用于管理车辆操作的控制器和方法与流程
用于管理车辆操作的控制器和方法
1.相关申请的交叉引用
2.本技术涉及并要求2021年1月29日提交的题为“用于管理车辆操作的系统和方法(system and method for managing vehicle operations)”的美国临时申请第63/143,116号的优先权权益,所述美国临时申请据此通过引用整体并入。
技术领域
3.本文中的主题描述了与车辆控制操作相关的实施例。
背景技术:
4.在使用车辆系统将货物从接货位置(pickup location)运输到卸货位置(drop-off location)之前,为车辆系统规划行程来完成任务。行程指代并包括所分配的约束,如接货位置、卸货位置以及到达卸货位置的预定到达时间。行程可指代并包括关于以下的特性:货物;车辆系统;以及车辆系统要在接货位置与卸货位置之间行驶的一条或多条路线。对于每个行程,如果车辆系统上没有至少一定量的可用能量用于推进并且车辆系统在给定时间没有至少一定瞬时功率可用于推进和辅助负载(如车灯、hvac、压缩空气等),则车辆系统将无法按计划完成预定行程。例如,车辆系统可能由于用光燃料或耗尽储存能量而完全无法到达卸货位置,或者车辆系统可能仍然能够完成行程,但无法根据所分配的约束完成(例如,可能在预定到达时间之后到达)。此外,即使最初车辆系统上的可用能量和瞬时功率足以使车辆系统按计划完成行程,但在行程期间也可能发生显著减少可用能量和/或瞬时功率的各种事件。例如,在行程期间,车辆系统上与推进相关联的一个或多个组件可能发生故障,这会降低车辆系统的功率输出能力。在另一示例中,由外部事件,如交通事故、车辆被困、路线损坏、由于交通信号灯引起的计划外的减速或停车、阻力变化(例如,由于风、雪、雨)等引起的延迟可能使车辆系统长时间空转,这会减少车辆系统上的能量供应,从而减少可用于推进的能量。
5.在进行行程规划时,决定如何驱动车辆系统是一项不精确的基本任务。为了确保有足够的能量和功率可用于按计划完成行程,可以保守地为车辆系统配备比完成规划行程所需的能量和功率多得多的能量和功率。在铁路修筑的情况下,可以将四个或更多个柴油驱动的机车组装成一组或一个编组(consist)以推进列车。向车辆系统添加比所需更多的燃料和/或推进生成组件,如一个或多个完整机车,可能由于重量增加而降低行程效率并且可能增加排放、燃料消耗量和噪音。因此,可能期望具有与当前可用的系统和方法不同的系统和方法。
技术实现要素:
6.在一个或多个实施例中,一种用于管理车辆操作的方法包括:确定车辆系统在路线上完成规划行程的功率需求。所述方法包括通过将来自所述车辆系统的可用功率量与所确定的所述功率需求进行比较来确定所述可用功率量是否足以推进所述车辆系统完成所
述规划行程。所述方法还包括基于所述可用功率量与所确定的所述功率需求之间的所述比较来改变规划行程的一个或多个操作方面以生成新规划的经修改行程。
7.在一个或多个实施例中,一种控制器包括一个或多个处理器。所述一个或多个处理器被配置为确定车辆系统完成规划行程的功率需求并且通过随时间推移将来自所述车辆系统的可用功率量与所确定的所述功率需求进行比较来确定所述可用功率量是否足以推进所述车辆系统完成所述规划行程。所述一个或多个处理器被配置为至少部分地基于所述可用功率量与所确定的所述功率需求之间的所述比较来改变所述规划行程。
8.在一个或多个实施例中,一种用于管理车辆操作的方法包括:确定车辆系统在路线上完成规划行程的功率需求。所述方法包括通过将来自所述车辆系统的可用功率量与所确定的所述功率需求进行比较来确定所述可用功率量是否足以推进所述车辆系统完成所述规划行程。所述方法还包括基于所述可用功率量与所确定的所述功率需求之间的所述比较来改变规划行程的一个或多个操作方面以生成新规划的经修改行程。改变所述一个或多个操作方面包括以下中的一项或多项:用电池驱动的车辆代替所述车辆系统的燃料消耗性车辆;或改变所述车辆系统中包括的所述电池驱动的车辆的一个或多个操作方面。
附图说明
9.可以通过参考附图阅读以下对非限制性实施例的描述来理解本发明的主题,在附图中:
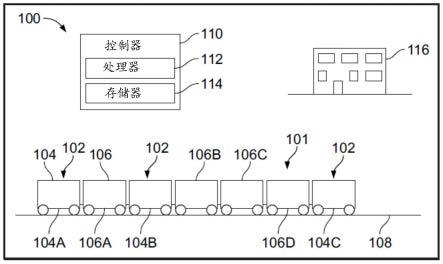
10.图1示出根据实施例的用于管理车辆系统和控制车辆系统在规划行程中的移动的控制系统;
11.图2是根据实施例的车辆系统的混合编组中的组件的示意性框图;
