用于保持双轮辙的机动车的方法与流程
1.本发明涉及一种按照权利要求1所述的用于尤其是在倾斜的面上保持双轮辙的机动车的方法。对于现有技术示例性地参阅de 10 2017113 016a1、de 10 2012 223 867 a1以及de 10 2012 223 866 a1。
背景技术:
2.尤其是具有内燃机驱动装置的机动车的已知的保持功能(例如所谓的“自动驻车(autohold)功能”、“坡道辅助(hill-assist)”或所谓的b保持功能)借助行车制动器保持车辆,尤其是在倾斜的面上。
3.在具有电驱动系统的机动车中,驱动电机能够将电机扭矩施加到传动系中。为了尤其是在车辆在倾斜的面上停住时使车辆在制动后通过该驱动电机不回退,按常规必须根据倾斜的情况操纵行车制动器。这样的制动和保持设计例如由de 10 2017 113 016 a1已知。
4.在用于电动车的当前的设计中,在放开加速踏板时设置有强烈突出的推力减速,直到停车状态,其中调节驱动电机的对应高的回收扭矩,从而使得驾驶员通过操纵加速踏板不仅可以加速而且在放开加速踏板时可以提供所希望的减速。这引起所谓的“单踏板感觉(one-pedal-feeling)”,即,能够仅仅以加速踏板控制车辆的感觉。通过所述“单踏板感觉”,显著减少对制动踏板的使用。
5.在该设计中,所述电动车区别于典型的自动车辆也不具有蠕行(creep),即,机动车在平的没有斜度的面上,在挂入配置给车辆前进方向的行驶速度级(典型地称为d行驶速度级;d-drive)的情况下不沿前进方向运动;对应的情况适用于向后方向。机动车的蠕行与“单踏板感觉”难以协调一致,因为这例如要求经常操纵制动踏板,以便阻止车辆的蠕行。
6.由de 10 2012 223 867 a1和de 10 2012 223 866 a1还已知,具有电驱动系统的车辆通过电驱动系统利用电机扭矩,以便尤其是在倾斜的面上进一步保持已经处于静止状态中的车辆。根据行车道的坡度和车辆保持在静止状态中的时间长度,驱动电机的有效功率迟早消减。然后(例如在确定的时间之后),驱动电机的电动机驱动的保持力矩消减并且一个备选的保持系统(尤其是行车制动器)接管并且将车辆保持在静止状态中。
7.然而,在所述现有技术中不利的是,在从通过驱动电机由电动机驱动的保持到通过行车制动器的保持的过渡中,尤其是由于在行车制动器接管期间或行车制动器激活期间驱动电机的电机扭矩的消减,产生对于乘员而言不合意的并且不舒服的噪声和振动。因为为了使车辆继续可靠地保持在静止状态中,必须同时进行从驱动端的保持到通过行车制动器的保持的过渡。尤其是车辆乘员通过吱嘎噪声感受到这样的振动。
技术实现要素:
8.因此本发明的任务是,在对于乘员的舒适性方面,改善用于将双轮辙的机动车保持在静止状态中的方法。
9.该任务的解决方案通过具有权利要求1的特征的用于保持双轮辙的机动车的方法得出。有利的构型和扩展方案是从属权利要求的内容。
10.在本技术的意义中,概念“具有驱动电机的机动车”优选不仅包括能够通过外部的电能供应充电的带有可选的内燃机增程器的电动车而且包括具有一个内燃机和一个(或多个)驱动电机的混合动力车辆。
11.在示例性的第一实施方式中,机动车包括两个驱动电机,一个用于驱动在前桥上的车轮,并且一个用于驱动在后桥上的车轮。
12.在另一种示例性的实施方式中,机动车包括四个车轮特定的驱动电机,所述驱动电机尤其是作为所谓的轮毂电机已知。在具有车轮特定的驱动电机的这样的情况中,通过配置给每个车轮的驱动电机,每个车轮能够单独驱动。
13.如在开头已经提到的那样,双轮辙的机动车在此包括至少一个(优选至少两个)驱动电机。如果机动车例如只包括一个唯一的驱动电机,则优选设置,该驱动电机只驱动一个车桥的车轮,亦即前桥的车轮或后桥的车轮。
14.所述双轮辙的机动车还包括至少四个车轮,其中这些车轮中的每个车轮能够通过行车制动器被保持或者说确保不被旋转。所述行车制动器可例如是能够电、电液压、电机械或液压地操纵的制动装置。特别优选在此涉及具有“单踏板感觉”的电动车的开头所述的设计。
15.在机动车(简称“车辆”)的初始位置中,车辆处于静止状态中,其中,通过施加所述至少一个驱动电机的电机扭矩来保持车辆。
