防碰撞控制策略、可读存储介质、防碰撞控制系统和车辆的制作方法
1.本技术涉及汽车领域,尤其是涉及一种防碰撞控制策略、可读存储介质、防碰撞控制 系统和车辆。
背景技术:
2.机动车追尾碰撞是最常见的交通事故之一,对驾驶员和用路人构成了严重的安全威 胁。当前有许多车辆配备了碰撞预防和警示系统,用于警示驾驶员可能与其他车辆或障 碍物发生碰撞,和控制车辆采取防止碰撞措施。但是现有的这些碰撞预防和警示系统的 检测精度低,容易造成误触发,甚至造成车辆失控,危害驾驶者的行驶安全。
3.申请内容
4.本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术的一个目的在 于提出一种用于车辆的防碰撞控制策略,该防碰撞控制策略可警示驾驶员并且控制车辆 采取防碰撞措施,该防碰撞控制策略先进。
5.本技术的另一个目的在于提出一种可读存储介质。
6.本技术的另一个目的在于提出一种用于车辆的防碰撞控制系统。
7.本技术的再一个目的在于提出一种车辆。
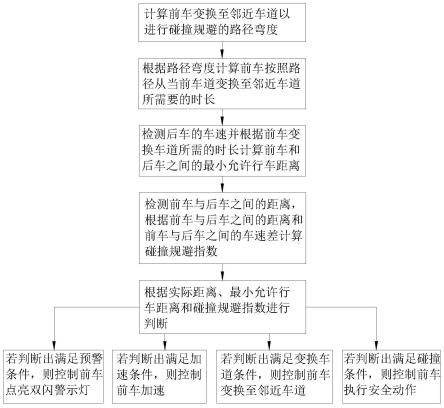
8.根据本技术实施例的用于车辆的防碰撞控制策略,包括至少如下步骤:计算前车从 当前车道变换至邻近车道所需要的时长;检测后车的车速并结合所述时长计算前车和后 车之间的最小允许行车距离;检测前车与后车之间的实际距离,且根据所述实际距离和 所述最小允许行车距离进行判断;若判断出满足变换车道条件,则控制前车从当前车道 变换至邻近车道。
9.根据本技术实施例的用于车辆的防碰撞控制策略,根据计算前车从当前车道变换至 邻近车道所需要的时长为基准,计算前车与后车之间的实际距离和最小允许行车距离来 进行判断,可在预警到碰撞的发生时,控制前车从当前车道变换至邻近车道。防碰撞控 制策略应用于车辆时,车辆可实时计算后方车辆的速度,以及路面环境等,多方面的参 数来制定防碰撞控制策略,应用防碰撞控制策略的车辆不但能够预警到碰撞的发生,还 能执行防碰撞的规避动作,车辆的行驶安全性高。
10.可选地,所示计算前车从当前车道变换至邻近车道所需要的时长包括如下步骤:计 算前车按照定义的路径变换至邻近车道以进行碰撞规避的路径弯度;根据路径弯度计算 前车按照所述路径从当前车道变换至邻近车道所需要的时长。
11.在一些实施例中,所述检测前车与后车之间的实际距离,且根据所述实际距离和所 述最小允许行车距离进行判断包括::根据前车与后车之间的距离和前车与后车之间的 车速差计算碰撞规避指数;根据所述实际距离、所述最小允许行车距离和所述碰撞规避 指数进行判断。
12.具体地,所述步骤还包括:若判断出满足预警条件,则控制前车点亮双闪警示灯; 若判断出满足加速条件,则控制前车加速;若判断出满足碰撞条件,则控制前车执行安 全
动作,所述安全动作包括预紧安全带、关闭所有车窗和激活安全气囊的充气装置中的 一种或多种。
13.进一步地,所述满足预警条件包括:所述实际距离小于等于所述最小允许行车距离 且所述碰撞规避指数小于第一预设值;所述满足加速条件包括:所述实际距离小于等于 所述最小允许行车距离且所述碰撞规避指数大于等于所述第一预设值、小于所述第二预 设值,并且路面交通环境允许加速;所述满足变换车道条件包括:所述实际距离小于等 于所述最小允许行车距离且所述碰撞规避指数大于等于所述第一预设值、小于所述第二 预设值,并且路面交通环境不允许加速且允许变换车道;所述满足碰撞条件包括:所述 实际距离小于等于所述最小允许行车距离且所述碰撞规避指数大于等于所述第二预设 值,或所述实际距离小于等于所述最小允许行车距离且所述碰撞规避指数大于等于所述 第一预设值、小于所述第二预设值,并且所述路面交通环境不允许加速且不允许变换车 道。
14.根据本技术实施例的可读存储介质,所述可读存储介质上存储有可在处理器上运行 的防碰撞控制策略程序,所述防碰撞控制策略程序被所述处理器执行时实现上述任一项 所述的防碰撞控制策略的步骤。
