驾驶员辅助系统的制作方法
本发明落入机动车辆驾驶员辅助系统领域内,并且更具体地涉及一种促进此类车辆进行对生态负责的驾驶的驾驶员辅助系统。
背景技术:
1、新型机动车辆无论配备有电动发动机或内燃发动机还是混合动力车辆,都被设计成通过尽可能例如限制当驾驶时车辆的比如二氧化碳(co2)等温室气体的排放或电力的消耗来满足环境标准。然而,根据车辆驾驶员采用的驾驶风格,燃料和/或电能的消耗可能有很大差异。
2、当驾驶员在急加速与猛制动之间交替时,驾驶通常被描述为“激进的”。与以被认为更常规的风格驾驶时所达到的消耗相比,使用这种驾驶风格的驾驶员会发现车辆的燃料和/或能量消耗增加。因此,汽车制造商采取了各种手段来影响驾驶员行为并减少他们的燃料和/或能量消耗。
3、一些车辆提议向驾驶员提供关于燃料和/或能量消耗的信息。这种类型的信息允许驾驶员根据他希望达到的燃料和/或能量消耗来调整他的风格。因此,在某些车辆中,驾驶员可以知悉他的当前消耗量和平均消耗量。当前消耗量基于当前消耗的燃料量和当时的车辆速度计算得到。然后,根据其推导出消耗量(例如以升/百千米或以升/小时为单位),并且可以向驾驶员显示该消耗量。在其他车辆中,平均消耗量基于所消耗的燃料量和自系统上次重置以来行驶的距离计算得到。
4、一些车辆配备有驾驶员辅助系统以更具体地指导驾驶员实现对生态负责的驾驶。因此,驾驶员辅助系统例如可以建议驾驶员采取可以减少燃料和/或能量消耗的行动。
5、众所周知,驾驶员辅助系统耦接到车辆的导航系统,以便能够预计和预测驾驶员在导航系统预定义的路线上要执行的动作序列,以期驾驶员采用对生态负责的驾驶风格。为此,驾驶员辅助系统可以根据来自导航系统的数据计算例如驾驶员必须产生的加速力,和/或计算使得在可能减速但不制动的情况下可以大大降低燃料消耗的减速距离。
技术实现思路
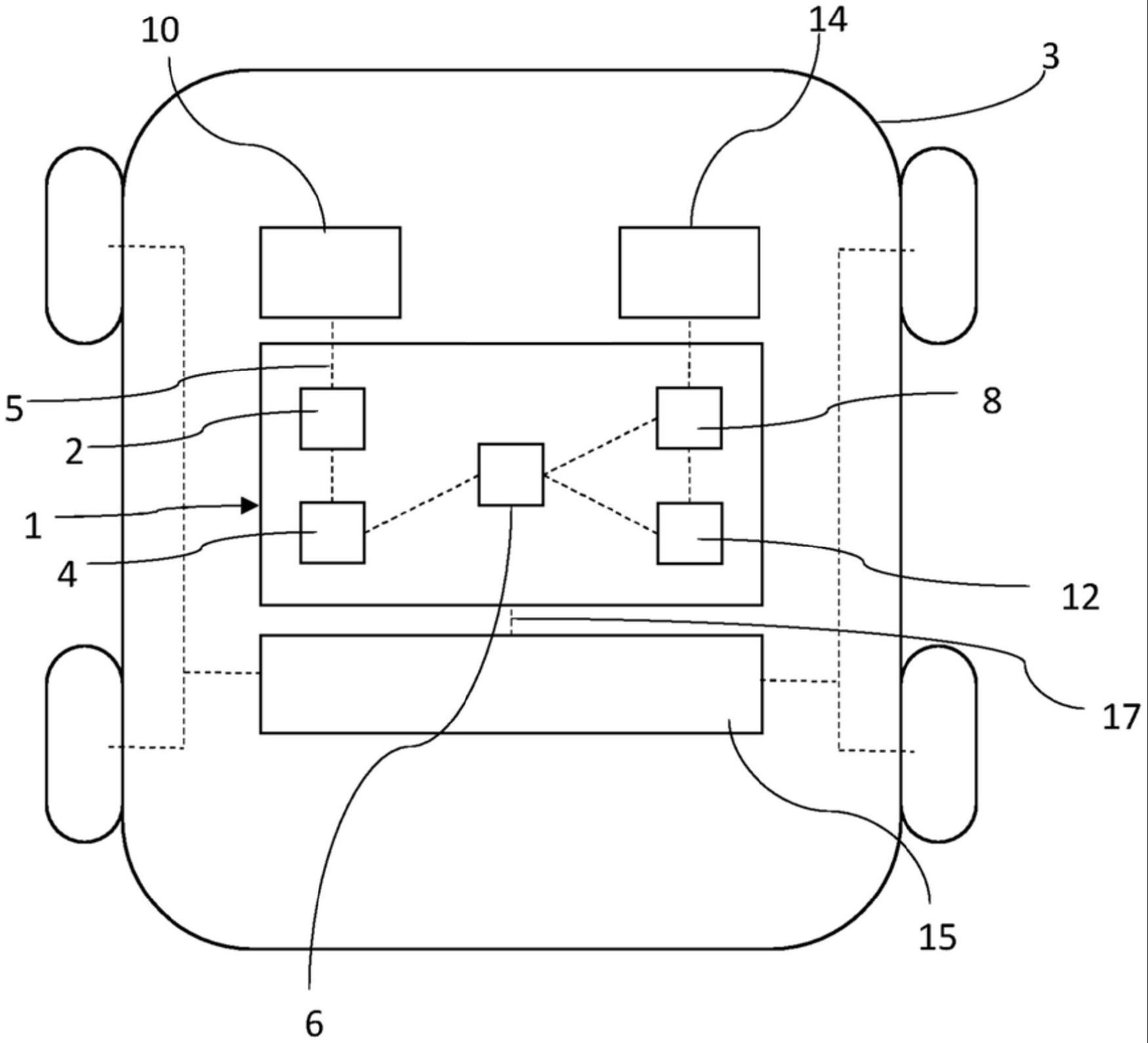
1、在此背景下,本发明提出了一种用于机动车辆的驾驶员辅助系统,其特征在于,该驾驶员辅助系统至少包括:导航数据检索系统、被配置为根据检索到的导航数据创建至少一个事件序列的编译接口、以及用于计算驾驶员警告距离的计算机,该驾驶员警告距离是针对所创建的每个事件序列中的每个事件、至少根据特定于每个事件的车辆的自然减速距离来计算的,所述驾驶员辅助系统进一步包括管理接口,该管理接口根据每个事件的计算出的驾驶员警告距离来确定每个事件序列中的事件的优先级。
2、驾驶员辅助系统可以计算车辆的自然减速距离,在该距离上,需要驾驶员抬起脚离开车辆的加速器踏板以使车辆由于路线上存在的事件自然减速。
3、导航系统定义为使车辆的驾驶员到达所选目的地该车辆应该采取的路线。驾驶员辅助系统的导航数据检索系统与导航系统通信以检索关于所述导航系统选择的路线的导航数据。
4、导航数据检索系统然后将这些导航数据传输到编译接口,该编译接口根据这些导航数据创建至少一个事件序列。每个事件对应于路线的阶段和/或车辆速度的变化,比如路线上的环形交叉路口或路径出口。事件序列对应于导航系统指示的可能出现在路线上的事件列表。
5、驾驶员辅助系统计算机计算每个事件的驾驶员警告距离。该驾驶员警告距离对应于事件与驾驶员被通知他应该将脚从车辆的加速器踏板上移开以至少经由在没有对制动踏板采取特定动作的情况下车辆的自然减速来产生为达到目标速度所需的减速的时刻车辆的位置之间的距离,该目标速度是车辆至少在事件开始时必须行驶的速度。
