车辆控制系统的制作方法
1.本揭示涉及一种车辆控制系统。
背景技术:
2.一直以来,车辆的防盗系统相关的发明为人所知(下述专利文献1等)。专利文献1中记载的防盗控制器控制车中搭载的各种电子装置来进行不正常的动作。具体而言,例如反复开闭中央锁止系统、反复使电动座椅前后滑动、间歇性地使燃料泵抽油、或者使自动变速系统挡位检测器持续输出相同的挡位电子信号。由此来阻止盗贼正常驾驶的行为、使其丧失窃盗意志而放弃盗车行为(该文献的摘要等)。现有技术文献专利文献
3.专利文献1:日本专利特开2006-015977号公报
技术实现要素:
发明要解决的问题
4.上述专利文献1的防盗控制器控制车辆中搭载的各种电子装置而进行不正常的动作。因此,这些各种电子装置给出的控制指示和与该控制指示相竞争的非法驾驶者的操作所产生的控制指示传递至车辆的执行器,有车辆变得不稳定而陷入危险状态之虞。
5.本揭示提供一种能够安全且强制性地控制车辆的车辆控制系统。解决问题的技术手段
6.本揭示的一形态为一种车辆控制系统,其搭载于车辆中,其特征在于,所述车辆具备:操作部,其输出与驾驶者的操作相应的操作信号;动作控制部,其根据所述操作信号来控制所述车辆的动作;以及通信机,其接收从所述车辆外部发送的信号,所述车辆控制系统具备:模式设定部,其在经由所述通信机从所述车辆外部接收到强制控制指示时,输出强制模式信号;强制操作部,其对所述动作控制部输出使所述车辆强制性地动作的强制操作信号;以及信号选择部,其在所述强制模式信号的接收前使所有所述操作信号通过,在所述强制模式信号的接收后拦截所述操作信号的至少一部分,并且使所述强制操作信号代替拦截下来的所述操作信号而通过,根据通过了所述信号选择部的所述操作信号或所述强制操作信号来控制所述动作控制部,由此控制所述车辆的动作。发明的效果
7.根据本揭示的上述一形态,可以提供一种能够安全且强制性地控制车辆的车辆控制系统。
附图说明
8.图1为表示本揭示的车辆控制系统的实施方式1的概略图。图2为图1的车辆控制系统的框图。
图3为表示图2的车辆控制系统的动作的一例的流程图。图4为表示图2的位置检测部的构成的一例的框图。图5为表示图4的位置检测部的动作的一例的流程图。图6为表示本揭示的车辆控制系统的实施方式2的框图。图7为表示图6的车辆控制系统中包含的动作控制部的构成的框图。图8为表示图7的动作控制部的动作的一例的流程图。图9为表示本揭示的车辆控制系统的实施方式3的动作控制部的框图。图10为表示图9的动作控制部的动作的一例的流程图。图11为表示本揭示的车辆控制系统的实施方式4的框图。图12为表示图11的车辆控制系统的动作的一例的流程图。图13为表示本揭示的车辆控制系统的实施方式5的框图。图14为表示本揭示的车辆控制系统的实施方式6的框图。
具体实施方式
9.下面,参考附图,对本揭示的车辆控制装置的实施方式进行说明。
10.[实施方式1]图1为表示本揭示的车辆控制系统的实施方式1的概略图。本实施方式的车辆控制系统vcs至少部分搭载于车辆v中,对车辆v各部的动作进行控制。车辆v具备输出与驾驶者的操作相应的操作信号的操作部10、根据操作信号来控制车辆v的动作的动作控制部20、以及接收从车辆v外部发送的信号的通信机30。此外,车辆v例如还具备检测车辆的位置的位置检测部40。
[0011]
通信机30例如通过无线通信线路而经由基站bs以能够信息通信的方式连接至数据中心dc。此外,车辆v的所有者或正当使用者所持有的便携式信息终端pda例如通过无线通信线路而经由基站bs以能够信息通信的方式连接至数据中心dc。位置检测部40例如由全球定位卫星系统(global navigation satellite system:gnss)的接收机等构成。
[0012]
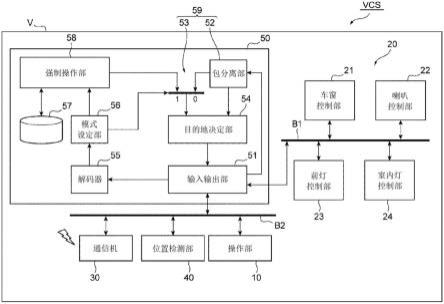
图2为图1所示的车辆控制系统vcs的框图。本实施方式的车辆控制系统vcs例如为搭载于车辆v中的中央网关(cgw)单元50。cgw单元50是具有对can(controller area network)、以太网(注册商标)等车载lan(local area network)的数据进行中继的功能的电子控制单元(electronic control unit:ecu)。cgw单元50例如包含输入输出部、中央处理装置(cpu)、rom和ram等存储装置、存储在该存储装置中的数据和程序、以及计时器。即,cgw单元由硬件、软件以及固件构成。
[0013]
再者,车辆控制系统vcs也可为除了cgw单元50以外还包含多个can总线和连接于各can总线的多个ecu的构成。多个can总线例如包括车身总线b1和信息总线b2。此外,虽然图2中省略了图示,但多个can总线例如包括车辆v的驱动有关的动力系总线。多个ecu例如包括连接于车身总线b1而控制车辆v各部的动作的动作控制部20。信息总线b2上例如连接有前文所述的通信机30、位置检测部40以及操作部10。
[0014]
操作部10输出与车辆v的驾驶者的操作相应的操作信号。操作部10例如包括方向盘、加速踏板、制动踏板、换挡杆、车窗的开闭开关、喇叭开关、前灯开关、室内灯开关、转向灯开关、危险信号灯开关等。
[0015]
动作控制部20例如包括车窗控制部21、喇叭控制部22、前灯控制部23以及室内灯控制部24。车窗控制部21控制车辆v的车窗的开闭。喇叭控制部22控制车辆v的喇叭的鸣放。前灯控制部23控制车辆v的前灯的点亮和熄灭。此外,前灯控制部23也可控制车辆v的转向灯的闪烁。室内灯控制部24控制车辆v的室内灯的点亮和熄灭。
[0016]
通信机30接收从车辆v外部发送的信号。此外,通信机30将由位置检测部40检测到的车辆v的位置信息发送至车辆v外部。位置检测部40例如具备gnss的接收机,获取车辆v的位置信息。本实施方式的位置检测部40的构成于后文叙述。
