一种车门控制方法及系统与流程
1.本发明实施例涉及车辆技术领域,尤其涉及一种车门控制方法及系统。
背景技术:
2.随着车辆自动化技术的快速发展,电动车门应用越来越广泛。电动车门包括滑动开门和电动侧开门,电动侧开门在开启时需要控制车门悬停的位置和助力效果。
3.目前,对电动侧开门的控制需要在车门运行过程中,对车门受到的扰动力进行识别,再建立数学模型,确定电机的扭矩,但是不同批次的车门执行部件,扭矩特性会存在差异,而且需要设置多个传感器进行扰动力的检测,会导致侧开门的悬停位置和助力效果存在偏差,难以准确控制电动侧开门的运行。
技术实现要素:
4.本发明提供一种车门控制方法及系统,以实现准确控制电动侧开门的运行。
5.第一方面,本发明实施例提供了一种车门控制方法,车门控制方法包括:
6.对车门的扰动力进行标定;其中,所述扰动力至少包括摩擦力、重力和风力;
7.根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,所述工作模式至少包括悬停模式、助力模式和电动模式;
8.根据所述工作模式确定车门工作效果;
9.根据所述工作模式、所述扰动力、所述当前车门状态和所述车门工作效果确定所述车门的电机的目标电压信息;
10.根据所述目标电压信息控制所述电机运转,以使所述电机带动所述车门运行。
11.可选地,在根据输入指令和/或当前车门状态确定车门运行时的工作模式之前,还包括:
12.获取所述输入指令和/或所述当前车门状态;
13.其中,获取所述当前车门状态包括:
14.根据当前电机状态、扰动力和车身姿态确定当前车门状态;所述当前电机状态至少包括当前电机电流。
15.可选地,根据所述工作模式、所述扰动力、所述当前车门状态和所述车门工作效果确定所述车门的电机的目标电压信息包括:
16.根据所述工作模式、所述扰动力、所述当前车门状态和所述车门工作效果确定车门的电机的目标电流信息;
17.根据所述目标电流信息确定所述目标电压信息。
18.可选地,根据所述工作模式、所述扰动力、所述当前车门状态和所述车门工作效果确定车门的电机的目标电流信息包括:
19.确定所述工作模式为悬停模式时,确定目标悬停位;
20.根据所述当前车门状态确定所述车门的悬停方式;其中,所述悬停方式包括紧急
悬停和平顺悬停;
21.根据所述目标悬停位和所述悬停方式确定车门运行轨迹;
22.根据所述车门运行轨迹、所述扰动力、所述当前车门状态和所述车门工作效果确定所述电机的目标速度;
23.根据所述目标速度和当前电机电流确定所述目标电流信息。
24.可选地,根据所述目标速度和当前电机电流确定所述目标电流信息包括:
25.对所述目标速度和所述当前电机电流进行模糊处理和比例积分调节,确定所述目标电流信息。
26.可选地,对所述目标速度和所述当前电机电流进行模糊处理和比例积分调节,确定所述目标电流信息包括:
27.根据所述目标速度得到目标加速度;
28.对所述目标速度和所述目标加速度进行模糊处理,得到比例参数和积分参数;
29.对所述目标速度、所述比例参数、所述积分参数与所述当前电机电流进行比例积分调节,确定所述目标电流信息。
30.可选地,根据所述工作模式、所述扰动力、所述当前车门状态和所述车门工作效果确定车门的电机的目标电流信息包括:
31.确定所述工作模式为助力模式时,确定助力参数;
32.根据所述助力参数、扰动力、所述当前车门状态和所述车门工作效果确定所述车门的电机的目标电流信息。
33.可选地,根据所述工作模式、所述扰动力、所述当前车门状态和所述车门工作效果确定车门的电机的目标电流信息包括:
34.确定所述工作模式为电动模式时,规划所述车门的运行轨迹;
35.根据所述运行轨迹确定所述车门的目标位置和目标速度;
36.根据所述目标位置、目标速度、所述当前电机状态、所述扰动力、所述当前车门状态和所述车门工作效果确定所述车门的电机的目标电流信息。
37.可选地,根据所述电流信息确定所述目标电压信息包括:
38.根据所述目标电流信息确定直流电压信息;
39.将所述直流电压信息转换为空间交流电压信息;
40.将所述空间交流电压信息转换为空间矢量脉宽调制信息;
41.根据所述空间矢量脉宽调制信息确定所述目标电压信息。
42.第二方面,本发明实施例还提供了一种车门控制系统,该车门控制系统包括:控制器和电机;
43.所述控制器用于对车辆的扰动力进行标定;其中,所述扰动力至少包括摩擦力、重力和风力;