16.在仅有一个唯一的驱动电机的情况中优选设置,一个车桥的车轮通过该唯一的驱动电机的电机扭矩保持,而另一个车桥的车轮可通过常规的行车制动器保持。
17.还可行的是,通过施加行车制动和同时通过施加通过驱动电机的电机扭矩将车辆保持在静止状态中。
18.在开头所述具有两个驱动电机(例如一个用于驱动前桥的车轮并且一个用于驱动后桥的车轮)的实施方式的情况中,优选设置,在初始位置中通过驱动电机的电机扭矩(并且必要时附加地通过相应的行车制动器)保持该车辆的所有车轮或者说确保该车辆的所有车轮不被滚动或者说旋转。
19.同样在开头所述具有(四个)车轮特定的驱动电机的实施方式的情况中优选设置,在初始位置中,通过相应的驱动电机的电机扭矩保持所有四个车轮或者说确保所有四个车轮不被滚动或者说旋转。
20.特别优选地,机动车在初始位置中处于有坡度的倾斜的面或者说行车道上,亦即例如在斜坡上。
21.在下一个步骤中设置,尤其是与情况和/或与坡度和/或与时间相关地在机动车的仅仅一个车轮或最多两个车轮上消减用于将车辆保持在初始位置中的电机扭矩。
22.在产生用于保持车辆的两个车轮的扭矩的唯一的驱动电机的情况中,优选设置,消减在这两个车轮上的扭矩。然而同时设置,通过行车制动器保持另外两个车轮。
23.尤其是在两个或更多个驱动电机的情况中优选设置,首先在仅一个唯一的车轮上消减驱动电机的电机扭矩,而在通过驱动电机的电机扭矩保持的其他车轮上不发生这样的消减。
24.由此可以确保,在仅一个唯一的车轮(或最多两个车轮)上的电机扭矩消减的期间,继续通过优选在另外的车轮上施加的电机扭矩保持该车辆并且阻止车辆的不期望的运动。
25.在所述一个车轮(或者说所述最多两个车轮)上的驱动电机的扭矩消减在此优选完全地进行,亦即进行直到不再有电机扭矩施加在该车轮上,亦即基本上消减到0nm。
26.在相应的一个车轮/相应的多个车轮上的驱动电机的电机扭矩消减的持续时间期间,优选设置,在该车轮/这些车轮上没有相车轮的行车制动器的行车制动力矩在其上施加。换句话说,设置,在驱动电机的电机扭矩消减期间相应车轮的行车制动器是未激活的或者说是断开的。
27.在机动车的所述一个车轮或所述最多两个车轮上的电机扭矩的(优选完全的)消减之后设置,行车制动器接管相应车轮的保持。
28.亦即例如如果电机扭矩在所述唯一的车轮上完全消减,则在该车轮上的行车制动器直到电机扭矩完全消减还是断开的,亦即还没有激活。车辆的滚走则通过另外车轮的扭转止动、尤其是通过施加驱动电机的电机扭矩来阻止。在该示例中然后在电机扭矩完全消减之后,激活在该车轮上的行车制动器,从而该被保持的车轮也又有助于保持该车辆。
29.通过在电机扭矩的(优选完全的)消减期间不激活所述行车制动器,而是在扭矩消减之后才激活行车制动器,不会产生所述的不利的吱嘎噪声。通过保持所述另外的车轮来补偿时间缺口(在所述时间缺口中不再确保发生所述消减的相应车轮不会滚动,直到行车制动器然后实际上起作用),从而确保车辆不会滚走。
30.如已经提到的,优选设置,与情况和/或与时间和/或与坡度相关地消减在相应车轮上的驱动电机的电机扭矩。这样的消减例如可依赖于车辆在静止状态中的可预见的保持持续时间(例如由于已知的交通灯切换持续时间或可预见的堵车停留持续时间或类似情况)进行。替代地或附加地,在相应的车轮上的电机扭矩的所述消减也可依赖于要保持的车辆所处于的行车道的相应坡度。如果车辆例如处于平的行车道上(这可以通过不同的传感器或数据确定),则电机扭矩的所述消减可能非常晚才进行或完全不进行,因为驱动电机从能量的角度来看本身能够通过将电机扭矩施加在相应车轮上将车辆保持在初始位置中并且在长的时间段上保持在该位置中。如果与之不同地确定车辆保持在具有较强坡度的行车道上,在所述行车道中,驱动电机出于能量方面的原因只可以在确定的时间段中通过所述电机扭矩保证车辆保持,则可设置,在较短的时间之后就进行在相应车轮上的电机扭矩的上述消减。
31.替代地或附加地,此外可与时间相关地进行电机扭矩的消减。亦即如果例如记录了车辆在初始位置(通过驱动电机的电机扭矩的车辆的保持位置)中的预定的停留持续时间,则可以消减在相应车轮上的电机扭矩。
