制动控制装置的制作方法
1.本发明涉及车辆的制动控制装置。
背景技术:
2.若对车辆的前轮施加摩擦制动力以及再生制动力中的至少一方,则在车辆产生防俯冲力作为抑制车辆的俯仰运动的力。若对车辆的后轮施加摩擦制动力以及再生制动力中的至少一方,则在车辆产生防提升力作为抑制车辆的俯仰运动的力。将像防俯冲力或者防提升力等那样因对车轮施加制动力而抑制车辆的俯仰运动的力称为俯仰抑制力。关于这样的俯仰抑制力,如在专利文献1中也记载的那样,已知以下内容,即,在对车轮施加摩擦制动力的情况下在车辆产生的俯仰抑制力大于在对车轮施加再生制动力的情况下在车辆产生的俯仰抑制力。
3.专利文献1中公开的制动控制装置基于来自驾驶员的制动操作量、转向操纵量等驾驶操作信息,来决定再生制动力相对于对车辆施加的制动力的比率亦即再生分配比率,并根据决定的再生分配比率来进行再生制动力与摩擦制动力的调整。
4.专利文献1:日本特开2013-180670号公报
5.在上述那样的制动控制装置中,在基于驾驶操作信息决定的再生分配比率较小时,对车轮施加的摩擦制动力较大。其结果是,在车辆产生的俯仰抑制力变大,而相应地能够抑制车辆的俯仰运动。然而,在该情况下由于对车轮施加的再生制动力较小,因此车辆制动时的使用了再生的能量的回收效率较低。另一方面,在基于驾驶操作信息决定的再生分配比率较大时,虽然由于对车轮施加的再生制动力较大,而能够提高车辆制动时的使用了再生的能量的回收效率,但是因对车轮施加的摩擦制动力较小而在车辆产生的俯仰抑制力较小。因此,存在不能够充分抑制车辆的俯仰运动的情况。
6.因此,在能够进行摩擦制动力与再生制动力的协调控制的车辆中,谋求兼顾车辆制动时的车辆的俯仰运动的抑制、和使用了再生的能量的回收效率的提高。
技术实现要素:
7.用于解决上述课题的制动控制装置是应用于具有调整对车辆的车轮施加的再生制动力的再生制动装置、和调整对上述车轮施加的摩擦制动力的摩擦制动装置的车辆的制动控制装置,其主旨如下,即,具备:控制量导出部,导出对上述车辆施加的制动力的目标值亦即目标车辆制动力;以及制动控制部,基于上述目标车辆制动力控制上述再生制动装置以及上述摩擦制动装置,上述制动控制部在上述目标车辆制动力增大的情况下执行制动力施加处理和替换处理,上述制动力施加处理是使对上述车轮施加的摩擦制动力增大,以使得对上述车轮施加的摩擦制动力大于对该车轮施加的再生制动力的处理,上述替换处理是在上述制动力施加处理执行后,通过将对上述车轮施加的摩擦制动力的至少一部分替换为再生制动力来使对该车轮施加的再生制动力增大的处理。
8.与对车轮施加再生制动力的情况相比,在对该车轮施加摩擦制动力的情况下,能
够增大抑制车辆的俯仰运动的力亦即俯仰抑制力。因此,根据上述结构,在目标车辆制动力增大的情况下,通过制动力施加处理的执行,使对车轮施加的摩擦制动力大于对该车轮施加的再生制动力。由此,与对车轮施加的再生制动力大于对该车轮施加的摩擦制动力的情况相比较,抑制了车辆的俯仰运动。而且,在通过制动力施加处理的执行抑制了车辆的俯仰运动后,通过替换处理的执行,来将对车轮施加的摩擦制动力的至少一部分替换为再生制动力,从而对该车轮施加的再生制动力增大。由此,与不执行替换处理的情况相比较,能够提高车辆制动时的使用了再生的能量的回收效率。
9.即,根据上述结构,能够兼顾车辆制动时的车辆的俯仰运动的抑制、和使用了再生的能量的回收效率的提高。
附图说明
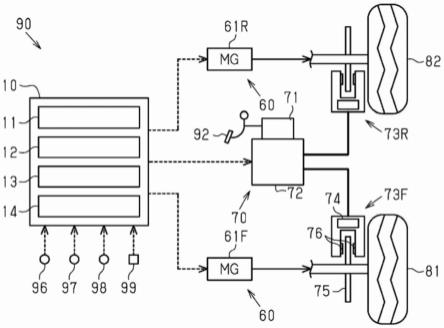
10.图1是示出实施方式的制动控制装置、和应用该制动控制装置的车辆的示意图。
11.图2是对在车辆制动时作用于车辆的力进行说明的示意图。
12.图3是示出实施方式的制动控制装置所执行的处理的流程的流程图。
13.图4是示出通过比较例的制动控制装置对车辆施加的制动力的推移的时间图。
14.图5是示出通过实施方式的制动控制装置对车辆施加的制动力的推移的时间图。
15.图6是示出通过比较例的制动控制装置对车辆施加的制动力的推移的时间图。
16.图7是示出通过实施方式的制动控制装置对车辆施加的制动力的推移的时间图。
具体实施方式
17.以下,参照图1~图7对制动控制装置的一实施方式进行说明。
18.图1示出本实施方式的制动控制装置10、和搭载制动控制装置10的车辆90。
19.车辆90具备前轮81用的摩擦制动机构73f、和后轮82用的摩擦制动机构73r。在摩擦制动机构73f中,轮缸74内的液压越高,则摩擦材料76越强力地按压于与对应于摩擦制动机构73f的前轮81一体旋转的旋转体75。通过将摩擦材料76按压至旋转体75,从而对前轮81施加制动力。后轮82用的摩擦制动机构73r与前轮81用的摩擦制动机构73f相同地构成。因此,通过后轮82用的摩擦制动机构73r对后轮82施加制动力。
20.以下,将通过摩擦制动机构73f的工作来对前轮81施加的制动力称为“前轮摩擦制动力bfpf”,将通过摩擦制动机构73r的工作来对后轮82施加的制动力称为“后轮摩擦制动力bfpr”。
21.车辆90具备通过控制轮缸74内的液压来调整前轮摩擦制动力bfpf以及后轮摩擦制动力bfpr的摩擦制动装置70。摩擦制动装置70具有液压产生装置71和制动致动器72。在制动踏板等制动操作部件92被驾驶员操作时,液压产生装置71产生与其操作量对应的液压。在由驾驶员进行制动操作部件92的操作的情况下,与在液压产生装置71产生的液压对应的量的制动液经由制动致动器72被供给至轮缸74内。