44.所述控制器还用于根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,所述工作模式至少包括悬停模式、助力模式和电动模式;
45.所述控制器还用于根据所述工作模式确定车门工作效果;
46.所述控制器还用于根据所述工作模式、所述扰动力、所述当前车门状态和所述车门工作效果确定所述车门的电机的目标电压信息;
47.所述控制器与所述电机电连接,所述控制器还用于根据所述目标电压信息控制所述电机运转,以使所述电机带动所述车门运行。
48.本发明中,通过在车辆出厂前,先对车门所受的扰动力进行标定,控制器根据输入指令可以确定车门运行时的工作模式为助力模式还是电动模式;如果控制器确定当前工作模式为电动模式,且根据当前车门状态确定车门接近目标悬停位,或当前车门状态为车门附近有障碍物,控制器可以确定车门运行时的工作模式为悬停模式,确定工作模式后可以确定车门工作效果,控制器可以根据车门运行时的工作模式、扰动力、当前车门状态和车门工作效果确定车门的电机的目标速度,再根据电机的目标速度确定电机的目标电压信息,便于对电机进行控制,使得电机可以按照工作模式带动车门运行。根据车门工作效果、当前车门状态和扰动力可以使得车门自适应力进行运行,无需过度依赖传感器数据,可以保证车门的悬停效果,可以实现对车门的准确控制;通过利用目标电压信息控制电机的运转,可以准确控制电动侧开门的运行,不会因为不同车门执行部件的扭矩特性存在差异而使车门的控制存在偏差。本发明解决了在车门运行过程中,对车门受到的扰动力进行识别,再建立数学模型,确定电机的扭矩,导致侧开门的悬停位置和助力效果存在偏差的问题,可以根据车门工作效果和出厂前标定的扰动力确定电机的力矩,从而确定目标电压信息,实现了自适应力的效果,达到了准确控制电动侧开门运行的效果。
附图说明
49.图1是本发明实施例提供的一种车门控制方法的流程图;
50.图2是本发明实施例提供的又一种车门控制方法的流程图;
51.图3是本实施例提供的车门受到的一种扰动力的示意图;
52.图4是本实施例提供的车门受到的又一种扰动力的示意图;
53.图5是本发明实施例提供的又一种车门控制方法的流程图;
54.图6是本发明实施例提供的图5中s350包括的目标电压信息确定方法的流程图;
55.图7是本发明实施例提供的图6对应的目标电压信息确定方法的原理图;
56.图8是本发明实施例提供的一种空间矢量脉宽调制信息的示意图;
57.图9是本发明实施例提供的又一种车门控制方法的流程图;
58.图10是本发明实施例提供的一种车门悬停自适应扰动力的曲线图;
59.图11是本发明实施例提供的又一种车门控制方法的流程图;
60.图12是本发明实施例提供的图11中s590包括的目标电流信息确定方法的流程图;
61.图13是本发明实施例提供的图12对应的目标电流信息确定方法的原理图;
62.图14是本发明实施例提供的又一种车门控制方法的流程图;
63.图15是本发明实施例提供的又一种车门控制方法的流程图;
64.图16是本发明实施例提供的一种车门运行轨迹的示意图;
65.图17是本发明实施例提供的一种车门控制系统的结构示意图。
具体实施方式
66.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便
于描述,附图中仅示出了与本发明相关的部分而非全部结构。
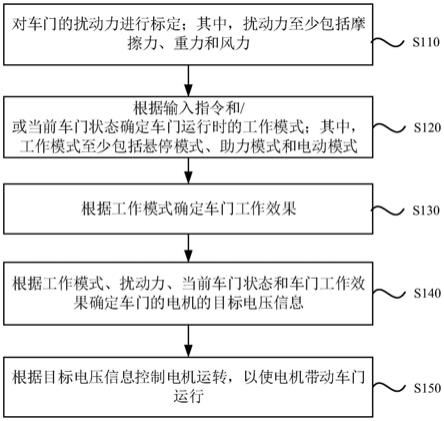
67.图1是本发明实施例提供的一种车门控制方法的流程图,参见图1,车门控制方法包括:
68.s110、对车门的扰动力进行标定;其中,扰动力至少包括摩擦力、重力和风力。
69.具体地,车门例如为车辆的侧开门,在车辆出厂前,先对不同场景下,车门所受的扰动力进行标定,可以通过传感器检测车门在不同场景下所受的各个力,再通过建模的方式确定车门所受的扰动力的大小,扰动力例如为摩擦力、重力和风力的合力,扰动力还可以包括其他力,此处并不进行限定。
70.例如,分别对不同摩擦力场景、不同重力场景和不同风力场景进行建模,从而在出厂前对车门的扰动力进行标定,无需再车辆运行过程中对车门所受的扰动力进行检测,可以减少车辆上设置的传感器的数量,从而可以降低成本,对不同场景的扰动力进行标定,可以使得对车辆的控制适应不同的工况和地形。而且,如果在车辆运行时,再对车门所受的力进行检测,受到的干扰较多,抗干扰性能较差,无法准确确定车门所受的扰动力,从而影响悬停和助力效果,可靠性差,复杂性高。因此,在车辆出厂前,对车门所受的扰动力进行标定,可以准确确定车门所受的扰动力,从而保证悬停和助力效果,提高控制的准确性和可靠性。
