一种氢能源功能底盘车的制作方法
1.本实用新型涉及车辆设备技术领域,具体是一种氢能源功能底盘车。
背景技术:
2.目前车辆在出售时,通常以指定用途作为目的进行出售,且出售时通常车辆以安装对应目的所需的车厢、车斗或其他设备,如果需要改变其使用目的,只能购买对应生产厂家生产的具备该使用目的的对应车辆,这虽然对车企的销售发展有促进作用,但对于使用企业来说,需要购置所需使用目的的多种车辆,一方面大幅度增加了企业的购置成本,同时后续车辆使用维护均为长期开销,这些都加重了使用企业的成本负担。
3.为此,发明人综合各类因素提出了一种氢能源功能底盘车。
技术实现要素:
4.本实用新型的目的在于提供一种氢能源功能底盘车,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种氢能源功能底盘车,包括车身底盘、无人驾驶系统、动力系统以及功能平台;所述无人驾驶系统包括定位模块、环境构建模块、路线决策规划模块、智能控制模块以及云控制系统;
7.动力系统包括氢燃料电池系统、动力电池系统以及电驱系统,氢燃料电池系统连接动力电池系统,动力电池系统连接电驱系统;
8.氢燃料电池系统包括氢燃料电池模块、供氢模块、供空气模块、冷却模块及压力及温度传感器;氢燃料电池模块与动力电池系统连接;
9.所述功能平台旋转安装于车身底盘上,功能平台上设有固定式机械臂;功能平台通过固定式机械臂固定安装上装设备形成具备上装设备功能的功能车。
10.作为本实用新型进一步技术方案:所述上装设备包括医疗救助站、货运仓、吊装机械臂,功能平台通过固定式机械臂择一固定安装上述上装设备后依次形成医疗救护车、货运车、吊装机械车。
11.作为本实用新型再进一步技术方案:所述定位模块包括gps定位模块以及北斗卫星定位模块。
12.作为本实用新型再进一步技术方案:所述环境构建模块包括激光雷达模块、毫米波雷达模块、高清全景摄像头模块以及超声波传感器。
13.作为本实用新型再进一步技术方案:所述路线决策规划模块包括地图路线规划模块和应急避障模块。
14.作为本实用新型再进一步技术方案:所述动力电池系统包括镍氢电池和锂离子电池。
15.作为本实用新型再进一步技术方案:动力电池系统还包括超级电容器,氢燃料电
池模块与超级电容器电连接。
16.作为本实用新型再进一步技术方案:所述电驱系统采用多轮驱动及控制,且能够实现双向行驶。
17.作为本实用新型的再进一步方案:所述功能平台上顶部均匀安装有固定件。
18.作为本实用新型的再进一步方案:所述固定件包括支撑座、支撑台和固定座,支撑座固定于功能平台上,支撑台与支撑座相固定,相邻的支撑台之间形成间隔腔,固定座位于相邻支撑台之间,固定座底部固定有位于间隔腔内的连接管,间隔腔下方位置设有两端分别与对应位置的支撑台底部错位相抵的固定板,固定板与连接管之间由紧固螺栓螺纹连接,固定时使用螺栓将固定座与车厢、车斗或相关设备进行固定,同时由紧固螺栓将固定座牢牢固定于支撑台与支撑座上,多个固定件的设置方便了不同形状、尺寸、规格设备的固定。
19.作为本实用新型的再进一步方案:所述连接管底部位置一体成型连接有凸齿,固定板上焊接固定有与凸齿对应的卡齿,固定板与连接管相抵固定时,凸齿与卡齿相错位限位,从而避免固定件在功能平台上出现整体滑动的情况,大大增加了固定稳定性。
20.与现有技术相比,本实用新型具有以下几个方面的有益效果:
21.本实用新型涉及一种氢能源功能底盘车,具体包括车身底盘、无人驾驶系统、动力系统、功能平台等构成。动力系统包括氢燃料电池系统及动力电池系统,其中动力电池系统由镍氢电池或锂离子电池构成;定位模块、环境构建模块、路线决策规划模块、智能控制模块以及云控制系统,所述定位模块包括gps定位模块以及北斗卫星定位模块,所述环境构建模块包括激光雷达模块、毫米波雷达模块、高清全景摄像头模块以及超声波传感器;所述路线决策规划模块包括地图路线规划模块和应急避障模块;实现高精度安全无人驾驶;
22.本实用新型进一步功能平台位于车身底盘上,可以360度内多角度旋转,功能平台上设有固定式机械臂,可以固定多种型号的上装设备,如医疗救助站、货运仓、吊装机械臂等,上装各种平台后,可以变成医疗救护车、货运车、吊装机械车等;
23.本实用新型进一步车身底盘上可以设有大型的超级电容器及氢气储存装置,一次加氢后可以变身为动力牵引车、移动充电车等,车身底盘采用多轮驱动及控制,可以实现双向行驶,机动性强、极大的提高了运行效率,满足多种场景下的应用需求。
