一种车辆能否上坎的判断方法及系统与流程
1.本发明涉及汽车智能控制的技术领域,尤其涉及一种车辆能否上坎的判断方法及系统。
背景技术:
2.随着汽车行业的发展,消费者对车辆的安全性和智能性要求越来越高,在环境复杂的路面上安全舒适的行驶成为各大汽车厂商愈发重视的一环。汽车在过坎及通过其它有过高的高度差路面时,通常是由驾驶员肉眼判断能否通过,十分容易判断失误以致上不去坎而严重磨损轮胎,即使成功过坎底盘和其它部件也容易受到损害,如被刮花、刮烂等。
3.现有的一些在过坎时辅助、调节的系统和方法,如申请号为cn201710901253.x 的专利所提出的“车辆过坎补偿控制方法、装置、系统和电机控制器”,通过减小驱动电机扭矩来防止过坎过程中车辆后悬的过度压缩,进而避免由于车辆后悬的过度压缩而引起的车辆垂直及纵向振动,降低弹簧效应对车上人员驾乘感受的破坏,改善车上人 员的驾乘感受,但仍无法提前对能否过坎进行观测和判断,为驾驶员提供可以参考的结论,提前避免破坏车上人员的驾驶感受;此外,因无法提前对能否过坎进行观测和判断,导致车辆上不去坎而严重磨损轮胎,或者即使成功过坎但造成底盘和其它部件受到损害。
4.如今,越来越多的汽车选择安装车载外置摄像头,汽车视觉感知技术也在快速发展,智能型辅助驾驶技术得以推广运用,基于车载外置摄像头、汽车视觉感知技术而提供的车辆能否上坎的判断方法,是市场和用户的需要。
技术实现要素:
5.针对现有技术存在的上述不足,本发明的目的是提供一种车辆能否上坎的判断方法,旨在上坎前为驾驶员提供是否可以安全上坎的提示,以提高驾驶安全性和驾驶体验。本发明的第二目的是提供一种判断车辆能否上坎的装置,以提高智能驾驶的安全性。
6.本发明的技术方案是这样实现的:一种车辆能否上坎的判断方法,其特征在于包括如下步骤:1)开启视觉识别模块的摄像头,实时采集前方路况信息,并将摄像头采集到前方路况信息的画面输入控制器,由控制器对采集到路况信息的画面进行计算处理,识别是否是路坎;2)识别到有路坎时,对其高度进行准确分析,得到目标路坎高度h;3)将目标路坎高度h与控制器内预先设定的最大高度h进行对比,判断其是否可通过,得到相应的输出结果;4)若汽车上电或者保持前进的行驶状态,则控制器通过与其输出端连接的仪表盘和\或蜂鸣器提示驾驶员前方的路坎信息;5)若汽车成功通过路坎,在控制器中记录下路坎信息。
7.这样,本发明的方法,能够预先通过控制器对采集到的路况信息的画面进行计算
处理,识别是否是路坎、路坎的高度等信息,将路坎高度与预先设定的最大高度h进行对比,判断其是否可通过,得到相应的输出结果,并将该结果通过仪表盘或蜂鸣器提示驾驶员前方的路坎信息,提高驾驶的智能化水平,提高驾驶安全性和驾驶体验。
8.进一步的:在步骤3)中,输出结果分为三类,ⅰ类,小于d1,初始定义d1为最大高度h的二分之一,则提示前方路坎可以通过;ⅱ类,大于d1且小于最大高度h,提示前方路坎较高,谨慎通行;ⅲ类,大于等于最大高度h,提示前方路坎过高,不可通行;最大高度h初始值为车辆的最小离地间隙g。这样能更进一步根据路坎高度,发出不同的提示光线或声音,便于驾驶员准确掌握路面的沟坎情况。
9.进一步的:在步骤3)中,控制器将路坎高度信息输出到学习模块;所述学习模块根据收集到的路坎信息,分析出成功通过的最高路坎高度h1和最高频通过高度范围的最大高度h2;对于h1,若h1大于最大高度h,则将h1的值赋给h;若h1小于最大高度h,则最大高度不变;对于h2,将h2的值赋给d1进行判断。通过设置学习模块,赋予本发明具有自动学习、更新的能力。