71.s120、根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,工作模式至少包括悬停模式、助力模式和电动模式。
72.具体地,车门例如为车辆的侧开门,车门的运行是指车门的开启或关闭,车门运行时的工作模式例如包括悬停模式、助力模式和电动模式,助力模式是指在用户开启或关闭车门时,为用户助力,使得用户可以轻松开启或关闭车门;电动模式是指用户通过钥匙等按下开门或关门按钮时,车门自动开启或关闭;悬停模式是指控制车门悬停在目标悬停位,例如在电动模式下,如果车门接近目标悬停位时,控制器就会控制车门的工作模式进入悬停模式,从而控制车门悬停在目标悬停位。
73.用户可以输入指令选择车门运行时的工作模式为助力模式或电动模式,控制器根据输入指令就可以确定车门运行的工作模式为助力模式还是电动模式;并且,如果控制器确定当前工作模式为电动模式,且根据当前车门状态确定车门接近目标悬停位,或当前车门状态为车门附近有障碍物,控制器就会控制车门的工作模式进入悬停模式,控制车门悬停在目标悬停位,控制器就可以确定车门进入悬停模式。
74.并且,根据当前车门状态可以判断是否有力作用于车门,还可以判断当前车门的运行方向,即判断是否有人开启或关闭车门,如果有力作用于车门,且车门运行方向为开门的方向,控制器就会控制车门进入电动模式,进行自动开门;如果有力作用于车门,且车门运行方向为关门的方向,控制器就会控制车门进入电动模式,进行自动关门,从而可以识别开关门动作,根据开关门动作进行相应的工作模式。
75.s130、根据工作模式确定车门工作效果。
76.具体地,车门工作效果为目标工作效果,当车门的工作模式为悬停模式时,确定车门工作效果,即确定车门的悬停效果,悬停效果例如可以包括悬停的目标位置;当车门的工作模式为助力模式时,确定车门工作效果,即确定车门的助力效果,助力效果例如可以包括较轻盈开门和超轻盈开门,较轻盈开门是指用户只需较小的力即可开启或关闭车门,超轻
盈开门是指用于只需很小的力即可开启或关闭车门。
77.s140、根据工作模式、扰动力、当前车门状态和车门工作效果确定车门的电机的目标电压信息。
78.具体地,控制器可以根据车门运行时的工作模式、扰动力、当前车门状态和车门工作效果确定车门的电机的目标速度,例如当车门的工作模式为助力模式时,根据用户选择的助力效果和需要克服的扰动力,可以确定助力所需的力的大小,根据力的大小即可计算出电机的目标速度,再根据电机的目标速度确定电机的目标电压信息,便于对电机进行控制,使得电机可以按照工作模式带动车门运行。并且,根据车门工作效果、当前车门状态和扰动力可以使得车门自适应力进行运行,例如当车门工作效果为较轻盈开门时,根据当前车门状态确定车门运行的速度不符合较轻盈开门的效果,即当前的车门运行不符合车门工作效果,就可以根据车门工作效果和扰动力对电机的目标电压信息进行调节,从而使得车门可以自适应力。而且根据车门工作效果对目标电压信息进行调节,可以保证较佳的车门工作效果,无需对用户的手在车门上的作用点进行监测,可以减小人手作用门上的位置不同而引起的偏差。例如当工作模式为悬停模式,当控制车门悬停在目标位置时,如果风力变大,车门移动,根据当前车门状态即可判断车门不符合车门工作效果,就会对目标电压信息进行调节,使得车门悬停在目标位置,从而可以保证车门的悬停效果,无需对车门所受的风力进行检测,而且,如果只根据风力进行控制,风力情况难以有效扑捉,根据风力控制的悬停效果不佳,控制偏差会随风力增大而增加,而本实施例的技术方案,根据车门工作效果和当前车门状态对目标电压信息进行调节,无需过度依赖传感器数据,可以保证车门的悬停效果,可以实现对车门的准确控制。
79.s150、根据目标电压信息控制电机运转,以使电机带动车门运行。
