一种前阿克曼后悬挂小车结构的制作方法
1.本实用新型涉及移动机器人技术领域,具体涉及一种前阿克曼后悬挂小车结构。
背景技术:
2.目前移动机器人通常采用差速小车结构或者全向轮小车结构。
3.(1)差速小车结构的结构形式有两种,一种是两驱动轮差速加万向轮的结构形式,即:使用两个驱动轮配合一个或几个万向轮,通过差速控制方式实现机器人的转向;另一种是四轮差速的结构形式,即:四轮都具有驱动力,轮子不能转向,通过两边轮速差实现转向。
4.两驱动轮差速加万向轮的结构形式,是当前服务机器人使用最广泛的一种小车结构。其缺点是:通过能力差、难以布置悬挂避震系统。造成其通过能力差、难以布置悬挂避震系统的原因在于万向轮自身结构决定了万向轮轮径一般较小,而且万向轮无动力。因此,两驱动轮差速加万向轮的结构形式,通常轮子和底盘刚性连接,这也决定了两驱动轮差速加万向轮结构形式的差速底盘只适合室内平坦地面。
5.而四轮差速的结构形式通常需要增加悬挂避震系统。因为如果驱动轮直接刚性连接于车架,在室外复杂地形行走时,地面的激励将会全部传导到车身及车身上配备的各种元器件上,易造成元器件的损坏,如果有摄像头,则会因为摄像头剧烈抖动,造成成像效果差,影响执行任务。增加悬挂避震系统后,直行时的抖动可以得到大大改善;但在转弯时,首先,由于该结构采用的是直接两侧轮差速的方式(类似坦克和履带式拖拉机),轮胎与地面之间存在剧烈的侧向摩擦并引起振动,由此产生的振动与减震器减震方向不平行,故该部分震动不能被减震器吸收,导致转向时依然会因为剧烈抖动影响执行任务;其次,为了克服转向时滑动摩檫的阻力,必须选择更大功率的电机,由此造成能量浪费和续航里程降低;再者,对轮胎也会产生非常严重的磨损。
6.(2)全向轮小车结构,是利用轮子圆周的滚子的横向或斜向滚动,使可以在平面上进行矢量移动。但是这种全向轮小车结构,其轮子结构复杂、成本高、负载小、滚子容易卡入异物造成行走不畅,因此,全向轮小车结构只适用于室内平坦地面。
技术实现要素:
7.本实用新型的目的在于克服现有技术的不足,提供一种抗震性强,结构简单,适用性广的前阿克曼后悬挂小车结构。
8.本实用新型的技术方案如下:
9.一种前阿克曼后悬挂小车结构,由车体、前阿克曼车轮机构、后悬挂车轮组、无线控制系统和电池组成,所述前阿克曼车轮机构、后悬挂车轮组前后设置在所述车体底部,所述无线控制系统、电池设置在所述车体底部且位于所述前阿克曼车轮机构与后悬挂车轮组之间,所述无线控制系统分别与所述前阿克曼车轮机构、后悬挂车轮组信号连接,所述电池分别与所述前阿克曼车轮机构、后悬挂车轮组、无线控制系统电性连接;
10.所述前阿克曼车轮机构包括左前轮、右前轮、连杆、左阿克曼转向座、右阿克曼转
向座、左转向轴、右转向轴、左驱动装置、右驱动装置、第一传动组件、转向舵机、第一固定座和固定板,所述左阿克曼转向座、右阿克曼转向座分别通过所述左转向轴、右转向轴转动设置在所述连杆的左右两端,所述左前轮与所述左阿克曼转向座转动连接,所述右前轮与所述右阿克曼转向座转动连接,所述连杆通过所述第一固定座固定在所述车体底部,所述左驱动装置、右驱动装置、第一传动组件、转向舵机通过所述固定板固定在所述第一固定座上,所述转向舵机的驱动轴通过所述第一传动组件与所述左驱动装置、右驱动装置的输入端传动连接,所述左驱动装置、右驱动装置的输出端分别与所述左阿克曼转向座、右阿克曼转向座连接;
11.所述连杆与车体之间设置有相称位于所述第一固定座左右两侧的第一减震装置;