10.进一步的:所述摄像头,包括前摄像头、底盘摄像头和后摄像头。多组摄像头,更能准确显示车辆所处路面的实时状况。
11.进一步的:蜂鸣器根据控制器的计算处理结果类别进行鸣叫,发出声音或光线或声光一体以提示驾驶员。
12.进一步的:蜂鸣器鸣叫有三种:ⅰ类,频率为1hz,占空比为30%;ⅱ类,频率为1hz,占空比为60%;ⅲ类,占空比为100%;直到汽车完全过坎或离开路坎后停止提示。这样根据路坎的高度,发出不同的蜂鸣声,提醒驾驶员慎重处理,有效防止车辆底盘被刮花、刮烂。
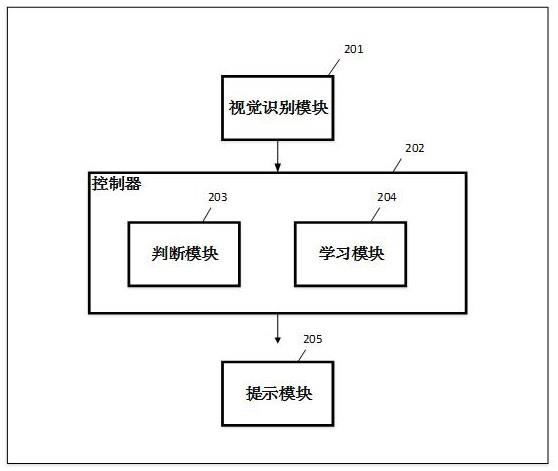
13.一种用于车辆能否上坎的判断方法的装置,其特征在于:主要包括视觉识别模块1、控制器和提示模块;视觉识别模块,与控制器的输入端电连接,包括多个设置在车身上的摄像头,实时采集路况信息画面;控制器,包括判断模块,按照判断模块内置的软件程序进行比较、分析、计算,判断视觉识别模块输入画面中是否存在路坎、路坎的几何尺寸;提示模块,与控制器的输出端电连接,根据控制器输出的控制命令,在控制仪表盘显示出相应提示信息,或控制蜂鸣器报警鸣叫。这样的装置,能够对摄像头实时采集路况信息画面进行比较、分析、计算,确定是否存在路坎、路坎的几何尺寸等。
14.进一步的:所述控制器,还包括学习模块;控制器将计算得到的路坎几何尺寸信息输出到学习模块,学习模块与判断模块电连接,将相关数据输出到判断模块,以便及时更新、完善。通过设置学习模块,赋予本发明具有自动学习、更新的能力,提高智能化水平。
15.进一步的:蜂鸣器根据控制器输出的路坎高度比较结果进行鸣叫,发出声音或光线或声光一体以提示驾驶员。
16.进一步的:所述摄像头,包括前摄像头、后摄像头和底盘摄像头。
17.总之,本发明具有如下有益效果:本发明的方法,能够预先通过控制器对采集到的画面信息进行计算处理,识别是否是路坎、路坎的高度等信息,将路坎高度与预先设定的最大高度h进行对比,判断其是否可通过,得到相应的输出结果,并将该结果通过仪表盘或蜂鸣器提示驾驶员前方的路坎信息,提高驾驶的智能化水平,提高驾驶安全性和驾驶体验。而且,本发明具有自动学习、更新的能力,提高智能化水平。
附图说明
18.附图1为本技术实施例系统组成模块示意图;附图2为本技术实施例方法流程示意图。
具体实施方式
19.以下结合附图对本发明的具体实施方案做详细描述。
20.参见图1-图2,本发明的一种用于车辆能否上坎的判断方法的装置,本实施中系统组成模块由图1所示,大体由视觉识别模块201、控制器202和提示模块205组成,具体每一部分如下:1、视觉识别模块201,与控制器202的输入端电连接,包括多个设置在车身上的摄像头,实时观测前方路况并采集路况信息画面,主要由前摄像头、后摄像头和底盘摄像头所拍摄的画面中识别出路坎,提取出路坎图像进行分析,识别出其路坎的高度;将这些信息输送给控制器202,由控制器202按照内置的软件进行比较、分析、计算等操作。此外,通过同一时刻前摄像头和后摄像头拍摄内容可以得出汽车是否通过路坎,并将这些信息输送给控制器202,由控制器202按照内置的软件进行比较、分析、计算等操作。
