用于车辆转毂试验的循环工况驾驶方法及其驾驶系统与流程
1.本发明涉及一种用于车辆转毂试验的循环工况驾驶方法,其中,所述方法包括第一驾驶模式和第二驾驶模式,其中,在激活所述第一驾驶模式时,通过计算机程序控制油门开度信号和/或制动信号,使车辆能够以循环工况速度曲线进行自动驾驶运行,在激活所述第二驾驶模式时,计算机程序能够计算所述循环工况中的最差和/或最好驾驶模式,通过控制车辆变速器的档位、油门开度信号和/或制动信号以所述最差和/或最好驾驶模式进行自动驾驶运行。本发明还涉及一种用于实施上述方法的驾驶系统,其中,所述驾驶系统包括计算机和执行机构,其中,所述执行机构设置用于操控车辆的踏板、点火装置和换档机构中的至少一个,其中,所述踏板包括油门踏板、制动踏板和离合器踏板。
背景技术:
2.车辆在转毂试验台上运行试验时,需要根据相关试验规范进行点火、起动、换档等操作以测试车辆在不同速度、不同档位、不同循环工况下的性能。
3.在进行车辆转毂试验时,通常是驾驶员人工进行上述操作,驾驶员根据需要进行的车辆测试需求或者各循环工况的车速需求进行驾驶操作。在现有测试中,常见的是wltc或cltc循环工况。wltc即全球轻型汽车测试循环工况(worldwide light-duty vehicle test cycle),cltc即中国轻型车测试循环工况(china light-duty vehicle test cycle)。cltc由wltc衍生而来,cltc相比于wltc更能够反映中国道路行驶的工况特色。
4.在试验中,试验驾驶员的技能、操作手法以及不同驾驶员的差异等均会对试验结果的稳定性造成影响。即使同一驾驶员操纵运行同一循环工况,在不同的试验中仍会表现出不稳定性。
技术实现要素:
5.本发明针对上述问题,提出了一种用于车辆转毂试验的循环工况驾驶方法,该循环工况驾驶方法不仅能够保证在进行车辆转毂试验时,多个循环之间的操纵稳定性,还能够得到循环工况的油耗极值,尤其循环工况的最大油耗值和最小油耗值。
6.根据本发明的用于车辆转毂试验的循环工况驾驶方法,至少包括第一驾驶模式和第二驾驶模式。在激活所述第一驾驶模式时,通过计算机程序控制油门开度信号和/或制动信号,使车辆能够以循环工况速度曲线进行自动驾驶运行;在激活所述第二驾驶模式时,计算机程序能够计算所述循环工况中的最差和/或最好驾驶模式,通过控制车辆变速器的档位、油门开度信号和/或制动信号以所述最差和/或最好驾驶模式进行自动驾驶运行。
7.应当理解,所述计算机程序在必要时也能够发出除了变速器档位、油门开度信号和制动信号以外的其他指令,以使车辆能够根据所需要的循环工况速度曲线进行自动驾驶运行。
8.根据本发明的方法的优选实施方式,其中,所述循环工况是wltc或cltc工况以及其他循环工况。wltc即全球轻型汽车测试循环工况,cltc即中国轻型车测试循环工况。
wltc/cltc循环工况曲线的横坐标为时间,纵坐标为车速。cltc由wltc衍生而来,一个循环时长均为1800秒。其中,cltc相对于wltc具有较低的平均车速,较长的怠速工况和更加动态的加减速工况。在本发明的框架内,循环工况也可以是除了wltc或cltc工况外的、本领域技术人员认为有意义的其他循环工况,根据本发明,也能够根据所述其它循环工况来实施相应的循环工况驾驶方法。
9.根据本发明的方法的优选实施方式,其中,所述计算机程序通过pid控制变速器的档位、油门开度信号和/或制动信号,使得车辆能够以所需要的循环工况速度曲线进行自动驾驶运行。pid控制即比例积分微分控制(proportional-integral-derivative control)。在本发明的框架内,计算机程序通过pid控制器进行所述pid控制,其中,目标值是根据循环工况进行自动驾驶运行中需要的车速,实际值是车辆转毂试验中实际的车速,pid控制器的输出信号至少包括油门开度信号和/或制动信号,由此使得车辆通过pid控制器按照循环工况中的变化车速运行。
