车辆及其前灯控制装置的制作方法
1.本实用新型涉及车辆技术领域,具体涉及一种车辆的前灯控制装置、一种车辆。
背景技术:
2.随着国内外汽车工业的迅速发展,汽车车灯从单一的照明功能向智能化方向发展,由简单的供电点亮到智能控制车灯的变化,包括灯光的强度,亮灭的频率和时序等等多种功能。
3.但随着车辆的电子化程度逐渐提高,电子控制单元(ecu,electronic control unit)占领了整个汽车,从防抱死制动系统、四轮驱动系统、电控自动变速器、主动悬架系统、安全气囊系统,逐渐延伸到了车身安全、网络、娱乐、传感控制系统等。就统计数据显示,各级别汽车ecu数量都在逐年递增,一些高端车型甚至突破百个。
4.汽车电子软件爆炸式增长,对电子电气构架带来了巨大的挑战。
技术实现要素:
5.本实用新型为解决上述技术问题,提供了一种车辆的前灯控制装置,该控制装置将车辆的前灯控制采用集成化架构,利用整车can(controller area network,控制器局域网络)网络和lin(local interconnect network,局域互联网络)网络,集成近光灯和远光灯的自动调节功能、前灯自动清洁功能,可以简化车辆的电子电气架构。
6.本实用新型还提供一种车辆。
7.本实用新型采用的技术方案如下:
8.本实用新型第一方面提出了一种车辆的车灯控制装置,包括:can通信模块、lin通信模块、mcu(microcontroller unit,微控制单元)、adb(adaptive driving beam,自适应远光灯)驱动模块、afs(adaptive front
‑
lighting system,自适应前照灯)驱动模块、als(automatic headlamp leveling system,自动前照灯调平系统)驱动模块,其中,所述can通信模块与整车can总线相连,所述can通信模块用于从整车can总线获取can报文;所述lin通信模块与整车lin总线相连,所述lin通信模块用于从所述整车lin总线获取lin报文;所述adb驱动模块与车辆的远光灯相连,所述adb驱动模块用于驱动所述远光灯;所述afs驱动模块与车辆的近光灯相连,所述afs驱动模块用于驱动所述近光灯;所述als驱动模块与近光灯调节电机和清洁电机相连,所述als驱动模块用于驱动所述近光灯调节电机,以调节所述近光灯的照射角度,所述als驱动模块还用于驱动所述清洁电机,以通过所述清洁电机带动设置在所述前灯内罩内的清洗喷头移动;所述mcu分别与所述can模块、所述lin模块、所述adb驱动模块、所述afs驱动模块、所述als驱动模块相连,所述mcu用于解析所述can报文以获取远光灯控制指令,并根据所述远光灯控制指令对所述adb驱动模块进行控制,所述mcu还用于解析所述lin报文以获取近光灯控制指令,并根据所述近光灯控制指令对所述afs驱动模块和所述als驱动模块进行控制。
9.具体地,上述的装置还包括:多通道线性恒流驱动模块,所述多通道线性恒流驱动
模块与mcu相连,所述mcu还用于根据动态控制指令对所述多通道线性恒流驱动模块进行控制,以实现所述前灯的动态点亮。
10.进一步地,上述的装置还包括:激光测距驱动模块,所述激光测距驱动模块与所述mcu相连,所述激光测距驱动模块用于驱动激光测距装置测量当前车辆与前车的距离,所述mcu还用于获取所述车辆与前车的距离,并在所述距离小于预设距离时,控制提示装置发出第一提示信息。
11.更进一步地,上述的装置还包括:摄像头驱动模块,所述摄像头驱动模块与所述mcu相连,所述摄像头驱动模块用于驱动设置在车辆前挡风玻璃的上部的摄像头采集车辆前方图像,所述mcu还用于根据所述前方图像识别车辆前方行进方向的交通信号灯状态,并在所述交通信号灯为红灯状态或黄灯状态,控制提示装置发出第二提示信息。
12.本实用新型第二方面的提出了一种车辆,包括本实用新型第一方面所述的车辆的前灯控制装置。
13.本实用新型的有益效果:
14.本实用新型将车辆的前灯控制采用集成化架构,利用整车can网络和lin网络,集成近光灯和远光灯的自动调节功能、前灯自动清洁功能,可以简化车辆的电子电气架构。
附图说明
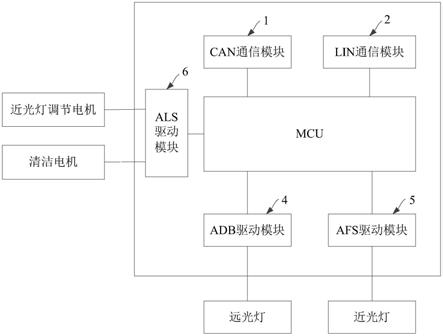
15.图1是根据本实用新型一个实施例的车辆的前灯控制装置的方框示意图;
16.图2是根据本实用新型另一个实施例的车辆的前灯控制装置的方框示意图。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.图1是根据本实用新型一个实施例的车辆的前灯控制装置的方框示意图。如图1所示,该装置包括:can通信模块1、lin通信模块2、mcu、adb驱动模块4、afs驱动模块5、als驱动模块6。
19.其中,can通信模块1与整车can总线相连,can通信模块1用于从整车can总线获取can报文;lin通信模块2与整车lin总线相连,lin通信模块2用于从整车lin总线获取lin报文;adb驱动模块3与车辆的远光灯相连,adb驱动模块3用于驱动远光灯;afs驱动模块4与车辆的近光灯相连,afs驱动模块4用于驱动近光灯;als驱动模块5与近光灯调节电机和清洁电机相连,als驱动模块5用于驱动近光灯调节电机,以调节近光灯的照射角度,als驱动模块5还用于驱动清洁电机,以通过清洁电机带动设置在前灯内罩内的清洗喷头移动;mcu分别与can模块1、lin模块2、adb驱动模块3、afs驱动模块4、als驱动模块5、近光灯调节电机和清洁电机相连,mcu用于解析can报文以获取远光灯控制指令,并根据远光灯控制指令对adb驱动模块4进行控制,mcu还用于解析lin报文以获取近光灯控制指令,并根据近光灯控制指令对afs驱动模块5和als驱动模块6进行控制。
