电子式制动系统及其控制方法与流程
1.本发明涉及一种根据与制动踏板的位移相对应的电信号来产生制动力的电子式制动系统及其控制方法。
背景技术:
2.对于线控制动(brake-by-wire)系统的开发正在迅速进行中,其作为对环保和安全的持续要求、紧急制动和自动驾驶的准备的一环,将主缸、助力器、防抱死制动系统(anti-lock brake system,abs)/电子稳定控制(electric stability control,esc)装置之间的机械连接替换为电气和电子连接并进行电装化。尤其,对于通过将主缸和制动器集成到一个块来减少发动机的负载,减轻重量,且可以确保设计灵活性的集成型电子式制动系统的开发要求呈逐渐增加趋势。
3.与现有制动系统不同,这种集成型电子式制动系统在abs工作时,主缸和车轮制动器之间的直接连接分离,因此驾驶员的制动踏板操作不能直接联动到车轮制动器。由此,当abs工作时,不会在制动踏板产生引起振动的反冲(kick back)现象,因此驾驶员无法识别abs是否工作,并且由于abs工作的噪音不大,驾驶员无法识别abs是否工作,因而在防御性驾驶中存在困难。
4.因此,对于集成型电子式制动系统而言,需要一种在abs工作时,能够使驾驶员识别abs是否工作的新方案。
技术实现要素:
5.发明要解决的问题
6.一方面提供一种电子式制动系统及其控制方法,其在abs工作时,能够通知驾驶员abs是否工作。
7.用于解决问题的手段
8.根据一个方面,可以提供一种电子式制动系统,其包括:主缸,与制动踏板相连接,液压供给装置,包括用于产生旋转力的马达和可移动地容纳在压力室的内部的油压活塞,通过所述油压活塞的移动来产生液压,油压控制单元,用于控制从所述液压供给装置传递到轮缸的液压的流动,油压块,所述主缸、所述液压供给装置以及所述油压控制单元集成在所述油压块的内部,以及控制部,用于控制所述马达和所述油压控制单元;在abs工作时,所述控制部将用于激励所述马达的激励电流供给到所述马达以使所述马达产生振动,从而使所述制动踏板振动并向驾驶员通知所述abs工作。
9.在abs工作区间,所述控制部可以使所述马达产生模拟所述制动踏板的反冲(kick back)的振动。
10.在abs工作区间,所述控制部可以周期性地重复供给所述激励电流的abs工作通知开启区间和不供给所述激励电流的abs工作通知关闭区间。
11.所述控制部可以向所述马达供给与abs工作频带不重叠的频率的激励电流。
12.在abs工作区间,所述控制部可以使所述马达产生振动,以产生模拟所述制动踏板的反冲的振动并产生由车身震动引起的通知声音。
13.所述控制部可以向所述马达供给具有互不相同的多个频率的激励电流。
14.所述控制部可以向所述马达供给第一频率和第二频率连续重复的激励电流,以产生重复两种音响的通知声音。
15.在所述abs工作时,所述控制部可以将用于生成所述激励电流的激励电流指令添加到根据目标压力生成的d轴电流指令和q轴电流指令中的所述q轴电流指令,以生成所述激励电流。
16.根据另一方面,可以提供一种电子式制动系统的控制方法,其中,所述电子式制动系统包括:主缸,与制动踏板相连接,液压供给装置,包括用于产生旋转力的马达和可移动地容纳在压力室的内部的油压活塞,通过所述油压活塞的移动来产生液压,油压控制单元,用于控制从所述液压供给装置传递到轮缸的液压的流动,油压块,所述主缸、所述液压供给装置以及所述油压控制单元集成在所述油压块的内部,以及控制部,用于控制所述马达和所述油压控制单元;在所述电子式制动系统的控制方法中,在abs工作时,将用于激励所述马达的激励电流供给到所述马达以使所述马达产生振动,从而使所述制动踏板振动并向驾驶员通知所述abs工作。
17.在abs工作区间,可以使所述马达产生模拟所述制动踏板的反冲的振动。