10.根据本发明的方法的优选实施方式,其中,在计算所述最差和/或最好驾驶模式时,针对所述循环工况中每一秒的速度,计算该速度下车辆变速器的每个档位对应的发动机转速和扭矩,基于所述发动机转速和扭矩,在发动机万有特性曲线中求取在所述速度下每个档位对应的油耗值,其中,最大油耗值为最差驾驶模式,最小油耗值为最好驾驶模式。
11.根据本发明的方法的进一步优选实施方式,其中,在计算所述最差和/或最好驾驶模式时,针对所述循环工况中每一秒的速度,计算该速度的一偏差范围内的多个采样速度下车辆变速器的每个档位对应的发动机转速和扭矩,基于所述发动机转速和扭矩,在发动机万有特性曲线中求取在所述多个采样速度下每个档位对应的油耗值,其中,最大油耗值和对应的采样速度为最差驾驶模式,最小油耗值和对应的采样速度为最好驾驶模式。
12.根据本发明的方法的进一步优选实施方式,其中,所述采样速度是所述循环工况中每一秒的速度尤其
±
5%偏差范围内的采样速度,其中,所述采样速度的采样密度可以根据需要进行选择,例如以0.1km/h的密度进行采样。
13.发动机万有特性曲线是发动机负荷特性和速度特性曲线的合成,其能够表示发动机在整个工作范围内主要参数的变化关系。在本发明的框架内,发动机万有特性曲线是以发动机转速为横坐标,发动机扭矩为纵坐标的等燃油消耗率曲线。在确定发动机的转速和扭矩后,能够根据发动机万有特性曲线求取该转速和扭矩值下的发动机油耗。
14.在根据本发明的一个示例性的实施方式中,例如在wltc循环工况的第1500秒时,根据wltc速度曲线,目标车速为50.5km/h。根据所述目标车速,参照测试车型的道路阻力、轮胎和传动系统参数能够计算出在各个档位下发动机需要输出的转速和扭矩,其中,每个档位对应一组转速和扭矩。例如,具有6个档位的车型在50.5km/h的目标车速下具有6组转速和扭矩,根据所述6组转速和扭矩能够基于发动机万有特性曲线求取6个油耗值,其中,最小值油耗值对应为最好驾驶模式,最大油耗值对应为最差驾驶模式。
15.进一步地,在目标车速50.5km/h的一个偏差范围内,例如在50.5km/h
±
5%的速度范围内,针对多个采样速度计算车辆变速器的每个档位对应的发动机转速和扭矩,例如在0.1km/h的采样密度下,即在48-53km/h的范围内,选择48、48.1、48.2
……
52.9、53km/h共51个采样速度。每个采样速度例如在6档位车型的情况下对应6组转速和扭矩,根据每组转速和扭矩求取一个油耗值。针对50.5km/h
±
5%的速度范围所求取的所有油耗值,选出最小油
耗值对应为最好驾驶模式,最大油耗值对应为最差驾驶模式。
16.根据上述方法能够求取整个循环工况的最小油耗和最大油耗及其分别所对应的速度曲线和档位信息。由此,计算机程序能够根据计算得到的速度曲线和档位信息来操纵车辆进行自动驾驶运行。
17.根据本发明的方法的优选实施方式,其中,所述方法还包括第三驾驶模式,在激活所述第三驾驶模式时,驾驶员驾驶第一个循环工况,计算机程序记录该第一个循环工况期间的档位信息、油门踏板和/或制动踏板动作,在随后的循环工况中精确地以第一个循环工况中的驾驶员行为来控制车辆运行。
18.通过本发明的方法的第三驾驶模式,能够提高转毂试验的可重复性。通过获得在先驾驶过程的驾驶数据,将该驾驶员的驾驶风格参数化,使得在后的转毂试验能够复现在先的驾驶过程。
19.根据本发明的方法的优选实施方式,其中,在第三驾驶模式时,驾驶员根据上述的最好驾驶模式或最差驾驶模式所对应的速度曲线和档位信息进行操纵,使得车辆按照最好驾驶模式或最差驾驶模式进行循环工况试验。
