用于在管道上行进的具有三个铰接轮的磁性爬行器的制作方法
本公开总体上涉及一种仅具有三个铰接轮并且能够行进和检查铁磁性管道及其它弯曲表面的磁性爬行器。
背景技术:
1、石油和天然气行业中面临的最大挑战之一是定期检查炼油厂、天然气厂、海上平台以及其它工厂和设施中的高架资产。这些资产包括在检查工作中难以接近的高架管道和结构。通常,检查它们的唯一可行的方法是搭建脚手架,以便检查员接近该资产并进行人工检查。这种脚手架不仅昂贵,并且对于频繁的检查来说是一个很大的成本障碍,并且造成主要为坠落和绊倒危险形式的安全问题。
2、正是考虑到本领域中的这些和其它问题,本公开旨在提供一种有效的磁性爬行器的技术方案,该磁性爬行器仅具有三个铰接磁性轮,用于在铁磁性弯曲表面上行进和检查。
技术实现思路
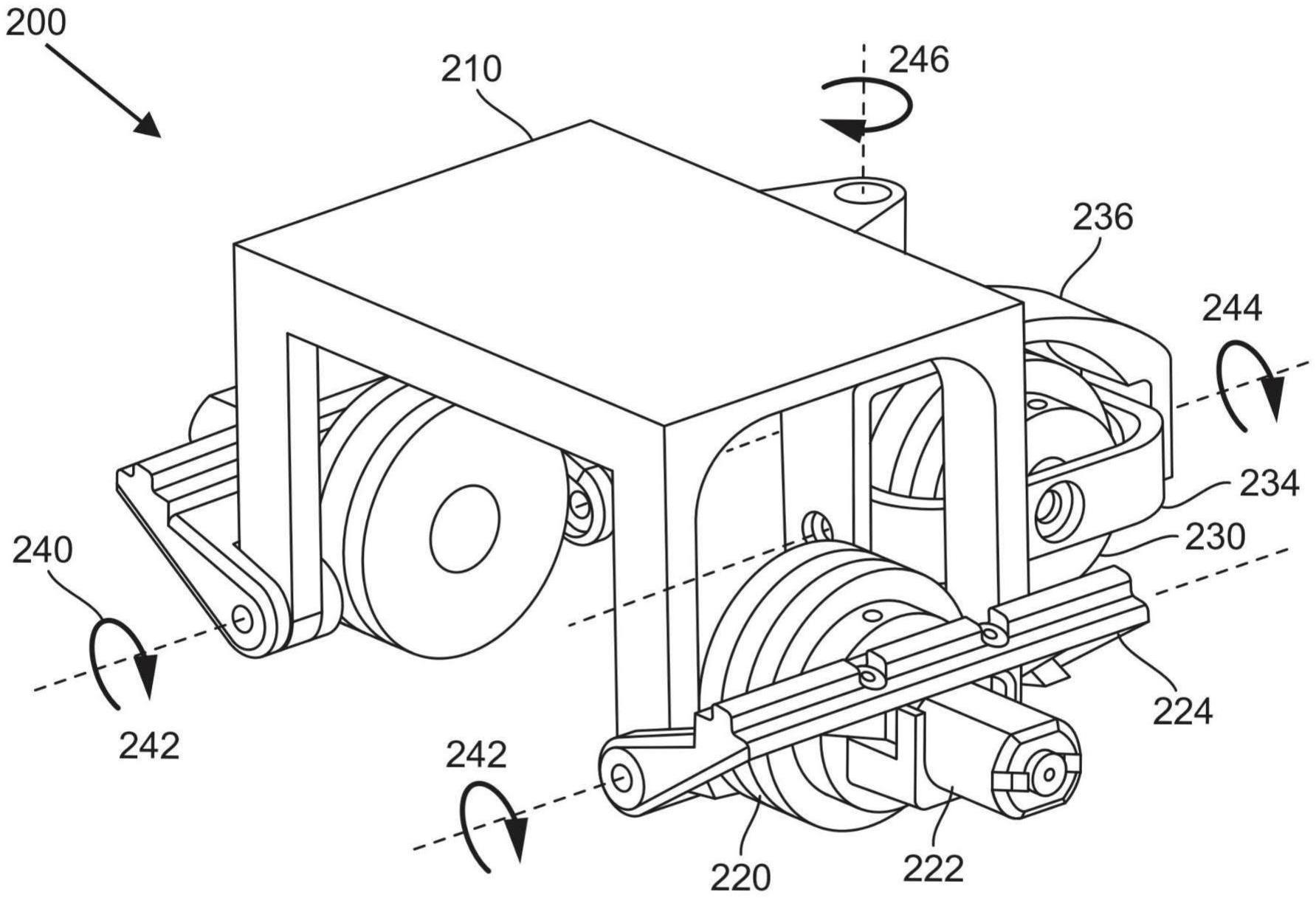
1、根据本公开的第一方面,提供了一种被配置成在铁磁性圆柱形表面上行进并检查该铁磁性圆柱形表面的磁性爬行器。该磁性爬行器包括:底盘;联接至底盘并被配置成控制磁性爬行器的控制器;联接至底盘并被配置成在控制器的控制下检查铁磁性圆柱形表面的探头;以及联接至底盘并且被配置成与圆柱形表面沿切向接触并磁性附着到圆柱形表面上的三个铰接磁性轮。这三个磁性轮包括:右驱动轮和左驱动轮,它们分别通过右铰接接头和左铰接接头联接至底盘,并被配置成在控制器的控制下通过使用相应的右驱动电动机和左驱动电动机围绕各自的右驱动旋转轴线和左驱动旋转轴线独立地主动旋转而在圆柱形表面上沿着期望的方向驱动磁性爬行器;以及后轮,其通过后铰接接头联接至底盘,并且被配置成响应于右驱动轮和左驱动轮的主动旋转围绕后驱动旋转轴线被动地旋转。右铰接接头和左铰接接头分别提供右驱动轮和左驱动轮相对于底盘围绕各自的右倾斜旋转轴线和左倾斜旋转轴线的单个旋转自由度,以使右驱动轮和左驱动轮相对于底盘倾斜,并保持与圆柱形表面的曲率相切。后铰接接头提供后轮相对于底盘围绕后倾斜旋转轴线和垂直于后倾斜旋转轴线的回转旋转轴线的两个旋转自由度,所述后倾斜旋转轴线用于使后轮相对于底盘倾斜并保持与圆柱形表面的曲率相切,所述回转旋转轴线用于响应于磁性爬行器的驱动使后轮相对于底盘沿着期望的方向回转。
2、在与上述实施例一致的一个实施例中,所述右驱动轮和所述左驱动轮还被配置成在控制器的控制下使用它们各自的右驱动电动机和左驱动电动机沿着向前或向后的方向围绕它们各自的右驱动轴线和左驱动轴线独立地主动旋转。