18.在abs工作区间,可以周期性地重复供给所述激励电流的abs工作通知开启区间和未供给所述激励电流的abs工作通知关闭区间。
19.在abs工作区间,可以使所述马达产生振动以产生模拟所述制动踏板的反冲的振动并产生由车身震动引起的通知声音。
20.在abs工作区间,可以向所述马达供给具有互不相同的多个频率的激励电流。
21.可以向所述马达供给第一频率和第二频率连续重复的激励电流,以产生重复两种音响的通知声音。
22.发明的效果
23.本发明能够在abs工作时,通知驾驶员abs是否工作。
附图说明
24.图1示出实施例的电子式制动系统的示意性结构图。
25.图2示出实施例的电子式制动系统的示意性立体图。
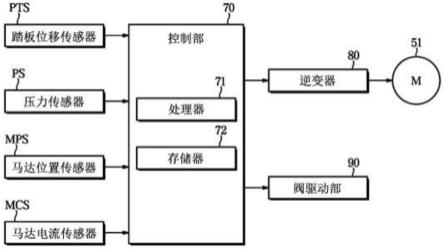
26.图3示出实施例的电子式制动系统的控制框图。
27.图4示出实施例的电子式制动系统的控制部的示意性控制框图。
28.图5示出实施例的电子式制动系统的控制部的详细控制框图。
29.图6示出实施例的电子式制动系统的控制部的详细控制框图的另一例。
30.图7示出实施例的电子式制动系统的逆变器和马达的连接。
31.图8示出实施例的电子式制动系统中的abs工作时的激励电流。
32.图9示出实施例的电子式制动系统中的激励电流的另一例。
33.图10示出实施例的电子式制动系统的控制流程图。
具体实施方式
34.在整个说明书中,相同的附图标记指代相同的构成要素。本说明书并未说明实施例的所有要素,所公开的发明所述技术领域的一般内容或实施例之间重复的内容将被省略。在说明书中使用的术语“部、模块、部件、块”可以由软件或硬件来实现,也可以根据实施例多个“部、模块、部件、块”作为一个构成要素来实现,或一个“部、模块、部件、块”包括多个构成要素。
35.在整个说明书中,当提及某一部分与另一部分“连接”时,不仅包括直接连接的情况,还包括间接连接,而间接连接包括通过无线通信网络连接。
36.此外,当记载某一部分“包括”某一构成要素时,除非有相反的记载,表示还可以包括其他构成要素,而不是排除其他构成要素。
37.在整个说明书中,当记载某一部件位于另一部件“上”时,不仅包括某一部件与另一部件相接的情况,还包括在两个部件之间还存在另一个部件的情况。
38.第一、第二等术语是为了将一个构成要素与其他构成要素区分而使用的,构成要素并不限定在上述术语。在上下文中没有明显的例外的情况下,单数的表达包括复数的表达。
39.在各步骤中,识别符号是为了便于说明而使用的,而不是说明各步骤的顺序,在上下文中没有记载明显的特定顺序的情况下,可以以与记载的顺序不同的顺序实施各步骤。
40.图1示出实施例的电子式制动系统的示意性结构图。图2示出实施例的电子式制动系统的示意性立体图。
41.参照图1及图2,电子式制动系统可以包括:主缸20,设置于油压块30内,通过制动踏板10的操作来加压并排出容纳在内部的加压介质;油压块30,内部设置有用于调节液压的多个流路及阀;车轮制动器40,与上述油压块30相结合,并设置于各车轮;液压供给装置50,与油压块30相结合,通过与制动踏板10的位移相对应的电信号而被驱动,以产生液压,并将所产生的液压供给到设置于各车轮的各车轮制动器40;油压控制单元60,用于控制通过主缸20或液压供给装置50传递到各车轮制动器40的液压的流动;以及控制部(ecu)70,基于液压信息及踏板位移信息来控制液压供给装置50及油压控制单元60。
42.主缸20配置成包括连接到制动踏板10且根据制动踏板10的踩踏力来被加压的主活塞和主腔室,并产生液压。
43.主缸20可以包括与制动踏板10相结合的u形夹21以及与u形夹21相结合的输入轴22。
44.在设置有主缸20的油压块30的上部结合有用于储存油的储油器,以向主缸20提供液压。