22.制动致动器72通过独立地控制各轮缸74内的液压,从而能够对前轮摩擦制动力bfpf以及后轮摩擦制动力bfpr独立地进行调整。另外,通过由制动控制装置10控制制动致动器72,从而也能够与制动操作部件92的操作量无关地对前轮摩擦制动力bfpf以及后轮摩擦制动力bfpr独立地进行调整。
23.车辆90具备前轮81用的电动发电机61f、和后轮82用的电动发电机61r。车辆90具备具有逆变器以及转换器的功率控制单元、经由功率控制单元与各电动发电机61f、61r进行电力的授受的电池。通过使电动发电机61f作为电动机发挥功能,从而驱动力从电动发电机61f传递至前轮81。另一方面,通过使电动发电机61f作为发电机发挥功能,从而对前轮81施加与电动发电机61f的每单位时间的发电量对应的制动力,将所发电的电力蓄积于电池中。相同地,通过使电动发电机61r作为电动机发挥功能,从而驱动力从电动发电机61r传递至后轮82。另一方面,通过使电动发电机61r作为发电机发挥功能,从而对后轮82施加与电动发电机61r的每单位时间的发电量对应的制动力,将所发电的电力蓄积于电池中。电动发电机61f以及电动发电机61r的发电量相当于使用再生回收的能量的量。即,越增强再生制动力、或越延长再生制动的时间,则电动发电机61f以及电动发电机61r的发电量越增加而能够回收更多的能量。
24.以下,将通过前轮81用的电动发电机61f的发电而对前轮81施加的制动力称为“前轮再生制动力bfrf”,将通过后轮82用的电动发电机61r的发电而对后轮82施加的制动力称为“后轮再生制动力bfrr”。在车辆90中,由各电动发电机61f、61r构成调整对车轮81、82施加的再生制动力的再生制动装置60。
25.车辆90具备用于检测车辆90的状态的各种传感器。作为各种传感器的一个例子,车辆90具备检测车辆90的各车轮中的车轮速度的车轮速度传感器96。车轮速度传感器96分别设置于各车轮。车辆90具备检测制动操作部件92的操作量的行程传感器97。车辆90具备检测车辆90的俯仰率的俯仰率传感器98。
26.另外,车辆90具备用于获取车辆90的周围的信息的周边监视装置99。周边监视装置99例如具有拍摄装置。周边监视装置99的一个例子也可以具有使用了雷达或者激光的检测装置。
27.如图1所示,来自各种传感器的检测信号输入至制动控制装置10。另外,周边监视装置99获取的信息也输入至制动控制装置10。
28.此外,制动控制装置10为以下(a)~(c)中的任一个结构。(a)具备根据计算机程序执行各种处理的一个以上的处理器。处理器包含cpu、以及ram及rom等存储器。存储器储存有构成为使cpu执行处理的程序代码或者指令。存储器即计算机可读介质包含能够通过通用或者专用的计算机访问的所有可利用的介质。(b)具备执行各种处理的一个以上的专用的硬件电路。专用的硬件电路例如是用于特定用途的集成电路即asic(application specific integrated circuit:专用集成电路)、或者fpga(field programmable gate array:现场可编程门阵列)等。(c)具备根据计算机程序执行各种处理的一部分的处理器、和执行各种处理中的剩余的处理的专用的硬件电路。
29.制动控制装置10具备车辆运动判定部11、分配比率导出部12、制动控制部13、以及控制量导出部14作为功能部。
30.控制量导出部14导出与再生制动装置60以及摩擦制动装置70的控制有关的检测值以及目标值等。例如,控制量导出部14基于来自车轮速度传感器96的检测信号,导出车辆90的各车轮中的车轮速度。控制量导出部14基于各车轮速度导出车辆90的车速vs。控制量导出部14基于车速vs导出车辆90的前后加速度gx。控制量导出部14基于来自行程传感器97的检测信号,导出制动操作部件92的操作量。控制量导出部14基于来自俯仰率传感器98的
检测信号,导出车辆90的俯仰率pr。控制量导出部14基于制动操作部件92的操作量,导出目标车辆制动力bft作为对车辆90施加的制动力的目标值。
31.制动控制部13通过基于目标车辆制动力bft以及后述的再生比率α、再生前轮比率β、以及摩擦前轮比率γ控制再生制动装置60以及摩擦制动装置70,来调整对各车轮施加的制动力。
32.分配比率导出部12导出用于通过制动控制部13对再生制动装置60以及摩擦制动装置70的控制来调整对各车轮施加的制动力的分配比率。分配比率包含再生比率α、再生前轮比率β、以及摩擦前轮比率γ。
33.再生比率α表示目标车辆制动力bft中的对车辆90施加的再生制动力bfr的比例。再生制动力bfr是对各车轮施加的再生制动力的合计。也将对各车轮施加的摩擦制动力的合计称为摩擦制动力bfp。再生比率α为“0”~“1”的值。再生比率α为“0”时,由制动控制部13控制摩擦制动装置70,以使目标车辆制动力bft仅通过控制摩擦制动力bfp满足。在再生比率α为“1”时,由制动控制部13控制再生制动装置60,以使目标车辆制动力bft仅由再生制动力bfr满足。在再生比率α比“0”大且比“1”小时,由制动控制部13控制摩擦制动装置70以及再生制动装置60,以使控制摩擦制动力bfp与再生制动力bfr的合计成为目标车辆制动力bft。
34.再生前轮比率β表示将再生制动力bfr分配至前轮再生制动力bfrf和后轮再生制动力bfrr时的前轮再生制动力bfrf的比例。再生前轮比率β为“0”~“1”的值。在再生前轮比率β为“0”时,由制动控制部13控制再生制动装置60,以使后轮再生制动力bfrr的大小与再生制动力bfr的大小相等。在再生前轮比率β为“1”时,由制动控制部13控制再生制动装置60,以使前轮再生制动力bfrf的大小与再生制动力bfr的大小相等。在再生前轮比率β比“0”大且比“1”小时,由制动控制部13控制再生制动装置60,以使前轮再生制动力bfrf与后轮再生制动力bfrr的合计成为再生制动力bfr。
