通气装置的制作方法
1.本实用新型涉及例如用于车辆,且尤其用于机动车辆的通气装置的领域。
背景技术:
2.可以提供一种包括基本平行且可定向为引导离开通气装置的空气流的叶片的通气装置,叶片的定向由控制构件控制,该控制构件可由用户手动操纵。
技术实现要素:
3.本实用新型的目的之一是提供一种具有用于控制可定向叶片的定向的改进人体工程学的通气装置。
4.为此,本实用新型提供了一种通气装置,其包括受控叶片,这些受控叶片可定向为沿期望方向引导离开该通气装置的空气流,每个受控叶片被安装成围绕第一旋转轴线枢转,受控叶片的第一旋转轴线彼此平行并且受控叶片旋转同步;以及控制构件,其安装成围绕平行于受控叶片的第一旋转轴线的第二旋转轴线枢转,控制构件联接至受控叶片中被称为主动受控叶片的一个受控叶片,使得控制构件以第一旋转角度的旋转使所述主动受控叶片的定向改变第二旋转角度,该第二旋转角度严格大于或严格小于第一旋转角度。
5.控制构件联接到同步受控叶片中的一个,使得控制构件以第一旋转角度的旋转导致该主动受控叶片以严格大于或小于所述第一旋转角度的第二旋转角旋转,从而允许通过调整控制构件实现受控叶片的期望定向所必需的位移来控制受控叶片的定向,这改善了人体工程学。
6.根据特定的实施方式,通气装置包括以下可选特征中的一个或多个,这些特征可以单独地或以任何技术上可能的组合来采用:
7.‑
控制构件通过经由第一铰接件铰接在控制构件上并且经由第二铰接件铰接在所述主动受控叶片上的控制杆而联接至所述主动受控叶片。
8.‑
第一铰接件与控制构件的第二旋转轴线之间的第一距离严格大于,分别地严格小于,第二铰接件与主动受控叶片的第一旋转轴线之间的第二距离;
9.‑
受控叶片的第一旋转轴线沿着对准方向对准;
10.‑
控制构件的第二旋转轴线沿对准方向与受控叶片的第一旋转轴线对准;
11.‑
借助铰接在每个受控叶片上的同步杆使受控叶片旋转同步;
12.‑
控制构件是叶片状的,控制构件能够根据其围绕其第二旋转轴线的定向来偏转离开通气装置的空气流;
13.‑
叶片状控制构件设置在受控叶片中的两个受控叶片之间;
14.‑
受控叶片对称地设置在叶片状控制构件的两侧;
15.‑
叶片状控制构件和受控叶片以第一旋转轴线或第二旋转轴线之间的恒定步度彼此并排设置;
16.‑
受控叶片彼此平行;
17.‑
该通气装置包括两组受控叶片,该两组受控叶片设置在叶片状控制构件的两侧;
18.‑
两组受控叶片具有相同数量的受控叶片;
19.‑
该通气装置具有中性构造,其中叶片状控制构件和受控叶片基本上彼此平行。
附图说明
20.通过阅读下面仅以非限制性示例方式给出并参考附图的描述,将更好地理解本实用新型及其优点,其中:
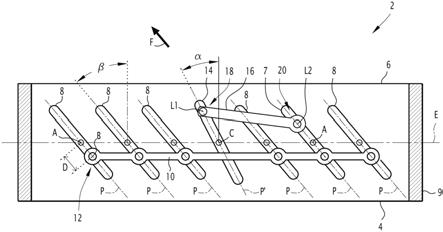
21.图1至图3是不同构造的通气装置的截面图。
具体实施方式
22.图1所示的通气装置2例如是车辆的通气装置,特别是机动车辆的通气装置。
23.通气装置2被构造成将空气流f喷射到例如车辆的舱室中。
24.通气装置2具有接收空气流的空气入口4以及空气流离开通气装置2所通过的空气出口6。空气入口4用于连接至通风系统的通气管道的出口。
25.通气装置2具有受控的叶片7、8,该叶片7、8可定向成沿期望方向引导离开通气装置2的空气流。
26.通气装置2在此包括具有两个开口端部的管状壳体9,其中一个开口端部限定空气入口4且另一开口端部限定空气出口6。受控叶片7、8安装在壳体9 的内部以沿期望方向引导离开的空气流。