45.油压块30呈六面体形状,可以起到将液压传递到设置在各车轮的车轮制动器40的作用。
46.为了控制传递到车轮制动器40的液压,在油压块30内部形成有流路,并且可以在适当的位置设置多个阀。
47.在油压块30的内部可以设置有主缸20。
48.液压供给装置50可以包括:马达51,结合到油压块30的侧面;以及从动缸52,与上述马达51相结合,并通过将旋转力转换成直线运动的动力转换单元来被加压。
49.马达51可以是三相马达。例如,马达51是永磁同步马达(parmanent magnet synchronous motor,pmsm)。马达51可以具有定子和转子。动力转换单元可以配置成具有多个齿轮,上述齿轮从马达51的旋转轴接收旋转力并将旋转运动转换为直线运动。例如,动力转换单元配置成具有蜗杆和蜗轮、齿条和小齿轮的组装结构,以将旋转力转换为直线运动。
50.从动缸52可以包括:从动活塞52a,与主缸20分开地设置于油压块30内,通过马达51的旋转力进行往复移动,并产生液压;以及液压室52b,通过从动活塞52a来被加压。此时,在从动活塞52a的一部分形成有齿条,使得从动活塞52a通过动力转换单元进行直线运动。
51.液压供给装置50可以配置成各种方式和结构的装置。
52.油压控制单元60可以控制从主缸20或液压供给装置50接收液压并传递到车轮制动器40的液压。
53.油压控制单元60可以包括电子打开和关闭的电磁阀。
54.以下,将说明具有上述构成要素的电子式制动系统的abs控制工作。
55.在abs工作时,控制部70可以关闭在主缸20与车轮制动器40之间的流路设置的切断阀,以防止从主缸20排出的液压传递到车轮制动器40。
56.同时,控制部70可以使液压供给装置50工作,以产生液压。例如,可以通过液压供给装置50的马达51工作来移动从动活塞52a,从而在液压室52b产生液压。由液压供给装置50产生的液压可以通过油压控制单元60供给到车轮制动器40,以对车轮产生制动力。此时,控制部70可以通过根据所需abs目标压力驱动液压供给装置50和油压控制单元60,来增加、减少或保持车轮的车轮制动器40的压力。
57.如上所述,在具有上述结构的电子式制动系统中,当abs工作时,主缸20与车轮制动器40之间的直接连接分离,因此驾驶员的制动踏板操作不能直接联动到车轮制动器40。由此,当abs工作时,不会在制动踏板10产生引起振动的反冲现象,abs工作的噪音不大,因而驾驶员会无法识别abs是否工作。
58.因此,需要一种当abs工作时能够使驾驶员识别abs是否工作的新方案。
59.根据实施例的电子式制动系统具有如下结构:即马达51和制动踏板10一同安装在相同的油压块30,因此马达51的振动可以直接传递到制动踏板10。
60.因此,根据实施例的电子式制动系统可以通过控制马达来使马达51产生与abs工作相对应的振动,从而通过传递到制动踏板10的振动模式和由其振动模式产生的通知声音来使驾驶员能够识别abs是否工作。
61.图3示出实施例的电子式制动系统的控制框图。
62.参照图3,电子式制动系统可以包括执行整体控制的控制部70。
63.控制部70的输出侧可以电连接到逆变器80和阀驱动部90。
64.控制部70的输入侧可以电连接到踏板位移传感器pts、压力传感器ps、马达位置传感器mps以及马达电流传感器mcs。
65.逆变器80可以驱动马达51。
66.阀驱动部90可以驱动电子式制动系统的各种电子阀。
67.阀驱动部90可以驱动油压控制单元60的电磁阀。
68.踏板位移传感器pts可以感测制动踏板10的工作及位移。
69.压力传感器ps可以感测车轮制动器40的压力。此外,压力传感器ps可以检测传递
到车轮制动器40的液压。
