一种有轨式电动汽车行进中充电系统
1.本实用新型涉及车辆充电技术领域,具体是一种有轨式电动汽车行进中充电系统。
背景技术:
2.近年来,以燃油为主要动力源的传统内燃机汽车的大量使用不仅加剧了全球范围内化石燃料短缺的问题,其排放的尾气中所含有的大量有害物质更会进一步恶化大气环境、威胁人们的身体健康以及加剧温室效应等。为应对该问题,当前世界各国都在积极发展新能源汽车以缓解目前存在的能源危机问题,改善大气环境。经过近几年的发展,电动汽车相关技术得到了显著提升,但仍存在一定瓶颈有待突破,其中车载动力电池较小的容量密度以及较长的充电时间等问题已成为制约电动汽车发展的主要瓶颈,与此同时,提升电池容量的技术难度以及研发成本都在不断提高。相比之下,发展新型充电技术为电动汽车发展提供了一条新的技术路线,目前的充电方案主要有:动态充电、静态充电以及更换电池等,其中在电动汽车行驶状态下进行的动态充电具有充电状态灵活、节约充电时间、有效提升电动汽车汽车续航里程等优点,符合人们对于未来新能源汽车高效出行的期望,具有良好的发展前景。
3.目前现有的有轨式电动汽车行进中充电系统通过安装在汽车底部的充电机械臂与铺设在行驶路面上的充电导轨相接触实现电动汽车在行驶状态下的动态充电,然而,该系统的连续动态充电效果是基于机械臂下方的碳滑板与导轨保持长时间接触来实现的,但由于行驶路面的不平整度会导致车身悬架动桡度的变化,汽车在行驶过程中始终存在垂直于路面方向上的随机振动,而这种振动会随车身通过机械臂传递到碳滑板,进而导致碳滑板在充电导轨上的接触压力无法保持稳定。碳滑板接触压力的变化将会导致碳滑板自身电阻以及其与导轨实际接触面积的变化,进而使得机械臂所提取的电流大小处于极不稳定的状态,严重影响系统的受流性能。并且当机械臂与导轨发生瞬时分离时,还会出现离线电弧灼烧碳滑板的情况,降低设备的使用寿命
技术实现要素:
4.本实用新型的目的在于提供一种有轨式电动汽车行进中充电系统,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种有轨式电动汽车行进中充电系统,包括通过安装架安装于车底的升降机构、用于控制升降机构运动的主动控制系统、以及用于对电动汽车进行供电的导轨,所述升降机构的两侧通过升降臂连接有活动架,所述活动架的下方设置有可沿其长度方向移动的固定架,且所述活动架内设置有用于驱动固定架横移的横移机构,所述活动架的内部设置有四个限位板,每两个所述限位板之间设置有可上下滑动的固定座,所述固定座的底部安装有碳滑板,且所述活动架内设置有缓冲机构;
7.所述主动控制系统包括设置于碳滑板上的压力传感器、以及与压力传感器电性连接的模糊pid控制器,所述模糊pid控制器由模糊化接口、模糊推理机、解模糊接口和知识库组成;
8.所述导轨由输电层及排水层构成,所述输电层由与地面平齐的绝缘层和嵌入地面的输电导轨构成,且所述输电导轨分为正极导轨和负极导轨,所述排水层位于输电导轨下方,且所述输电层与排水层之间设置有供雨水流动的导流孔,所述导流孔与排水道连通。
9.作为本实用新型进一步的方案:所述升降机构包括固定于安装架上的升降电机,所述升降电机的轴部连接有蜗杆,所述蜗杆转动连接有蜗轮,所述蜗轮与蜗杆相互啮合,且所述蜗轮的两端轴部延伸至安装架外侧并与升降臂的端部连接,通过启动升降电机,使得蜗杆带动蜗轮转动,从而使得蜗轮带动两个升降臂做圆弧运动,从而实现对活动架的升降调节,从而实现对碳滑板的高度调节。
10.作为本实用新型再进一步的方案:所述升降电机与模糊pid控制器电性连接。
11.作为本实用新型再进一步的方案:两个所述升降臂之间设置有交叉分布的加强杆,且所述安装架的顶端通过转轴转动连接有连杆,所述连杆的底部通过转轴转动连接有安装座,所述安装座与活动架顶端中间部位固定连接,通过加强杆及连杆的设置,加强了装置的稳定性。
12.作为本实用新型再进一步的方案:所述横移机构包括安装于活动架内部的横移电机,所述横移电机的轴部连接有丝杆,所述丝杆通过轴承与活动架转动连接,所述固定架的上表面中间部位设置有轴杆,所述轴杆的顶端设置有与丝杆螺纹连接的滑块,通过启动横移电机,使得丝杆转动,从而使得滑块带动固定架进行水平方向的一端,从而对碳滑板的水平位置进行调节。