27.通气装置2具有取决于受控叶片7、8的定向的不同构造。通气装置2具有例如其中空气流f基本上不偏转的中性构造(图1)以及其中空气流f偏向一侧(图2)或偏向另一侧(图3)的偏转构造(图2和3)。
28.在示例性实施例中,受控叶片7、8的定向允许空气流f在基本水平平面中偏转,即向左或向右偏转。在另一示例性实施例中,受控叶片7、8的定向允许空气流f在基本竖直平面内偏转,即向上或向下偏转。
29.每个受控叶片7、8安装为围绕相应第一旋转轴线a枢转,受控叶片7、8 的第一旋转轴线a是不同的并且彼此平行。
30.受控叶片7、8的第一旋转轴线a例如沿对准方向e对准。
31.每个受控叶片7、8例如沿着延伸平面p延伸,每个受控叶片7、8的第一旋转轴线a平行于该延伸平面p并且优选地包含在该延伸平面p中。
32.受控叶片7、8并排设置。
33.受控叶片7、8彼此同步。受控叶片7、8中的一个以确定旋转角度旋转导致其他受控叶片7、8中的每一个以相同旋转角度旋转。
34.为此,通气装置2包括例如同步杆10,该同步杆10借助于相应同步铰接件12铰接在每个受控叶片7、8上。
35.每个同步铰接件12被构造成允许对应受控叶片7、8和同步杆10之间围绕平行于对应受控叶片7、8的第一旋转轴线a的同步轴线b的相对旋转。每个同步铰接件12例如是枢轴连接或球形连接。
36.每个受控叶片8的第一旋转轴线a和同步轴线b是不同的。对于每个受控叶片7、8,
第一旋转轴线a和同步轴线b之间的距离d是相同的。
37.当受控叶片7、8的旋转轴a彼此对准时,受控叶片7、8的同步轴b也彼此对准。
38.受控叶片7、8优选地基本上彼此平行。由于受控叶片同步,因此其始终保持彼此平行。
39.通气装置2具有安装成围绕第二旋转轴线c枢转的控制构件14,该控制构件14可围绕其第二旋转轴线c定向,优选手动地定向,以控制受控叶片7、 8的定向。
40.控制构件14的第二旋转轴线c平行于受控叶片7、8的第一旋转轴线a。控制构件14的第二旋转轴线c例如与每个受控叶片7、8的第一旋转轴线a 不同。
41.在其中受控叶片7、8的第一旋转轴线a沿着对准方向e对准的示例性实施例中,控制构件14的第二旋转轴线c也沿着对准方向e与受控叶片7、8 中的第一旋转轴线a对准。
42.控制构件14联接至受控叶片7、8中的一个,使得控制构件14以第一旋转角度α围绕其第二旋转轴线c的旋转导致每个受控叶片7、8围绕其轴线旋转a旋转第二旋转角度β,该第二旋转角度β严格大于第一旋转角度α或严格小于第一旋转角度α。
43.在图1至3所示的实施例中,控制构件14联接至受控叶片7、8中的一个,使得控制构件14以第一旋转角度α围绕其第二旋转轴线c的旋转引起每个受控叶片7、8围绕其第一旋转轴线a旋转第二旋转角度β,该第二旋转角度β严格大于第一旋转角度α。
44.在另一示例性实施例中,控制构件14联接到受控叶片7、8中的一个,使得控制构件14以第一旋转角度围绕其第二旋转轴线c的旋转导致每个受控叶片7、8围绕其第一旋转轴线a旋转第二旋转角度,该第二旋转角度严格小于第一旋转角度。
45.优选地,控制构件14联接到受控叶片7、8中的一个,使得控制构件14 围绕其第二旋转轴线c在一个方向上的旋转引起每个受控叶片7、8围绕其第一旋转轴线a沿相同方向旋转。
46.更具体地,控制构件14联接到受控叶片7、8中的一个(在下文中被称为“主动受控叶片7”),使得控制构件14以第一旋转角度α围绕其第二旋转轴线 c的旋转导致主动受控叶片7围绕其第一旋转轴线a旋转第二旋转角度β,该第二旋转角度β严格大于第一旋转角度α或严格小于第一旋转角度α。