32.替代地或附加地,可依赖于所检测的驱动电机的有效功率进行所述消减。
33.现在,在车辆的一个第一车轮(或最多两个车轮)中进行了从通过驱动电机的电机扭矩的由驱动装置决定的保持到通过行车制动器的由制动器决定的保持的变换或者说过渡之后,设置,现在重复地在另外的车轮中实施这些方法步骤,所述另外的车轮通过驱动电机的电机扭矩保持。
34.亦即设置,(又优选与情况和/或与时间和/或与坡度相关地)在激活在所述一个车
轮(或最多两个车轮)上的行车制动器之后,消减在车辆的另一个车轮上的驱动电机的电机扭矩。该消减也在此优选又完全地进行,亦即直到施加的扭矩基本上达到0nm。接着在该另一个车轮上的扭矩的所述消减之后,在该另一个车轮上激活行车制动器。
35.这两个方法步骤(在相应的车轮上的“电机扭矩的消减”和随后的“行车制动器的激活”)优选与情况或者说时间或者说坡度相关地,因此依次或者说顺序地在每个车轮上进行,所述车轮通过驱动电机的电机扭矩保持在车辆的初始位置中。
36.在相应车轮上的这两个方法步骤的过程期间,相应的另外的车轮在此要么通过已经激活的行车制动器要么通过驱动电机的还存在的电机扭矩负责车辆的保持。
37.亦即在一个车轮上的驱动电机的电机扭矩发生消减期间,行车制动器优选不在车辆的车轮上起作用。由此可以有利地避免以上所述的在从通过驱动电机的保持到通过行车制动器的保持的过渡期间的吱嘎噪声。由此确保车辆的舒适的并且噪声减小的保持特性。
38.在本发明的一种优选的实施方式中,与情况或者说与坡度相关地实施所要求保护的方法。亦即在车辆处于所述初始位置(保持位置)期间,如果达到行车道的确定的坡度,则设置实施所述方法。替代地或附加地可以在如下情况中实施所述方法,即,除了所述坡度之外检测到,驱动电机的有效功率不再足够单独将车辆在确定的持续时间内保持在保持位置中,或检测到,由于可预见的或达到的保持持续时间在能量方面不再适合通过驱动电机的电机扭矩保持车辆。
39.除了所述方法之外,还提出一种机动车,其能够实现所述方法的实施。如已经提到的,机动车在此包括至少一个驱动电机和至少四个车轮。在此,通过用于保持车轮的行车制动器或者说通过扭转止动的固定能够保持四个车轮中的每个车轮。
40.这些和另外的特征除了由权利要求和由说明书得出之外也由附图得出,其中各个特征分别本身单独或多个地以子组合的形式在本发明的实施形式中实现并且构成有利的以及本身可保护的实施方式,对于所述的实施方式在这里要求权利保护。
具体实施方式
41.接着借助实施例进一步解释本发明。在此所有详细说明的特征对于本发明是重要的。
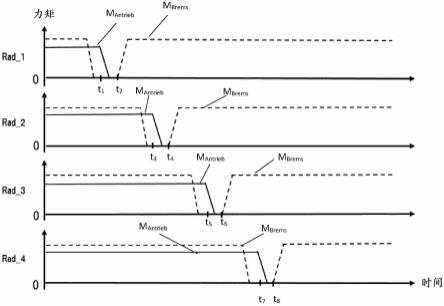
42.示出的图表在此示意性地显示具有四个车轮(rad_1;rad_2;rad_3、rad_4)的机动车关于时间的力矩变化过程(保持或制动力矩变化过程)的实施例。在此,每个车轮(rad_1;rad_2;rad_3、rad_4)具有行车制动器,所述行车制动器能够将制动力矩或者说行车制动力矩m
brems
(虚线)施加在相应的车轮上。在每个车轮上还可单独施加驱动电机的电机扭矩m
antrieb
(实线)。在此,尤其是为每个车轮单独分别设置一个例如以轮毂电动机为形式的驱动电机。
43.在初始位置中,车辆处于保持位置中,尤其是在斜坡上。所述车辆直到时刻t1通过施加驱动电机的电机扭矩m
antrieb
保持,所述电机扭矩施加在车辆所有四个车轮rad_1、rad_2;rad_3、rad_4上。附加地、但不是限制性地,在该具体的情况中通过在所有四个车轮rad_1、rad_2;rad_3、rad_4上施加行车制动来保持车辆。然而也可设想的是,单独地通过将电机扭矩m
antrieb
施加在每个车轮上将车辆保持在静止状态中。通过具有开头所述的“单踏板感觉”的车辆设计,车辆通过相应的车轮特定的驱动电机的在每个车轮上施加的电机扭矩mantrieb
保持在静止状态中。
44.例如所述车辆可处于红色交通灯和具有坡度的道路处。
