一种超重电池包多维度感应吊装机构的制作方法
1.本实用新型涉及新能源汽车的电池充换电技术领域,特别是涉及一种超重电池包多维度感应吊装机构。
背景技术:
2.随着国家一系列政策组合强化与推进了新能源汽车的使用,实现了新能源汽车在城市交通工具中比重的日益增加,同时,快捷方便的电池充电设备已经成为这一行业重要的研究方向。尤其在集装箱吊装领域中,新能源重卡不断地突破传统重卡产品进行技术升级,对市场上通常重型卡车电池包特别重,由于体积大的现状,进行电源结构清洁化、绿色电力充电成为重要关注点。但是,目前常规对电池包充电时,是通过将卡车开到充电桩附近,进行直接充电,这样充电时,耗时耗力,常对电网形成较大的用电负荷,影响整个电力系统的用电平衡,非常的不安全。
技术实现要素:
3.为了克服上述大型机械设备或生产线上的超重电池包进行如何快速充换电的技术问题,本实用新型基于对超重电池包快捷、准确地拆卸、安装的原则,将电池包通过吊装的方式进行移送,同时,区别于常规的吊装,本实用新型,能够进行三维方向的移动,具体地提供了一种超重电池包多维度感应吊装机构,包括顶板、夹板、底板、支撑柱、丝杠、x向伺服电机、y向伺服电机、z向丝杆升降机、z向三相异步电机、龙门架;所述顶板一侧通过横向传动梁固定在龙门架上x向端,另一侧面通过竖向传动梁固定在龙门架上y向端,所述x向伺服电机与横向传动梁固定连接,用于顶板沿x向提供运动动力,所述y向伺服电机与竖向传动梁固定连接,用于顶板沿y向水平面提供运动动力;
4.所述顶板底部通过四组支撑柱与夹板顶部固定连接;所述底板顶部通过四组丝杠与夹板底部固定连接;
5.所述z向丝杆升降机与丝杠传动连接,用于丝杠沿z向水平面升降;所述z向三相异步电机与z向丝杆升降机固定连接,用于提供z向丝杆升降机z向水平面运动的动力。
6.作为改进,还包括多组电池箱抓手、电池箱抓手转动装置,所述电池箱抓手设置在四组丝杠之间,通过电池箱抓手转动装置对称地固定安装在底板底部。这样的设置,能够使得电池箱抓手对底板底部的电池包进行抓取,方便安全。
7.作为改进,还包括电池箱抓手转动装置包括u型加强板、抓手连接板、固定抓手;所述抓手连接板一端通过竖板固定安装在底板上端,另一端贯穿底板与固定抓手固定连接;所述抓手连接板与底板上表面安装有u型加强板。
8.作为改进,还包括x向减速电机、y向减速电机;所述x向伺服电机的输出轴伸入x向减速电机中,通过法兰与x向减速电机)固定连接;所述y向伺服电机的输出轴伸入y向减速电机中,通过另一组法兰与y向减速电机固定连接。
9.作为改进,还包括z向传感器发射端、z向距离传感器接收端、z向重量传感器;所述
z向传感器发射端固定安装在夹板的一端,所述z向距离传感器接收端固定安装在底板的一端,所述z向重量传感器设置有四组,每一组独立地固定安装在每一根丝杠的底端。
10.有益效果:本实用新型提出了一种超重电池包多维度感应吊装机构,是基于电池包重量大,在进行充电时需要进行人工调整车辆进行对正,一方面,会对车辆驾驶员有较高的要求;另一方面,停车耗费时间长。先比较常规设计,本实用新型是通过将电池箱抓手设置在底部,再将由顶板、夹板、底板连接的整体结构沿三维方向,即x向、y向、z向进行移动,实现电池包的对准,通过抓手将电池包取出或者放下。
11.同时,本实用新型还设置了重量传感器,固定安装在四个丝杠上,能够通过每个丝杠上重量的显示数据,来判断四个丝杠受力是否一样,是否平衡,来提高了抓取超重电池包的精准度。
12.另外,本实用新型中通过设置z向传感器发射端和z向距离传感器接收端,能够获得实时的沿z向的运动距离,在电池包进行上升或下降上,准确度高。
