用于臂架的图像采集装置及臂架防碰撞系统的制作方法
1.本实用新型涉及工程机械领域,具体地涉及一种用于臂架的图像采集装置以及一种臂架防碰撞系统。
背景技术:
2.混凝土泵车是输送混凝土的施工设备,在进行混凝土浇筑作业时,通常需要操控机手在浇筑点附近观察浇筑现场情况。在混凝土泵车臂架末端的软管即将碰撞到周围的人或障碍物时,操作远程遥控器向下位机控制器下发停臂,控制臂架运动,避免臂架在发生外物碰撞时对臂架产生外载引发安全事故。在上述过程中对臂架碰撞障碍物的预判基于操控机手的经验,容易产生误判或误操作导致安全事故。
3.目前,针对臂架防碰撞主要是采用在臂架上安装传感器进行空间感知或臂架姿态感知来实现,但这种感知方式不能实现对臂架末端障碍物的实时检测。
技术实现要素:
4.本实用新型实施例的目的是提供一种用于臂架的图像采集装置来采集臂架周围的图像信息,以实现对臂架末端障碍物的实时检测。
5.为了实现上述目的,本实用新型实施例提供一种用于臂架的图像采集装置,包括至少一组双目相机,以及用于安装所述双目相机的支架组件,所述支架组件安装于所述臂架的末端。
6.可选的,所述支架组件包括环形扣件和活动组件,所述环形扣件扣装于所述臂架的末端,所述双目相机通过所述活动组件安装。
7.可选的,所述支架组件还包括悬臂,所述活动组件通过所述悬臂与所述环形扣件连接。
8.可选的,所述活动组件包括第一连接件和第二连接件,所述第一连接件与所述第二连接件铰接连接。
9.可选的,所述活动组件还包括安装板,所述安装板与所述第二连接件连接,所述双目相机安装于所述安装板。
10.可选的,所述双目相机有四组,四组所述双目相机分别通过四组所述活动组件安装于所述环形扣件的四周。
11.可选的,所述支架组件包括活动组件,所述活动组件用于调节所述双目相机相对于所述臂架的倾斜角度,使得所述双目相机的垂直视场角投影的一边缘与所述臂架的末端边缘重合。
12.可选的,所述活动组件包括第一连接板和第二连接板,所述第二连接板与所述第一连接板铰接连接,所述双目相机安装于所述第二连接板。
13.可选的,安装于所述第二连接板的不同的双目相机相对于所述臂架的倾斜角度为50
°‑
80
°
。
14.可选的,所述第二连接板上设置有多个刻度值,所述刻度值用于标示所述第二连接板沿所述铰接点转动时所述双目相机相对于所述臂架的倾斜角度。
15.可选的,所述支架组件还包括环形扣件,所述第一连接板与所述环形扣件连接,所述环形扣件通过定位销固定安装于所述臂架。
16.可选的,所述双目相机的外周安装有镂空的防护架。
17.另一方面,本实用新型还提供一种臂架防碰撞系统,包括上述的用于臂架的图像采集装置。
18.本实用新型实施例提供的用于臂架的图像采集装置,通过双目相机实时采集以臂架末端为中心的空间范围内的深度图像数据,以根据深度图像数据确定臂架周围障碍物的位置信息,从而实现对臂架末端障碍物的实时检测。
19.此外,本实用新型的用于臂架的图像采集装置,可通过活动组件调节双目相机相对于臂架的倾斜角度,使得双目相机的垂直视场角投影的一边缘与臂架的末端边缘重合,以得到最大的拍摄覆盖范围,通过四组双目相机采集深度图像数据,可为臂架防碰撞系统提供精确的图像数据,有利于精准地确定障碍物的位置以确定避障策略。
20.本实用新型实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
21.附图是用来提供对本实用新型实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本实用新型实施例,但并不构成对本实用新型实施例的限制。在附图中:
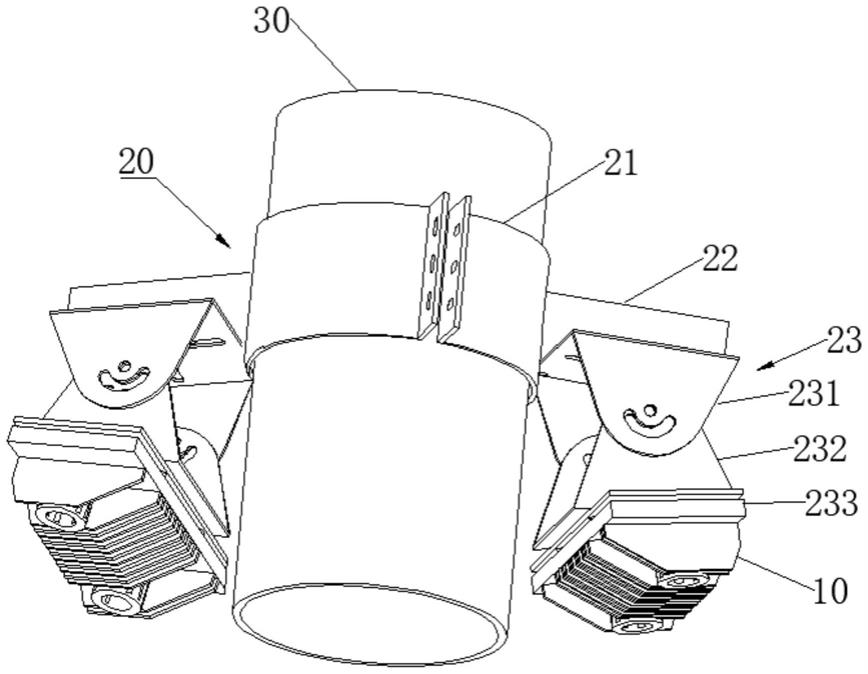
22.图1是本实用新型实施例一提供的用于臂架的图像采集装置的结构示意图;
23.图2是本实用新型实施例一提供的用于臂架的图像采集装置的安装位置示意图(侧视图);
24.图3是本实用新型实施例一提供的用于臂架的图像采集装置的安装位置示意图(俯视图);
25.图4是本实用新型实施例一提供的用于臂架的图像采集装置的双目相机的拍摄方向示意图;