[0017]
cgw单元50例如分别连接于车身总线b1和信息总线b2。车身总线b1和信息总线b2上的can数据包的通信在各总线上进行。此外,信息总线b2与车身总线b1之间的can数据包的通信由cgw单元50进行中继。
[0018]
cgw单元50例如具有输入输出部51、包分离部52、选择器53、目的地决定部54、解码器55、模式设定部56、存储部57以及强制操作部58。图2所示的cgw单元50的各部为cgw单元50的功能块,表现出由构成cgw单元50的硬件、软件以及固件等实现的cgw单元50的功能。
[0019]
输入输出部51将从操作部10输入的操作信号输出至包分离部52。包分离部52将从输入输出部51输入的操作信号当中针对特定的动作控制部20的操作信号分离并输出至选择器53,将针对其他动作控制部的操作信号输出至目的地决定部54。此处,包分离部52例如将针对车窗控制部21、喇叭控制部22、前灯控制部23以及室内灯控制部24的操作信号分离并输出至选择器53。
[0020]
选择器53在从模式设定部56接收到强制模式信号之前在正常模式下进行动作。在正常模式下,选择器53使从包分离部52输入的操作信号通往目的地决定部54。此外,当选择器53从模式设定部56接收到强制模式信号时,被设定为强制模式。当选择器53被设定为强制模式时,拦截从包分离部52输入的操作信号,并使从强制操作部58输入的强制操作信号通过。
[0021]
在本实施方式的车辆控制系统vcs中,由包分离部52和选择器53构成信号选择部59。信号选择部59在选择器53接收到强制模式信号前使所有操作信号通过,在选择器53接收到强制模式信号后拦截操作信号的至少一部分,而且使强制操作信号代替拦截下来的操作信号而通过。
[0022]
目的地决定部54根据操作信号或强制操作信号的包中包含的can-id而将操作信号或强制操作信号的包的目的地设定为包括车身总线b1、信息总线b2的多个can总线中的一个can总线。输入输出部51将已设定目的地的操作信号或强制操作信号的包发送至所设定的目的地的can总线。
[0023]
解码器55对由通信机30接收并经由信息总线b2输入至输入输出部51的强制控制指示的信号进行解码。此处,强制控制指示的信号例如具有特定的can-id。例如,当强制控制指示的信号输入至输入输出部51时,解码器55根据该特定的can-id而检测到强制控制指示的接收,对该强制控制指示的信号进行解码并输出至模式设定部56。
[0024]
当模式设定部56从解码器55接收到强制控制指示时,对选择器53和强制操作部58输出强制模式信号。如此,通过由模式设定部56接收强制控制指示并输出强制模式信号,车辆控制系统vcs被设定为强制模式。换句话说,在模式设定部56接收到强制控制指示之前,车辆控制系统vcs在正常模式下进行动作。
[0025]
存储部57记录有用于使车辆v的特定部分以特定动作强制性地动作的强制操作信号。此处,所谓车辆v的特定部分,例如是与车辆v的行驶无关、不会对车辆v的行驶中的安全产生影响的部分,例如可列举车窗、喇叭、前灯、转向灯、危险信号灯、室内灯等。车辆v各部的特定动作例如包括车窗的强制开闭、喇叭的强制鸣放、前灯的强制闪烁、危险信号灯的强制闪烁、室内灯的强制闪烁等。
[0026]
此外,存储部57记录有强制操作信号,所述强制操作信号例如在车辆控制系统vcs被设定成强制模式的情况下用于使位置检测部40将车辆v的位置信息经由通信机30强制性地发送至车辆v外部。
[0027]
强制操作部58例如当从模式设定部56接收到强制模式信号时被设定为强制模式,从存储部57读取强制操作信号并输出至选择器53。从强制操作部58输入至选择器53的针对各动作控制部20的强制操作信号例如包含与从包分离部52输入至选择器53的针对各动作控制部20的操作信号同样的can-id。
[0028]
接着,对本实施方式的车辆控制系统vcs的动作的一例进行说明。
[0029]
图3为表示本实施方式的车辆控制系统vcs的动作的一例的流程图。例如,当车辆v的起动开关被设为导通时,车辆控制系统vcs开始图3所示的处理。当车辆v的驾驶者操作车辆v的操作部10时,从操作部10输出与驾驶者的操作相应的操作信号。从操作部10输出的操作信号经由信息总线b2输入至cgw单元50的输入输出部51。
[0030]
如图3所示,车辆控制系统vcs首先执行将输入到cgw单元50的一部分操作信号分离的处理p11和将这一部分操作信号以外的其他操作信号输出至特定的can总线的处理p12。具体而言,在处理p11中,cgw单元50将输入到输入输出部51的操作信号输出至包分离部52。包分离部52将从输入输出部51输入的操作信号当中例如针对包括车窗控制部21、喇叭控制部22、前灯控制部23以及室内灯控制部24的特定的动作控制部20的操作信号分离并输出至选择器53。
[0031]
此外,在处理p12中,包分离部52例如将从输入输出部51输入的操作信号当中输出到选择器53的操作信号以外的其他操作信号输出至目的地决定部54。目的地决定部54根据从包分离部52输入的操作信号的包中包含的can-id而将该操作信号的包的目的地设定为包括车身总线b1、信息总线b2的多个can总线中的一个can总线。输入输出部51将已设定目的地的操作信号输出至所设定的特定的can总线。
[0032]
由此,对特定的动作控制部20以外的其他动作控制部输出操作信号。结果,例如根据与车辆v的所有者或正当使用者等正当驾驶者对操作部10的操作相应的操作信号来控制动作控制部20以外的动作控制部,例如,车辆的行驶有关的各部根据驾驶者的操作进行动作而使车辆行驶。
[0033]