12.所述后悬挂车轮组由两个相互独立的悬挂车轮组件组成,所述两个悬挂车轮组件相称位于所述电池的左右两侧,所述悬挂车轮组件由后车轮、轮毂电机和第二减震装置组成,所述后车轮与所述轮毂电机的电机轴连接,所述轮毂电机通过所述第二减震装置固定在所述车体底部。
13.进一步的,所述第一传动组件由主动齿轮、从动齿轮、传动带、传动轴和传动轮组成,所述转向舵机的驱动轴连接所述主动齿轮,所述主动齿轮通过所述传动带与所述从动齿轮传动连接,所述从动齿轮与所述传动轮之间通过所述传动轴连接,所述传动轮与所述左驱动装置、右驱动装置的输入端传动连接。
14.进一步的,所述左驱动装置由第一装置壳体、第二传动组件和第一摆杆组成,所述第二传动组件设置在所述第一装置壳体内,所述第一摆杆的一端与所述左阿克曼转向座连接,所述第一摆杆的另一端通过球销与所述第一装置壳体转动连接,且与所述第二传动组件的一端传动连接,所述第二传动组件的另一端与所述传动轮传动连接;
15.所述右驱动装置由第二装置壳体、第三传动组件和第二摆杆组成,所述第三传动组件设置在所述第二装置壳体内,所述第二摆杆的一端与所述右阿克曼转向座连接,所述第二摆杆的另一端通过球销与所述第二装置壳体转动连接,且与所述第三传动组件的一端传动连接,所述第三传动组件的另一端与所述传动轮传动连接。
16.进一步的,所述第二减震装置包括第二固定座、弹簧、活动板架和四个第三摆杆,所述轮毂电机设置在所述活动板架的底端,所述四个第三摆杆相称位于所述第二固定座、活动板架的前后两侧,且所述第三摆杆的两端分别与所述第二固定座、活动板架枢转连接,所述弹簧的一端与所述第二固定座的顶端枢转连接,所述弹簧的另一端与所述活动板架的底端枢转连接。
17.进一步的,所述电池可拆卸设置在所述车体底部。
18.相对于现有技术,本实用新型的有益效果在于:本实用新型采用了前阿克曼+后悬挂的结构形式,后悬挂车轮组通过轮毂电机带动小车移动,前阿克曼车轮机构通过转向舵机实现转向,其结构简单,适用性广,同时在前阿克曼车轮机构与车体之间设置有第一减震装置,后车轮与车体之间设置有第二减震装置,使得小车具有较好的抗震性。
附图说明
19.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新
型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1为本实用新型提供的一种前阿克曼后悬挂小车结构的外观示意图;
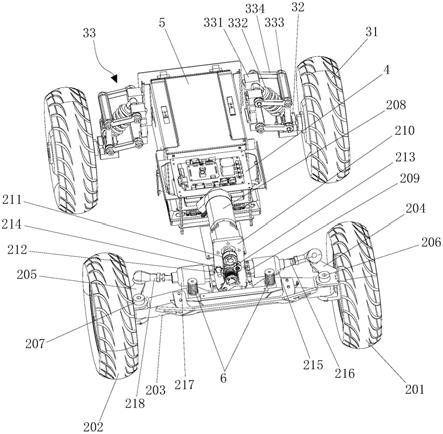
21.图2为本实用新型提供的一种前阿克曼后悬挂小车结构的结构示意图。
具体实施方式
22.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
23.为了说明本实用新型所述的技术方案,下面通过具体实施例来进行说明。
24.实施例
25.请参阅图1、图2,本实用新型实施例提供一种前阿克曼后悬挂小车结构,由车体1、前阿克曼车轮机构2、后悬挂车轮组3、无线控制系统4和电池5组成,前阿克曼车轮机构2、后悬挂车轮组3前后设置在车体1底部,后悬挂车轮组3通过轮毂电机32带动小车移动,前阿克曼车轮机构2通过转向舵机208实现转向,无线控制系统4、电池5设置在车体1底部且位于前阿克曼车轮机构2与后悬挂车轮组3之间,无线控制系统4分别与前阿克曼车轮机构2、后悬挂车轮组3信号连接,从而实现前阿克曼车轮机构2、后悬挂车轮组3的远程控制,电池5分别与前阿克曼车轮机构2、后悬挂车轮组3、无线控制系统4电性连接,为各部件提供电能,其中,所述电池5 为可拆卸,以便于更换。