20.根据本发明的另一方面,提出一种用于实施上述方法的驾驶系统,其中,所述驾驶系统至少包括计算机和执行机构。所述计算机用于执行所述计算机程序,以通过所述执行机构对车辆进行相应的控制操作。所述计算机指配置为执行根据本发明的方法的至少一部分的合适的控制设备或者一组多个控制设备,例如包括专用集成电路、一个或多个处理器、存储有指令的非暂时性存储器。所述计算机尤其存储有用于实施本发明的方法计算机程序。
21.根据本发明的驾驶系统的优选实施方式,在执行所述第三驾驶模式时,所述计算机能够收集驾驶员驾驶的第一个循环工况的信息,尤其随时间变化的档位信息、油门踏板操纵信息和/或制动踏板操纵信息等。上述信息通过预先确定的采样频率进行采样并存储在计算机的存储器中。
22.根据本发明的驾驶系统的优选实施方式,所述执行机构设置用于操控车辆的踏板、点火装置和换档机构中的至少一个,其中,所述踏板例如包括油门踏板、制动踏板和离合器踏板。由此,所述执行机构能够在所述计算机的控制下操纵车辆尤其在转毂台上按照循环工况、尤其按照wltc或者cltc循环工况进行自动运行。
附图说明
23.下面以实施例来示意性地说明根据本发明的用于车辆转毂试验的循环工况驾驶的方法。
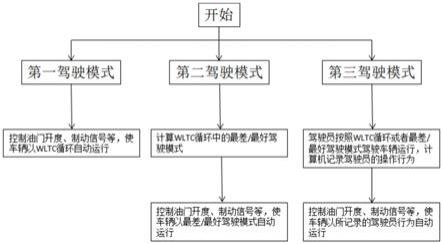
24.图1示出了根据本发明的以wltc循环进行车辆转毂试验的三种模式的流程图。
具体实施方式
25.下面结合示例性的实施例,对本技术中的技术方案进行阐述,应当理解,所描述的实施例仅用于说明,而并非以穷举的方式列出本发明的所有可行的实施例。基于本发明的实施例,本领域技术人员在不做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术的保护范围。
26.需要说明的是,说明书中术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
27.根据本发明的用于车辆转毂试验的循环工况驾驶系统,其至少具有计算机和执行机构。所述计算机用于执行所述计算机程序,以通过所述执行机构对车辆进行相应的控制操作。计算机的计算机程序能够发出油门开度信号和/或制动信号,通过执行机构操控油门开度和制动器的制动。此外,所述执行机构优选地还能够根据计算机程序的发出的指令操控点火装置、离合器踏板、变速器换挡机构中的至少一个。
28.所述计算机与所述执行机构之间的通信能够以本领域技术人员已知的方式进行,例如通过信号线缆进行通信。
29.如图1所示,通过根据本发明的驾驶系统,车辆能够以第一驾驶模式和第二驾驶模式被操控进行自动驾驶运行。在激活所述第一驾驶模式时,使车辆能够以例如wltc或cltc循环工况速度曲线进行自动驾驶运行;在激活所述第二驾驶模式时,所述计算机的计算机程序能够计算wltc或cltc循环工况中的最差和/或最好驾驶模式,使得车辆以所述最差和/或最好驾驶模式进行自动驾驶运行。
30.应当指出,本发明的框架内,循环工况受限于wltc或cltc循环工况,而可以是本领域技术人员认为有意义的所有循环工况。在本实施例中,仅以wltc或cltc循环工况作为示范性的实施例,而并不意味着对本发明的范围进行限制。
31.如图1所示,所述驾驶系统优选地还能够以第三驾驶模式操控车辆进行自动驾驶运行。所述第三驾驶模式中,驾驶员驾驶第一个wltc或cltc循环,计算机程序记录该第一个wltc或cltc循环期间的档位信息、油门踏板和/或制动踏板动作,在随后的循环工况中精确地以第一个循环工况中的驾驶员行为来控制车辆运行。