接着,cgw单元50执行判定有无强制控制指示的处理p13。在该处理p13中,模式设定部56在未经由通信机30、信息总线b2、输入输出部51以及解码器55从车辆v外部接收到强制控制指示的情况下判定无强制控制指示(否),不对选择器53输出强制模式信号。结果,cgw单元50不被设定为强制模式而是维持在正常模式。在该正常模式下,选择器53执行使经包分离部52分离并输出到选择器53的操作信号通过的处理p14。
[0034]
接着,cgw单元50执行将通过了选择器53的操作信号输出的处理p15。具体而言,选择器53将通过之后的操作信号输出至目的地决定部54。目的地决定部54根据从选择器53输
入的操作信号中包含的can-id将操作信号的包的目的地设定为车身总线b1。输入输出部51将已设定目的地的操作信号发送至车身总线b1。
[0035]
由此,根据正当驾驶者对操作部10的操作而对特定的动作控制部20输出操作信号。结果,在正常模式下,根据与正当驾驶者对操作部10的操作相应的操作信号来控制特定的动作控制部20,包括车窗、喇叭、前灯以及室内灯的车辆v的特定部分根据驾驶者对操作部10的操作进行动作。
[0036]
另一方面,例如在车辆v被盗等车辆v被非法驾驶者开走的情况下,车辆v的所有者或正当使用者操作图1所示的手机或智能手机等便携式信息终端pda而向数据中心dc通知强制控制的开始。当数据中心dc从车辆v的所有者或正当使用者所持有的便携式信息终端pda接收到强制控制开始的通知时,根据所通知的信息来确定成为强制控制的对象的车辆v,并对确定下来的车辆v发送强制控制指示的信号。
[0037]
cgw单元50的输入输出部51经由通信机30及信息总线b2来接收从车辆v外部的数据中心dc发送的强制控制指示。解码器55对输入输出部51所接收到的强制控制指示的信号进行解码,并输出至模式设定部56。当模式设定部56从解码器55接收到强制控制指示时,在前文所述的判定有无强制控制指示的处理p13中判定有强制控制指示(是),从而执行将cgw单元50设定为强制模式的处理p16。
[0038]
在处理p16中,模式设定部56对选择器53和强制操作部58输出强制模式信号,将选择器53和强制操作部58设定为强制模式,从而将cgw单元50设定为强制模式。被设定成强制模式的强制操作部58例如执行读出存储部57中存储的强制操作信号并输出至选择器53的处理p17。此外,被设定成强制模式的选择器53执行拦截从包分离部52输入的操作信号、使从强制操作部58输入的强制操作信号通过的处理p18。
[0039]
接着,被设定成强制模式的cgw单元50执行将通过了选择器53的信号输出的处理p15。在该处理p15中,目的地决定部54根据通过了选择器53的强制操作信号的包中包含的can-id将强制操作信号的包的目的地设定为车身总线b1。继而,输入输出部51将已设定目的地的强制操作信号的包输出至车身总线b1。
[0040]
当动作控制部20经由车身总线b1接收到强制操作信号时,根据该强制操作信号使车辆v的各部动作。即,当cgw单元50被设定为强制模式时,动作控制部20使车辆v的特定部分强制性地动作而与驾驶者对操作部10的操作无关。车辆v的特定部分的强制动作例如包括基于车窗控制部21的车辆v的车窗的强制开闭、基于喇叭控制部22的喇叭的强制鸣放、基于前灯控制部23的前灯的强制闪烁、基于室内灯控制部24的室内灯的强制闪烁等。
[0041]
这些车辆v的特定部分的强制动作能让车辆v周围的其他车辆的驾驶者或行人认识到车辆v正在发生不同于寻常的紧急情况而不会对车辆v的行驶的安全性产生影响。由此,例如盗窃犯等车辆v的非法驾驶者不得不中止车辆v的驾驶而从车辆v上下来,从而能阻止车辆v被盗或者车辆v的所有者或正当使用者以外的非法驾驶者对车辆v的驾驶。
[0042]
如上所述,本实施方式的车辆控制系统vcs由cgw单元50构成并搭载于车辆v中。车辆v具备输出与驾驶者的操作相应的操作信号的操作部10、根据该操作信号来控制车辆v的动作的动作控制部20、以及接收从车辆v外部发送的信号的通信机30。车辆控制系统vcs具备模式设定部56、强制操作部58以及信号选择部59。当模式设定部56经由通信机30从车辆v外部接收到强制控制指示时,输出强制模式信号。强制操作部58对动作控制部20输出使车
辆v强制性地动作的强制操作信号。信号选择部59在强制模式信号的接收前使所有操作信号通过,在强制模式信号的接收后拦截操作信号的至少一部分,而且使强制操作信号代替拦截下来的操作信号而通过。继而,车辆控制系统vcs根据通过了信号选择部59的操作信号或强制操作信号来控制动作控制部20,由此控制车辆v的动作。
[0043]
通过该构成,当模式设定部56接收到强制控制指示时,可以输出强制模式信号而将信号选择部59设定为强制模式。当非法驾驶者对操作部10进行操作以使车辆v各部动作时,接收到强制控制指示而被设定成强制模式的信号选择部59可以将与操作部10的操作相应的操作信号中的、针对特定的动作控制部20的操作信号拦截而禁用。进而,被设定成强制模式的信号选择部59使从强制操作部58输出的强制操作信号代替已禁用的一部分操作信号而通过。
[0044]
由此,能够代替基于非法驾驶者的操作的操作信号而根据从强制操作部58输出的强制操作信号来控制特定的动作控制部20。因此,操作信号与强制操作信号不会在动作控制部20中发生竞争,所以不会导致动作控制部20的动作不稳定。并且,可以通过特定的动作控制部20使与车辆v的行驶无关的特定部分强制性地动作而不管驾驶者的操作,从而让车辆v的非法驾驶者放弃驾驶。如上所述,根据本实施方式的车辆控制系统vcs,能够安全且强制性地控制车辆v,从而能让非法驾驶者放弃车辆v的驾驶。
[0045]