26.具体的,前阿克曼车轮机构2包括左前轮201、右前轮202、连杆203、左阿克曼转向座204、右阿克曼转向座205、左转向轴206、右转向轴207、左驱动装置、右驱动装置、第一传动组件、转向舵机208、第一固定座209 和固定板210,左阿克曼转向座204、右阿克曼转向座205分别通过左转向轴206、右转向轴207转动设置在连杆203的左右两端,左前轮201与左阿克曼转向座204转动连接,右前轮202与右阿克曼转向座205转动连接,连杆203通过第一固定座209固定在车体1底部,左驱动装置、右驱动装置、第一传动组件、转向舵机208通过固定板210固定在第一固定座209 上,转向舵机208的驱动轴通过第一传动组件与左驱动装置、右驱动装置的输入端传动连接,左驱动装置、右驱动装置的输出端分别与左阿克曼转向座204、右阿克曼转向座205连接。
27.所述第一传动组件由主动齿轮211、从动齿轮212、传动带213、传动轴214和传动轮组成,转向舵机208的驱动轴连接主动齿轮211,主动齿轮 211通过传动带213与从动齿轮212传动连接,从动齿轮212与传动轮之间通过传动轴214连接,传动轮与左驱动装置、右驱动装置的输入端传动连接。
28.所述左驱动装置由第一装置壳体215、第二传动组件和第一摆杆216组成,第二传动组件设置在第一装置壳体215内,第一摆杆216的一端与左阿克曼转向座204连接,第一摆杆216的另一端通过球销与第一装置壳体 215转动连接,且与第二传动组件的一端传动连接,第二传动组件的另一端与传动轮传动连接。
29.所述右驱动装置由第二装置壳体217、第三传动组件和第二摆杆218组成,第三传动组件设置在第二装置壳体217内,第二摆杆218的一端与右阿克曼转向座205连接,第二摆杆218的另一端通过球销与第二装置壳体 217转动连接,且与第三传动组件的一端传动连
接,第三传动组件的另一端与传动轮传动连接。
30.前阿克曼车轮机构2的结构原理:无线控制系统4接收到信号后,控制转向舵机208启动,转向舵机208通过主动齿轮211带动从动齿轮212、传动轮旋转,再分别通过左驱动装置和右驱动装置带动左前轮201、右前轮 202实现转向。
31.所述连杆203与车体1之间设置有相称位于第一固定座209左右两侧的第一减震装置6。
32.具体的,后悬挂车轮组3由两个相互独立的悬挂车轮组件组成,两个悬挂车轮组件相称位于电池5的左右两侧,悬挂车轮组件由后车轮31、轮毂电机32和第二减震装置33组成,后车轮31与轮毂电机32的电机轴连接,轮毂电机32通过第二减震装置33固定在车体1底部。
33.后悬挂车轮组3的结构原理:无线控制系统4接收到信号后,控制轮毂电机32启动,轮毂电机32带动后车轮31运转实现小车的前后移动。
34.该小车结构采用了前阿克曼+后悬挂的结构形式,其结构简单,适用性广,同时在前阿克曼车轮机构2与车体1之间设置有第一减震装置6,后车轮31与车体1之间设置有第二减震装置33,使得小车具有较好的抗震性。
35.其中,所述第一减震装置6采用弹簧结构,所述第二减震装置33包括第二固定座331、弹簧332、活动板架333和四个第三摆杆334,轮毂电机 32设置在活动板架333的底端,四个第三摆杆334相称位于第二固定座331、活动板架333的前后两侧,且第三摆杆334的两端分别与第二固定座331、活动板架333枢转连接,弹簧332的一端与第二固定座331的顶端枢转连接,弹簧332的另一端与活动板架333的底端枢转连接。
36.以上仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1