13.作为本实用新型再进一步的方案:所述缓冲机构包括设置于固定架内腔的两个连接轴,两个所述连接轴对称分布,且两个所述连接轴上均设置有扭转弹簧,所述连接轴的两端部均设置有连接杆,所述连接杆远离连接轴的一端通过转轴转动连接有连接臂,所述连接臂的底部通过转轴与固定座的顶端转动连接,且所述限位板的顶端位于连接杆处设置有缺口,当路面激励通过车身振动传递到机械臂碳滑板时,与扭转弹簧相结合的连接杆及连接臂将碳滑板所受到的垂直于碳滑板底部的压力转变为扭转弹簧所受到的扭矩,从而通过扭转弹簧起到缓冲的作用。
14.与现有技术相比,本实用新型的有益效果是:
15.本实用新型通过安装在碳滑板上的压力传感器接收压力信号,实时检测碳滑板的受力情况,之后将实际压力值与目标控制压力值的差值转变为对应升降臂转动角度,通过控制升降电机驱动蜗轮蜗杆机构转动升降臂到达相应位置,从而实现碳滑板所受压力的主动控制,压力主动控制具有响应速度快、控制精度高和工作状态稳定等优点,因此该主动控制系统对于提升有轨式行进中充电系统工作稳定性具有重要的现实意义。
附图说明
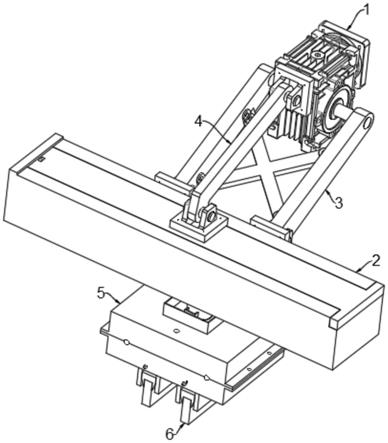
16.图1为一种有轨式电动汽车行进中充电系统的结构示意图。
17.图2为一种有轨式电动汽车行进中充电系统中活动架的结构示意图。
18.图3为一种有轨式电动汽车行进中充电系统中缓冲机构的结构示意图。
19.图4为一种有轨式电动汽车行进中充电系统中模糊pid控制器与压力传感器的连接图。
20.图5为本产品安装于车底的结构示意图。
21.图6为一种有轨式电动汽车行进中充电系统中导轨的结构示意图。
22.图7为一种有轨式电动汽车行进中充电系统中模糊pid控制器的原理图。
23.图8为一种有轨式电动汽车行进中充电系统中e、ec、k
p
、ki的隶属函数趋势图。
24.图9为一种有轨式电动汽车行进中充电系统中kd的隶属函数趋势图。
25.图10为一种有轨式电动汽车行进中充电系统中模糊pid控制器仿真模型图。
26.图11为一种有轨式电动汽车行进中充电系统中模糊pid主动控制情况下碳滑板受力仿真图。
27.图12为一种有轨式电动汽车行进中充电系统中碳滑板受力对比图。
28.图中:1、升降机构;2、活动架;3、升降臂;4、连杆;5、固定架;6、碳滑板;7、横移电机;8、丝杆;9、限位板;10、滑块;11、轴杆;12、连接臂;13、连接杆;14、扭转弹簧;15、连接轴;16、导轨;17、输电层;18、排水层。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.请参阅图1~11,本实用新型实施例中,一种有轨式电动汽车行进中充电系统,包括通过安装架安装于车底的升降机构1、用于控制升降机构1运动的主动控制系统、以及用于对电动汽车进行供电的导轨16,升降机构1的两侧通过升降臂3连接有活动架2,活动架2的下方设置有可沿其长度方向移动的固定架5,且活动架2内设置有用于驱动固定架5横移的横移机构,活动架2的内部设置有四个限位板9,每两个限位板9之间设置有可上下滑动的固定座,固定座的底部安装有碳滑板6,升降机构1包括固定于安装架上的升降电机,升降电机的轴部连接有蜗杆,蜗杆转动连接有蜗轮,蜗轮与蜗杆相互啮合,且蜗轮的两端轴部延伸至安装架外侧并与升降臂的端部连接,通过启动升降电机,使得蜗杆带动蜗轮转动,从而使得蜗轮带动两个升降臂做圆弧运动,从而实现对活动架2的升降调节,从而实现对碳滑板6的高度调节,两个升降臂3之间设置有交叉分布的加强杆,且安装架的顶端通过转轴转动连接有连杆4,连杆4的底部通过转轴转动连接有安装座,安装座与活动架2顶端中间部位固定连接,通过加强杆及连杆4的设置,加强了装置的稳定性,横移机构包括安装于活动架2内部的横移电机7,横移电机7的轴部连接有丝杆8,丝杆8通过轴承与活动架2转动连接,固定架5的上表面中间部位设置有轴杆11,轴杆11的顶端设置有与丝杆8螺纹连接的滑块10,通过启动横移电机7,使得丝杆8转动,从而使得滑块10带动固定架5进行水平方向的一端,从而对碳滑板6的水平位置进行调节,活动架2内设置有缓冲机构,缓冲机构包括设置于固定架5内腔的两个连接轴15,两个连接轴15对称分布,且两个连接轴15上均设置有扭转弹簧14,连接轴15的两端部均设置有连接杆13,连接杆13远离连接轴15的一端通过转轴转动连接有连接臂12,连接臂12的底部通过转轴与固定座的顶端转动连接,且限位板9的顶端位于连接杆13