20.具体地,adb驱动模块4可以驱动远光灯,mcu通过对adb驱动模块4的控制可以实现
远光灯照射亮度的调节。afs驱动模块5可以驱动近光灯,mcu通过对afs驱动模块5的控制,可以实现近光灯照射亮度的自动调节,依据行驶状况来控制实现前近光灯的最优布光,提高驾驶安全。als驱动模块6可以驱动近光灯调节电机和清洁电机,近光灯调节电机可以带动近光灯移动,实现近光灯照射角度或者高度,清洁电机可以带动设置在前灯内罩内的清洗喷头移动,实现前灯的清洗。
21.mcu可以实时获取can报文和lin报文,并进行解析,根据解析结果获取相应的控制指令,根据控制指令对adb驱动模块4、afs驱动模块5、als驱动模块6进行控制即可,由此,实现近光灯和远光灯的自动调节功能、前灯自动清洁功能。
22.由此,该控制装置将车辆的前灯控制采用集成化架构,利用整车can网络和lin网络,集成近光灯和远光灯的自动调节功能、前灯自动清洁功能,可以简化车辆的电子电气架构。
23.根据本实用新型的一个实施例,如图2所示,还可以包括:多通道线性恒流驱动模块7。多通道线性恒流驱动模块7与mcu相连,mcu还用于根据动态控制指令对多通道线性恒流驱动模块进行控制,以实现前灯的动态点亮。
24.具体地,多通道线性恒流驱动模块7可以实现前灯的矩阵光光源进行控制,实现前灯的动态点亮,例如动态流水点亮。mcu可以根据实际需求通过对多通道线性恒流驱动模块7进行控制,实现前灯的动态点亮。
25.根据本实用新型的一个实施例,如图2所示,上述的控制装置还可以包括:激光测距驱动模块8,激光测距驱动模块8与mcu相连,激光测距驱动模块8用于驱动激光测距装置测量当前车辆与前车的距离,mcu还用于获取车辆与前车的距离,并在距离小于预设距离时,控制提示装置发出第一提示信息。
26.具体地,激光测距装置可以设置在车辆的车头前端,激光测距装置可以测量当前车辆与前车的距离,激光测距驱动模块8可以驱动激光测距装置工作,mcu可以实时获取车辆与前车的距离并进行判断,如果判断车辆与前车的距离小于预设距离,例如5m,说明当前车辆与前车距离较近,mcu控制提示装置发出相应的提示信息,提醒驾驶员保持车距,提示装置可以为仪表盘、中控显示屏、语音模块、蜂鸣器或喇叭等,提示信息可以为文字、语音、音乐等等,能达到车距提醒效果即可。
27.根据本实用新型的一个实施例,如图2所示,上述的控制装置还可以包括:摄像头驱动模块9,摄像头驱动模块9与mcu相连,摄像头驱动模块9用于驱动设置在车辆前挡风玻璃的上部的摄像头采集车辆前方图像,mcu还用于根据前方图像识别车辆前方行进方向的交通信号灯状态,并在交通信号灯为红灯状态或黄灯状态,控制提示装置发出第二提示信息。
28.具体地,摄像头驱动模块9可以驱动设置在车辆前挡风玻璃的上部的摄像头采集车辆前方图像,mcu可以对采集的图像进行分析,以获取车辆行进方向交通信号灯的状态,并在判断交通信号灯为红灯状态或黄灯状态时,控制相应的提示装置发出提醒。提示装置可以为仪表盘、中控显示屏、语音模块等,提示信息可以为文字、语音等等,能达到信号灯状态提醒效果即可。由此,可以在交通信号灯为红灯状态或黄灯状态时提前对驾驶员发出提醒,提高驾驶安全。
29.综上,根据本实用新型实施例的车辆的前灯控制装置,通过can通信模块用于从整
车can总线获取can报文,通过lin通信模块用于从整车lin总线获取lin报文,adb驱动模块驱动远光灯,afs驱动模块驱动近光灯,als驱动模块驱动近光灯调节电机,以调节近光灯的照射角度,als驱动模块还驱动清洁电机,以通过清洁电机带动设置在前灯内罩内的清洗喷头移动,mcu可以解析can报文以获取远光灯控制指令,并根据远光灯控制指令对adb驱动模块进行控制,mcu还可以解析lin报文以获取近光灯控制指令,并根据近光灯控制指令对afs驱动模块和als驱动模块进行控制。由此,该控制装置将车辆的前灯控制采用集成化架构,利用整车can网络和lin网络,集成近光灯和远光灯的自动调节功能、前灯自动清洁功能,可以简化车辆的电子电气架构。
30.此外,本实用新型还提出一种车辆,包括本实用新型上述的车辆的前灯控制装置。
31.根据本实用新型实施例的车辆,通过上述的车辆的前灯控制装置,将车辆的前灯控制采用集成化架构,利用整车can网络和lin网络,集成近光灯和远光灯的自动调节功能、前灯自动清洁功能,可以简化车辆的电子电气架构。
32.在本实用新型的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
33.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
34.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
35.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
36.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1