一种电刷式新能源汽车自动充电装置的制作方法
1.本实用新型涉及新能源汽车充电技术领域,特指一种电刷式新能源汽车自动充电装置。
背景技术:
2.随着新能源汽车的高速发展,充电桩的全面建设迫不容缓。传统的新能源汽车充电一般采用手工充电的方式,需要将汽车开到指定位置后,人员下车手动打开汽车充电口并将充电接头手动插入,再接通电源,操作复杂,且离开时很容易忘记拔下充电接头,直接发动汽车,对汽车充电口及充电设备造成损害,更有可能造成人员受伤。
3.目前市场上也出现了新能源汽车自动充电装置,如现有技术201510235350.0公开的一种电动汽车自动充电系统,现有技术201610124284.4公开的一种新能源汽车充电装置,现有技术201820608154.2公开的一种移动式充电桩及充电桩系统,现有技术201922144852.9公开的一种新能源汽车全自动安全充电桩,现有技术202011133919.x公开的一种电动汽车的充电机械臂和自动化智能充电装置,现有技术虽然能对种新能源汽车自动充电,但存在以下问题:1、现有技术均将充电头设置在机械臂上,导致一次只能对一辆新能源汽车进行充电,充电效率低,如果需要同时对多辆新能源汽车进行充电,则需要多个机械臂,不仅大大增加了制造成本,且增加了控制难度;2、现有技术在充电前或充电后,需要人为的打开或关闭充电盖,自动化程度低;再如现有技术202010557439.x公开的一种用户侧新能源汽车储能充电站,通过在机器臂上设置夹具,虽然能夹取充电头进行自动插拔,但存在以下问题:1、协作自动小车与多自由度机械臂的分级运动控制与协同作业配合时,由于不同型号的新能源汽车的大小不同,且每个人的停车位置不同,大大增加了协作自动小车的控制难度;2、现有技术在充电前或充电后,还是需要人为的打开或关闭充电盖,自动化程度低。
技术实现要素:
4.本实用新型目的是为了克服现有技术的不足而提供一种电刷式新能源汽车自动充电装置。
5.为达到上述目的,本实用新型采用的技术方案是:一种电刷式新能源汽车自动充电装置,包含多个并排放置的停车区域、多个设置在相邻停车区域之间的充电枪支架、多个设置在充电枪支架上的充电枪、分别设置在停车区域后方的移动机器人和电刷供电系统;
6.所述移动机器人包括设置在多个停车区域后方的x轴伺服模组、设置在x轴伺服模组驱动端且与x轴伺服模组垂直放置的y轴伺服模组、设置在y轴伺服模组驱动端的多自由度机器臂;所述多自由度机器臂的驱动端分别设置有电动夹爪、视觉传感器和开关盖手指;
7.所述电刷供电系统用于给移动机器人供电。
8.优选的,所述视觉传感器包括一个初定位相机和二个精定位相机;所述初定位相机用于拍照获取新能源汽车上充电盖的位置;二个所述精定位相机用于拍照获取充电盖内
充电口的位置。
9.优选的,所述多自由度机器臂的驱动端设置有用于检测充电枪插入深度的激光位移传感器。
10.优选的,所述电动夹爪和开关盖手指分别朝外倾斜设置在多自由度机器臂驱动端的两侧;所述视觉传感器和激光位移传感器设置在电动夹爪和开关盖手指之间。
11.优选的,所述x轴伺服模组包括两条平行设置在多个停车区域后方的x轴导轨、滑动设置在x轴导轨上的x轴移动台、用于驱动x轴移动台沿x轴导轨移动的驱动机构。
12.优选的,所述电刷供电系统包括设置在两条x轴导轨之间且与x轴导轨平行放置的电轨、设置在x轴移动台底部且与电轨始终接触的电刷。
13.优选的,所述电刷为滚轮结构,与电轨滚动接触。
14.优选的,所述驱动机构包括水平固定设置且与x轴导轨平行放置的同步带、竖直设置在x轴移动台一侧且与x轴导轨平行放置的安装板、水平设置在安装板上且与x轴导轨垂直放置的x轴伺服电机、设置在伺服电机驱动端的主动轮、两个转动设置在安装板上且分别位于主动轮上方两侧的导向轮;所述同步带分别绕过主动轮底部和两个导向轮顶部。
15.优选的,所述驱动机构还包括设置在安装板上的防护罩;所述主动轮和两个导向轮均位于防护罩内。