3、在与上述实施例一致的一个实施例中,所述磁性爬行器还包括角度测量传感器,该角度测量传感器联接至底盘,并被配置成在控制器的控制下测量三个磁性轮相对于底盘的相应倾斜角度,并且测量后轮相对于底盘的回转角度。
4、在与上述实施例一致的一个实施例中,所述控制器还被配置成通过使用测量的角度控制右驱动轮和左驱动轮的驱动而将磁性爬行器在圆柱形表面上保持在期望的轨迹上。
5、在与上述实施例一致的一个实施例中,所述期望的轨迹是具有圆柱形表面的期望螺距的螺旋路径。
6、在与上述实施例一致的一个实施例中,所述探头包括超声波测试(ut)传感器,该传感器被配置成在控制器的控制下无损地测量圆柱形表面的厚度,并且所述控制器还被配置成通过控制ut传感器测量表面厚度并同时控制右驱动轮和左驱动轮沿着螺旋路径的驱动而在整个圆柱形表面上执行表面厚度的二维测绘。
7、在与上述实施例一致的一个实施例中,所述控制器还被配置成使用测量的角度和磁性爬行器的几何形状来估计磁性爬行器相对于圆柱形表面的姿态。
8、在与上述实施例一致的一个实施例中,所述后铰接接头被配置成实现后轮围绕后回转旋转轴线的360°旋转。
9、在与上述实施例一致的一个实施例中,所述探头包括超声波测试(ut)传感器,该传感器被配置成在控制器的控制下无损地测量圆柱形表面的厚度。
10、在与上述实施例一致的一个实施例中,所述圆柱形表面是碳钢管道或容器的一部分。
11、根据本公开的另一个方面,提供了一种使用磁性爬行器在铁磁性圆柱形表面上行进和检查的自动化方法。所述磁性爬行器包括底盘、联接至底盘的控制器、联接至底盘的探头、以及联接至底盘的三个铰接磁性轮。所述三个磁性轮包括分别通过右铰接接头和左铰接接头联接至底盘的右驱动轮和左驱动轮、以及通过后铰接接头联接至底盘的后轮。所述方法包括:在控制器的控制下通过探头检查铁磁性圆柱形表面;通过三个铰接磁性轮与圆柱形表面沿切向接触并磁性附着到圆柱形表面上;通过在控制器的控制下使用相应的右驱动电动机和左驱动电动机围绕各自的右驱动旋转轴线和左驱动旋转轴线独立地主动旋转右驱动轮和左驱动轮而在圆柱形表面上沿着期望的方向驱动磁性爬行器;响应于右驱动轮和左驱动轮的主动旋转围绕后驱动旋转轴线被动地旋转后轮;相对于底盘倾斜右驱动轮和左驱动轮,同时使用相应的右铰