45.直至达到静止状态的制动过程在此优选也通过相应的驱动电机实现(参考上述“单踏板感觉”设计)。如已经提到的,还可在借助驱动电机保持车辆的同时,通过将行车制动力矩m
brems
施加到车轮上激活行车制动器。
46.如果现在(在时刻t1)例如通过传感机构、通过导航数据、通过在线数据、通过车辆数据或类似物检测到由于行车道的过高坡度或由于车辆在保持位置中的可预见的或者说已经进行的过长停留持续时间导致驱动电机的有效功率低或在能量方面不适合的调设,则设置,行车制动器通过将对应的制动力矩m
brems
施加在相应的车轮上确保并且接管该车辆的保持位置。
47.区别于现有技术,行车制动器则不是同时地且全面地与在每个车轮上仍然施加的电机扭矩m
antrieb
一起被激活的,而是当在相应的车轮上的电机扭矩已经完全消减时顺序地在每个车轮上依次形成。
48.如果行车制动器之前在车辆保持在静止状态中时已经被激活,则该行车制动器在时刻t1之前在第一车轮rad_1上完全断开行车制动器,从而不再有行车制动力矩m
brems
在时刻t1施加在第一车轮rad_1上。
49.在时刻t1,然后该车辆的第一车轮rad_1的电机扭矩m
antrieb
减小到0nm。在时刻t2,当第一车轮的驱动电机的电机扭矩m
antrieb
完全消减时,才通过行车制动器的形成的制动力矩m
brems
激活到该第一车轮上的行车制动。在第一车轮上的电机扭矩m
antrieb
开始消减的时刻和行车制动力矩m
brems
的完全形成之间在第一车轮上产生的制动不足可通过仍然在另外三个车轮rad_2、rad_3、rad_4上施加的制动力矩m
brems
或者说m
antrieb
补偿或者说弥补。这样在所述另外三个车轮rad_2;rad_3、rad_4上的保持力矩m
brems
或者说m
antrieb
足够高,以便将车辆保持在保持位置中。由于在第一车轮rad_1上的电机扭矩m
antrieb
的完全消减,而在此期间第一车轮rad_1的行车制动器断开或未激活,可有利地避免不舒服的噪声生成。
50.在下一个步骤中,在时刻t3,当第一车轮rad_1的行车制动力矩m
brems
已经完全形成并且完全接管了第一车轮的保持时,在第二车轮rad_2上,第二车轮rad_2的驱动电机的电机扭矩m
antrieb
消减直到0nm。在此,又必须保证,在第二车轮rad_2上的电机扭矩m
antrieb
消减的时刻t3,在第二车轮上的行车制动器不再被激活(亦即断开)。在第二车轮rad_2的驱动电机的电机扭矩m
antrieb
完全消减之后,在时刻t4,通过行车制动器的行车制动力矩m
brems
的形成激活在第二车轮rad_2上的行车制动。第二车轮rad_2的行车制动器然后接管第二车轮的保持。
51.随后,如在图中可看出的,对另外的两个车轮rad_3和rad_4实施相同的方法步骤。在第二车轮rad_2上的行车制动力矩m
brems
完全形成之后并且在保证第三车轮rad_3的行车制动器被解除激活状态的情况下,在时刻t5,第三车轮rad_3的电机制动力矩m
antrieb
消减直到0nm。随后从在第三车轮rad_3上的电机扭矩m
antrieb
完全消减开始,在时刻t6,激活第三车轮rad_3的行车制动器。
52.在第三车轮rad_3上的行车制动器完全激活之后并且在保证第四车轮rad_4上的行车制动器未激活(亦即断开)的情况下,在第四车轮rad_4上的施加的电机扭矩m
antrieb
消减直到0nm(时刻t7)。在第四车轮rad_4的该扭矩m
antrieb
完全消减(消减开始直至时刻t7)之
后,第四车轮rad_4的行车制动器才激活(时刻t8)。
53.在相应的车轮上进行电机扭矩m
antrieb
的相应消减和行车制动力矩m
brems
的随后形成期间,作用到其他车轮上的保持力矩m
brems
或者说m
antrieb
确保车辆在静止状态中不会滚开。
54.通过在相应的车轮上的电机扭矩m
antrieb
消减的期间不激活(亦即断开)在相应的车轮上的运行制动器,不会产生所述的吱嘎噪声。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1