21.2、控制器202,控制器中主要包括判断模块203学习模块204,其输入信息由视觉识别模块201传递而来,即视觉识别模块201通过有线或无线的电连接结构,将各个摄像头所拍摄的画面(车外与行车相关的实时状态,如路面状况、周围状况、阴影、移动中的活动物体或人等)输送给控制器202,由控制器202按照判断模块203内置的软件进行比较、分析、计算等操作,判断画面中是否存在路坎、路坎的几何尺寸等,如长度、高度和宽度等信息。
22.1)判断模块根据该路坎高度信息与模块中储存的最大高度h进行对比, 得出相应结果,然后由控制器202根据结果向205提示模块输出控制命令。
23.2)学习模块在汽车通过路坎后(后摄像头),收集其路坎的几何尺寸信息(如高度信息),分析出本车和驾驶员成功通过路坎的大致高度范围,以及最高频通过路坎的高度范围,学习模块与判断模块电连接,能将这些信息输出到判断模块更新数据。
24.3、提示模块205,与控制器202的输出端电连接,根据控制器202输出的控制命令(信息),在控制仪表盘显示出相应提示信息,或控制蜂鸣器报警鸣叫,直至通过或离开路坎。
25.本实施流程如图2,具体工作流程如下:1.101开启视觉识别模块的摄像头,如前摄像头、后摄像头和底盘摄像头,实时观测前方路况并采集路况信息,并将摄像头采集到前方路况的信息画面输入控制器,由控制器对采集到的信息画面进行计算处理,识别是否是路坎;2.102识别到有路坎时,对其几何尺寸进行分析计算处理,尤其是高度进行准确计算,得到目标路坎高度h;3.103将目标路坎高度h与控制器内预先设定(存储)的最大高度h进行对比,判断其是否可通过,得到相应的输出结果r,输出结果分为三类,ⅰ类,小于d1,初始定义d1为最大高度h的二分之一,则提示前方路坎可以通过;ⅱ类,大于d1且小于最大高度h,提示前方路坎较高,谨慎通行,ⅲ类,大于等于最大高度h,提示前方路坎过高,不可通行;最大高度初始数据为本车的最小离地间隙g;
4.104若汽车上电或者保持前进的行驶状态,则控制器通过与其输出端连接的仪表盘和\或蜂鸣器,根据计算结果输出信号(命令)提示驾驶员前方的路坎信息。仪表盘显示步骤3中的结果信息,蜂鸣器根据结果类别进行鸣叫,发出声音或光线或声光一体以提示驾驶员:ⅰ类,频率为1hz,占空比为30%;ⅱ类,频率为1hz,占空比为60%;ⅲ类,占空比为100%。直到汽车完全过坎或离开路坎后停止提示;5.105若汽车成功通过路坎,记录下路坎信息,将路坎信息通过控制器输出到学习模块;6.106学习模块根据收集到的路坎信息,分析出成功通过的最高路坎高度h1和最高频通过高度范围的最大高度h2。对于h1,若h1大于最大高度h,则将h1的值赋给h;若h1小于最大高度h,则最大高度不变。对于h2,将h2的值赋给d1进行判断。
26.本发明的方法,在上坎前根据控制器202输出的控制命令(信号),通过控制仪表盘或蜂鸣器为驾驶员提供是否可以安全上坎的提示,以提高驾驶安全性和驾驶体验,更能防止车辆底盘和其它部件受到被刮花、刮烂等损害,提高安全性。
27.最后需要说明的是,本发明的上述实例仅仅是为说明本发明所作的举例,而并非是对本发明的实施方式的限定。尽管申请人参照较佳实施例对本发明进行了详细说明,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其他不同形式的变化和变动。这里无法对所有的实施方式予以穷举。凡是属于本发明的技术方案所引申出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1