16.优选的,所述y轴伺服模组包括设置在x轴移动台上且与x轴导轨垂直放置的底座、水平设置在底座上且与x轴导轨垂直放置的丝杆、设置在底座一端用于驱动丝杆转动的y轴伺服电机、两根设置在底座上且分别位于丝杆两侧的y轴导轨、滑动设置在两根y轴导轨上且可伸出底座的y轴移动台、设置在y轴移动台底部内端且与丝杆螺纹连接的螺母;所述多自由度机器臂设置在y轴移动台的顶部外端。
17.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:
18.1、本实用新型通过x轴伺服模组、y轴伺服模组、多自由度机器臂和电动夹爪,能分别夹取多个充电枪给多辆汽车进行充电,不仅大大提高了充电效率,且能够避免用户肢体与充电设备的直接接触,可以防止触电隐患,具有一定的安全性;
19.2、本实用新型通过x轴伺服模组、y轴伺服模组、多自由度机器臂和开关盖手指,能自动打开或关闭充电盖,自动化程度高;
20.3、本实用新型通过将充电枪设置在相邻停车区域之间,不仅能给相邻停车区域的新能源汽车进行充电,且能大大缩短充电枪与新能源汽车充电口的距离,节省插拔时间。
21.4、本实用新型通过电刷供电系统给移动机器人供电,具有结构简单、维护方便且故障率低等优点。
附图说明
22.下面结合附图对本实用新型技术方案作进一步说明:
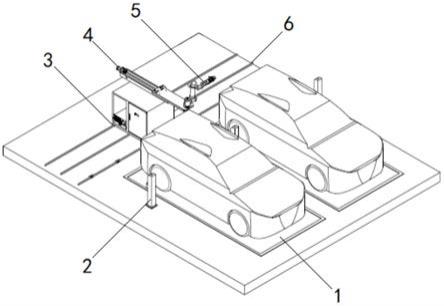
23.附图1为本实用新型所述的电刷式新能源汽车自动充电装置的结构示意图;
24.附图2为本实用新型中移动机器人的结构示意图;
25.附图3为本实用新型中六轴机器臂的结构示意图;
26.附图4为图2中a处局部放大图;
27.附图5为本实用新型中驱动机构的结构示意图;
28.附图6为本实用新型中充电枪支架和充电枪的结构示意图。
29.其中:1、停车区域;2、充电枪支架;3、x轴伺服模组;31、x轴导轨;32、x轴移动台;33、驱动机构;331、同步带;332、安装板;333、x轴伺服电机;334、主动轮;335、导向轮;336、防护罩;4、y轴伺服模组;41、底座;42、丝杆;43、y轴伺服电机;44、y轴导轨;45、y轴移动台;5、六轴机器臂;51、电动夹爪;52、精定位相机;53、激光位移传感器;54、初定位相机;55、开关盖手指;6、电轨;7、充电枪。
具体实施方式
30.下面结合附图及具体实施例对本实用新型作进一步的详细说明。
31.附图1-6为本实用新型所述的电刷式新能源汽车自动充电装置,包含多个并排放置的停车区域1、多个设置在相邻停车区域1之间的充电枪支架2、多个设置在充电枪支架2上的充电枪7、分别设置在停车区域1后方的移动机器人和电刷供电系统;
32.所述移动机器人包括设置在多个停车区域1后方的x轴伺服模组3、设置在x轴伺服模组3驱动端且与x轴伺服模组3垂直放置的y轴伺服模组4、设置在y轴伺服模组4驱动端的六轴机器臂5;所述六轴机器臂5的驱动端分别设置有电动夹爪51、视觉传感器和开关盖手指55;
33.所述电刷供电系统用于给移动机器人供电。
34.工作时:驾驶员将新能源汽车开入停车区域1内,通过手机app给云服务器发送充电信息,当电控箱收到云服务器的开始充电信号后,先通过x轴伺服模组3驱动y轴伺服模组4到达新能源汽车充电口的一侧,再通过y轴伺服模组4驱动六轴机器臂5到达新能源汽车充电口一侧的充电盖旁边,然后通过六轴机器臂5驱动开关盖手指55拨开充电盖,最后通过六轴机器臂5驱动电动夹爪51夹取充电枪7插入新能源汽车充电口,给新能源汽车进行充电;当充电完成后,电控箱发送充电结束信号到云服务器,云服务器再将充电结束信号发生到驾驶员的手机app,同时通过六轴机器臂5驱动电动夹爪51夹取充电枪7从新能源汽车充电口拔出,并置于充电枪支架2上,再通过六轴机器臂5驱动开关盖手指55关闭充电盖,最后驾驶员将新能源汽车开出停车区域1。