47.由于受控叶片7、8彼此之间的同步(这里通过同步杆10),因此其他受控叶片8(以下称为“从动受控叶片”8)跟随主动受控叶片7。
48.在示例性实施例中,控制构件14通过分别经由第一控制铰接件18和第二控制铰接件20而铰接在控制构件14和主动受控叶片7上的控制杆16而联接到主动受控叶片7。
49.控制杆16以距控制构件14的第二旋转轴线c第一距离d1铰接在控制构件14上并且以距主动受控叶片7的第一旋转轴线a第二距离d2铰接在主动受控叶片7上,该第一距离d1不同于第二距离d2。
50.在图1至3所示的示例性实施例中,第一距离d1严格大于第二距离d2 (图1)。
51.因此,控制构件14以第一旋转角度α的旋转引起主动受控叶片7旋转第二旋转角度β,该第二旋转角度β严格大于第一旋转角度α(图2和3)。
52.在另一个示例性实施例中,第一距离d1严格小于第二距离d2。
53.因此,控制构件14以第一旋转角度的旋转引起主动受控叶片7旋转第二旋转角度,该第二旋转角度严格小于第一旋转角度。
54.第一控制铰接件18被构造成允许控制构件14和控制杆16之间围绕第一铰接轴线l1的相对旋转,该第一铰接轴线l1平行于受控叶片7、8的第一旋转轴线a并且平行于控制构件14的第二旋转轴线c。
55.第二控制铰接件20被构造成允许主动受控叶片7和控制杆16之间围绕第二铰接轴线l2的相对旋转,该第二铰接轴线l2平行于受控叶片7、8的第一旋转轴线a并且平行于控制构件14的第二旋转轴线c。
56.第一控制铰接件18例如是枢转连接或球形连接。第二控制铰接件20例如是枢转连接或球形连接。
57.第一距离d1和第二距离d2分别对应于控制构件14的第二旋转轴线c 与第一铰接轴线l1之间的距离以及主动受控叶片7的第一旋转轴线a与第二铰接轴线l2之间的距离。
58.因此,在图1至图3的其中第二旋转角度β严格大于第一旋转角度α的示例中,第一铰接轴线l1位于距控制构件14的第二旋转轴线c第一距离d1 处并且第二铰接轴线l2位于距主动受控叶片7的第一旋转轴线a第二距离 d2处,第二距离d2严格小于第一距离d1。
59.在其中第二旋转角度严格小于第一旋转角度的另一示例性实施例中,第一铰接轴线l1位于距控制构件14的第二旋转轴线c第一距离d1处并且第二铰接轴线l2位于距主动受控叶片7的第一旋转轴线a第二距离d2处,第二距离d2严格大于第一距离d1。
60.在示例性实施例中,如图1至图3所示,控制构件14呈叶片状并且能够根据控制构件14围绕控制构件14的第二旋转轴线c的定向来偏转离开通气装置2的空气流。
61.这种叶片状控制构件14也被称为“受控叶片”。由于通过受控叶片来实现对其他叶片(即受控叶片7、8)的控制,因此这种受控叶片限定了控制构件。
62.叶片状控制单元14例如沿着延伸平面p’延伸。叶片状控制构件14的延伸平面p
′
优选地穿过叶片状控制构件14的第二旋转轴线c。
63.叶片状控制构件14与彼此同步的受控叶片7、8不同步。实际上,叶片状式的控制构件14的旋转引起受控叶片7、8以更大幅度或更小幅度旋转。
64.优选地,通气装置2具有中性构造(图1),其中叶片状控制构件14处于中性位置中,在该中性位置中,叶片状控制构件14基本上平行于受控叶片7、 8中的每个。
65.在叶片状控制构件14从其中性位置沿一个方向(图2)或另一方向(图3) 枢转之后,控制构件14不平行于受控叶片7、8。然而,受控叶片7、8在不同构造中仍保持彼此平行。