15.根据本技术实施例的用于车辆的防碰撞控制系统,用于执行上述任一项所述的防碰 撞控制策略,所述防碰撞控制系统包括:控制中心;侧方位传感器,所述侧方位传感器 设置在所述车辆的左右两侧且分别与所述控制中心通讯连接;后方传感器,所述侧方传 感器设置在所述车辆的后方且与所述控制中心通讯连接,所述后方传感器用于检测前车 与后车之间的距离;前车速度传感器,所述前车速度传感器适于检测前车的车速且与所 述控制中心通讯连接。
16.根据本技术实施例的用于车辆的防碰撞控制系统,通过执行防碰撞控制策略,防碰 撞控制系统的检测精度高,执行策略速度快,防碰撞控制系统不但能够预警到碰撞的发 生,还能执行防碰撞的规避动作,可提升应用防碰撞控制系统的车辆行驶安全性。
17.具体地,所述侧方位传感器和所述后方传感器均为摄像头。
18.在一些实施例中,所述防碰撞控制系统还包括:分别与所述控制中心通讯连接的后 方雷达和前方雷达,所述后方雷达设置在车辆的后侧且适于朝向车辆的后方发射雷达波 束,所述前方雷达设置在车辆的前侧且适于朝向车辆的前方发射雷达波束。
19.可选地,所述前方雷达包括:第一雷达和第二雷达,所述第一雷达和所述第二雷达 分别向车辆的正前方和侧前方发射雷达波束。
20.在一些实施例中,所述防碰撞控制系统还包括:分别与控制中心相连的转向角传感 器、加速度传感器、轮速传感器、惯量检测单元、档位传感器、油门踏板位置传感器和 制动踏板位置传感器。
21.根据本技术实施例的车辆,包括上述任一项所述的防碰撞控制系统。
22.根据本技术实施例的车辆,通过应用防碰撞控制系统,车辆可在后方车辆具有追尾 倾向时及时向驾驶员预警,并且执行防止后方车辆追尾的动作以规避危险,提升车辆驾 驶的安全性。
23.本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得 明显,或通过本技术的实践了解到。
附图说明
24.本技术的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明 显和容易理解,其中:
25.图1是本技术实施例的防碰撞控制策略的运行步骤示意图;
26.图2是本技术实施例的防碰撞控制策略中前车从当前车道变换至邻近车道的行驶轨 迹图;
27.图3是本技术实施例的防碰撞控制策略中前车与后车之间的距离示意图;
28.图4是本技术实施例的碰撞规避指数的函数示意图;
29.图5是本技术实施例的防碰撞控制策略的运行步骤示意图;
30.图6是装备有本技术实施例的防碰撞控制系统的车辆的整车俯视图。
31.附图标记:
32.前车10、后车11、
33.防碰撞控制系统12、控制中心120、侧方位传感器28、后方传感器32、后方雷达 16、第一雷达30、第二雷达26、雷达波束20、
34.质量点300、当前车道360、邻近车道380、前车从当前车道变换至中间位置的运动 路线324、前车从中间位置变换至邻近车道的运动路线326、路径的第一部分y1的纵向 距离314、路径的第一部分y1的路径半径304、路径的第一部分y1的横向位移量312、 第一部分直线长度306、路径的第二部分y2的纵向距离316、第二部分y2的路径半径 322、第二部分直线长度308、
35.横坐标420、纵坐标400、线条440、线条与横坐标的交点460、后点480、
具体实施方式
36.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相 同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附 图描述的实施例是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
37.下面参考图1-图4描述根据本技术实施例的用于车辆的防碰撞控制策略,包括至少 如下步骤:
38.步骤s1:计算前车10从当前车道变换至邻近车道所需要的时长t
p
。
39.可以理解的是,本技术实施例的防碰撞控制策略应用在前车10上,前车10为正在 驾驶的可控车辆,在车辆的行驶方向上,前车10位于后车11的前方,本技术实施例的 防碰撞控制策略在于控制前车10规避后车11有可能对前车10造成的追尾碰撞。