附图说明
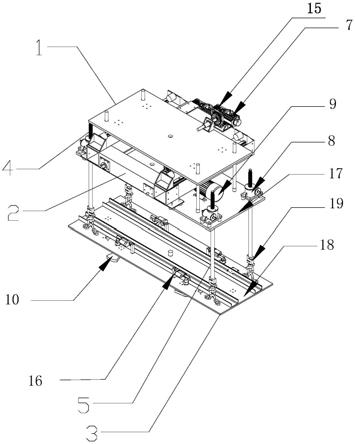
13.图1为本实用新型的结构示意图。
14.图2为本实用新型结构的俯视图。
15.图3为本实用新型电池箱抓手侧面的结构示意图。
16.附图中:顶板1、夹板2、底板3、支撑柱4、丝杠5、x向伺服电机6、y向伺服电机7、z向丝杆升降机8、z向三相异步电机9、电池箱抓手10、u型加强板11、抓手连接板12、固定抓手13、x向减速电机14、y向减速电机15、电池箱抓手转动装置16、z向传感器发射端17、z向距离传感器接收端18、z向重量传感器19。
具体实施方式
17.下面结合实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
18.一种超重电池包多维度感应吊装机构,包括顶板1、夹板2、底板3、支撑柱4、丝杠5、x向伺服电机6、y向伺服电机7、z向丝杆升降机8、z向三相异步电机9、龙门架;
19.所述顶板1一侧通过横向传动梁固定在龙门架上x向端,另一侧面通过竖向传动梁固定在龙门架上y向端,所述x向伺服电机6与横向传动梁固定连接,用于顶板1沿x向提供运动动力,所述y向伺服电机7与竖向传动梁固定连接,用于顶板1沿y向水平面提供运动动力;
20.所述顶板1底部通过四组支撑柱4与夹板2顶部固定连接;所述底板3顶部通过四组丝杠5与夹板2底部固定连接;
21.所述z向丝杆升降机8与丝杠5传动连接,用于丝杠5沿z向水平面升降;所述z向三相异步电机9与z向丝杆升降机8固定连接,用于提供z向丝杆升降机8的z向水平面运动的动力。
22.还包括多组电池箱抓手10、电池箱抓手转动装置16,所述电池箱抓手10设置在四组丝杠5之间,通过电池箱抓手转动装置16对称地固定安装在底板3底部。
23.还包括电池箱抓手转动装置15包括u型加强板11、抓手连接板12、固定抓手13;所述抓手连接板12一端通过竖板固定安装在底板3上端,另一端贯穿底板3与固定抓手13固定
连接;所述抓手连接板12与底板3上表面安装有u型加强板11。
24.还包括x向减速电机14、y向减速电机15;所述x向伺服电机6的输出轴伸入x向减速电机14中,通过法兰与x向减速电机14固定连接;所述y向伺服电机7的输出轴伸入y向减速电机15中,通过另一组法兰与y向减速电机15固定连接。
25.还包括z向传感器发射端17、z向距离传感器接收端18、z向重量传感器19;所述z向传感器发射端17固定安装在夹板2的一端,所述z向距离传感器接收端18固定安装在底板3的一端,所述z向重量传感器19设置有四组,每一组独立地固定安装在每一根丝杠的底端。
26.工作原理:当需要对电池包进行抓取的时候,调整龙门架上的x向伺服电机、y向伺服电机使得,整个吊装机构在电池包的上方,再通过z向丝杆升降机在z向三相异步电机的带动作用下,沿z向进行移动,同时,通过z向传感器发射端和z向距离传感器接收端,获得z向的实时移动距离,进一步地,通过z向重量传感器进行配合核实z向的移动距离,进行精准调整移动距离,本实用新型中使用的传感器均为现有市场上能够买到,且能实现传感器功能的任一一种都是可以的。
27.为了稳固地抓取重量较大的电池包,设置的u型加强板在底板上面,能够加大固定抓手抓取电池包后,电池箱抓手与底板之间的结合力,更稳定,使用寿命更长。
28.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1