35.摩擦前轮比率γ表示将摩擦制动力bfp分配至前轮摩擦制动力bfpf和后轮摩擦制动力bfpr时的前轮摩擦制动力bfpf的比例。摩擦前轮比率γ为“0”~“1”的值。在摩擦前轮比率γ为“0”时,摩擦制动装置70被控制为后轮摩擦制动力bfpr的大小与摩擦制动力bfp的大小相等。在摩擦前轮比率γ为“1”时,摩擦制动装置70被控制为前轮摩擦制动力bfpf的大小与摩擦制动力bfp的大小相等。在摩擦前轮比率γ比“0”大且比“1”小时,摩擦制动装置70被控制为前轮摩擦制动力bfpf与后轮摩擦制动力bfpr的合计成为摩擦制动力bfp。
36.分配比率导出部12在车辆制动时根据车辆90的状态来使分配比率变动,以便抑制车辆90的俯仰运动。将在后面描述分配比率导出部12对分配比率的导出方式的详细内容。
37.车辆运动判定部11将以目标车辆制动力bft的增大开始前的车辆90的姿势为基准的车辆90的姿势的变化量作为姿势变化量,基于与车辆90的俯仰运动有关的指标来判定姿势变化量是否为规定的判定值以上。当判定为姿势变化量为判定值以上时,车辆运动判定部11输出姿势控制优先判定。当判定为姿势变化量小于判定值时,车辆运动判定部11停止姿势控制优先判定的输出。姿势控制优先判定在使分配比率导出部12对分配比率的导出方式变更时使用。
38.作为车辆90的姿势,例如能够使用车辆90的俯仰角、俯仰率来表示。在将车辆90的姿势设为俯仰角的情况下,姿势变化量是以目标车辆制动力bft的增大开始前的俯仰角为
基准的俯仰角的变化量。另外,在将车辆90的姿势设为俯仰率的情况下,姿势变化量是以目标车辆制动力bft的增大开始前的俯仰率为基准的俯仰率的变化量。
39.所谓与车辆90的俯仰运动有关的指标,是对车辆制动时的车辆90的状态进行了预测的值。例如,车辆90的前后加速度的预测值、车辆90的加加速度的预测值、车辆90的俯仰角速度的预测值、以及车辆90的俯仰角加速度的预测值等是与车辆90的俯仰运动有关的指标。车辆运动判定部11例如基于制动操作部件92的操作量来导出各预测值。车辆运动判定部11也能够基于由周边监视装置99获取的信息来导出各预测值。在车辆运动判定部11存储有与各预测值对应的阈值。各阈值是通过实验等预先导出的值。在各预测值中的至少一个超过阈值时,车辆运动判定部11判定为姿势变化量为判定值以上,输出姿势控制优先判定。即,在预测为在车辆制动时车辆90的姿势较大地变化时,车辆运动判定部11输出姿势控制优先判定。例如,可以在车辆制动开始时输出姿势控制优先判定。
40.这里,考虑获取车辆90的前后加速度的预测值作为与俯仰运动有关的指标的情况。前后加速度的预测值能够基于制动操作部件92的操作量、以及操作量的增大速度等导出。在制动时,前后加速度的绝对值越大,车辆90的姿势越容易较大地变化。因此,能够推测为前后加速度的预测值的绝对值越大则姿势变化量越大。这样,在车辆运动判定部11中,在前后加速度的预测值的绝对值超过阈值时,判定为姿势变化量为判定值以上,输出姿势控制优先判定。
41.对分配比率导出部12对分配比率的导出方式进行说明。首先,使用图2,对在车辆90的制动时作用于车辆90的力进行说明。
42.在图2中,示出在制动时作用于车辆90的惯性力fi、作用于前轮81的全部的制动力亦即前轮制动力f1、以及作用于后轮82的全部的制动力亦即后轮制动力f2。前轮制动力f1是前轮摩擦制动力bfpf与前轮再生制动力bfrf的合计。后轮制动力f2是后轮摩擦制动力bfpr与后轮再生制动力bfrr的合计。能够将前轮制动力f1与后轮制动力f2的合计作为车辆制动力f,使用再生比率α、再生前轮比率β、以及摩擦前轮比率γ如下述(式1)~(式4)那样表示前轮摩擦制动力bfpf、前轮再生制动力bfrf、后轮摩擦制动力bfpr以及后轮再生制动力bfrr。
43.[数1]
[0044]
bfrf=αβf
…
(式1)
[0045]
bfpf=(1-α)γf
…
(式2)
[0046]
bfrr=α(1-β)f
…
(式3)
[0047]
bfpr=(1-α)(1-γ)f
…
(式4)
[0048]
在车辆制动时,抑制车辆90的车体91中的前轮81侧下沉的力通过前轮81用的悬架作用于车体91。将该力称为防俯冲力fad。防俯冲力fad是沿使车体91的前轮81侧,即,车辆90的前部向远离路面的一侧位移的方向作用的力。在图2中以向上的空心箭头表示防俯冲力fad。
[0049]
另外,在车辆制动时,抑制车辆90的车体91中的后轮82侧上浮的力通过后轮82用的悬架作用于车体91。将该力称为防提升力fal。防提升力fal是沿使车体91的后轮82侧,即,车辆90的后部向路面侧位移的方向作用的力。在图2中以向下的空心箭头表示防提升力fal。
[0050]
防俯冲力fad以及防提升力fal是抑制俯仰力矩m的俯仰抑制力。
[0051]
在车辆90所具备的前轮81用的悬架以及后轮82用的悬架中,设定悬架几何,以使得在前轮制动力f1与后轮制动力f2为相互相同的大小时,防提升力fal大于防俯冲力fad。即,在本实施方式中,防提升力fal对应于“第一力”,防俯冲力fad对应于“第二力”。另外,后轮82对应于作为“通过制动力的施加使上述车辆产生上述第一力的车轮”的“第一车轮”。前轮81对应于作为“通过制动力的施加使上述车辆产生上述第二力的车轮”的“第二车轮”。
[0052]