70.马达位置传感器mps可以检测马达51的旋转位置和旋转速度。马达位置传感器mps可以包括用于检测转子的位置的至少一个霍尔传感器。霍尔传感器是应用了称为霍尔效应(hall effect)的电流磁效应。霍尔效应是指当电流流过化合物半导体并以直角施加磁场时,会在其两端产生电动势(霍尔电压)。当利用该现象测量霍尔电压时,可以确定所施加的磁场是n极还是s极。霍尔传感器是利用如上所述的原理来感测设置于转子的永磁体的磁极变化以获知转子的位置或速度的传感器。
71.马达电流传感器mcs可以检测在马达51的各相中流动的电流。例如,马达电流传感器mcs可以包括:第一电流传感器,用于检测在马达51的三个相中的任一相中流动的电流;以及第二电流传感器,用于检测在剩余两个相中的任一相中的电流。
72.踏板位移传感器pts、压力传感器ps、马达位置传感器mps以及马达电流传感器mcs可以将各自检测到的信息发送到控制部70。
73.控制部70可以被命名为电子控制单元(electronic control unit,ecu)。
74.控制部70可以包括处理器71和存储器72。
75.存储器72临时存储从踏板位移传感器pts、压力传感器ps、马达位置传感器mps以及马达电流传感器mcs接收到的检测数据,并且可以临时存储处理器71对检测数据的处理结果。
76.存储器72不仅可以包括静态随机存储器(s-ram)、动态随机存取存储器(d-ram)等的挥发性存储器,还可以包括闪存、只读存储器(read only memory,rom)、电可擦可编程只读存储器(erasable programmable read only memory,eprom)等的非挥发性存储器。
77.处理器71基于由踏板位移传感器pts、压力传感器ps,马达位置传感器mps以及马达电流传感器mcs检测到的各种信息,通过逆变器80驱动马达51,并且可以通过阀驱动部100驱动油压控制单元60。
78.处理器71驱动马达51及油压控制单元60,从而通过从动活塞52a的移动来产生液压,并将所产生的液压供给到设置于车轮的车轮制动器40,从而可以制动车轮。
79.在正常制动模式下,处理器71可以根据通过踏板位移传感器pts检测到的踏板位移来判断目标压力(指令压力)。
80.在abs模式下,处理器71可以判断根据abs状况的目标压力(指令压力)。
81.处理器71可以通过马达位置传感器mps检测马达位置。
82.处理器71可以从马达位置变化判断从动活塞52a的移动量。可以根据马达位置变化判断从动活塞52a从原点位置移动到当前位置的移动量。
83.处理器71可以通过将从动活塞52a的移动量换算为压力值来判断压力。从动活塞52a越向前移动,液压室52b的体积越小,压力会上升。处理器71可以通过从动活塞52a在相同的体积中移动的移动量来换算压力。反过来也是可行的。
84.处理器71可以将通过压力传感器ps检测到的车轮制动器40的压力判断为回路压力。
85.在正常制动模式下,处理器71可以通过踏板位移传感器pts检测制动踏板10的位移,基于检测到的制动踏板位移判断目标压力,将判断的目标压力设定为车轮制动器40的目标压力,通过压力传感器ps检测车轮制动器40的压力,并且使用马达51的旋转力移动从
动活塞52a以产生液压,以使所检测到的车轮制动器40的压力达到所设定的目标压力。
86.当在正常制动模式控制期间产生abs控制状况时,处理器71可以将正常制动模式转换为abs模式。
87.在abs模式控制时,处理器71将基于abs控制状况的目标压力设定为车轮制动器40的目标压力,通过压力传感器ps检测车轮制动器40的压力,并且使马达51及油压控制单元60工作,以使所检测到的车轮制动器40压力达到所设定的目标压力。
88.在以abs模式工作时,处理器71可以通过激励(excitation/vibration)马达51以使马达51振动,来将振动传递到制动踏板10,从而使驾驶员能够识别出abs工作。