80.具体地,电机例如为无刷直流电机(brushless direct current motor,bldcm)或永磁同步电机(permanent magnetic synchronous machin,pmsm),控制器例如为变频控制器,变频控制器根据目标电压信息控制电机运转,电机带动车门运行,实现对车门的控制,通过利用目标电压信息控制电机的运转,可以准确控制电动侧开门的运行,不会因为不同车门执行部件的扭矩特性存在差异而使车门的控制存在偏差,解决了直接控制电机的输出扭矩,导致侧开门的悬停位置和助力效果存在偏差的问题。并且,无刷直流电机和永磁同步电机的使用寿命较长,效率更高,使得车门控制系统的寿命较长,提高对车门的控制效率。
81.其中,目标电压信息包括空间矢量电压,可以更准确的控制电机的运转,从而实现对车门的准确控制。
82.通过确定目标电压信息,根据目标电压信息控制电机进行运转,电机旋转较小的角度时,对目标电压信息的调节可能经历多次,从而可以实现微观视角的控制。
83.本实施例的技术方案,通过在车辆出厂前,先对车门所受的扰动力进行标定,控制器根据输入指令可以确定车门运行时的工作模式为助力模式还是电动模式;如果控制器确定当前工作模式为电动模式,且根据当前车门状态确定车门接近目标悬停位,或当前车门状态为车门附近有障碍物,控制器可以确定车门运行时的工作模式为悬停模式,确定工作模式后可以确定车门工作效果,控制器可以根据车门运行时的工作模式、扰动力、当前车门状态和车门工作效果确定车门的电机的目标速度,再根据电机的目标速度确定电机的目标电压信息,便于对电机进行控制,使得电机可以按照工作模式带动车门运行。根据车门工作
效果、当前车门状态和扰动力可以使得车门自适应力进行运行,无需过度依赖传感器数据,可以保证车门的悬停效果,可以实现对车门的准确控制;通过利用目标电压信息控制电机的运转,可以准确控制电动侧开门的运行,不会因为不同车门执行部件的扭矩特性存在差异而使车门的控制存在偏差。本实施例的技术方案解决了在车门运行过程中,对车门受到的扰动力进行识别,再建立数学模型,确定电机的扭矩,导致侧开门的悬停位置和助力效果存在偏差的问题,可以根据车门工作效果和出厂前标定的扰动力确定电机的力矩,从而确定目标电压信息,实现了自适应力的效果,达到了准确控制电动侧开门运行的效果。
84.图2是本发明实施例提供的又一种车门控制方法的流程图,可选地,参见图2,车门控制方法包括:
85.s210、对车门的扰动力进行标定;其中,扰动力至少包括摩擦力、重力和风力。
86.s220、获取输入指令和/或当前车门状态;
87.其中,获取当前车门状态包括:
88.根据当前电机状态、扰动力和车身姿态确定当前车门状态;当前电机状态至少包括当前电机电流。
89.具体地,控制器在判断车门运行时的工作模式时,先获取输入指令和/或当前车门状态,用户可以根据钥匙或按钮等输入指令,获取输入指令为获取钥匙或按钮的输入指令,控制器就可以根据输入指令确定车门的工作模式为助力模式还是电动模式。
90.控制器可以根据当前电机电流等参数确定电机的转子位置,从而确定当前车门的位置,还可以根据扰动力确定当前车门所受的外力,还可以结合车身姿态确定当前车门状态,便于对当前车门所受的外力进行分析,使得车门可以适应不同的位置工况;其中,车身姿态至少包括车身倾斜角度和俯仰角度,车身姿态可以从车辆总线或传感器值获取,传感器值还可以包括异物检测值,根据异物检测值可以确定车门附近是否存在障碍物,便于确定当前车门状态,控制器可以根据当前车门状态确定车门是否进入悬停模式,例如当前车门状态为车门接近目标悬停位,或当前车门状态为车门附近有障碍物,控制器就可以确定车门的工作模式进入悬停模式。
91.通过从车辆总线获取车身姿态可以减少传感器的设置,降低成本。
92.其中,扰动力例如包括风力、摩擦力和重力等,图3是本实施例提供的车门受到的一种扰动力的示意图,参见图3,扰动力f1为车门1受到的风力,扰动力f2为车门1受到的摩擦力,图4是本实施例提供的车门受到的又一种扰动力的示意图,参见图4,图4示出了车辆在斜坡上的情况,扰动力f3为车门1受到的重力,从而实现对车门所受扰动力的分析,实现对车门处于不同位置的受力分析,便于对不同工况的车门进行控制,车门所受的扰动力还可以包括其他力,此处并不进行限定。其中,传感器值由传感器采集得到的,传感器例如为陀螺仪,陀螺仪可以检测车身的倾斜角度,从而确定车门的倾斜角度,从而便于确定当前车门状态。需要说明的是,传感器是可选择性配置的,不是必须设置的。
93.s230、根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,工作模式至少包括悬停模式、助力模式和电动模式。