再者,本实施方式的车辆控制系统vcs也可除了上述构成以外还包含位置检测部40。在该情况下,当车辆控制系统vcs被设定为强制模式时,会从cgw单元50向位置检测部40发送强制模式信号。当位置检测部40从cgw单元50接收到强制模式信号时,将车辆v的位置信息强制性地输出至车辆v外部的数据中心dc。下面,对实现这样的动作的位置检测部40的构成的一例进行说明。
[0046]
图4为表示位置检测部40的构成的一例的框图。位置检测部40例如具有gnss接收机401、输入输出部402、解码器403、强制模式判定部404、位置信息算出部405、计时器406、运算部407、语音控制部408、图像控制部409、地图信息存储部410以及编码器411。
[0047]
位置检测部40例如具有对汽车导航装置附加有ecu的构成,所述ecu具有将车辆v的位置信息输出至外部用的功能。ecu包含输入输出部、中央处理装置(cpu)、rom和ram等存储装置、存储在该存储装置中的数据和程序、以及计时器。即,位置检测部40具备硬件、软件以及固件等。图4所示的位置检测部40的各部例如是由构成位置检测部40的硬件、软件以及固件等实现的表现位置检测部40的功能的功能块。
[0048]
图5为表示图4所示的位置检测部40的动作的一例的流程图。位置检测部40执行经由连接于信息总线b2的输入输出部402而从cgw单元50接收信号的处理p21。接着,位置检测部40执行由解码器403对接收到的信号进行解码并输出至强制模式判定部404的处理p22。接着,强制模式判定部404执行判定从解码器403输入的信号中是否包含强制模式信号的处理p23,并将判定结果输出至位置信息算出部405。
[0049]
当在处理p23中判定强制模式判定部404被输入的信号中不包含强制模式信号(否)时,位置信息算出部405使运算部407执行算出车辆v的位置信息的处理p24。在处理p24中,运算部407根据经由gnss接收机401接收到的gnss给出的车辆v的位置和从地图信息存储部410获取到的地图信息、借助地图匹配部来算出车辆v的位置信息。
[0050]
进而,在处理p25中,运算部407借助行驶状态运算部、路径计算部、路径引导部等
来算出车辆v的路径引导信息,并输出至语音控制部408及图像控制部409。接着,在处理p26中,语音控制部408根据输入的路径引导信息来控制车辆v的扬声器vs而进行语音引导,图像控制部409控制车辆v的显示器vd来显示引导图像。
[0051]
另一方面,当在处理p23中判定强制模式判定部404被输入的信号中包含强制模式信号(是)时,位置信息算出部405执行将位置检测部40设定为强制模式的处理p27。进而,位置信息算出部405执行处理p28,即,借助计时器406来开始将位置检测部40设定成强制模式后的经过时间的测定,并判定是否已经过预先设定的规定时间。当位置信息算出部405在处理p28中判定尚未经过规定时间(否)时,执行由运算部407算出车辆v的位置信息的处理p29。
[0052]
接着,在处理p30中,位置信息算出部405将从运算部407获取到的车辆v的位置信息输出至编码器411。编码器411对从位置信息算出部405输入的车辆v的位置信息进行编码,并经由输入输出部402及信息总线b2输出至通信机30。通信机30将从位置检测部40接收到的车辆v的位置信息经由无线通信线路发送至数据中心dc。
[0053]
其后,根据计时器406的定期的时间间隔的中断来反复执行算出车辆v的位置信息的处理p29和发送车辆v的位置信息的处理p30直至在处理p28中由位置信息算出部405判定已经过规定时间(是)为止。
[0054]
如上所述,本实施方式的车辆控制系统vcs可以还具备检测车辆v的位置的位置检测部40。在该情况下,位置检测部40可以具备算出车辆v的位置信息的位置信息算出部405和判定有无强制模式信号的接收的强制模式判定部404。在强制模式判定部判定了强制模式信号的接收的情况下,位置信息算出部405将车辆v的位置信息经由通信机30发送至车辆v外部。
[0055]
通过这样的构成,在车辆v被非法驾驶者驾驶、车辆控制系统vcs被设定成强制模式的情况下,可以借助位置检测部40将车辆v的位置信息强制性地发送至车辆v外部。结果,车辆v的所有者或正当使用者例如可以借助便携式信息终端pda从数据中心dc获取车辆v的位置信息。由此,能够掌握非法驾驶者抛弃车辆v的位置而容易地收回车辆v。
[0056]
再者,在本实施方式中,作为位置检测部40,对在汽车导航装置中附加有位置输出功能的构成进行了说明,但位置检测部40也可仅具有车辆v的位置的检测功能和检测到的车辆v的位置的强制性输出功能。此外,操作部10所连接的can总线不限定于信息总线b2。具体而言,只要是以下构成即可:操作部10与动作控制部20连接于不同的can总线,从操作部10输出的操作信号在cgw单元50内中继而发送至动作控制部20。此外,本实施方式是使用can总线来进行说明,而在由以太网(注册商标)连接的情况下,cgw单元具有开关的功能,操作部10与动作控制部20无须连接于不同的总线。
[0057]
此外,车辆控制系统vcs在被设定成强制模式后车辆v的起动开关被设为断开的情况下,也可禁用起动开关。此外,车辆控制系统vcs例如也可具备检测部和警报机,所述检测部检测通信机30的断路,所述警报机在该检测部检测到断路时发出警报。由此,当非法驾驶者使通信机30断路时,检测部检测到断路而警报机发出警报,由此能制止非法驾驶者驾驶车辆v。
[0058]
[实施方式2]接着,援用前文所述的实施方式1的图1并参考图6至图8,对本揭示的车辆控制系
统的实施方式2进行说明。图6为表示本揭示的车辆控制系统的实施方式2的框图。图7为图6的车辆控制系统vcs2中包含的动作控制部20的框图。
[0059]