这里,摩擦制动力作用于车轮81、82与路面的接地点,另一方面,再生制动力作用于车轮81、82的车轮中心。在图2中,示出前轮再生制动力bfrf所作用的第一作用点pa1、前轮摩擦制动力bfpf所作用的第二作用点pa2、后轮再生制动力bfrr所作用的第三作用点pa3以及后轮摩擦制动力bfpr所作用的第四作用点pa4。
[0053]
在将前轮81的瞬间旋转中心设为前轮旋转中心cf时,连接第一作用点pa1和前轮旋转中心cf的直线与路面所成的角度亦即第一角度θfr小于连接第二作用点pa2和前轮旋转中心cf的直线与路面所成的角度亦即第二角度θfp。相同地,当将后轮82的瞬间旋转中心设为后轮旋转中心cr时,连接第三作用点pa3和后轮旋转中心cr的直线与路面所成的角度亦即第三角度θrr小于连接第四作用点pa4和后轮旋转中心cr的直线与路面所成的角度亦即第四角度θrp。
[0054]
防俯冲力fad以及防提升力fal能够使用上述(式1)~(式4)、第一角度θfr、第二角度θfp、第三角度θrr以及第四角度θrp表示为下述(式5)以及(式6)。
[0055]
[数2]
[0056]
fad=αβf tanθfr+(1-α)γf tanθfp
…
(式5)
[0057]
fal=α(1-β)f tanθrr+(1-α)(1-γ)f tanθrp
…
(式6)
[0058]
如图2所示,由于第二角度θfp大于第一角度θfr,因此前轮摩擦制动力bfpf与前轮再生制动力bfrf相比,对防俯冲力fad的贡献较大。相同地,由于第四角度θrp大于第三角度θrr,因此后轮摩擦制动力bfpr与后轮再生制动力bfrr相比,对防提升力fal的贡献较大。
[0059]
在图2中,示出车辆90的车辆重心gc。在图2中,示出在车辆制动时产生于车体91的俯仰力矩m。俯仰力矩m是使车体91前倾的力。俯仰力矩m能够基于惯性力fi、从车辆重心gc至路面的距离亦即重心高度h、前轮81的车轮中心与后轮82的车轮中心之间的距离亦即轴距l来运算。
[0060]
用于抑制俯仰运动的防俯冲力fad以及防提升力fal如上述(式5)以及(式6)所示,是随再生比率α、再生前轮比率β以及摩擦前轮比率γ而变化的值。通过调整再生比率α、再生前轮比率β以及摩擦前轮比率γ,能够调整在车辆90产生的防俯冲力fad以及防提升力fal,因此通过根据俯仰力矩m来设定再生比率α、再生前轮比率β以及摩擦前轮比率γ,能够抑制车辆90的俯仰运动。
[0061]
在制动中,分配比率导出部12根据俯仰力矩m来调整再生前轮比率β以及摩擦前轮比率γ,以便抑制车辆90的俯仰运动。
[0062]
此外,防提升力fal与防俯冲力fad相比,对制动力的大小的灵敏度较高。因此,为了高效地产生防提升力fal,优选减小再生前轮比率β以及摩擦前轮比率γ,以使后轮制动力f2变大。但是,当使后轮制动力f2相对于前轮制动力f1过大时,可能产生即使在前轮81未产生规定的减速滑移也在后轮82产生规定的减速滑移的现象,即,后轮提前锁定。因此,为
了确保制动时的车辆90的举动的稳定性,可以调整再生前轮比率β以及摩擦前轮比率γ以便不产生这样的现象。
[0063]
接着,使用图3,对用于调整再生比率α的处理进行说明。图3示出制动控制装置10所执行的处理的流程。在车辆90的制动中,制动控制装置10在至车辆90停止为止期间重复执行本处理例程。
[0064]
若开始本处理例程,则首先,在步骤s101中,制动控制装置10判定车速vs是否为车速判定值vsth以下。车速判定值vsth是用于判定是否是车辆90即将停止之前的阈值。在车速vs为车速判定值vsth以下的情况下,电动发电机61f以及电动发电机61r的旋转速度变低,再生制动力的控制性有可能显著降低。因此,车速判定值vsth也可以说是用于决定所谓的低速替换控制的开始定时的阈值。在车速vs为车速判定值vsth以下的情况下(s101:是),制动控制装置10将处理移至步骤s102。
[0065]
在步骤s102中,制动控制装置10使分配比率导出部12导出分配比率。这里,制动控制装置10使分配比率导出部12变更分配比率的导出方式,以使再生比率α朝向“0”缓缓减少。然后,制动控制装置10结束本处理例程。
[0066]
此外,若在步骤s102的处理中再生比率α减少,则通过制动控制部13对再生制动装置60以及摩擦制动装置70的控制,来针对对车辆90施加的制动力进行从再生制动力向摩擦制动力的替换。由此,摩擦制动力增大。
[0067]
另一方面,在步骤s101的处理中,在车速vs大于车速判定值vsth的情况下(s101:否),制动控制装置10将处理移至步骤s103。
[0068]
在步骤s103中,制动控制装置10判定是否由车辆运动判定部11输出姿势控制优先判定。在存在姿势控制优先判定的情况下(s103:是),制动控制装置10将处理移至步骤s104。
[0069]
在步骤s104中,制动控制装置10导出分配设定用减速度dva。制动控制装置10使用能够从制动操作部件92的操作量导出的车辆90的目标前后加速度gxt,将目标前后加速度gxt减去存储加速度gxb所得的值导出为分配设定用减速度dva。例如,目标前后加速度gxt被导出为制动操作部件92的操作量越多则目标前后加速度gxt的绝对值越大。存储加速度gxb是通过后述的步骤s109的处理存储的值。在未储存有存储加速度gxb的情况下,目标前后加速度gxt的值成为分配设定用减速度dva。当然,在如上述那样导出为分配设定用减速度dva时,也根据基于制动控制装置10的运算处理,来适当地处理目标前后加速度gxt减去存储加速度gxb所得的值以及目标前后加速度gxt与分配设定用减速度dva之间的正负的匹配。之后,制动控制装置10将处理移至步骤s105。