处设置有缺口,当路面激励通过车身振动传递到机械臂碳滑板6时,与扭转弹簧14相结合的连接杆13及连接臂12将碳滑板6所受到的垂直于碳滑板6底部的压力转变为扭转弹簧14所受到的扭矩,从而通过扭转弹簧14起到缓冲的作用,导轨16由输电层17及排水层18构成,输电层17由与地面平齐的绝缘层和嵌入地面的输电导轨构成,且输电导轨分为正极导轨和负极导轨,排水层18位于输电导轨下方,且输电层17与排水层18之间设置有供雨水流动的导流孔,导流孔与排水道连通,当出现降雨时,雨水可以通过位于输电层和排水层之间的导流孔流入排水道,从而减少发生因积水量过大而导致的漏电风险,主动控制系统包括设置于碳滑板6上的压力传感器、以及与压力传感器电性连接的模糊pid控制器,模糊pid控制器由模糊化接口、模糊推理机、解模糊接口和知识库组成,升降电机与模糊pid控制器电性连接。
31.pid主动控制是将比例、积分、微分三者相结合的线性控制系统,其一般形式如式所示:
[0032][0033]
式中,μ(t)主动控制量增量,e(t)为实际值与目标值的差值,k
p
为比例系数,ki为积分系数,kd为微分系数。
[0034]
传统的pid控制器虽然具有结构简单、反应速度快、适用范围广等优点,但这种控制器一旦被设定,其内部参数将不能改变,因此无法适应复杂多变的工作环境,而汽车振动所产生的碳滑板压力变化又是较为复杂的非线性系统。对此,本实用新型将模糊控制器与传统pid控制器相结合形成模糊pid控制器,利用模糊控制器实时改变pid的三个控制参数,实现pid控制器的自适应调节,从而使其适用于充电机械臂主动调节的工作环境。
[0035]
模糊控制是一种在结合了人们的实际经验,运用模糊语言模仿人类思考方式的新型控制方法,其结构主要由模糊化接口、模糊推理机、解模糊接口和知识库组成,模糊控制的原理图如图7所示。
[0036]
将碳滑板6所受压力的实际值与目标理论值的差值e以及该差值ec的变化率作为模糊化模块的输入参数,k
p
、ki、kd作为解模糊接口的输出参数,输入参数与输出参数的模糊子集均设置为{nb,nm,ns,z,ps,pm,pb}。e、ec、k
p
、ki的论域值为{-3,-2,-1,0,1,2,3},kd的论域值为{-0.6,-0.4,-0.2,0,0.2,0.4,0.6}。
[0037]
本实用新型采用三角函数作为隶属函数,模糊控制器的各个输入参数与输出参数的隶属函数如图8、9所示。
[0038]
本实用新型中的模糊控制器的输入参数e与ec均含有七个模糊子集,它们两者的每个模糊子集都会对应一条模糊规则,因此对于模糊控制器的输出参数k
p
、ti、td中任何一个,均会存在49条模糊规则,根据已有的实践经验对输出参数建立模糊控制规则。
[0039]
根据本系统的实际情况,在解模糊化接口中采用重心法,其表达式如下:
[0040]
式中,μ0是模糊控制器解模糊化得到的精确输出值,xi为模糊控制论域的值,μc(xi)为zi的隶属度值。
[0041]
利用simulink中的fuzzy logic controller模块搭建模糊pid主动控制的碳滑板
受力变化模型,如图10所示。
[0042]
得到升降臂3在模糊pid主动控制情况下的碳滑板6受力变化如图11所示。
[0043]
再将三种不同情况下的碳滑板受力值导入matlab的workspace中进行统计学计算,得到如下表的结果。
[0044]
表1不同控制方法下碳滑板受力指标对比
[0045][0046]
通过图12和表1可以观察到,升降臂3在完全被动适应的情况下碳滑板的受力变化最为剧烈,最大值和最小值分别为98.58n和1.52n,施加pid主动控制算法后最大值与最小值的差值降低到18.59n,施加模糊pid主动控制算法后差值进一步降低为7.61n。用均方差来比较两者对受力波动的抑制效果,可以发现pid主动控制与模糊pid主动都能实现对碳滑板所受压力变化的抑制,但模糊pid主动控制相对于被动适应,均方差降低了92.26%;相对于pid主动控制,均方差降低了61.84%,证明了模糊pid主动控制在该工作环境下更具优越性,能够更加有效地稳定碳滑板所受压力。
[0047]
本实用新型通过安装在碳滑板上的压力传感器接收压力信号,实时检测碳滑板的受力情况,之后将实际压力值与目标控制压力值的差值转变为对应升降臂转动角度,通过控制升降电机驱动蜗轮蜗杆机构转动升降臂到达相应位置,从而实现碳滑板所受压力的主动控制。
[0048]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1