本实施方式的车辆控制系统vcs2与前文所述的实施方式1的车辆控制系统vcs的不同点在于,前文所述的实施方式1中包含在cgw单元50中的模式设定部56和信号选择部59在实施方式2中是包含在动作控制部20中。本实施方式的车辆控制系统vcs2的其他构成与前文所述的实施方式1的车辆控制系统vcs相同,所以对同样的部分标注同一符号并省略说明。
[0060]
如图6所示,在本实施方式的车辆控制系统vcs2中,cgw单元50省略了解码器55、模式设定部56以及信号选择部59。如图7所示,在本实施方式的车辆控制系统vcs2中,作为动作控制部20的车窗控制部21、喇叭控制部22、前灯控制部23以及室内灯控制部24分别具备输入输出部201、解码器202、模式设定部203、信号选择部204以及信号生成部205。
[0061]
动作控制部20例如为ecu,包含输入输出部、中央处理装置(cpu)、rom和ram等存储装置、存储在该存储装置中的数据和程序、以及计时器。即,动作控制部由硬件、软件以及固件等构成。图7所示的动作控制部20的各部例如是由构成动作控制部的硬件、软件以及固件等实现的表现动作控制部的功能的功能块。
[0062]
当本实施方式的cgw单元50的输入输出部51经由通信机30及信息总线b2从车辆v外部接收到强制控制指示的信号时,将接收到的信号输出至目的地决定部54。在本实施方式中,从操作部10输出的操作信号、由通信机30接收的强制控制指示、以及从强制操作部58输出的强制操作信号分别包含固有的can-id作为识别各信号的类别用的识别信息。
[0063]
因此,当输入来自车辆v外部的强制控制指示的信号时,目的地决定部54将强制控制指示的目的地与来自操作部10的操作信号以及来自强制操作部58的强制操作信号的目的地一同设定为车身总线b1。输入输出部51将已设定目的地的强制控制指示、操作信号以及强制操作信号输出至车身总线b1。
[0064]
图8为表示图7的动作控制部20的动作的一例的流程图。首先,动作控制部20执行由输入输出部201从车身总线b1接收信号的处理p31和由解码器202对接收到的信号进行解码的处理p32。进而,解码器202执行根据各信号中包含的识别信息即can-id来判定接收到的信号中是否包含强制控制指示的处理p33。
[0065]
当解码器202在处理p33中判定不包含强制控制指示(否)时,将操作信号和强制操作信号输出至信号选择部204。信号选择部204相当于前文所述的实施方式1中的选择器53,在从模式设定部203接收到强制模式信号前的正常模式下,执行使所有操作信号通过、拦截所有强制操作信号的处理p34。
[0066]
接着,在处理p35中,信号生成部205根据通过了信号选择部204的操作信号来生成控制信号。接着,在处理p36中,输入输出部201将信号生成部205所生成的控制信号输出至各动作控制部20所控制的车辆v各部的执行器或电子电路。由此,在cgw单元50接收到强制控制指示前,根据与车辆v的驾驶者对操作部10的操作相应的操作信号来控制包括车窗等的车辆v的特定部分,根据驾驶者的操作进行动作。
[0067]
另一方面,当动作控制部20接收到强制控制指示时,在处理p33中,解码器202判定包含强制控制指示(是),将强制控制指示输出至模式设定部203。当模式设定部203从解码器202接收到强制控制指示时,执行将强制模式信号输出至信号选择部204而将动作控制部
20设定为强制模式的处理p37。
[0068]
接收到强制模式信号而被设定成强制模式的信号选择部204执行拦截操作信号的至少一部分并且使强制操作信号代替拦截下来的操作信号而通过的处理p38。此处,与前文所述的实施方式1的信号选择部59一样,信号选择部204所拦截的操作信号是针对与车辆v的行驶无关的包括车窗、喇叭、前灯、室内灯等的车辆v的特定部分的执行器或电子电路的操作信号。
[0069]
接着,在处理p35中,信号生成部205根据通过了信号选择部204的操作信号和强制操作信号来生成控制信号。接着,在处理p36中,输入输出部201将信号生成部205所生成的控制信号输出至各动作控制部20所控制的车辆v各部的执行器或电子电路。由此,在cgw单元50接收到强制控制指示后,包括车窗、喇叭、前灯、室内灯等的车辆v的特定部分强制性地进行特定动作而不管车辆v的驾驶者对操作部10的操作。
[0070]
如上所述,本实施方式的车辆控制系统vcs2还具备图7所示的动作控制部20。此外,在本实施方式的车辆控制系统vcs2中,动作控制部20包含模式设定部203和信号选择部204。信号选择部204在强制模式信号的接收前使所有操作信号通过,并且拦截所有所述强制操作信号。此外,信号选择部204在强制模式信号的接收后拦截操作信号的至少一部分,并且使强制操作信号代替拦截下来的操作信号而通过。
[0071]
通过该构成,本实施方式的车辆控制系统vcs2能够取得与前文所述的实施方式1的车辆控制系统vcs同样的效果。此外,根据本实施方式的车辆控制系统vcs2,与前文所述的实施方式1的车辆控制系统vcs相比,能够简化cgw单元50的构成。此外,与实施方式1的车辆控制系统vcs一样,对各动作控制部20的强制操作指示的包从cgw单元50依序输出,所以能使车辆v的特定部分以预先定下的顺序进行动作。
[0072]
此外,在本实施方式的车辆控制系统vcs2中,操作信号、强制控制指示以及强制操作信号分别包含用于识别信号的类别的识别信息。由此,动作控制部20可以根据接收到的信号中包含的can-id等识别信息来判定强制控制指示的接收而使模式设定部203输出强制模式信号。此外,可以借助信号选择部204使操作信号或强制操作信号选择性地通过。
[0073]
[实施方式3]接着,援用前文所述的实施方式1的图1和实施方式2的图6并参考图9及图10,对本揭示的车辆控制系统的实施方式3进行说明。图9为本揭示的车辆控制系统的实施方式3中包含的动作控制部20的框图。