[0070]
在步骤s105中,制动控制装置10基于分配设定用减速度dva,使分配比率导出部12导出分配比率。这里,制动控制装置10使分配比率导出部12变更分配比率的导出方式,以便将再生比率α保持得较小。例如,分配比率导出部12将再生比率α保持为“0”。然后,制动控制装置10结束本处理例程。
[0071]
此外,若在步骤s105的处理中设定了再生比率α,则由制动控制部13基于再生比率α控制再生制动装置60以及摩擦制动装置70。在再生比率α为“0”的情况下,通过制动控制部13使得车辆90不被施加再生制动力而仅被施加摩擦制动力。
[0072]
另一方面,在步骤s103的处理中,在不存在姿势控制优先判定的情况下(s103:
否),制动控制装置10将处理移至步骤s106。在步骤s106中,制动控制装置10判定再生制动力bfr是否小于上限再生制动力bfrt。上限再生制动力bfrt被设定为目标车辆制动力bft以及极限再生值bfrl中的较小的一方的值。所谓极限再生值bfrl是在能够充分确保供由电动发电机61f、61r发电产生的电力充电的电池的空余容量时,能够由两个电动发电机61f、61r对车辆90施加的再生制动力的最大值。此外,极限再生值bfrl存在根据电池的温度等而增减的情况。
[0073]
在步骤s106的处理中,在再生制动力bfr为上限再生制动力bfrt以上的情况下(s106:否),制动控制装置10结束本处理例程。在该情况下,保持在进行了步骤s106的处理的时刻导出的再生比率α。
[0074]
另一方面,在步骤s106的处理中,在再生制动力bfr小于上限再生制动力bfrt的情况下(s106:是),制动控制装置10将处理移至步骤s107。在步骤s107中,制动控制装置10与步骤s104的处理相同地导出分配设定用减速度dva。之后,制动控制装置10将处理移至步骤s108。
[0075]
在步骤s108中,制动控制装置10基于分配设定用减速度dva使分配比率导出部12导出分配比率。这里,制动控制装置10使分配比率导出部12变更分配比率的导出方式,以使再生比率α增大。然后,若使分配比率导出部12变更了分配比率的导出方式,则制动控制装置10将处理移至步骤s109。
[0076]
此外,若在步骤s108的处理中再生比率α增大,则通过制动控制部13对再生制动装置60以及摩擦制动装置70的控制,来针对对车辆90施加的制动力进行从摩擦制动力向再生制动力的替换。
[0077]
在步骤s109中,制动控制装置10获取步骤s108的处理后的前后加速度gx,并将其存储为存储加速度gxb。之后,制动控制装置10结束本处理例程。此外,若制动力向车辆90的施加被消除,则制动控制装置10从存储器消除存储加速度gxb。
[0078]
在如图3所示的处理例程中的步骤s105的处理那样将再生比率α保持得较小的情况下,即使目标车辆制动力bft增大,再生制动力bfr也难以变大而摩擦制动力bfp容易变大。即,制动控制部13根据通过步骤s105的处理导出的分配比率来控制再生制动装置60以及摩擦制动装置70的处理对应于“使对上述车轮施加的摩擦制动力增大以使得对上述车轮施加的摩擦制动力大于对该车轮施加的再生制动力的制动力施加处理”。
[0079]
在如步骤s108的处理那样再生比率α缓缓增大的情况下,摩擦制动力bfp减少,另一方面,再生制动力bfr增大。即,制动控制部13根据通过步骤s108的处理导出的分配比率来控制再生制动装置60以及摩擦制动装置70的处理对应于“在上述制动力施加处理执行后,将对上述车轮施加的摩擦制动力的至少一部分替换为再生制动力来使对该车轮施加的再生制动力增大的替换处理”。
[0080]
在步骤s106的处理中再生制动力bfr为上限再生制动力bfrt以上的情况下,制动控制部13根据已保持的再生比率α来控制再生制动装置60以及摩擦制动装置70的处理对应于“作为在上述替换处理执行后实施的处理,使上述目标车辆制动力中的对上述车轮施加的摩擦制动力的比例、以及上述目标车辆制动力中的对该车轮施加的再生制动力的比例保持的保持处理”。
[0081]
另外,在如步骤s102的处理那样再生比率α朝向“0”缓缓减少的情况下,再生制动
力bfr减少,另一方面,摩擦制动力bfp增大。即,制动控制部13根据通过步骤s102的处理导出的分配比率来控制再生制动装置60以及摩擦制动装置70的处理可称为将对车轮施加的再生制动力替换为摩擦制动力来使对该车轮施加的摩擦制动力增大的低速替换处理。
[0082]
对本实施方式的作用以及效果进行说明。
[0083]
首先,使用图4以及图5,对目标车辆制动力bft为极限再生值bfrl以下的情况的例子进行说明。
[0084]
图4示出对应用比较例的制动控制装置的车辆施加的制动力的推移。在图4所示的比较例的制动控制装置中,从车辆制动开始至上述低速替换控制开始为止,再生比率α为“1”。在图4所示的例子中,如图4的(a)所示,在定时t11至定时t12,目标车辆制动力bft增加。然后,在定时t12及以后,保持目标车辆制动力bft。在定时t11及以后,车辆减速,因此如图4的(b)所示,前后加速度gx为负值。在定时t15以后,车辆停止,因此前后加速度gx为“0”。如图4的(c)所示,俯仰率pr在从制动开始的定时t11至定时t12的期间为正值。在定时t15及以后,伴随着车辆的停止而产生来回晃动。
[0085]