附图说明
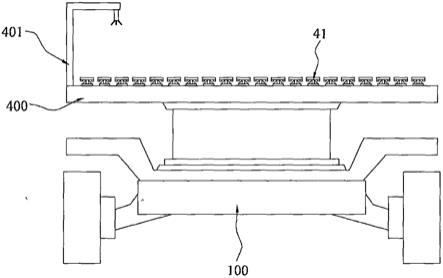
24.图1为一种氢能源功能底盘车的正视图。
25.图2为一种氢能源功能底盘车中固定件的结构示意图。
26.图3为一种氢能源功能底盘车中固定件的局部放大图。
27.图4为一种氢能源功能底盘车中无人驾驶系统的系统模块化框图。
28.图5为一种氢能源功能底盘车中动力系统的系统模块化框图。
29.图6为一种氢能源功能底盘车中氢燃料电池系统的系统模块化框图。
具体实施方式
30.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
31.实施例一:请参阅图1-6,一种氢能源功能底盘车,包括车身底盘100、无人驾驶系
统200、动力系统300以及功能平台400;所述无人驾驶系统200包括定位模块210、环境构建模块220、路线决策规划模块230、智能控制模块240 以及云控制系统250;动力系统300包括氢燃料电池系统310、动力电池系统320 以及电驱系统330,氢燃料电池系统310连接动力电池系统320,动力电池系统 320连接电驱系统330;所述功能平台400旋转安装于车身底盘100上,功能平台400上设有固定式机械臂401;功能平台400通过固定式机械臂401固定安装上装设备形成具备上装设备功能的功能车。
32.所述定位模块210包括gps定位模块以及北斗卫星定位模块。所述环境构建模块220包括激光雷达模块221、毫米波雷达模块222、高清全景摄像头模块223 以及超声波传感器224。其中动力电池系统320由镍氢电池或锂离子电池构成。氢燃料电池系统310包括氢燃料电池模块311、供氢模块312、供空气模块313、冷却模块314及压力及温度传感器315;氢燃料电池模块311与动力电池系统320 连接。
33.动力电池系统320还包括超级电容器,氢燃料电池模块311与超级电容器电连接。所述电驱系统330采用多轮驱动及控制,且能够实现双向行驶。所述上装设备包括医疗救助站、货运仓以及吊装机械臂,功能平台400通过固定式机械臂 401择一固定安装上述上装设备后依次形成医疗救护车、货运车、吊装机械车。本实施例中上装设备为医疗救助站形成医疗救护车。
34.实施例二:本实施例在实施例一的基础上增加了如下技术特征:
35.功能平台400上顶部均匀安装有固定件41,固定件41包括支撑座411、支撑台412、固定座413、连接管414、固定板415和紧固螺栓416,支撑座411 通过螺栓固定于功能平台4上,支撑台412与支撑座411相焊接固定,相邻的支撑台412之间形成间隔腔417,固定座413位于相邻支撑台412之间,连接管414 位于间隔腔417内且与固定座413相焊接固定,固定板415位于间隔腔417下方位置且两端分别与对应位置的支撑台412底部错位相抵,固定板415与连接管 414之间由紧固螺栓416螺纹连接,连接管414底部位置一体成型连接有凸齿 418,固定板415上焊接固定有与凸齿418对应的卡齿419;
36.本实用新型的工作原理是:本实用新型涉及一种氢能源功能底盘车,具体包括车身底盘、无人驾驶系统、动力系统、功能平台等构成。动力系统包括氢燃料电池系统及动力电池系统,其中动力电池系统由镍氢电池或锂离子电池构成;无人控制系统由定位定向模块、分析决策模块、数据处理模块、人机交互模块、环境构建模块、跟踪巡查模块等组成,并涵盖gps定位、激光雷达、毫米波雷达、高清全景摄像头、超声波传感器等功能构件,完成路况环境识别及跟踪、巡查等功能;
37.功能平台位于车身底盘上,可以360度内多角度旋转,功能平台上设有固定式机械臂,可以固定多种型号的上装设备,如医疗救助站、货运仓、吊装机械臂等,上装各种平台后,可以变成医疗救护车、货运车、吊装机械车等;车身底盘上设有大型的超级电容器及氢气储存装置,一次加氢后可以变身为动力牵引车、移动充电车等,车身底盘采用多轮驱动及控制,可以实现双向行驶,机动性强、极大的提高了运行效率,满足多种场景下的应用需求。
38.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上
述术语在本实用新型中的具体含义。
39.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1