32.在第三驾驶模式中,如图1所示,驾驶员还能够根据最好驾驶模式或最差驾驶模式所对应的速度曲线和档位信息进行操纵,使得车辆按照最好驾驶模式或最差驾驶模式进行循环工况试验。
33.应当理解,所述计算机程序在必要时也能够发出除了变速器档位、油门开度信号和制动信号以外的其他指令,以使车辆能够根据所需要的循环工况速度曲线进行自动驾驶运行。
34.在本实施例中,所述计算机通过pid控制器来控制变速器的档位、油门开度信号和/或制动信号,使得车辆能够以所需要的循环工况速度曲线进行自动驾驶运行,其中,目标值是根据循环工况进行自动驾驶运行中需要的车速,实际值是车辆转毂试验中实际的车速,pid控制器的输出信号至少包括油门开度信号和/或制动信号,由此使得车辆通过pid控制器按照循环工况中的变化车速运行。
35.在计算最差和/或最好驾驶模式时,针对例如wltc或cltc循环中每一秒的速度,计算该速度下车辆变速器的每个档位对应的发动机转速和扭矩,基于所述发动机转速和扭矩,在发动机万有特性曲线中求取在所述速度下每个档位对应的油耗值。进一步地,在计算最差和/或最好驾驶模式时,针对wltc或cltc循环中每一秒的速度,计算该速度的一偏差范围内的多个采样速度下车辆变速器的每个档位对应的发动机转速和扭矩,基于所述发动机
转速和扭矩,在发动机万有特性曲线中求取在所述多个采样速度下每个档位对应的油耗值,其中,最大油耗值和对应的采样速度为最差驾驶模式,最小油耗值和对应的采样速度为最好驾驶模式。
36.根据本发明的方法的进一步优选实施方式,其中,所述采样速度是所述循环工况中每一秒的速度尤其
±
5%偏差范围内的采样速度,其中,所述采样速度的采样密度例如选择为0.1km/h。
37.以具有6个档位的车型为例,例如在wltc循环工况的第1500秒时,根据wltc速度曲线,目标车速为50.5km/h。根据该目标车速,参照测试车型的道路阻力(在该目标车速下例如为334.7n)、轮胎和传动系统参数计算出在6档位下发动机需要输出的6组转速和扭矩值,其中,每个档位对应一组转速和扭矩。根据所述6组转速和扭矩值,基于发动机万有特性曲线得到对应的6个点,即6个油耗值。
38.进一步地,在目标车速50.5km/h
±
5%的速度范围内,针对多个采样速度计算车辆变速器的每个档位对应的发动机转速和扭矩,其中,每个采样速度对应6组转速和扭矩,根据6组转速和扭矩能够得到发动机万有特性曲线中的6个点,每个点分别代表一个油耗值,也就是说,每个采样速度都能够得到6个油耗值。在针对50.5km/h
±
5%的速度范围的所有采样速度所求取的所有油耗值中,选出最小油耗值对应为最好驾驶模式,最大油耗值对应为最差驾驶模式。
39.根据上述方法求取整个wltc循环工况的最小油耗和最大油耗及其分别所对应的速度曲线和档位信息。所述速度曲线和档位信息尤其是在时间上的信息。
40.在本发明的示例性实施方式中,也能够针对cltc循环工况求取整个驾驶循环的油耗极值和对应的速度曲线、档位信息。
41.所述执行机构设置用于操控车辆的踏板、点火装置和换档机构中的至少一个,其中,所述踏板例如包括油门踏板、制动踏板和离合器踏板。由此,所述执行机构能够在所述计算机的控制下操纵车辆尤其在转毂台上按照wltc或者cltc循环工况进行自动运行,尤其按照计算机程序所计算出的最差和/或最好驾驶模式下的速度曲线和档位信息来操纵车辆进行自动驾驶运行。
42.应当理解,本发明以上所示出的实施例是示例性的而非限定性的,用于示出根据本发明的用于车辆转毂试验的循环工况驾驶方法的典型的实施方式。更准确地说,除上述说明的实施例外,利用本发明的各个特征进行组合产生的对于本领域技术人员来说有意义的大量变型方案同样是可行的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1