[0074]
本实施方式的车辆控制系统与前文所述的实施方式2的车辆控制系统vcs2的不同点在于,cgw单元50中省略了存储部57及强制操作部58,动作控制部20具有存储部206及强制操作部207。再者,本实施方式的存储部206及强制操作部207的构成与实施方式1及2的存储部57及强制操作部58相同。本实施方式的车辆控制系统的其他方面与前文所述的实施方式2的车辆控制系统vcs2相同,所以对同样的部分标注同一符号并省略说明。
[0075]
当本实施方式的cgw单元50的输入输出部51经由通信机30及信息总线b2从车辆v外部接收到强制控制指示的信号时,将接收到的信号输出至目的地决定部54。当输入来自车辆v外部的强制控制指示的信号时,目的地决定部54将强制控制指示的目的地与来自操作部10的操作信号的目的地一同设定为车身总线b1。输入输出部51将已设定目的地的操作信号及强制操作指示输出至车身总线b1。
[0076]
图10为表示图9的动作控制部20的动作的一例的流程图。首先,动作控制部20执行由输入输出部201从车身总线b1接收信号的处理p41和由解码器202对接收到的信号进行解码的处理p42。进而,解码器202执行根据各信号中包含的识别信息即can-id来判定接收到的信号中是否包含强制控制指示的处理p43。
[0077]
当解码器202在处理p43中判定不包含强制控制指示(否)时,将操作信号输出至信号选择部204。信号选择部204相当于前文所述的实施方式1中的选择器53,在从模式设定部203接收到强制模式信号前,执行使所有操作信号通过的处理p44。其后的处理p45及处理p46与前文所述的实施方式2的处理p35及处理p36相同。
[0078]
另一方面,当动作控制部20接收到强制控制指示时,解码器202在处理p43中判定包含强制控制指示(是),将强制控制指示输出至模式设定部203。当模式设定部203从解码器202接收到强制控制指示时,执行将强制模式信号输出至信号选择部204及强制操作部207而将动作控制部20设定为强制模式的处理p47。
[0079]
接收到强制模式信号而被设定成强制模式的强制操作部207执行从存储部206读出强制操作信号并输出至信号选择部204的处理p48。接收到强制模式信号而被设定成强制模式的信号选择部204执行拦截操作信号的至少一部分并且使强制操作信号代替拦截下来的操作信号而通过的处理p49。
[0080]
此处,与前文所述的实施方式1的信号选择部59一样,信号选择部204所拦截的操作信号是针对与车辆v的行驶无关的包括车窗、喇叭、前灯、室内灯等的车辆v的特定部分的执行器或电子电路的操作信号。其后的处理p45及处理p46与前文所述的实施方式2的处理p35及处理p36相同。
[0081]
如上所述,在本实施方式的车辆控制系统中,动作控制部20除了图7所示的实施方式2的构成以外还包含强制操作部207。因而,根据本实施方式的车辆控制系统,不仅能取得与前文所述的实施方式1的车辆控制系统vcs以及实施方式2的车辆控制系统vcs2同样的效果,还不再需要cgw单元50内的强制操作部58和存储部57,所以能进一步简化cgw单元50的构成。此外,构成各动作控制部20的存储部206的闪存的容量等也能进一步减小。
[0082]
[实施方式4]接着,援用前文所述的实施方式1的图1并参考图11及图12,对本揭示的车辆控制系统的实施方式4进行说明。图11为本揭示的车辆控制系统的实施方式4的框图。
[0083]
本实施方式的车辆控制系统vcs4中,cgw单元50上还连接有动力系总线b3,动力系总线b3上连接有根据操作信号来控制车辆v的动作的动作控制部60。此外,cgw单元50具备行驶状态判定部5x,并且具有多个存储部57a、57b。此外,强制操作部58包含选择器。本实施方式的车辆控制系统vcs4的其他构成与实施方式1的车辆控制系统vcs相同,所以对同样的部分标注同一符号并省略说明。
[0084]
动作控制部60基于根据车辆v的驾驶者对操作部10的操作而输出的操作信号来控制车辆v的加减速、恒速行驶、制动、前进道路变更等车辆v的行驶有关的动作。此处,操作部10例如包括加速踏板、制动踏板以及方向盘等。
[0085]
动作控制部60例如包括制动控制部61、加速控制部62以及操舵控制部63。制动控制部61例如是对操作车辆v的制动器的执行器进行控制的ecu。加速控制部62例如是对操作车辆v的节气门的执行器或者车辆v的驱动马达进行控制的ecu。操舵控制部63例如是控制
车辆v的操舵执行器的ecu。
[0086]
cgw单元50的多个存储部57a、57b中包括的第1存储部57a中存储有与车辆v的行驶无关的第1强制操作信号。第1强制操作信号是用于对使车窗、喇叭、前灯以及室内灯等与车辆v的行驶无关的部分动作的动作控制部20进行控制的信号。
[0087]
此外,cgw单元50的多个存储部57a、57b中包括的第2存储部57b中存储有与车辆v的行驶有关的第2强制操作信号。第2强制操作信号是用于对使制动器、加速机构、操舵机构等与车辆v的行驶有关的部分动作的动作控制部60进行控制的信号。第2强制操作信号例如可以包括不起动发动机或驱动马达的信号、不解除驻车制动器的信号、将加速机构的操作量设为零的信号、将操舵角设为零的信号、使助力转向不工作的信号等。
[0088]
行驶状态判定部5x例如根据连接于信息总线b2的速度传感器、加速度传感器、角加速度传感器、位置检测部40等搭载于车辆v中的传感器的输出来判定车辆v的行驶状态。更具体而言,行驶状态判定部5x例如判定车辆v是正在行驶还是停止不动。行驶状态判定部5x将车辆v的行驶状态的判定结果例如输出至强制操作部58的选择器和信号选择部59的包分离部52。
[0089]