94.s240、根据工作模式确定车门工作效果。
95.s250、根据工作模式、扰动力、当前车门状态和车门工作效果确定车门的电机的目标电压信息。
96.s260、根据目标电压信息控制电机运转,以使电机带动车门运行。
97.图5是本发明实施例提供的又一种车门控制方法的流程图,可选地,参见图5,车门控制方法包括:
98.s310、对车门的扰动力进行标定;其中,扰动力至少包括摩擦力、重力和风力。
99.s320、根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,工作模式至少包括悬停模式、助力模式和电动模式。
100.s330、根据工作模式确定车门工作效果。
101.s340、根据工作模式、扰动力、当前车门状态和车门工作效果确定车门的电机的目标电流信息。
102.具体地,控制器可以根据车门运行时的工作模式、扰动力、当前车门状态和车门工作效果确定车门的电机的目标速度,例如当车门的工作模式为助力模式时,根据用户选择的助力效果,可以确定助力所需的力的大小,根据力的大小即可计算出电机的目标速度,根据电机的目标速度可以确定电机运转所需的目标电流信息。
103.此外,当前车门状态还可以包括车门是否受到外力,或者车门处是否有人存在,当车门受到外力时,表明有人触碰车门,这时,确定车门的电机的目标电流信息为零,控制车门停止运行,避免夹到用户,达到了防夹的效果。
104.而且,根据当前车门状态可以调节目标电流信息,如果当前车门状态为车门快速运行,就可以调节目标电流信息,使得车门的速度较小,使得车门的速度小于预设速度,车门的加速度小于预设加速度,避免出现摔门的现象,达到了防摔的效果。
105.s350、根据目标电流信息确定目标电压信息。
106.具体地,控制器可以将目标电流信息转换为空间矢量脉冲调制(space vector pulse width modulation,svpwm)信息,根据空间矢量脉冲调制信息可以确定电机运转所需的目标电压信息。
107.s360、根据目标电压信息控制电机运转,以使电机带动车门运行。
108.在上述技术方案的基础上,图6是本发明实施例提供的图5中s350包括的目标电压信息确定方法的流程图,图7是本发明实施例提供的图6对应的目标电压信息确定方法的原理图,可选地,参见图6和图7,s350、根据电流信息确定目标电压信息包括:
109.s351、根据目标电流信息确定直流电压信息。
110.具体地,将计算的目标电流信息var作为第一输入量,将电机出厂时标定的标定电流const作为第二输入量,可以通过比例积分pi调节将目标电流信息var转换为第一直流电压信息vt,在比例积分pi调节时可以输入补偿量comp,所以利用比例积分pi调节可以得到更准确的第一直流电压信息vt,并通过比例积分pi调节将标定电流const转换为第二直流电压信息vf。
111.s352、将直流电压信息转换为空间交流电压信息。
112.具体地,将第一直流电压信息vt转换为第一空间交流电压信息ua,将第二直流电压信息vf转换为第二空间交流电压信息ub,从而实现将直流电压信息转换为空间交流电压信息。
113.s353、将空间交流电压信息转换为空间矢量脉宽调制信息。
114.具体地,根据第一空间交流电压信息ual和第二空间交流电压信息ube可以得到目
标频率对应的空间矢量脉宽调制信息。图8是本发明实施例提供的一种空间矢量脉宽调制信息的示意图,参见图8,通过控制空间矢量脉宽调制信息的频率,可以对电机的电压进行调节,从而实现变频控制。
115.s354、根据空间矢量脉宽调制信息确定目标电压信息。
116.具体地,利用空间矢量脉宽调制信息可以对电机的逆变器进行控制,使得电机的逆变器输出目标电压信息至电机,例如是输出abc三相目标电压信息至电机,使得电机可以根据目标电压信息进行运转,从而带动车门运行。
117.在确定目标电压信息后,将目标电压信息发送至电机,使得电机按照目标速度运转,可以采集电机的信息,例如包括电机的三相电流信息iabc、速度信息wm和角度信息the,并且可以通过转换器件transform将三相电流信息iabc转换为空间电流信息,通过空间电流信息、速度信息wm和角度信息the可以对电机进行状态估算(status observe),以实现获取当前电机状态。
118.图9是本发明实施例提供的又一种车门控制方法的流程图,可选地,参见图9,车门控制方法包括:
119.s410、对车门的扰动力进行标定;其中,扰动力至少包括摩擦力、重力和风力。
120.s420、获取输入指令和/或当前车门状态;
121.其中,获取当前车门状态包括:
122.根据当前电机状态、扰动力和车身姿态确定当前车门状态;当前电机状态至少包括当前电机电流。
123.s430、根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,工作模式至少包括悬停模式、助力模式和电动模式。
124.s440、根据工作模式确定车门工作效果。
125.s450、确定工作模式为悬停模式时,确定目标悬停位。
126.具体地,当控制器确定车门运行的工作模式为悬停模式时,确定目标悬停位,例如可以根据电动模式中确定的车门运行轨迹确定目标悬停位,也可以根据电动模式中确定的车门目标位置确定目标悬停位,目标悬停位也可以由用户输入。
127.s460、根据当前车门状态确定车门的悬停方式;其中,悬停方式包括紧急悬停和平顺悬停。
128.示例性的,当控制器确定当前车门状态为车门附近有障碍物时,确定车门的悬停方式为紧急悬停,紧急悬停时车门运行的速度和加速度较大,可以使得车门较快的到达目标悬停位;当控制器确定当前车门状态为车门附近无障碍物时,可以确定车门的悬停方式为平顺悬停,平顺悬停是车门运行的速度和角速度较小,使得车门可以平缓的到达目标悬停位。
129.s470、根据目标悬停位和悬停方式确定车门运行轨迹。
130.具体地,车门运行轨迹例如是在车辆出厂时存储在控制器内,控制器内可以存储多种车门运行轨迹,以供控制器和用户进行选择,例如当前车门状态为车门开启角度为40
°
,目标悬停位为车门开启角度为60
°
,且悬停方式为平顺悬停时,由于当前车门位置距离目标悬停位较远,可以选用速度和加速度较小的车门运行轨迹;当前车门状态为车门开启角度为55
°
,目标悬停位为车门开启角度为60
°
,且悬停方式为平顺悬停时,由于当前车门位
置距离目标悬停位较近,可以选用速度较大、加速度较小的车门运行轨迹;当前车门状态为车门开启角度为48
°
,目标悬停位为车门开启角度为60
°
,且悬停方式为紧急悬停时,可以选用速度和加速度较大的车门运行轨迹。此外,如果目标悬停位所在位置有障碍物时,控制器可以重新确定目标悬停位,避免车门碰到障碍物,达到保护车门的效果。
131.s480、根据车门运行轨迹、扰动力、当前车门状态和车门工作效果确定电机的目标速度。
132.具体地,根据车门运行轨迹可以确定车门的目标悬停位置、速度、加速度和加加速度,再根据扰动力确定车门运行时需要克服的外力,根据车门的速度、加速度和扰动力可以确定需要施加给车门的目标力,并且可以根据当前车门状态和车门工作效果对目标力进行调节,根据车门的目标力可以确定电机的目标力矩,从而可以确定电机的目标速度。电机的目标速度可以是固定的数值,也可以是根据扰动力不断变化的,使得电机的目标速度可以自适应扰动力,即在悬停模式时,需要施加给车门的目标力是根据扰动力不断变化的,图10是本发明实施例提供的一种车门悬停自适应扰动力的曲线图,参见图10,在第一阶段t1,车门刚进入悬停模式,施加给车门的目标力较大,在第二阶段t2,车门到达目标悬停位,车门无需移动,车门的目标力接近0,在第三阶段t3,车门在悬停时受到外部力干扰,车门所需的目标力与外部力的大小相等,使得车门保持稳定悬停,从而实现了悬停过程中自适应扰动力,实现对车门的准确控制。
133.s490、根据目标速度和当前电机电流确定目标电流信息。
134.具体地,根据目标速度确定目标电流信息时,可以将当前电机电流作为负反馈,使得控制器可以更准确的确定目标电流信息,减小当前电机电流与目标电流信息的差值,从而更好的控制电机运转,更准确的控制电动侧开门的悬停位置。通过将当前电机电流作为反馈,可以实现对偏差值的调节,使得电机的实际电流可以与目标电流信息相符,实现对电机的准确控制。
135.s491、根据目标电流信息确定目标电压信息。
136.s492、根据目标电压信息控制电机运转,以使电机带动车门运行。
137.图11是本发明实施例提供的又一种车门控制方法的流程图,可选地,参见图11,车门控制方法包括:
138.s510、对车门的扰动力进行标定;其中,扰动力至少包括摩擦力、重力和风力。
139.s520、获取输入指令和/或当前车门状态;
140.其中,获取当前车门状态包括:
141.根据当前电机状态、扰动力和车身姿态确定当前车门状态;当前电机状态至少包括当前电机电流。
142.s530、根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,工作模式至少包括悬停模式、助力模式和电动模式。
143.s540、根据工作模式确定车门工作效果。
144.s550、确定工作模式为悬停模式时,确定目标悬停位。
145.s560、根据当前车门状态确定车门的悬停方式;其中,悬停方式包括紧急悬停和平顺悬停。
146.s570、根据目标悬停位和悬停方式确定车门运行轨迹。
147.s580、根据车门运行轨迹、扰动力当前车门状态和车门工作效果确定电机的目标速度。
148.s590、对目标速度和当前电机电流进行模糊处理和比例积分调节,确定目标电流信息。
149.具体地,利用模糊控制系统对目标速度进行模糊处理,可以是先对目标速度和加速度进行模糊化,再根据fuzzy算法进行计算,然后进行解模糊,输出比例参数和积分参数,根据比例参数和积分参数对目标速度进行比例积分调节,并且在进行比例积分调节时,将当前电机电流作为负反馈输入,确定目标电流信息,可以减小目标电流信息的误差,从而可以更准确的控制电机的运转,实现对电动侧开门的准确控制。
150.s591、根据目标电流信息确定目标电压信息。
151.s592、根据目标电压信息控制电机运转,以使电机带动车门运行。
152.在上述技术方案的基础上,图12是本发明实施例提供的图11中s590包括的目标电流信息确定方法的流程图,图13是本发明实施例提供的图12对应的目标电流信息确定方法的原理图,可选地,参见图12和图13,s590、对目标速度和当前电机电流进行模糊处理和比例积分调节,确定目标电流信息包括:
153.s5901、根据目标速度得到目标加速度。
154.具体地,将目标速度作为输入量in,de/dt对目标速度进行微分处理,得到目标速度对应的目标加速度,再将目标速度和目标加速度输入fuzzy controller模糊控制进行模糊处理。
155.s5902、对目标速度和目标加速度进行模糊处理,得到比例参数和积分参数。
156.具体地,利用fuzzy controller模糊控制对目标速度和目标加速度进行模糊处理,可以是先对目标速度和加速度进行模糊化,再根据fuzzy算法进行计算,然后进行解模糊,输出比例参数dp和积分参数di。
157.s5903、对目标速度、比例参数、积分参数与当前电机电流进行比例积分调节,确定目标电流信息。
158.具体地,将目标速度、比例参数和积分参数进行比例积分调节,比例积分调节可以用pi controller比例积分控制器实现,输出目标电流信息至目标对象,目标对象为电机,在利用当前电机电流作为负反馈feedback输入到比例积分调节,可以减小输出的目标电流信息的偏差,从而可以更准确的确定目标电流信息。
159.图14是本发明实施例提供的又一种车门控制方法的流程图,可选地,参见图14,车门控制方法包括:
160.s610、对车门的扰动力进行标定;其中,扰动力至少包括摩擦力、重力和风力。
161.s620、获取输入指令和/或当前车门状态;
162.其中,获取当前车门状态包括:
163.根据当前电机状态、扰动力和车身姿态确定当前车门状态;当前电机状态至少包括当前电机电流。
164.s630、根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,工作模式至少包括悬停模式、助力模式和电动模式。
165.s640、根据工作模式确定车门工作效果。
166.s650、确定工作模式为助力模式时,确定助力参数。
167.具体地,当确定工作模式为助力模式时,可以先确定助力效果,助力效果例如为较轻盈开启或关闭车门,也可以为超轻盈开启或关闭车门,助力效果可以是用户选择的,当用户未选择时,可以按照默认助力效果进行助力,根据助力效果可以确定助力参数,可以确定助力所需的力的大小。
168.s660、根据助力参数、扰动力、当前车门状态和车门工作效果确定车门的电机的目标电流信息。
169.具体地,根据当前车门状态可以确定当前车门位置,根据助力参数、扰动力和当前车门位置可以确定电机的目标力矩,并且判断当前车门状态是否满足车门工作效果,如果当前车门状态不满足车门工作效果时,可以根据车门工作效果对目标力矩进行调节,根据电机的目标力矩可以确定电机的目标电流信息,从而实现利用车门工作效果对目标电流信息进行修正,可以减小目标电流信息的误差,更准确的实现车门工作效果,实现对车门的准确控制。