40.而本技术实施例的防碰撞控制策略以从当前车道变换至邻近车道为主要规避方式, 前车10从当前车道变换至邻近车道即可规避后车11的碰撞,而前车10从当前车道变 换至邻近车道的所需要的时长t
p
即为安全时间,以此为基础来制定防碰撞策略。
41.步骤s1包括:
42.步骤s11:计算前车10按照定义的路径变换至邻近车道以进行碰撞规避的路径弯 度。
43.步骤s13:根据路径弯度计算前车10按照路径从当前车道变换至邻近车道所需要 的时长。
动时长t1和路径的第二部分y2的运动时长t2的总和,前车10从当前车道变换至邻近车道所需要的时长t
p
的计算公式为:
[0064][0065]
而由于路径的第一部分y1为前车10从当前车道变换至中间位置,因此路径的第一部分y1的横向位移量d为当前车道360至邻近车道380的横向长度w0的一半。假设路径的第一部分y1的路径半径r1和路径的第二部分y2的路径半径r2的长度相同,均为r,因此从当前车道变换至邻近车道的最小容许路径半径的计算公式为:
[0066][0067]
其中,a
ymax
为前车10最大容许侧向加速度。
[0068]
根据公式(8)和公式(7)得出前车10从当前车道变换至邻近车道所需要的时长t
p
的新的计算公式为:
[0069][0070]
由公式(9)可知,前车10从当前车道变换至邻近车道所需要的时长t
p
与当前车道360至邻近车道380的横向长度w0和前车10最大容许侧向加速度a
ymax
有关。而当前车道360至邻近车道380的横向长度w0为路面参数,前车10最大容许侧向加速度a
ymax
为车辆的行驶参数。
[0071]
在一些实施例中,a
ymax
可通过实车试验进行标定;在另一些实施例中,a
ymax
可基于车辆无线通信传输系统发送的由车载气温装置采集的车外温度、反应路面条件的车载图像传感器采集处理图像或遥测系统采集数据进行调整修改;举例来说,如果车外温度为摄氏零下五度且路面显示为雪地或冰面,a
ymax
可以此调整为2m/sec2,如果车外温度为摄氏二十度且路面显示为干燥路面,a
ymax
可调整为8m/sec2。
[0072]
因此前车10在行驶过程中,可通过测量当前车道360至邻近车道380的横向长度而得出当前车道变换至邻近车道所需要的时长,所需参数少,计算速度快。
[0073]
步骤s3:检测后车11的车速并根据前车10变换车道所需的时长计算前车10和后车11之间的最小允许行车距离。
[0074]
前车10和后车11之间的最小允许行车距离d
min
的计算公式为:
[0075]dmin
≥t
pvf
(10)
[0076]
其中,vf为后车11的车速。
[0077]
前车10从当前车道变换至邻近车道的所需要的时长t
p
即为安全时间,为通过检测后车11的车速vf,即可得出在这段时间内后车11的行驶距离,若前车10和后车11之间的距离大于这段时间内后车11的行驶距离,则说明后车11没有追尾碰撞的风险;若前车10和后车11之间的距离小于这段时间内后车11的行驶距离,那么有后车11追尾碰撞前车10的风险。
[0078]
步骤s5:检测前车10与后车11之间的实际距离,且根据前车10与后车11之间的距离和最小允许行车距离进行判断。
[0079]
其中,步骤s5包括:
[0080]
步骤s51:根据前车10与后车11之间的距离和前车10与后车11之间的车速差计算碰撞规避指数;
[0081]
如图3所示,前车10与后车11之间的实际距离d,前车10和后车11的运行方向的直线上前方的某一点为基点,x
l
为前车10的前端至基点的距离,xf为后车11的前端至基点的距离,l为前车10的长度。
[0082]
根据前车10与后车11之间的实际距离d的计算公式为:
[0083]
d=x
l-x
f-l
l
(11)
[0084]
前车10与后车11之间的车速差δv的计算公式为:
[0085]
δv=v
l-vf(12)
[0086]
根据前车10与后车11之间的实际距离d和前车10与后车11之间的车速差δv计算碰撞规避指数coll_av