图12为表示图11的车辆控制系统vcs4的动作的一例的流程图。车辆控制系统vcs首先执行判定有无强制控制指示的处理p51。具体而言,由cgw单元50的输入输出部51从信息总线b2接收信号并输出至解码器55。解码器55对从输入输出部51输入的信号进行解码,并判定解码后的信号中是否包含强制控制指示。
[0090]
当在处理p51中由解码器55判定不包含强制控制指示(否)时,cgw单元50维持正常模式。在该情况下,cgw单元50执行与图3所示的实施方式1的车辆控制系统vcs的正常模式下的处理p11、p12、p14、p15同样的处理p52、p53、p54、p55。
[0091]
另一方面,当在处理p51中由解码器55判定包含强制控制指示(是)时,解码器55将强制控制指示输出至模式设定部56。当模式设定部56从解码器55接收到强制控制指示时,执行将强制模式信号输出至强制操作部58和信号选择部59的选择器53而将cgw单元50设定为强制模式的处理p56。此外,解码器55将解码后的信号中的检测车辆v的行驶状态的传感器的检测结果输出至行驶状态判定部5x。
[0092]
接着,cgw单元50执行判定车辆v的行驶状态的处理p57。在该处理p57中,行驶状态判定部5x根据从解码器55输入的传感器的检测结果来判定车辆v的行驶状态是否为规定行驶状态。作为规定行驶状态,例如可以例示车辆v的速度为零的状态也就是车辆v停止不动的状态。
[0093]
当行驶状态判定部5x在处理p57中例如判定车辆v正在行驶、车辆v的行驶状态并非规定行驶状态(否)时,将该判定结果输出至强制操作部58和信号选择部59的包分离部52。在该情况下,cgw单元50执行与图3所示的实施方式1的车辆控制系统vcs被设定成强制模式的情况下的处理p11、p12、p17、p18同样的处理p58、p59、p60、p61。
[0094]
另一方面,当行驶状态判定部5x在处理p57中例如判定车辆v停止不动、车辆v的行驶状态为规定行驶状态(是)时,将该判定结果输出至强制操作部58和信号选择部59的包分离部52。于是,包分离部52执行将经由输入输出部51输入的基于车辆v的驾驶者对操作部10的操作的操作信号当中与车辆v的行驶有关的操作信号分离并输出至选择器53的处理p62。
[0095]
进而,包分离部52执行将输出到选择器53的操作信号以外的其他操作信号输出至
目的地决定部54来设定目的地并经由输入输出部51输出至车身总线b1、信息总线b2的处理p63。接着,强制操作部58执行由被设定成强制模式的强制操作部58读出第2存储部57b中存储的第2强制操作信号并输出至选择器53的处理p64。该第2强制操作信号是针对控制车辆v的行驶有关的动作的动作控制部60的强制操作信号。
[0096]
接着,接收到强制模式信号而被设定成强制模式的选择器53执行拦截从包分离部52输入的操作信号并使从强制操作部58输入的第2强制操作信号通过的处理p65。其后,cgw单元50执行由目的地决定部54及输入输出部51将通过了选择器53的第2强制操作信号输出至动作控制部60的处理p55。
[0097]
如上所述,本实施方式的车辆控制系统vcs4进而具备判定车辆v的行驶状态的行驶状态判定部5x。此外,当由行驶状态判定部5x判定车辆v正在行驶时,强制操作部58输出与车辆v的行驶无关的第1强制操作信号,当由行驶状态判定部5x判定车辆v停止不动时,强制操作部58输出车辆v的行驶有关的第2强制操作信号。
[0098]
通过这样的构成,在车辆v正在行驶的情况下,本实施方式的车辆控制系统vcs4能够取得与前文所述的实施方式1的车辆控制系统vcs同样的效果。此外,在车辆v停止不动的情况下,本实施方式的车辆控制系统vcs4可以将基于车辆v的驾驶者对操作部10的操作的操作信号当中与车辆v的行驶有关的操作信号禁用。
[0099]
进而,本实施方式的车辆控制系统vcs可以将车辆v的行驶有关的第2强制操作信号代替已禁用的操作信号而经由动力系总线b3输出至动作控制部60。由此,例如在车辆v处于安全状态的停止时,可以阻止车辆v的非法驾驶者对发动机或驱动马达的起动、驻车制动器的解除、加速操作以及转向操作等。
[0100]
[实施方式5]接着,援用前文所述的实施方式1的图1及图4并参考图13,对本揭示的车辆控制系统的实施方式5进行说明。图13为本揭示的车辆控制系统的实施方式5的框图。
[0101]
本实施方式的车辆控制系统vcs5中,cgw单元50具备外部认证部5y,强制操作部58具备加密部58a。此外,连接于车身总线b1的各动作控制部20和连接于信息总线b2的位置检测部40分别具有作为can认证部的内部认证部21y、22y、23y、24y、40y。本实施方式的车辆控制系统vcs5的其他构成与前文所述的实施方式1的车辆控制系统vcs相同,所以对同样的部分标注同一符号并省略说明。
[0102]
在本实施方式的车辆控制系统vcs5中,用于将车辆控制系统vcs5设定为强制模式的强制控制指示从车辆v外部的数据中心dc以加密方式加以发送。cgw单元50的外部认证部5y对输入输出部51经由通信机30及信息总线b2而接收到的加密后的强制控制指示进行认证并输出至解码器55。
[0103]
此外,cgw单元50被设定成强制模式时从强制操作部58输出的强制操作信号由加密部58a进行加密。当动作控制部20经由车身总线b1及输入输出部21x、22x、23x、24x而接收到加密后的强制操作信号时,由内部认证部21y、22y、23y、24y对强制操作信号进行认证。
[0104]
同样地,当位置检测部40经由信息总线b2及输入输出部402而接收到加密后的强制控制指示时,由内部认证部40y进行认证并输出至解码器403。本实施方式的车辆控制系统vcs的其他动作与前文所述的实施方式1的车辆控制系统vcs的动作相同。
[0105]