在比较例的制动控制装置中,如图4的(d)所示,在制动开始的定时t11,再生比率α为“1”。因此,如图4的(f)所示,再生制动力bfr增加,另一方面,如图4的(h)所示,未被施加摩擦制动力bfp。其结果是,在该情况下,能够使车辆产生起源于前轮再生制动力bfrf的防俯冲力fad、以及起源于后轮再生制动力bfrr的防提升力fal。然而,不能够使车辆产生起源于前轮摩擦制动力bfpf的防俯冲力fad、以及起源于后轮摩擦制动力bfpr的防提升力fal。
[0086]
在从定时t14至定时t15期间,如图4的(f)以及(h)所示,通过低速替换处理使再生制动力bfr替换为摩擦制动力bfp。
[0087]
此外,如图4的(e)以及(g)所示,再生前轮比率β以及摩擦前轮比率γ被设定为前轮侧的制动力较大。因此,如图4的(f)所示,点划线所示的前轮再生制动力bfrf大于双点划线所示的后轮再生制动力bfrr。另外,如图4的(h)所示,点划线所示的前轮摩擦制动力bfpf大于双点划线所示的后轮摩擦制动力bfpr。
[0088]
图5示出对应用本实施方式的制动控制装置10的车辆90施加的制动力的推移。此外,在图5的(c)~(h)中,以虚线示出图4的(c)~(h)所示的比较例的情况的推移。
[0089]
如图5的(a)所示,从定时t21起目标车辆制动力bft增加。在定时t22及以后,保持目标车辆制动力bft。
[0090]
在制动控制装置10中,在定时t21,在车辆制动开始时判定为姿势变化量为判定值以上,输出姿势控制优先判定。然后,由于存在姿势控制优先判定(s103:是),因此将再生比率α保持得较小(s105)。此时,在图5所示的例子中,如图5的(d)中实线所示,设定“0”作为再生比率α。当像这样通过步骤s105的处理设定了再生比率α时,执行制动力施加处理。
[0091]
其结果是,如图5的(f)中实线所示,在从制动开始的定时t21至定时t22期间,不对车辆施加再生制动力bfr。另一方面,如图5的(h)中实线所示,在该期间,对车辆施加摩擦制动力bfp。即,根据制动控制装置10,代替如图4所示的比较例那样在制动开始时施加的再生制动力bfr而对车辆90施加摩擦制动力bfp。在图5所示的例子中,如图5的(g)所示,设定大于“0”且小于“1”的值作为摩擦前轮比率γ。因此,对前轮81以及后轮82两方施加摩擦制动力。另一方面,由于再生比率α为“0”,因此对前轮81以及后轮82均不施加再生制动力。因此,虽然不能够使车辆产生起源于前轮再生制动力bfrf的防俯冲力fad、以及起源于后轮再生
制动力bfrr的防提升力fal,但能够使车辆产生起源于前轮摩擦制动力bfpf的防俯冲力fad、以及起源于后轮摩擦制动力bfpr的防提升力fal。
[0092]
起源于后轮摩擦制动力bfpr的防提升力fal大于起源于后轮再生制动力bfrr的防提升力fal。起源于前轮摩擦制动力bfpf的防俯冲力fad大于起源于前轮再生制动力bfrf的防俯冲力fad。即,通过对车辆90施加摩擦制动力bfp,能够增大使车辆90产生的俯仰抑制力。在存在姿势控制优先判定的情况下,即,在预测为车辆90的姿势的变化量较大的情况下,由于与比较例的情况相比能够增大俯仰抑制力,因此如图5的(c)中实线所示,与虚线所示的比较例的情况相比能够将俯仰率pr的变动抑制得较小。由此,能够抑制车辆的姿势的急剧变化。
[0093]
并且,如图5的(e)以及(g)所示,再生前轮比率β以及摩擦前轮比率γ被设定为后轮侧的制动力较大。因此,如图5的(f)所示,双点划线所示的后轮再生制动力bfrr大于点划线所示的前轮再生制动力bfrf。并且,在从定时t21至定时t22期间,后轮再生制动力bfrr的增大速度高于前轮再生制动力bfrf的增大速度。另外,如图5的(h)所示,双点划线所示的后轮摩擦制动力bfpr大于点划线所示的前轮摩擦制动力bfpf。并且,在从定时t21至定时t22期间、以及从定时t24至定时t25期间,后轮摩擦制动力bfpr的增大速度高于前轮摩擦制动力bfpf的增大速度。由此,容易增大使车辆90产生的防提升力fal,能够高效地对车辆90施加俯仰抑制力。即,容易抑制车辆90的姿势变动。
[0094]
另外,在图5所示的例子中,在定时t22,姿势控制优先判定的输出停止。即,判定为姿势变化量小于判定值。因此,在定时t22及以后,不存在姿势控制优先判定(s103:否),由于再生制动力bfr小于上限再生制动力bfrt(s106:是),因此如图5的(d)中实线所示,从定时t22开始再生比率α的增大(s108)。即,执行从摩擦制动力bfp向再生制动力bfr的替换处理。
[0095]
其结果是,如图5的(h)中实线所示,在定时t22及以后,摩擦制动力bfp缓缓减少。另一方面,如图5的(f)中实线所示,在定时t22及以后,再生制动力bfr缓缓增大。此外,在图5所示的例子中,在定时t23,摩擦制动力bfp减少至“0”。
[0096]
当在定时t23再生制动力bfr达到上限再生制动力bfrt时(s106:否),从摩擦制动力bfp向再生制动力bfr的替换处理结束,执行保持处理。因此,如图5的(d)中实线所示,在定时t23及以后,保持再生比率α。
[0097]
执行从摩擦制动力bfp向再生制动力bfr的替换处理、以及保持处理的结果是,能够通过再生制动力bfr向车辆的施加来使用再生回收能量。在不存在姿势控制优先判定的情况下,即,在预测为车辆90的姿势的变化量较小的情况下,由于能够使各电动发电机61f、61r的发电量增多,因此能够提高车辆制动时的使用了再生的能量的回收效率。
[0098]