6、然后,管理接口通过至少根据事件的驾驶员警告距离对这些事件在事件序列中相对于彼此的优先级进行排序来组织事件序列,该优先级排序通过突出显示例如具有最接近车辆位置的驾驶员警告距离的事件而不是最接近车辆位置的事件来实现。
7、上文解释的概念、特别是事件优先级排序的概念,可以通过以下个案研究来说明:事件序列至少包括第一个事件和第二个事件,第一个事件位于距车辆的位置一千米(1000m)的时刻t处,第二个事件位于距车辆的位置一千三百米(1300m)的同一时刻t处。驾驶员辅助系统计算机已经针对第一个事件计算出三百米(300m)的第一驾驶员警告距离,这意味着当车辆距第一个事件三百米时会向驾驶员发送警告,并且驾驶员辅助系统计算机已经针对第二个事件计算出七百米(700m)的第二驾驶员警告距离,这意味着当车辆距第二个事件七百米时会向驾驶员发送警告。警告距离之间的差异可以特别是通过以下事实得到解释:本例中的第一个事件包括较大弯道,由于此弯道,车辆的速度必须稍微降低,而本例中的第二个事件包括停车标志,车辆必须停在此停止。在时刻t,车辆还需行驶七百米(700m)以遇到触发第一警告距离的区域并且驾驶员接收到对应于第一警告距离的第一警告,而车辆仍需行驶六百米(600m)以遇到触发第二警告距离的区域并且驾驶员接收到对应于第二警告距离的第二警告。由于因此车辆相比于触发对应于第一个事件的第一驾驶员警告距离的区域更靠近触发对应于第二个事件的第二驾驶员警告距离的区域,所以管理接口通过将第二个事件定位在事件序列中的第一个事件之前来将第二个事件排序为优先于第一个事件。
8、根据本发明的可选特征,导航数据系统被配置为与车辆的导航系统和/或便携式设备的导航系统通信。
9、便携式设备的导航系统例如可以是在适当情况下在已连接的便携式设备(比如移动电话)上下载的app,该app被配置为使用车辆的地理定位来计算路线,使得车辆可以到达车辆的驾驶员选择的目的地。
10、根据本发明的另一个可选特征,每个事件的驾驶员警告距离由计算机通过至少将自然减速距离、制动距离和驾驶员反应距离相加来计算,这三个距离中的每一个都由编译接口与事件序列中的每个事件相关联。
11、如上所述,自然减速距离对应于驾驶员已经将脚从车辆加速器踏板上移开并且还不需要踩下车辆制动踏板的情况下车辆靠惯性滑行的距离。
12、制动距离对应于驾驶员使用车辆的制动踏板所经过的距离。
13、反应距离对应于驾驶员辅助系统通知驾驶员进入减速距离的时刻车辆的位置与驾驶员对此通知作出反应的时刻车辆的位置之间的距离。
14、根据本发明的另一可选特征,计算机整合与导航系统选择的路线上存在的倾斜度相关的至少一个数据、对轮胎在地面上的抓地力产生负面影响的因素、车辆的实际速度、天气状况和/或车辆荷载,以便相应地调整每个事件的驾驶员警告距离。
15、根据本发明的另一可选特征,计算机整合与影响车辆的实时交通相关的至少一个数据,以便相应地调整每个事件的驾驶员警告距离。
16、根据本发明的另一可选特征,辅助系统配备有用于计算车辆的过度消耗情况的设备,该设备被配置为确定在每个事件上的过度消耗值。