26.图5是本实用新型实施例二提供的用于臂架的图像采集装置的安装位置示意图;
27.图6是本实用新型实施例二提供的用于臂架的图像采集装置的支架组件的结构示意图;
28.图7是本实用新型实施例二提供的用于臂架的图像采集装置的双目相机倾斜安装示意图。
29.附图标记说明
30.10-双目相机,20-支架组件,21-环形扣件,22-悬臂,
31.23-活动组件,231-第一连接件,232-第二连接件,233-安装板,
32.234-第一连接板,235-第二连接板,30-臂架,40-砼管,50-地面。
具体实施方式
33.以下结合附图对本实用新型实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型实施例,并不用于限制本实用新型实施例。
34.本文中的术语“第一”、“第二”仅用于区分描述,而不能理解为指示或暗示相对重要性。本文所述的“连接”可以是两个部件的直接连接,也可以是通过第三个部件实现的间接连接。
35.实施例一
36.图1是本实用新型实施例一提供的用于臂架的图像采集装置的结构示意图。如图1所示,本实施例提供的用于臂架的图像采集装置,包括至少一组双目相机10以及用于安装双目相机10的支架组件20,所述支架组件20安装于臂架30的末端。所述支架组件20包括环形扣件21、活动组件23以及悬臂22,所述活动组件23通过所述悬臂22与所述环形扣件21连接,所述环形扣件21扣装于所述臂架30的末端,所述双目相机10通过所述活动组件23安装。本实施例中,所述环形扣件21为抱箍,以便于整体安装或拆卸支架组件20。所述活动组件23包括第一连接件231、第二连接件232以及安装板233,所述第一连接件231与所述第二连接件232铰接连接,所述安装板233与所述第二连接件232连接,所述双目相机10安装于所述安装板233。
37.本实施例中,所述双目相机10有四组(图1仅展示出两组),四组所述双目相机10分别通过四组所述活动组件23安装于所述环形扣件21的四周。通过调节所述活动组件23的第二连接件232与第一连接件231的相对位置,能够使所述双目相机10的朝向相对于地面倾斜。具体的,通过调整第一连接件231与第二连接件232之间夹角的角度,来调整双目相机10的拍摄方向。
38.图2是本实用新型实施例一提供的用于臂架的图像采集装置的安装位置示意图(侧视图);
39.图3是本实用新型实施例一提供的用于臂架的图像采集装置的安装位置示意图(俯视图);
40.图4是本实用新型实施例一提供的用于臂架的图像采集装置的双目相机的拍摄方向示意图。
41.如图2至图4所示,本实施例以混凝土泵车为例,混凝土泵车的臂架30末端连接有用于输送混凝土的砼管40。本实施例提供的用于臂架的图像采集装置包括四组双目相机10,四组双目相机10通过一个支架组件20安装到臂架30末端的砼管40外壁上,四组双目相机10围绕臂架30末端的砼管40呈阵列分布,通过四组双目相机10可以更精确地采集臂架30周围的图像信息。为保证双目相机10的拍摄视角可覆盖到以臂架30末端的砼管40为中心的空间范围,四组双目相机10的朝向(拍摄方向)相对于地面50倾斜,四组双目相机10的拍摄视角覆盖范围如图3所示。优选的,所述双目相机10的朝向相对于地面倾斜50
°‑
80
°
时,其拍摄视角可覆盖到以砼管40为中心的合适空间范围,保证双目相机10拍摄到臂架周围障碍空间的图像信息。
42.实施例二
43.图5是本实用新型实施例二提供的用于臂架的图像采集装置的安装位置示意图。
44.图6是本实用新型实施例二提供的用于臂架的图像采集装置的支架组件的结构示意图。
