管vtc1,场效应管vtc1与场效应管vtc2连接,场效应管vtc1的另一端与电容ctc1连接,三极管qtc4的基极连接有电源模块和电阻rtc10,三极管qtc4的发射极通过电阻rtc11与电阻rtc12连接,三极管qtc5的发射极通过电阻rtc8与三极管qtc6的集电极连接,场效应管vtc2的两端连接有电阻rtc1。
36.如图8所示,z轴调理电路ⅱ包括电阻rtd1、电阻rtd2、电阻rtd3、电阻rtd4、电阻rtd5、电阻rtd6、电阻rtd7、电阻rtd8、电阻rtd9、电阻rtd10、电阻rtd11、电阻rtd12、电容ctd1、电容ctd2、电容ctd3、电容ctd4、电容ctd5、二极管dtd1、二极管dtd2、三极管qtd1、三极管qtd2、三极管qtd3、三极管qtd4、三极管qtd5、三极管qtd6、场效应管vtd1和场效应管vtd2,三极管qtd1的基极依次通过电阻rtd4与电阻rtd7接地,三极管qtd1的集电极通过电阻rtd5、二极管dtd2和电容 ctd5接地,三极管qtd1的发射极通过电阻rtd6接地;三极管qtd2的基极分别与电阻rtd5和三极管qtd1的集电极连接,三极管qtd2的集电极分别与二极
管dtd2及电容ctd3连接,三极管qtd2的发射极分别与电阻 rtd2、电阻rtd3及三极管qtd3连接;三极管qtd3的基极和集电极之间设有电阻rtd2和二极管dtd1,三极管qtd3的发射极与电阻rtd3及电阻 rtd1连接,三极管qtd3的集电极和发射极之间设有电容ctd2,电容ctd2 的两端设有场效应管vtd1,场效应管vtd1与场效应管vtd2连接,场效应管vtd1的另一端与电容ctd1连接,三极管qtd4的基极连接有电源模块和电阻rtd10,三极管qtd4的发射极通过电阻rtd11与电阻rtd12连接,三极管qtd5的发射极通过电阻rtd8与三极管qtd6的集电极连接,场效应管vtd2的两端连接有电阻rtd1。
37.本实用新型通过单片机控制,开机初始化并检测电子陀螺仪6是否工作正常,工作正常进入实时控制状态,否则电子陀螺仪6工作不正常报警;进入控制状态后检测电子陀螺仪6的横滚角(
‑
90
°
~0
°
~90
°
) 和加速度数据,根据检测的
±
角度大小和加速度数据计算给定电动推杆ⅰ2和电动推杆ⅱ3电机的pwm速度控制数据,来控制调整电动车座椅1 的快慢达到接近0
°
范围。
38.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1