模块化自动驾驶系统以及自动驾驶车辆的制作方法
1.本实用新型涉及无人驾驶技术领域,尤其涉及一种模块化自动驾驶系统以及自动驾驶车辆。
背景技术:
2.随着计算机技术和通信技术的快速发展,无人驾驶技术得到了广泛的研究和发展。现有技术中,自动驾驶系统的结构通常如图1所示,包括:计算单元、传感单元、控制单元和外围设备单元,其中计算单元包括处理器、存储器等,传感单元包括定位装置、雷达装置、视频采集装置等,控制单元包括转向、制动、油门等的控制,外围设备单元包括通信装置、显示器、扬声器、麦克风等。使用时,车辆通过获取gnss、雷达、摄像头、移动通信等设备的数据传输至计算单元,计算单元经过处理分析后控制车辆转向、制动、油门等设备,并对车辆信息进行显示或提示。
3.尽管现有技术能够实现自动驾驶的功能,然而,多个设备直接与计算单元相连接,计算单元的处理其数据处理量巨大。车辆速度越快,为了保证驾驶的安全,采集的信息就要越多,计算单元需要处理的信息就越多,计算单元的负载也就越大。在此种情况下,较大负载的计算单元,极易产生数据的延迟,系统稳定性不高,并且信息的实时性不能保证,这对自动驾驶而言,容易导致严重的交通事故和安全隐患。
技术实现要素:
4.本实用新型的目的是提供一种模块化自动驾驶系统以及自动驾驶车辆,以满足对较大负载的数据处理需求。
5.为实现本实用新型的目的,本实用新型提供的具体技术方案如下:
6.第一方面,
7.本实用新型提供一种模块化自动驾驶系统,包括:组合导航单元、感知单元、计算单元以及底层控制单元;
8.所述组合导航单元,连接定位传感器,用于接收定位传感器采集的定位数据,输出融合定位结果;
9.所述感知单元,连接前端传感器,用于接收前端传感器采集的感知数据,输出障碍物的时空信息;
10.所述计算单元,连接所述组合导航单元、感知单元,用于接收所述融合定位结果、所述障碍物的时空信息、高精地图数据以及驾驶任务,输出决策规划信号;
11.所述底层控制单元,连接所述计算单元、底层设备传感器和底层设备控制器,用于接收所述决策规划信号以及所述底层设备传感器采集的车身状态信息,向底层设备控制器输出设备控制信号。
12.在一些实施例中,所述组合导航单元采用fpga芯片或实时mcu芯片。
13.在一些实施例中,所述组合导航单元通过rs422总线连接所述计算单元。
14.在一些实施例中,所述前端传感器包括激光雷达、摄像头、超声波雷达、毫米波雷达中的至少一种;所述感知单元通过车载以太网与激光雷达连接,通过同轴线缆与摄像头连接,通过lin总线与超声波雷达连接,通过can总线与毫米波雷达连接。
15.在一些实施例中,所述感知单元采用英伟达芯片或soc芯片。
16.在一些实施例中,所述计算单元采用英伟达芯片。
17.在一些实施例中,所述感知单元通过高速pcie总线或高速以太网连接所述计算单元。
18.在一些实施例中,所述底层控制单元通过can总线连接底层设备传感器和底层设备控制器。
19.在一些实施例中,所述底层控制单元采用英飞凌功能安全芯片tc29x/tc39x系列。
20.第二方面,
21.与上述系统相对应地,本实用新型还提供了一种自动驾驶车辆,所述车辆采用上述的任一项模块化自动驾驶系统。
22.与现有技术相比,本实用新型的有益效果为:
23.本实用新型提供了一种模块化平台化的自动驾驶系统硬件结构,将负载的系统模块化,各自独立分工,实时处理各自的信息,提高了系统的可靠性,降低了自动驾驶数据处理时延,达到实时、可靠实现自动驾驶的目的。
附图说明
24.图1为现有技术中自动驾驶系统的系统结构示意图;
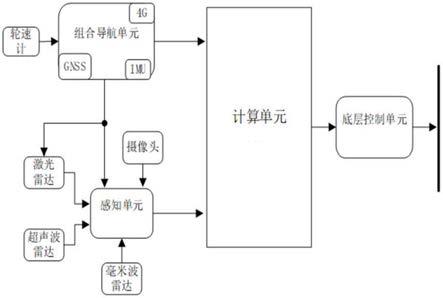
25.图2为本技术提供的自动驾驶系统的实施例结构示意图。
具体实施方式
26.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
27.本实用新型创新之处在于提供了一种模块化的自动驾驶系统硬件结构。将自动驾驶系统设计为四个通过连接结构相连接的单元,具体为:组合导航单元、感知单元、计算单元以及底层控制单元,四个单元均能够分别对数据进行处理,从而能够分担计算单元的负载,使得负载尽量均衡,进而能够提高硬件系统的运行可靠性,有效降低自动驾驶数据处理时延,从而达到实时、可靠实现自动驾驶的目的。
28.实施例1
29.如图2所示,为本技术提供的一种模块化自动驾驶系统的实施例结构。
30.具体地,本实施例包括组合导航单元、感知单元、计算单元以及底层控制单元。感知单元与计算单元、组合导航单元连接,组合导航单元与计算单元连接,底层控制单元与计算单元连接。
31.其中,组合导航单元,连接定位传感器,用于接收定位传感器采集的定位数据,输出融合定位结果。
32.定位传感器包括惯性测量单元imu、全球导航卫星系统gnss、轮速计中的一种或多种。
33.组合导航单元还可以连接4g通信模块等。当然,4g通信模块还可替换为5g通信模块或者其他通信模块。
34.可选的,组合导航单元还可以产生基准时间信号,同步到各激光雷达、感知单元、计算单元等各个需要时间同步的模块上面。