66.受控叶片7、8和叶片状控制构件14设置为彼此并排。
67.在示例性实施例中,受控叶片7、8和控制构件14以其旋转轴线(第一旋转轴线a或第二旋转轴线c)之间的恒定步度彼此并排设置。
68.优选地,叶片状控制构件14设置在受控叶片7、8中的两个之间。
69.例如,受控叶片7、8对称地分布在叶片状控制构件14的两侧。
70.在示例性实施例中,通风装置2包括两组22受控叶片7、8,该两组22 受控叶片7、8位于叶片状控制构件14的两侧。
71.在特定实施例中,通气装置2包括偶数个受控叶片7、8,这些受控叶片分布成位于叶片状控制构件14的两侧的两组22,两组22具有相同数量的受控叶片7、8。
72.叶片状控制构件14集成在受控叶片7、8之间,特别是当受控叶片7、8 分布在控制构件14的两侧上时,改善了人体工程学。
73.例如,叶片状控制构件14旨在由用户直接操纵以改变叶片状控制构件14 的定向并因此控制受控叶片7、8的定向。叶片状控制构件可能具有抓握按钮,这方便用户对其进行操纵。
74.在这种示例性实施例中,用户直接使控制构件14围绕其第二旋转轴线c 枢转。
75.在另一示例性实施例中,控制构件14可通过借助机械传动装置而机械地联接至控制构件14的致动元件间接致动,该机械传动装置被构造成将致动元件的致动运动转换成控制构件14围绕其第二旋转轴线c的旋转的。
76.致动运动不同于围绕控制构件14的第二旋转轴线c的旋转。例如,致动运动是平移和/或围绕不同于控制构件14的第二旋转轴线c的轴线旋转的旋转。
77.致动元件例如是光标或按钮。机械传动装置例如是指/叉组件,其包括接收在叉、万向架等中的指。
78.本实用新型不限于上面描述的并且在图1至图3中示出的实施例,其他实施例也是可能的。
79.在图1至3的示例性实施例中,控制构件14本身是叶片。
80.在另一个示例性实施例中,控制构件14不是叶片并且不引导离开通气装置2的空气流。控制构件14仅具有控制受控叶片7、8的定向的功能,而没有使空气流f偏转的功能。
81.这种控制构件14呈被安装成围绕第二旋转轴线c枢转的杆的形式,用户能够作用在控制构件14上以使其枢转并因此引起受控叶片7、8中的每个以更大幅度或更小幅度的对应枢转。
82.在图1至3所示的实施例中,空气流f在控制杆16所在的一侧离开通气装置。作为变型,空气流f在与控制杆16相反的一侧离开通气装置。
83.借助本实用新型,例如呈受控叶片形状的控制构件14以一定幅度的旋转允许引起多个受控叶片以更大幅度或更小幅度旋转。受控叶片彼此旋转同步。对于用户而言,实现受控叶片的定向的控制更符合人体工程学。
84.更大幅度允许提高方向性。更小振幅允许提高精度,例如,这对于车辆中央控台特别有利。
85.在控制构件14本身是叶片的情况下,叶片状控制构件的旋转因此被放大或衰减。叶片状控制构件14可以集成至受控叶片7、8,特别是通过设置在受控叶片7、8中的两个之间。
86.在这种情况下,通气装置是特别有利的,由于其允许增加空气流的方向性或提高方向性的精度,同时对空气流的影响有限,单个叶片(即受控叶片)的定向不同于其他叶片(即受控叶片7、8)的定向。
87.在控制构件14是不具有使离开通气装置2的空气流偏转的功能的控制按钮的情况下,控制构件14及其与受控叶片7、8的连接可以通过简单的方式实现,同时允许符合人体工程学控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1