45.如图5和图6所示,本实施例提供的用于臂架的图像采集装置,包括至少一组双目相机10以及用于安装双目相机10的支架组件20,支架组件20安装于臂架30的末端(靠近砼管的位置)。支架组件20包括环形扣件21和活动组件,环形扣件21扣装于臂架30的外壁。所述活动组件用于调节双目相机10相对于臂架30的倾斜角度。具体的,所述活动组件包括第一连接板234和第二连接板235,第二连接板235与第一连接板234铰接连接,第一连接板234与环形扣件21连接,双目相机10通过安装板233安装于第二连接板235。第二连接板235能够沿第二连接板235与第一连接板234之间的铰接点转动,以调节双目相机10相对于臂架30的倾斜角度,使得双目相机10的垂直视场角投影的一边缘与臂架30的末端边缘重合。第二连接板235上设置有多个刻度值,所述刻度值用于标示第二连接板235沿铰接点转动时双目相机10相对于臂架30的倾斜角度。操作人员通过观察第二连接板235上的刻度值,可准确地调整双目相机10相对于臂架30的倾斜角度,从而调整双目相机10的朝向和拍摄视角。
46.优选的,所述环形扣件21通过定位销固定安装于臂架30,其中定位销孔安装在臂架30上,定位销孔与臂架30相对固定,定位销头安装在环形扣件21上,从而保证安装在支架组件20上的双目相机10相对臂架30的位置固定,以利于双目相机10的位置标定。
47.优选的,所述双目相机10的外周安装有镂空的防护架。通过防护架,减少臂架运动时与其它部件干涉导致的冲击和碰撞。防护架采用在相机的非镜头侧环绕相机的方案,为保证相机工作时的散热及相机数据电源线缆的部署,防护架采用镂空的形式。防护架安装在相机固定结构件上,防护架安装孔位设计在相机安装孔位的外围,由于防护架采用镂空的形式,因此防护架不会对相机拆卸造成干扰,可保证相机后期的正常使用维护
48.图7是本实用新型实施例二提供的用于臂架的图像采集装置的双目相机倾斜安装示意图。双目相机10安装在臂架30末端的砼管上,双目相机10位于砼管的上方,沿第二连接板235与第一连接板234之间的铰接点转动第二连接板235,可以调节双目相机10相对于臂架30的倾斜角度。如图7所示,调节双目相机相对于臂架的倾斜角度α,使相机的垂直视场角投影的一边缘与臂架的末端边缘重合(相机的垂直视场角投影的一边缘经过臂架末端的砼管的边缘),此时相机的拍摄视角的覆盖盲区在地面的投影最小。当相机的拍摄视角的覆盖盲区在地面的投影最小时,相机的倾斜角度α与相机的垂直视场角ε相关,倾斜角度α=90
°
-垂直视场角ε/2+θ,其中θ与相机的尺寸以及安装相机的支架组件的尺寸相关,通常θ为0
°‑
10
°
。若要使相机的拍摄视角的覆盖盲区在地面的投影最小,对于垂直视场角ε较大的相机,应调小相机的倾斜角度α,对于垂直视场角ε较小的相机,应调大相机的倾斜角度α,以得到最大的拍摄覆盖范围。由于不同规则的双目相机的垂直视场角不同,而对于某一规则的双目相机其垂直视场角是确定的,在相机的垂直视场角确定的情况下可计算出该相机的倾斜角度。针对几种垂直视场角不同的双目相机,计算出不同的双目相机对应的倾斜角度的范围为50
°‑
80
°
。
49.本实用新型实施例提供的用于臂架的图像采集装置,通过双目相机10实时采集以臂架30末端为中心的空间范围内的深度图像数据,以根据深度图像数据确定臂架30周围障碍物的位置信息,从而实现对臂架30末端障碍物的实时检测。另一方面,本实用新型的用于臂架的图像采集装置,可通过活动组件调节双目相机相对于臂架的倾斜角度,使得双目相
机的垂直视场角投影的一边缘与臂架的末端边缘重合,以得到最大的拍摄覆盖范围,通过四组双目相机10采集深度图像数据,可为臂架防碰撞系统提供精确的图像数据,有利于精准地确定障碍物的位置以确定避障策略。
50.本实用新型实施方式还提供一种臂架防碰撞系统,包括上述的用于臂架的图像采集装置。所述臂架防碰撞系统通过上述图像采集装置采集臂架周围的图像信息,根据图像信息确定臂架周围的障碍物的位置信息,基于障碍物的位置信息和臂架的当前运动方向确定避障方向,实现臂架主动避让障碍物运动控制功能。
51.以上结合附图详细描述了本实用新型实施例的可选实施方式,但是,本实用新型实施例并不限于上述实施方式中的具体细节,在本实用新型实施例的技术构思范围内,可以对本实用新型实施例的技术方案进行多种简单变型,这些简单变型均属于本实用新型实施例的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1