89.在以abs模式工作时,当为了产生液压而驱动马达51时,处理器71对马达51的电流指令施加抖动(dithering)信号,以使压力控制的影响最小化,并通过激励马达来诱发制动踏板10振动,从而使驾驶员能够识别abs是否工作。
90.在以abs模式工作时,若激励马达51,则在马达51产生的振动传递到与马达51一同结合到油压块30的制动踏板10,可以在制动踏板10产生模拟了反冲的形式的振动。
91.驾驶员可以通过感觉到这种制动踏板10的振动来识别abs是否工作。
92.图4示出实施例的电子式制动系统的控制部的示意性控制框图。
93.参照图4,控制部70可以包括压力控制部100、速度控制部110、电流控制部120以及激励电流控制部130。
94.压力控制部100可以输出速度指令,该速度指令用于调节马达51的速度,以使车轮制动器40的实际压力达到指令压力。
95.压力控制部100可以将速度指令输出到速度控制部110。
96.速度控制部110可以输出电流指令,该电流指令用于调节马达51的电流,以使马达51的实际速度达到指令速度。
97.速度控制部110可以将电流指令输出到电流控制部120。
98.电流控制部120可以输出电压指令,该电压指令用于调节马达51的电压,以使马达51的实际电流达到指令电流。
99.电流控制部120可以将电压指令输出到马达51侧。
100.激励电流控制部130可以输出用于激励马达51的激励电流指令。
101.激励电流控制部130可以将激励电流指令输出到电流控制部120。
102.图5示出实施例的电子式制动系统的控制部的详细控制框图。
103.参照图5,压力控制部100包括用于控制压力控制部100的整体动作的压力控制器111,速度控制部110包括用于控制速度控制部110的整体动作的速度控制器111,电流控制部120包括用于控制电流控制部120的整体动作的电流控制器121或电流控制器121/坐标转换器122,激励电流控制部130可以包括用于控制激励电流控制部130的整体动作的激励电流控制器131。
104.马达51可由逆变器80控制。
105.逆变器80可由电流控制器121控制。
106.速度控制器111可以从压力控制器101接收基于指令压力与实际压力之间的压力差的速度指令,并向电流控制器121提供电流指令。
107.电流控制器121向逆变器80输出三相电压指令,逆变器80可根据三相电压指令,向
马达51提供三相电流。
108.马达51安装有马达位置传感器mps,马达位置传感器mps可以检测马达51的转子的速度。检测到的转子的速度可用于速度控制器111中的反馈控制。
109.具体地,电流控制器121可以从速度控制器111接收作为同步坐标系的电流指令id*、iq*的d轴电流指令id*和q轴电流指令iq*,并将同步坐标系的电压指令vd*、vq*传递到坐标转换器122,坐标转换器122将同步坐标系的电压指令转换为三相电压指令(a相、b相、c相),并提供到逆变器80。逆变器80根据接收到的三相电压指令(a相、b相、c相),通过三相开关电路的脉冲宽度调制(pulse width modulation,pwm)的占空比(duty)来向马达51提供三相的电流。
110.还可以将电流控制器121的功能和坐标转换器122的功能集成,以作为一个控制器的电流控制器121来实现(参照图6)。
111.图7示出一实施例的电子式制动系统的逆变器和马达的连接。
112.参照图7,逆变器80可以电连接到作为直流电源的车辆的电池b+和用于平滑电压信号的直流支撑电容器c。直流支撑电容器c可以并联连接到电池b+。直流支撑电容器c可以平滑从用于车辆的电池b+供给的直流电压。可以将通过直流支撑电容器c平滑的直流电压供给到逆变器80。