35.可选的,由于组合导航单元对数据的实时性要求较高,可选用fpga芯片或实时mcu芯片等实现。
36.可选的,组合导航单元通过rs422总线连接计算单元。
37.需要说明的是,组合导航单元进行数据处理时均采用现有技术,例如,根据定位传感器采集的定位数据生成融合定位结果等,均采用现有技术。
38.感知单元连接前端传感器,用于接收前端传感器采集的感知数据,输出障碍物的时空信息。
39.其中,前端传感器可以包括激光雷达、摄像头、超声波雷达、毫米波雷达中的一种或多种传感器。
40.可选的,感知单元通过车载以太网与激光雷达连接,通过同轴线缆与摄像头连接,通过lin总线与超声波雷达连接,通过can总线与毫米波雷达连接。
41.可选的,感知单元选用算力较高的数据处理平台,如英伟达xavier芯片或soc芯片。
42.可选的,感知单元通过高速pcie总线或高速以太网连接计算单元。
43.需要说明的是,感知单元进行数据处理时均采用现有技术,例如根据前端传感器采集的感知数据产生并输出障碍物的时空信息等等,全部都采用现有技术。
44.计算单元连接组合导航单元、感知单元,用于接收融合定位结果、障碍物的时空信息、高精地图数据以及驾驶任务,输出决策规划信号。
45.其中,决策规划信号包括行为决策信息(如变道、超车、加减速、循迹、左转、右转、掉头、模式切换、泊车)、轨迹规划信息(如路径规划、速度规划、纵横向耦合规划;轨迹跟踪、跟车规划、换道轨迹规划、掉头轨迹规划、原地转向轨迹规划、脱困轨迹规划)等。
46.可选的,考虑到计算单元的数据处理量较大,且对计算速度要求较高,因此计算单元选用算力较高的数据处理芯片,如英伟达芯片。
47.需要说明的是,计算单元进行数据处理时均采用现有技术,例如根据融合定位结果、障碍物的时空信息、高精地图数据以及驾驶任务,输出决策规划信号,全部都采用现有技术。
48.底层控制单元,分别连接计算单元、底层设备传感器和底层设备控制器,用于接收计算单元输出的决策规划信号,接收底层设备传感器采集的车身状态信息,向底层设备控制器输出设备控制信号。
49.车身状态信息是底层设备传感器采集的车辆底层设备的各种状态信息。
50.车辆底层设备包括油门机构、制动机构、转向机构、换挡机构、车辆视听警示装置(如前照灯、辅助照明灯、标志灯、电笛、风笛等)中的一种或多种。
51.底层设备传感器包括油压传感器、氧气传感器、空气流量计、温度传感器、曲轴位置传感器、爆震传感器、轮速传感器、压力传感器、加速度传感器、舵脚传感器、转矩传感器中的一种或多种。
52.相应的,车身状态信息包括上述各类车辆底层设备的位置、压力、力矩、温度、角度、距离、加速度、空气流量等信息。
53.底层设备控制器是用于控制上述各类车辆底层设备执行具体动作的控制设备,如油门控制器、制动控制器、转向控制器、换挡控制器、车灯控制器等。
54.底层控制单元根据决策规划信号、车身状态信息,生成底层设备控制器可识别的设备控制信号。底层设备控制器接收设备控制信号后,控制车辆底层设备执行符合行为决策信息、轨迹决策信息的相应动作。
55.可选的,底层控制单元采用can总线连接底层设备传感器和底层设备控制器,通过can总线接收底层设备传感器采集的车身状态信息,并通过can总线向底层设备控制器输出can总线命令形式的设备控制信号。
56.考虑到底层控制单元与各类底层设备传感器和底层设备控制器连接,需选用安全性高、实时性强的控制器实现底层控制单元,可选的,底层控制单元采用英飞凌功能安全芯片tc29x/tc39x系列等。
57.需要说明的是,底层控制单元进行数据处理时均采用现有技术,例如根据决策规划信号和车身状态信息生成并输出设备控制信号等等,全部都采用现有技术。
58.实施例2
59.本实施例在实施例1的基础上提供了一种自动驾驶车辆的实施例结构。本实施例提供的自动驾驶车辆采用实施例1中任一项模块化自动驾驶系统。
60.需说明的是,本实用新型中的自动驾驶车辆也即是无人驾驶车辆,本实施例的自动驾驶车辆采用上述实施例的模块化自动驾驶系统,其中采用的模块化自动驾驶系统的具体实施细节及效果与上述实施例的模块化自动驾驶系统相同或相似,在此不再赘述。
61.还需要说明的是,本技术中术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、商品或者设备中还存在另外的相同要素。
62.以上结合附图详细描述了本实用新型实施例的可选实施方式,但是,本实用新型实施例并不限于上述实施方式中的具体细节,在本实用新型实施例的技术构思范围内,可以对本实用新型实施例的技术方案进行多种简单变型,这些简单变型均属于本实用新型实施例的保护范围。
63.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本实用新型实施例对各种可能的组合方式不再另行说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1