接接头和左铰接接头使它们保持与圆柱形表面的曲率相切,以分别提供右驱动轮和左驱动轮相对于底盘围绕各自的右倾斜旋转轴线和左倾斜旋转轴线的单个旋转自由度;以及使后轮相对于底盘倾斜,同时保持与圆柱形表面的曲率相切,并且响应于磁性爬行器的驱动使用后铰接接头使后轮相对于底盘沿着期望的方向回转,以提供后轮相对于底盘围绕后倾斜旋转轴线和垂直于后倾斜旋转轴线的回转旋转轴线的两个旋转自由度。
12、在与上述方法一致的一个实施例中,主动地旋转右驱动轮和左驱动轮包括在控制器的控制下使用它们各自的右驱动电动机和左驱动电动机围绕它们各自的右驱动轴线和左驱动轴线独立地向前或向后主动旋转右驱动轮和左驱动轮。
13、在与上述方法一致的一个实施例中,所述磁性爬行器还包括联接至底盘的角度测量传感器,并且所述方法还包括使用由控制器控制的角度测量传感器来测量三个磁性轮相对于底盘的相应倾斜角度,并且测量后轮相对于底盘的回转角度。
14、在与上述方法一致的一个实施例中,所述方法还包括由控制器通过使用测量的角度控制右驱动轮和左驱动轮的驱动而将磁性爬行器在圆柱形表面上保持在期望的轨迹上。
15、在与上述方法一致的一个实施例中,所述期望的轨迹是具有圆柱形表面的期望螺距的螺旋路径。
16、在与上述方法一致的一个实施例中,所述探头包括超声波测试(ut)传感器,并且所述方法还包括在控制器的控制下使用该ut传感器无损地测量圆柱形表面的厚度,并且由控制器通过控制ut传感器测量表面厚度同时控制右驱动轮和左驱动轮沿着螺旋路径的驱动而在整个圆柱形表面上执行表面厚度的二维测绘。
17、在与上述方法一致的一个实施例中,所述方法还包括由控制器使用测量的角度和磁性爬行器的几何形状来估计磁性爬行器相对于圆柱形表面的姿态。
18、在与上述方法一致的一个实施例中,所述方法还包括通过后铰接接头实现后轮围绕后回转旋转轴线的360°旋转。
19、在与上述方法一致的一个实施例中,所述探头包括超声波测试(ut)传感器,并且所述方法还包括在控制器的控制下使用该ut传感器无损测量圆柱形表面的厚度。
20、在与上述方法一致的一个实施例中,所述圆柱形表面是碳钢管道或容器的一部分。
21、可以使用在本文中公开的各种实施例和实施方案的任何组合。可以通过阅读下文中的一些实施例的说明以及附图和权利要求,能够理解这些和其它方面以及特征。
- 还没有人留言评论。精彩留言会获得点赞!