index
的计算公式为:
[0087][0088]
其中,a1、a2和a3为前车10车速设计参数函数,用以避免碰撞障碍物和系统误触发的同时降低后车11追尾碰撞的可能性。
[0089]
在一些实施例中,基于v
l
=50kph的车速计算碰撞规避指数时,a1、a2和a3的预设值为下式所示:
[0090][0091]
参考图4为碰撞规避指数的函数示意图,其中,横坐标420为临近车速δv对间距d之比率(1/秒),纵坐标400为碰撞规避指数coll_av
index
,线条440为碰撞规避指数coll_av
index
随δv/d的变化关系,线条440与横坐标420的交点460表示为后车11和前车10以相同车速行驶时,碰撞规避指数coll_av
index
为0,此时无碰撞风险,而后点480位于线条440上,并且位于交点460的横坐标的延伸方向一侧,后点480表示前车10的车速高于后车11的车速,碰撞规避指数coll_av
index
为-ε的点,此时无碰撞风险。即在前车10的车速大于等于后车11的车速时,碰撞规避指数小于等于0,无碰撞风险。
[0092]
步骤s53:根据实际距离、最小允许行车距离和碰撞规避指数进行判断。
[0093]
根据本技术实施例的防碰撞控制策略,根据实际距离、最小允许行车距离和碰撞规避指数几个指标进行判断,防碰撞控制策略应用于车辆时,车辆可实时计算后方车辆的速度,以及路面环境等,多方面的参数来制定防碰撞控制策略,相比于简单的通过测定后方车辆的距离来制定防碰撞控制策略,应用本技术实施例的防碰撞控制策略的检测精度高,执行策略速度快,应用防碰撞控制策略的车辆不但能够预警到碰撞的发生,还能执行防碰撞的规避动作,车辆的行驶安全性高。
[0094]
步骤s6:若判断出满足预警条件,则控制前车点亮双闪警示灯。
[0095]
满足预警条件包括:实际距离d小于等于最小允许行车距离d
min
,并且碰撞规避指数coll_av
index
小于第一预设值coll_av
th1
。
[0096]
即当根据实际距离d、最小允许行车距离d
min
和碰撞规避指数coll_av
index
判断,实际距离d小于等于最小允许行车距离d
min
,碰撞规避指数coll_av
index
小于第一预设值coll_
和后车11之间的最小允许行车距离d
min
;检测前车10与后车11之间的实际距离d;计 算碰撞规避指数coll_av
index
;计算第一预设值coll_av
th1
和第二预设值coll_av
th2
。
[0112]
其中,
[0113]
在一些具体实施例中,计算第一预设值coll_av
th1
和第二预设值coll_av
th2
,的计算公 式为:
[0114][0115][0116]
其中,ε1为最小值(0.2)。
[0117]
步骤s530:判断前车10与后车11之间的实际距离d是否大于最小允许行车距离 dmin,并且判断coll_av
index
是否小于coll_av
th1
;
[0118]
当前车10与后车11之间的实际距离d小于等于最小允许行车距离dmin,并且 coll_av
index
小于coll_av
th1
时,跳至步骤s540;
[0119]
当前车10与后车11之间的实际距离d大于最小允许行车距离dmin,跳至步骤610;
[0120]
当前车10与后车11之间的实际距离d小于等于最小允许行车距离dmin,并且 coll_avindex大于等于coll_avth1时,跳至步骤s550;
[0121]
步骤s540:满足预警条件,激活防碰撞控制动作,并且执行开启预警灯(如:开 启双闪警示灯),并跳至步骤610;
[0122]
步骤s550:判断coll_av
th2
是否大于等于coll_av
index
;
[0123]
当coll_av
index
大于等于coll_av
th1
,并且coll_av
index
小于coll_av
th2
时,跳至步骤s560;
[0124]
当coll_av
index
大于等于coll_av
th2