113.逆变器80可以通过脉冲宽度调制将直流电压转换为具有任意可变频率的激励脉冲形式的三相交流电压,来驱动马达51。逆变器80可以包括多个电力开关元件及多个二极管。例如,逆变器80可以包括六个电力开关元件q1~q6及六个二极管d1~d6。
114.逆变器80可以通过从电流控制器121提供的三相电压指令(a相、b相、c相)接通或断开电力开关元件q1~q6,来将从电池b+供给的电流,即直流电流转换为交流电流,并提供到马达51。此时,电池b+的电压可以通过转换器升压并供给到逆变器80。
115.马达51的各相位端子连接到逆变器80。
116.马达51可以具有三个线圈,如a相线圈、b相线圈及c相线圈。例如,a相线圈、b相线圈及c相线圈可以形成y接线。在马达51中,具有120度相位差的交流电流可以通电到各线圈。由此,马达51的旋转轴可以旋转。
117.再次参照图5或图6,电流控制器121可以向逆变器80施加电压指令,以使逆变器80供给到马达51的驱动电流的测量值遵循电流指令。逆变器80与马达51之间可以设置有用于检测从逆变器80供给到马达51的驱动电流的马达电流传感器mcs。马达电流传感器mcs可以测量三相的驱动电流中的两个以上电流,并再次反馈到电流控制器121。电流控制器121可以进行反馈控制,以使实测的驱动电流的检测值id、iq遵循从速度控制器111接收到的电流指令id*、iq*。
118.另一方面,当将q轴电流指令iq*从速度控制器111传递到电流控制器121时,激励电流控制器131可以在q轴电流指令iq*添加激励电流指令ie或o并传递到电流控制器121。即通过在q轴电流指令iq*中加载激励电流指令ie,使得马达驱动时,可以通过q轴电流指令iq*中加载的激励电流指令ie来使马达51振动。
119.再次参照图3,在以abs模式工作时,处理器71激励马达51,以在制动踏板10产生振动的同时通过马达的振动来使车身震动,由此产生驾驶员能够听到的通知声音,从而驾驶员可以识别出abs工作。振动和通知声音分别可以是重复预设模式的形式。
120.在以abs模式工作时,当为了产生液压而驱动马达51时,处理器71可以在马达51的电流指令中加载激励电流指令,从而使压力控制的影响最小化,同时通过激励马达来诱发特定音响模式,以通过通知声音使驾驶员识别abs是否工作。
121.图8示出实施例的电子式制动系统中的abs工作时的激励电流。
122.参照图8,在abs工作区间,在abs通知开启区间将激励电流指令添加到q轴电流指令iq*,在abs通知关闭区间不将激励电流指令添加到q轴电流指令iq*,使得驾驶员能够明确识别出abs工作和abs解除。
123.激励电流可以具有预设振幅和预设频率。
124.激励电流可以具有“加减(
±
)”到基本指令电流的频率以提供根据abs工作的制动踏板感。
125.激励电流的频率可以在不与abs工作频率重叠的区域确定。
126.激励电流的振幅和周期可以根据马达51的容量及负载的大小而改变。
127.激励电流的振幅以基于q轴电流流入的负载量和流出的负载量相同的方式提供,从而马达速度可能会出现轻微的波动,但在压力方面可以使压力变动最小化。
128.就激励电流的振幅而言,以0为基准,整体振幅值可以分配为0~100,以50为基准,整体振幅值可以分配为
±
50。以任意参考值为基准,将根据其参考值确定的特定值,以
±
方式分配。
129.作为参考,激励电流的振幅可以以q轴电流为基准,以+方向确定振幅值,或以-方向确定振幅值。换言之,可以向一个方向分配振幅。
130.此外,可以调节激励电流模式的整体激励占空比,以使对于压力控制产生的影响最小化。
131.例如,可以以整体激励占空比中的25%占空比施加激励电流的模式以分散负载。