另外,在从定时t24至定时t25期间,如图5的(f)以及(h)所示,通过低速替换处理,再生制动力bfr被替换为摩擦制动力bfp。由此,能够使车辆产生起源于前轮摩擦制动力bfpf的防俯冲力fad、以及起源于后轮摩擦制动力bfpr的防提升力fal来适当地抑制车辆的俯仰角,因此由因车辆的停止而俯仰角返回停止时的角度导致的来回晃动变小。
[0099]
并且,在分配比率导出部12中,调整再生前轮比率β以及摩擦前轮比率γ,以便抑制车辆的俯仰运动。在执行从摩擦制动力bfp向再生制动力bfr的替换处理时,前轮摩擦制动力bfpf以及后轮摩擦制动力bfpr减少,并且,前轮再生制动力bfrf以及后轮再生制动力
bfrr增大。其结果是,有在替换处理开始前和替换处理结束后,作为防俯冲力fad与防提升力fal的合计的俯仰抑制力改变的担忧。因此,例如,可以调整再生前轮比率β以及摩擦前轮比率γ,使得在替换处理开始前与替换处理结束后之间,俯仰抑制力的变化量处于允许范围内。更具体而言,例如,可以沿俯仰抑制力相对于制动力的产生量较大的后轮82的制动力相对于替换处理开始前变大的方向调整再生前轮比率β以及摩擦前轮比率γ。由此,能够抑制伴随着替换处理的执行的车辆的姿势变化。
[0100]
相同地,即使是作为从再生制动力bfr向摩擦制动力bfp的替换的低速替换处理,也可以调整再生前轮比率β以及摩擦前轮比率γ,使得在低速替换处理开始前与低速替换处理结束后之间,俯仰抑制力的变化量处于允许范围内。更具体而言,例如,可以沿俯仰抑制力相对于制动力的产生量较大的后轮82的制动力相对于替换处理开始前变小的方向调整再生前轮比率β以及摩擦前轮比率γ。由此,能够抑制伴随着低速替换处理的执行的车辆的姿势变化。
[0101]
另外,在制动控制装置10中,在导出分配比率时使用目标前后加速度gxt减去存储加速度gxb所得的值亦即分配设定用减速度dva(s105以及s108)。因此,例如,在如定时t22及以后那样保持目标车辆制动力bft期间,在制动操作部件92的操作量增大等而目标车辆制动力bft增大的情况下,考虑目标车辆制动力bft的增大的量地导出分配比率。由此,即使在车辆制动中目标车辆制动力bft进一步增大的情况下,也能够抑制车辆90的俯仰运动。
[0102]
接着,使用图6以及图7,对目标车辆制动力bft大于极限再生值bfrl的情况的例子进行说明。
[0103]
图6示出对应用比较例的制动控制装置的车辆施加的制动力的推移。在图6所示的比较例的制动控制装置中,从车辆制动开始至上述低速替换控制开始,再生比率α保持为比“0”大且比“1”小的规定值。
[0104]
在图6所示的例子中,如图6的(a)所示,从定时t31至定时t32,目标车辆制动力bft增加。在定时t32及以后,保持目标车辆制动力bft。如图6的(f)以及(h)所示,仅通过再生制动力bfr无法满足目标车辆制动力bft,因此除了再生制动力bfr以外还施加摩擦制动力bfp。在从定时t34至定时t35期间,通过低速替换处理,再生制动力bfr被替换为摩擦制动力bfp,摩擦制动力bfp进一步增大。
[0105]
图7示出对应用本实施方式的制动控制装置10的车辆90施加的制动力的推移。此外,在图7的(c)~(h)中,以虚线示出图6的(c)~(h)所示的比较例的情况的推移。
[0106]
从制动开始的定时t41起执行制动力施加处理。在执行制动力施加处理的情况下,在图7所示的例子中,如图7的(d)中实线所示,再生比率α为“0”。其结果是,如图7的(f)中实线所示,在从定时t41至替换处理开始的定时t42的期间,不对车辆施加再生制动力bfr。另一方面,如图7的(h)中实线所示,在该期间,对车辆施加摩擦制动力bfp。
[0107]
在图6所示的比较例中,对前轮81以及后轮82分别均施加再生制动力以及摩擦制动力。与此相对,在图7所示的例子中,由于再生比率α为“0”,因此对前轮81以及后轮82分别仅施加再生制动力以及摩擦制动力中的摩擦制动力。因此,能够使作为防俯冲力fad与防提升力fal的合计的俯仰抑制力与图6所示的比较例的情况相比较大。
[0108]
此外,在图7所示的例子中,由于目标车辆制动力bft大于极限再生值bfrl,因此与图5所示的例子相比较而言,目标车辆制动力bft较大。因此,在图7所示的例子中的制动力
施加处理中,与图5所示的例子相比,摩擦制动力bfp较大地增大。
[0109]
在图7所示的例子中,在定时t42,姿势控制优先判定的输出停止。因此,在定时t42及以后,不存在姿势控制优先判定(s103:否),由于再生制动力bfr小于上限再生制动力bfrt(s106:是),因此如图7的(d)中实线所示,从定时t42起再生比率α增大(s108)。因此,执行从摩擦制动力bfp向再生制动力bfr的替换处理。
[0110]
其结果是,如图7的(h)中实线所示,在定时t42及以后,摩擦制动力bfp缓缓减少。另一方面,如图7的(f)中实线所示,在定时t42及以后,再生制动力bfr缓缓增大。
[0111]
在图7所示的例子中,由于目标车辆制动力bft大于极限再生值bfrl,因此设定极限再生值bfrl作为上限再生制动力bfrt。在图7所示的例子中的替换处理中,通过分配比率导出部12导出分配比率,以便通过摩擦制动力bfp弥补目标车辆制动力bft与上限再生制动力bfrt的差。其结果是,虽然如图7的(h)中点划线所示,在定时t43,前轮摩擦制动力bfpf减少至“0”,但如双点划线所示,在定时t43及以后,也继续施加后轮摩擦制动力bfpr。另外,如图7的(f)所示,作为再生制动力,不施加后轮再生制动力bfrr而仅施加点划线所示的前轮再生制动力bfrf。