35.进一步,所述视觉传感器包括一个初定位相机54和二个精定位相机52;所述初定位相机54用于拍照获取新能源汽车上充电盖的位置;二个所述精定位相机52用于拍照获取充电盖内充电口的位置;当六轴机器臂5在驱动开关盖手指55拨开充电盖时,可通过初定位相机54拍照获取新能源汽车上充电盖的位置,便于开关盖手指55精准拨开充电盖;当六轴机器臂5将充电枪7插入新能源汽车充电口时,可通过二个精定位相机52拍照获取充电盖内充电口的位置,便于充电枪7精准插入充电口内。
36.进一步,所述六轴机器臂5的驱动端设置有用于检测充电枪7插入深度的激光位移传感器53;工作时:通过激光位移传感器53能对充电枪7的插入深度二次确认,保证充电枪7与充电口充分接触。
37.进一步,所述电动夹爪51和开关盖手指55分别朝外倾斜设置在六轴机器臂5驱动端的两侧;所述视觉传感器和激光位移传感器53设置在电动夹爪51和开关盖手指55之间;工作时:通过将电动夹爪51和开关盖手指55分别朝外倾斜设置在六轴机器臂5驱动端的两侧,避免电动夹爪51夹取充电枪7时,充电枪7与开关盖手指55发生干涉,或者开关盖手指55
拨开充电盖时,电动夹爪51与充电盖发生干涉。
38.进一步,所述x轴伺服模组3包括两条平行设置在多个停车区域1后方的x轴导轨31、滑动设置在x轴导轨31上的x轴移动台32、用于驱动x轴移动台32沿x轴导轨31移动的驱动机构33;工作时:通过驱动机构33能驱动x轴移动台32沿两条x轴导轨31移动,带动y轴伺服模组4和多自由度机器臂移动到新能源汽车充电口的一侧进行充电。
39.进一步,所述电刷供电系统包括设置在两条x轴导轨31之间且与x轴导轨31平行放置的电轨6、设置在x轴移动台32底部且与电轨6始终接触的电刷;所述电刷具有良好的导电、导热以及润滑性能,并具有一定的机械强度和抑制换向性火花的特性;驱动机构33在驱动x轴移动台32移动时:由于电轨6与电源连接,而电刷始终与电轨6接触,所以能给移动过程中的移动机器人进行供电,具有结构简单、维护方便且故障率低等优点。
40.进一步,所述电刷为滚轮结构,与电轨6滚动接触,减少磨损,提高使用寿命。
41.进一步,所述驱动机构33包括水平固定设置且与x轴导轨31平行放置的同步带331、竖直设置在x轴移动台32一侧且与x轴导轨31平行放置的安装板332、水平设置在安装板332上且与x轴导轨31垂直放置的x轴伺服电机333、设置在伺服电机驱动端的主动轮334、两个转动设置在安装板332上且分别位于主动轮334上方两侧的导向轮335;所述同步带331分别绕过主动轮334底部和两个导向轮335顶部;工作时:由于同步带331水平固定设置,当x轴伺服电机333驱动主动轮334转动时,在反作用力下,能驱动x轴移动台32沿两条x轴导轨31移动,具有结构简单紧凑、维护方便、成本低等优点。
42.进一步,所述驱动机构33还包括设置在安装板332上的防护罩336;所述主动轮334和两个导向轮335均位于防护罩336内,起到保护作用。
43.进一步,所述y轴伺服模组4包括设置在x轴移动台32上且与x轴导轨31垂直放置的底座41、水平设置在底座41上且与x轴导轨31垂直放置的丝杆42、设置在底座41一端用于驱动丝杆42转动的y轴伺服电机43、两根设置在底座41上且分别位于丝杆42两侧的y轴导轨44、滑动设置在两根y轴导轨44上且可伸出底座41的y轴移动台45、设置在y轴移动台45底部内端且与丝杆42螺纹连接的螺母;所述六轴机器臂5设置在y轴移动台45的顶部外端;工作时:y轴伺服电机43驱动丝杆42转动,由于螺母与丝杆42螺纹连接,从而驱动y轴移动台45沿两条y轴导轨44移动,调整六轴机器臂5的位置;同时y轴移动台45可伸出底座41,能大大延长六轴机器臂5的行程,增加工作范围。
44.以上仅是本实用新型的具体应用范例,对本实用新型的保护范围不构成任何限制。凡采用等同变换或者等效替换而形成的技术方案,均落在本实用新型权利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1