17、根据本发明的另一可选特征,当该警告距离大于或等于车辆的位置与接近的事件之间的距离并且当减速距离非零时,该过度消耗值能够取第一非零值;或者当该警告距离小于该车辆与接近的事件之间的距离和/或当该减速距离为零时,该过度消耗值能够取第二零值。
18、根据本发明的另一可选特征,该管理接口被配置为根据所生成的事件序列中的每个事件的驾驶员警告距离并根据每个事件的过度消耗值来对这些事件进行优先级排序。
19、根据本发明的另一可选特征,当驾驶员警告距离最接近车辆位置并且当事件的过度消耗值非零时,管理接口将该事件排序为优先。
20、根据本发明的另一可选特征,驾驶员辅助系统包括用于警告驾驶员警告距离的警告装置、和/或用于显示驾驶员警告距离的设备、和/或用于与车辆的显示设备通信该警告距离的装置。
21、本发明还涉及一种自动驾驶或半自动驾驶车辆,该车辆包括根据前述权利要求中任一项所述的驾驶员辅助系统和能够发出车辆减速命令指令的车辆驾驶控制模块,所述辅助系统包括:通信设备,该通信设备被配置为在该驾驶控制模块的指导下传输信息。
22、本发明还涉及一种优化车辆的电能和/或热能消耗的驾驶员辅助方法,在该方法期间,由根据前述权利要求中任一项所述的驾驶员辅助系统基于来自导航系统的导航数据来计算事件序列中的每个事件的驾驶员警告距离,然后将该驾驶员警告距离传输给驾驶员以提示他根据路线上存在的事件进行减速,并从而优化该车辆的能量消耗,该管理接口根据每个事件的警告距离来对这些事件进行优先级排序。
23、应当理解,管理接口在给定的事件序列中对事件进行优先排序在于,管理接口不仅相对于车辆地理位置考虑每个事件的出现以便按顺序放置这些事件,并且该管理接口可以通过在与事件相关联的驾驶员警告距离使得触发该警告距离的区域相比于触发与事件序列中的其他事件相关联的驾驶员警告距离的区域更接近车辆的位置时将该事件考虑为优先来修改关于其出现而考虑的事件顺序。
24、根据本发明的另一特征,驾驶员辅助方法包括第一步骤,在该步骤期间,该数据检索系统与该导航系统通信以检索导航数据,然后将这些导航数据传输到该编译接口,以使得该编译接口根据来自该导航系统的数据创建至少一个事件序列。
25、根据本发明的另一特征,驾驶员辅助方法包括第二步骤,在该步骤中,该计算机确定该编译接口所创建的事件序列中的每个事件的驾驶员警告距离。
26、根据本发明的另一可选特征,在该第二步骤期间,该计算机首先确定该事件序列中的每个事件的减速距离、制动距离和减速距离,然后根据每个事件的该减速距离、该制动距离和该反应距离计算该驾驶员警告距离。
27、根据本发明的另一特征,驾驶员辅助方法包括第三步骤,在该步骤期间,该驾驶员辅助系统的用于计算该车辆的过度消耗情况的设备确定每个事件的过度消耗值,然后该管理接口根据每个事件的该驾驶员警告距离和每个事件过度消耗值来对这些事件进行优先级排序。
28、根据本发明的另一特征,驾驶员辅助方法包括第四步骤,在该第四步骤期间,驾驶员辅助系统在需要减速时告诉驾驶员进行减速。
29、根据本发明的另一特征,驾驶员辅助方法包括第四替代步骤,在该步骤期间,装配到自动驾驶或半自动驾驶车辆的该驾驶员辅助系统的通信设备与控制模块通信以控制该自动驾驶或半自动驾驶车辆的驾驶,该控制模块被配置为向该自动驾驶或半自动驾驶车辆传输减速命令指令。
- 还没有人留言评论。精彩留言会获得点赞!