如上所述,本实施方式的车辆控制系统vcs5除了前文所述的实施方式1的车辆控
制系统vcs的构成以外还具备对加密后的强制控制指示进行认证的外部认证部5y和对强制操作信号进行加密的加密部58a。此外,动作控制部20包含对加密后的强制操作信号进行认证的内部认证部。
[0106]
通过这样的构成,本实施方式的车辆控制系统vcs5不仅能取得与前文所述的实施方式1的车辆控制系统vcs同样的效果,还能提高车辆控制系统vcs5的安全性。更具体而言,本实施方式的车辆控制系统vcs5对车辆v外部与cgw单元50及位置检测部40之间的强制控制指令进行加密,由此能提高安全性能。
[0107]
另外,本实施方式的车辆控制系统vcs5具有对从cgw单元50到动作控制部20的强制操作信号进行加密的两级安全功能。由此,不仅是在车辆v外部与cgw单元50之间,在cgw单元50与动作控制部20之间也能防止第三者的恶意伪装或篡改而提高车辆控制系统vcs5的安全性。
[0108]
[实施方式6]接着,援用前文所述的实施方式1的图1及图4并参考图14,对本揭示的车辆控制系统的实施方式6进行说明。图14为本揭示的车辆控制系统的实施方式6的框图。再者,对与前文所述的各实施方式中的构成同样的构成标注同一符号并省略说明。
[0109]
本实施方式的车辆控制系统vcs6具备集中ecu 70代替前文所述的实施方式中的cgw单元50。集中ecu 70具有车辆控制部78,所述车辆控制部78不仅具备车身总线b1、信息总线b2以及动力系总线b3之间的中继功能,还具备自动驾驶(ad)及高级驾驶辅助(adas)等功能。
[0110]
集中ecu 70具备输入输出部71、解码器72、模式设定部73、信号选择部74、目的地决定部75、存储部76(76a、76b)、强制操作部77以及车辆控制部78。输入输出部71经由网关gw而连接于车身总线b1、信息总线b2以及动力系总线b3。
[0111]
输入输出部71将经由网关gw而输入的信号输出至解码器72。解码器72对从输入输出部71输入的信号进行解码并输出至信号选择部74和模式设定部73。当模式设定部73经由通信机30、信息总线b2、网关gw、输入输出部71以及解码器72而从车辆v外部接收到强制控制指示时,对强制操作部77和信号选择部74输出强制模式信号。
[0112]
当强制操作部77从模式设定部73接收到强制模式信号时,读出存储部76中存储的强制操作信号并输出至信号选择部74。此处,强制操作信号是让动作控制部20或动作控制部60使车辆v强制性地动作用的信号。
[0113]
车辆控制部78例如具备识别外界信息的识别部78a、将识别部78a所识别出的外界信息加以统合的统合部78b、以及根据由统合部78b统合后的外界信息来判断车辆v的行驶状况和周围状况的判断部78c。此外,车辆控制部78具备根据车辆v的行驶状况和周围状况来生成对车辆v的动作控制部60进行控制的车辆控制信号并输出至信号选择部74的控制信号生成部78d。
[0114]
信号选择部74在强制模式信号的接收前使所有操作信号及车辆控制信号通过。此外,信号选择部74在强制模式信号的接收后拦截操作信号及车辆控制信号的至少一部分,并且使强制操作信号代替拦截下来的操作信号及车辆控制信号而通往目的地决定部75。
[0115]
目的地决定部75对从信号选择部74输入的操作信号、车辆控制信号以及强制操作信号赋予目的地,并输出至车身总线b1、信息总线b2或者动力系总线b3。集中ecu 70根据通
过了信号选择部74的操作信号及控制信号或强制操作信号来控制动作控制部20及动作控制部60,由此控制车辆v的动作。
[0116]
如上所述,本实施方式的车辆控制系统vcs6进而具备车辆控制部78,所述车辆控制部78识别车辆v周围的外界信息,并且根据该外界信息来生成用于控制动作控制部60的车辆控制信号。信号选择部74在强制模式信号的接收后根据外界信息而使操作信号、强制操作信号或者车辆控制信号通过。
[0117]
通过该构成,本实施方式的车辆控制系统vcs能够取得与前文所述的实施方式1的车辆控制系统vcs同样的效果。此外,根据本实施方式的车辆控制系统vcs6,可以通过使用由车辆控制部78识别出的车辆v的行驶状况及外界信息来取得与前文所述的实施方式4的车辆控制系统vcs4同样的效果。
[0118]
以上,使用附图对本揭示的车辆控制系统的实施方式进行了详细叙述,但具体构成并不限定于该实施方式,即便有不脱离本揭示的主旨的范围内的设计变更等,它们也包含在本揭示内。符号说明
[0119]
10
…
操作部20
…
动作控制部203
…
模式设定部204
…
信号选择部207
…
强制操作部21
…
车窗控制部(动作控制部)21y
…
内部认证部22
…
喇叭控制部(动作控制部)22y
…
内部认证部23
…
前灯控制部(动作控制部)23y
…
内部认证部24
…
室内灯控制部(动作控制部)24y
…
内部认证部30
…
通信机40
…
位置检测部404
…
强制模式判定部405
…
位置信息算出部40y
…
内部认证部52
…
包分离部(信号选择部)53
…
选择器(信号选择部)56
…
模式设定部58
…
强制操作部58a
…
加密部59
…
信号选择部5x
…
行驶状态判定部
5y
…
外部认证部60
…
动作控制部61
…
制动控制部(动作控制部)62
…
加速控制部(动作控制部)63
…
操舵控制部(动作控制部)73
…
模式设定部74
…
信号选择部77
…
强制操作部78
…
车辆控制部v
…
车辆vcs
…
车辆控制系统vcs2
…
车辆控制系统vcs4
…
车辆控制系统vcs5
…
车辆控制系统vcs6
…
车辆控制系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1