时,跳至步骤s600;
[0125]
步骤560:判断路面交通环境是否允许前车10加速以致v
l
(k)≥vf(k);
[0126]
当路面交通环境允许前车10加速以致v
l
(k)≥vf(k)时,即判断出满足加速条件跳至步 骤s570;
[0127]
当路面交通环境不允许前车10加速时,跳至步骤s580;
[0128]
步骤s570:执行向前加速动作,并跳至步骤610;
[0129]
步骤s580:判断路面交通环境是否允许前车10从当前车道变换至邻近车道;
[0130]
当路面交通环境允许前车10从当前车道变换至邻近车道时,即判断出满足变换车 道条件,跳至步骤s590;
[0131]
当路面交通环境不允许前车10从当前车道变换至邻近车道时,跳至步骤s600;
[0132]
步骤s590:执行从当前车道变换至邻近车道动作,并跳至步骤s610;
[0133]
步骤s600:执行启动安全动作,并跳至步骤s610;
[0134]
步骤s610:结束。
[0135]
本技术实施例的防碰撞控制系统执行上述任一项所述的防碰撞控制策略,下面参考 附图5简单描述本技术实施例的防碰撞控制系统的执行运动。
[0136]
本技术实施例的防碰撞控制系统,每间隔时间k就会进行计算前车10从当前车道 变换至邻近车道所需要的时长tp(k),即每隔时间k就会计算最小允许行车距离dmin (k)、
前车10与后车11之间的实际距离d(k)、碰撞规避指数coll_av
index
(k)、 coll_av
th1
和coll_av
th2
,随后防碰撞控制系统对上述数据进行判断。
[0137]
当前车10与后车11之间的实际距离d(k)大于最小允许行车距离dmin(k)时, 防碰撞控制系统不激活防碰撞控制动作。
[0138]
当前车10与后车11之间的实际距离d(k)小于等于最小允许行车距离dmin(k) 时,并且coll_av
index
(k)小于coll_av
th1
时,防碰撞控制系统激活防碰撞控制动作,并 且开启预警灯,包括打开双闪灯和打开减速灯等。
[0139]
当前车10与后车11之间的实际距离d(k)小于等于最小允许行车距离dmin(k) 时,coll_av
index
(k)大于等于coll_av
th1
并且小于coll_av
th2
时,防碰撞控制系统激活防 碰撞控制动作,并且首先判断路面交通环境是否允许前车10加速以致v
l
(k)≥vf(k),当 路面交通环境允许前车10加速以致v
l
(k)≥vf(k)时,防碰撞控制系统控制车辆加速;当 路面交通环境不允许前车10加速时,判断路面交通环境是否允许前车10从当前车道变 换至邻近车道,当路面交通环境允许前车10从当前车道变换至邻近车道时,防碰撞控 制系统控制车辆从当前车道变换至邻近车道;当路面交通环境不允许前车10从当前车 道变换至邻近车道时,防碰撞控制系统控制车辆启动驾乘人员保护装置以启动安全动 作,控制安全带预紧器将安全带收紧、打开安全气囊并且关闭车窗,保护车辆。
[0140]
当前车10与后车11之间的实际距离d(k)小于最小允许行车距离dmin(k)时, 并且coll_av
index
(k)大于等于coll_av
th2
时,防碰撞控制系统控制车辆启动驾乘人员保 护装置,控制安全带预紧器将安全带收紧、打开安全气囊并且关闭车窗,保护车辆。
[0141]
根据本技术实施例的可读存储介质,可读存储介质上存储有可在处理器上运行的防 碰撞控制策略程序,防碰撞控制策略程序被处理器执行时实现上述的防碰撞控制策略的 步骤。
[0142]
根据本技术实施例的防碰撞控制系统12包括:控制中心120、侧方位传感器28、 后方传感器32、和前车速度传感器。侧方位传感器28设置在车辆的左右两侧且分别与 控制中心120通讯连接,后方传感器32设置在车辆的后方且与控制中心120通讯连接, 后方传感器32用于检测前车10与后车11之间的距离,前车速度传感器适于检测前车10的车速且与控制中心120通讯连接。具体地,侧方位传感器28和后方传感器32均为 摄像头。
[0143]