132.此外,可以以整体激励占空比中的50%占空比施加激励电流的模式以分散负载。
133.如上所述,可以改变激励电流的振幅和周期中的至少一种。
134.如上所述,当abs工作时,可以将激励电流指令追加到负载电流指令,来在马达驱动模式下产生振动,对驾驶员的制动踏板传递振动,从而可以使驾驶员识别到正在abs制动中。
135.如上所述,当以abs模式工作时,可以使压力控制的影响最小化,通过马达激励引起特定通知声音,从而通过通知声音使驾驶员识别abs是否工作。
136.在abs工作区间,激励电流可以在abs通知开启区间和abs通知关闭区间周期性地重复。
137.在abs工作区间,激励电流可以不连续地重复。在这种情况下,可以在abs工作区间产生振动以及由于车身震动而引起的通知声音。
138.图9示出实施例的电子式制动系统中的激励电流的另一例。
139.参照图9,在abs工作区间,可以通过改变激励电流的振动周期来产生马达振动和具有特定音色的通知声音。
140.在abs工作区间,在激励电流中,可以混合两种以上互不相同的频率,而不是单一频率。
141.例如,激励电流可以包括具有第一周期的第一频率和具有第二周期的第二频率。
142.激励电流可以连续重复第一频率和第二频率。
143.激励电流具有第一频率和第二频率,使得通知声音的模式可以多样化。根据两种互不相同的频率,马达振动引起车身震动,车身震动可以产生两种音响重复的如哔哔声的通知声音。由此,驾驶员可以通过制动踏板感和通知声音来识别abs是否工作。
144.图10是示出实施例的电子式制动系统的控制流程图。
145.参照图10,首先,控制部70可以判断是否需要abs控制(200)。
146.当工作模式200的判断结果为需要abs控制时,控制部70可以判断根据abs控制状况的指令压力(202)。
147.控制部70可以根据判断的指令压力来生成d轴电流指令和q轴电流指令(204)。
148.控制部70可以在q轴电流指令添加激励电流指令(206)。
149.控制部70可以根据d轴电流指令和添加了激励电流指令的q轴电流指令,通过逆变器80来驱动马达51(208)。因此,马达51可以通过添加到指令电流的激励电流来产生振动,该振动传递到制动踏板10以对制动踏板10产生类似于反冲现象的振动。此外,可以通过激励电流的频率变化来使车身震动产生如哔哔声形式的通知声音。由此,驾驶员可以通过制动踏板的振动和通知声音来识别abs是否工作。
150.在上述实施例中,以在q轴电流指令添加激励电流指令形式进行了说明,但不限于此,也可以在d轴电流指令添加激励电流指令。
151.另一方面,如上所述的控制部和/或其构成要素可以包括与用于存储计算机可读代码/算法/软件的计算机可读记录介质相结合的一个以上处理器/微处理器。处理器/微处理器可以通过执行存储在计算机可读记录介质中的计算机可读代码/算法/软件来执行上述功能、动作、步骤等。
152.上述控制部和/或其构成要素还可以包括由计算机可读非暂时记录介质或计算机可读暂时记录介质实现的存储器。存储器可以由上述控制部和/或其构成要素控制,并且被配置成存储传递到上述控制部和/或其构成要素的数据或从上述控制部和/或其构成要素接收到的数据,或被配置成存储由上述控制部和/或其构成要素处理或待处理的数据。
153.所公开的实施例还可以在计算机可读记录介质以计算机可读代码/算法/软件来实现。计算机可读记录介质可以是计算机可读非暂时记录介质,如能够存储处理器/微处理器可读数据的数据存储装置。作为计算机可读记录介质的示例,包括硬盘驱动器(hdd)、固态驱动器(ssd)、硅磁盘驱动器(sdd)、只读存储器(rom)、cd-rom、磁带、软盘、光学数据存储装置等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1