[0112]
在从定时t44至定时t45的期间,通过停止时替换处理,再生制动力bfr被替换为摩擦制动力bfp。在本实施方式中,如图7那样,从定时t44起前轮再生制动力bfrf降低到“0”,作为代替,从定时t44起前轮摩擦制动力bfpf增加。另一方面,由于后轮再生制动力bfrr在定时t44已经为“0”,因此后轮摩擦制动力bfpr在定时t44及以后也维持定时t44的制动力。
[0113]
根据制动控制装置10,在从定时t41至定时t42的期间,预测为车辆90的姿势的变化量较大,因此对车辆90施加制动力,以使得与再生制动力bfr相比摩擦制动力bfp增大。由此,与能够增大俯仰抑制力对应地,如图7的(c)中实线所示,与虚线所示的图6的比较例的情况相比较而言,能够将俯仰率pr抑制得较小。即,能够抑制车辆的姿势的急剧变化。
[0114]
并且,通过分配比率被导出为后轮摩擦制动力bfpr以及后轮再生制动力bfrr较大,从而与图6所示的例子相比较而言能够较大地产生防提升力fal。由此也能够将俯仰率pr抑制得较小。
[0115]
这样,根据制动控制装置10,即使在目标车辆制动力bft较大的情况下,也能够兼顾车辆制动时的车辆90的俯仰运动的抑制、和使用了再生的能量的回收效率的提高。
[0116]
本实施方式能够如以下那样变更并实施。本实施方式以及以下的变更例能够在技术上不矛盾的范围内相互组合并实施。
[0117]
·
作为搭载制动控制装置10的车辆,存在设定悬架几何,以使得防俯冲力fad大于防提升力fal的情况。在该情况下,防俯冲力fad对应于“第一力”,防提升力fal对应于“第二力”。前轮81对应于“第一车轮”,后轮82对应于“第二车轮”。在这样的车辆中,通过与后轮制动力相比较大地施加前轮制动力,从而与上述实施方式相同地,能够抑制车辆制动时的车辆的俯仰运动。更详细而言,在制动力施加处理中,通过使前轮再生制动力bfrf大于后轮再生制动力bfrr,能够增大俯仰抑制力,进而能够抑制车辆制动时的车辆的俯仰运动。
[0118]
·
在上述实施方式中,示出了使在制动力施加处理中导出的再生比率α为“0”的例子。只要能够抑制车辆90的俯仰运动,则也可以将在制动力施加处理的执行期间对车辆90施加的摩擦制动力bfp的一部分作为再生制动力bfr来对车辆90施加。即,制动力施加处理中的再生比率α不限于为“0”。例如,能够在与图4的比较例中的定时t11至定时t12的期间的
再生比率相比较小的范围设定再生比率α,或在与图6的比较例中的定时t31至定时t32期间的再生比率相比较小的范围设定再生比率α。若能够在制动力施加处理的执行期间也施加再生制动力bfr,则能够进一步提高使用了再生的能量的回收效率。
[0119]
·
在从摩擦制动力bfp向再生制动力bfr的替换处理中,也可以变更该替换处理中的摩擦制动力bfp的减少速度。例如,能够变更摩擦制动力bfp的减少速度,使得与通过制动力施加处理使摩擦制动力bfp增大所需要的时间相比,通过替换处理使摩擦制动力bfp减少所需要的时间较长。在该情况下,即使在替换处理的开始时的俯仰抑制力与替换处理结束后的俯仰抑制力之间存在差异,也容易抑制伴随着替换处理的执行的车辆的姿势的变化。
[0120]
·
在上述实施方式中,基于与车辆90的俯仰运动有关的指标来判定姿势变化量是否为判定值以上,在判定为姿势变化量为判定值以上时,执行制动力施加处理。另外,若从判定为姿势变化量为判定值以上的状态移行至判定为姿势变化量小于判定值的状态,则执行替换处理。然而,开始替换处理的定时不限于此。例如,也可以在制动力施加处理的执行期间,在已成为判定为姿势变化量小于判定值的状态的情况下,以该状态的持续时间达到规定时间为契机,开始替换处理。
[0121]
另外,例如,也可以在判定为目标车辆制动力bft增大时,执行制动力施加处理,若从判定为目标车辆制动力bft增大的状态移行至判定为目标车辆制动力bft不增大的状态时,执行替换处理。
[0122]
另外,例如,在目标车辆制动力bft的增大开始的情况下,也可以从增大的开始时刻起执行制动力施加处理直到经过规定时间为止,在经过规定时间后,执行替换处理。
[0123]
·
制动控制装置10也可以具备执行与制动操作部件92的操作量无关地设定目标车辆制动力bft并对车辆90施加制动力的制动辅助控制的功能。在基于制动辅助控制的车辆制动时,经由执行图3所示的处理例程来与上述实施方式相同地进行分配比率的调整,由此能够兼顾车辆制动时的车辆90的俯仰运动的抑制、和使用了再生的能量的回收效率的提高。
[0124]
另外,根据车辆的不同,存在具有能够通过一个操作部件的操作来调整车辆的加减速度的功能的车辆。在这样的车辆中也能够应用制动控制装置10。在该情况下,在通过该操作部件的操作对车辆要求减速的情况下,导出与减速度的要求值对应的目标车辆制动力bft,基于该目标车辆制动力bft控制再生制动装置60以及摩擦制动装置70。即使在这种情况下,也能够通过执行图3所示的处理例程,来与上述实施方式相同地进行分配比率的调整。其结果是,能够兼顾车辆制动时的车辆的俯仰运动的抑制、和使用了再生的能量的回收效率的提高。
[0125]
·
上述实施方式中的车辆90具备前轮81用的电动发电机61f和后轮82用的电动发电机61r,能够对前轮81以及后轮82施加再生制动力。应用制动控制装置10的车辆具备对前轮81以及后轮82中的至少一方的车轮施加再生制动力的再生制动装置即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1