控制中心120为防碰撞控制系统12的总控制元件,不但可用于接收各个传感器的 数据,还可根据数据计算前车10从当前车道变换至邻近车道所需要的时长等参数,并 且根据参数对车辆进行控制。
[0144]
控制中心120包括处理器,控制中心120中的处理器可运行可读存储介质上的防碰 撞控制策略程序,以执行防碰撞控制策略的步骤。
[0145]
在一些实施例中,控制中心120硬件组成包括一个或多个数位计算机,其配有一个 微处理器或中央处理器(cpu)、只读存储器(rom)、随机存取存储器(ram)、电可编程 序只读存储器(eprom)、高速时钟、模拟数字转换(a/d)和数字模拟转换(d/a)电路、输 入/输出电路和装置(i/o)和适当信号调节和缓冲电路。
[0146]
在一些实施例中,控制中心120包含一个安装于车辆乘员舱仪表的运算装置,控制 中心120也能安装于车辆其它位置。论及各种不同传感器和输入时,本发明部分实施例 仅采用单一子设备型的传感器和输入。
[0147]
侧方位传感器28设置在车辆的左右两侧,用于测量当前车道与邻近车道之间的距 离,后方传感器32用于检测前车10与后车11之间的距离,侧方位传感器28、后方传 感器32和前车速度传感器用于向控制中心120提供计算前车10从当前车道变换至邻近 车道所需要的时长、前车10和后车11之间的最小允许行车距离和前车10与后车11之 间的距离等参数。
[0148]
在一些实施例中,如图6所示,防碰撞控制系统12还包括:分别与控制中心120 通讯连接的后方雷达16和前方雷达,后方雷达16设置在车辆的后侧且适于朝向车辆的 后方发射雷达波束,前方雷达设置在车辆的前侧且适于朝向车辆的前方发射雷达波束。
[0149]
可选地,前方雷达包括:第一雷达30和第二雷达26,第一雷达30和第二雷达26 分别向车辆的正前方和侧前方发射雷达波束。
[0150]
后方雷达16和前方雷达辅助用于检测当前车道与邻近车道之间的距离、前车10与 后车11之间的距离、前车10以及后车11的速度,进一步提高计算精度,提升防碰撞 控制系统12的精确性。
[0151]
在一些实施例中,防碰撞控制系统12还包括:分别与控制中心120相连的转向角 传感器、加速度传感器、轮速传感器、惯量检测单元、档位传感器、油门踏板位置传感 器和制动踏板位置传感器,可用于检测驾驶员输入或车辆动态参数,其包括整车侧向加 速度、纵向加速度、车轮转角、转向扭矩、转向方向、横摆角速度、侧向速度和纵向速 度、车轮滚动速度和加速度、以及车辆的其它动态特征参数。
[0152]
在本技术的一些实施例中,防碰撞控制系统12还包括:双闪警示灯、制动灯、安 全带预紧器、安全气囊、电动车窗电机,当检测到后车11即将追尾碰撞前车10时,控 制中心120可操控这些装置。
[0153]
根据本技术实施例的车辆,包括上述任一项的防碰撞控制系统12,通过应用防碰撞 控制系统12,车辆可在后方车辆具有追尾倾向时及时向驾驶员预警,并且执行防止后方 车辆追尾的动作以规避危险,提升车辆驾驶的安全性。
[0154]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示 例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结 构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术 语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材 料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0155]
尽管已经示出和描述了本技术的实施例,本领域的普通技术人员可以理解:在不脱 离本技术的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型, 本技术的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1