170.示例性的,当车门的工作模式为助力模式时,车门工作效果为助力效果,助力效果例如为无极变速助力,即车门在运行过程中,速度缓慢增大,助力效果可以为无极变力助力,即车门在运行过程中,为用户提供的力的大小是缓慢增大的,可以实现更好的助力,避免助力变化较大时,对用户和车门造成损坏。
171.s670、根据目标电流信息确定目标电压信息。
172.s680、根据目标电压信息控制电机运转,以使电机带动车门运行。
173.图15是本发明实施例提供的又一种车门控制方法的流程图,可选地,参见图15,车门控制方法包括:
174.s710、对车门的扰动力进行标定;其中,扰动力至少包括摩擦力、重力和风力。
175.s720、获取输入指令和/或当前车门状态;
176.其中,获取当前车门状态包括:
177.根据当前电机状态、扰动力和车身姿态确定当前车门状态;当前电机状态至少包括当前电机电流。
178.s730、根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,工作模式至少包括悬停模式、助力模式和电动模式。
179.s740、根据工作模式确定车门工作效果。
180.s750、确定工作模式为电动模式时,规划车门的运行轨迹。
181.具体地,当按下车钥匙的开门按钮或者门把手上的开门按钮时,可以确定车门运行的工作模式为电动模式,然后对车门的运行轨迹进行规划,车门的运行轨迹例如是在车辆出厂时存储在控制器内,控制器内可以存储多种车门运行轨迹,以供控制器和用户进行选择,图16是本发明实施例提供的一种车门运行轨迹的示意图,参见图16,车门刚开始运行时,速度和加速度都较小,车门运行过程中,速度越来越大,当车门接近目标位置时,车门速度较大,加速度很小,所以通过规划车门的运行轨迹,可以对车门的运行速度和加速度进行控制,车门具体的运行轨迹可以根据实际情况进行确定,图16中只示出了一种运行轨迹的情况,并不进行限定。
182.s760、根据运行轨迹确定车门的目标位置和目标速度。
183.具体地,根据车门的运行轨迹可以确定车门的目标位置,并且可以确定车门运行时的目标速度和车门的运行时的目标加速度,车门的目标速度和目标加速度可以是固定的数值,当目标速度为固定值时,车门匀速运行,当车门的目标加速度为固定值时,车门可以匀加速运行,车门的目标速度和目标加速度也可以不是固定的数值,可以根据实际情况进行确定,此处并不进行限定。
184.s770、根据目标位置、目标速度、当前电机状态、扰动力、当前车门状态和车门工作效果确定车门的电机的目标电流信息。
185.具体地,对目标位置和目标速度可以进行双环比例积分调节,得到目标电流信息,当前电机状态例如包括当前电机电流,可以将当前电机电流作为双环比例积分调节的负反馈,可以减小输出的目标电流信息的偏差,得到更准确的目标电流信息。并且可以根据扰动力对目标电流信息进行调节,还可以根据当前车门状态和车门工作效果对目标电流信息进行调节,可以减小目标电流信息的误差,更准确的实现车门工作效果,实现对车门的准确控制。
186.s780、根据目标电流信息确定目标电压信息。
187.s790、根据目标电压信息控制电机运转,以使电机带动车门运行。
188.图17是本发明实施例提供的一种车门控制系统的结构示意图,参见图17,车门控制系统包括:控制器810和电机820;控制器810用于对车辆的扰动力进行标定;其中,扰动力至少包括摩擦力、重力和风力;控制器810还用于根据输入指令和/或当前车门状态确定车门运行时的工作模式;其中,工作模式至少包括悬停模式、助力模式和电动模式;控制器810还用于根据工作模式确定车门工作效果;控制器810还用于根据工作模式、扰动力、当前车门状态和车门工作效果确定车门的电机的目标电压信息;控制器810与电机820电连接,控制器810还用于根据目标电压信息控制电机820运转,以使电机820带动车门运行。
189.本实施例提供的车门控制系统可以实现上述实施方案的车门控制方法,本实施例提供的车门控制系统实现原理和技术效果与上述实施方案类似,此处不再赘述。
190.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1