12.图3是绘制根据实施例的车辆系统为完成先前规划行程的功率需求作为时间的函数的曲线图;
13.图4是绘制根据图3中的实施例的车辆系统的先前规划行程期间在车辆系统的电能存储装置中储存的可用能量作为时间的函数的曲线图;
14.图5是绘制根据另一实施例的车辆系统为完成先前规划行程的功率需求作为时间的函数的曲线图;
15.图6是绘制根据图5中的实施例的车辆系统的先前规划行程期间在车辆系统的电能存储装置中储存的可用能量作为时间的函数的曲线图;以及
16.图7是根据实施例的用于改变车辆系统的规划行程和控制车辆系统在规划行程中的移动的方法的流程图。
具体实施方式
17.本文描述的实施例涉及用于管理车辆系统的系统和方法。这可能需要至少部分地基于车辆系统完成车辆系统的先前规划行程的功率和能量预算分析来改变先前规划行程。分析可包括确定车辆系统根据指定的约束为完成先前规划行程的作为时间的函数的功率需求。指定的约束可包括指定的起始位置和结束位置、预定的到达时间、完成行程的指定时间段、移动限制(例如,速度限制)、路线限制、由于负载产生的约束(例如,对负载的联接器的力/冲击约束)等。功率需求是指用于在规划行程期间沿一条或多条路线推进车辆系统的
功率输出。确定功率需求可包括基于能量、功率和时间的关系确定车辆系统完成规划行程所需的能量的量。分析还可包括确定在规划行程期间车辆系统可提供以驱动推进和必要辅助负载(作为时间的函数)的可用功率量以及车辆系统上用于推进和必要辅助负载的可用能量。然后,可以随时间推移将可用功率量与功率需求进行比较,并且两个特性之间的差异被一个或多个处理器用于改变先前规划行程。
18.分析可以是预测性的,因为作为时间的函数的可用功率可以在车辆系统沿规划行程行驶之前确定。例如,作为时间的函数的可用功率对在路线上行驶的车辆系统的给定推进单元或编组在车辆系统实际在路线上行驶之前的功率和能量能力进行建模。分析可以在行程规划过程期间如由调度设施处的一个或多个处理器执行。
19.通过随时间推移比较车辆系统完成规划行程的功率需求与车辆系统的可用功率如何不同,本文描述的系统和方法可修改规划行程的各方面以满足或增强某些目标,如增加能量效率、增加燃料经济性、在预定的到达时间完成行程、减少车辆系统中存在的燃料消耗性发动机和/或车辆的数量等。
20.在一个实施例中,基于分析,一个或多个处理器可以改变车辆系统的车辆构造以用至少一个电池驱动的车辆代替一个或多个燃料消耗性车辆,这可以减少燃料消耗量、排放和噪音并提高效率。在另一个非限制性示例中,如果分析指示对于按计划完成行程而言,在给定时间段的可用功率量相对于所述时间段期间的功率需求存在短缺,则一个或多个处理器可以改变行程以弥补短缺。可以通过采取措施来增加可用功率和/或降低给定时间段期间的功率需求从而补偿短缺。例如,可以通过重新分配车辆系统的不同电源在行程期间的功率输出、在制动期间捕获再生能量、连接到车外电源和/或改变车辆构造来增加可用功率。可以通过例如改变规划行程以包括一条或多条具有较小坡度和/或较大曲率半径的路线、延迟预定的到达时间和/或延长完成行程的指定时间段来降低给定时间段期间的功率需求。适当的车外电源,如接触网线路或第三轨道可以在车辆系统连续沿路线行驶以完成行程的同时,既推进车辆(减少车载能量储存系统上的负载),又对车载能量系统(如电池)进行再充电。
21.详细的功率和能量预算分析使得能够规划行程并控制车辆系统在完成行程所需的功率和能量与车辆系统上可用于完成行程的功率和能量之间的关联或匹配有所增强的情况下沿行程行驶。此类信息使得能够根据具体的规划行程对车辆系统(和车辆系统的移动)进行精确定制,这会避免为车辆系统配备过量的燃料和/或推进生成组件产生的效率成本,同时保持车辆系统可以按计划完成行程的信心。
22.图1示出根据实施例的用于改变规划行程和控制车辆系统101在规划行程中的移动的控制系统100。控制系统可以包括控制器110(例如,控制装置),所述控制器执行本文所描述的操作中的至少一些操作以改变先前规划行程。控制器表示硬件电路系统,所述硬件电路系统可以包括一个或多个处理器112(例如,一个或多个微处理器、集成电路、微控制器、现场可编程门阵列等)和/或可以与其连接。控制器可以包括有形的非暂时性计算机可读存储介质(例如,存储器)114和/或可以与其连接。例如,存储器可以存储经编程指令(例如,软件),所述经编程指令可以由所述一个或多个处理器执行以执行本文所描述的控制器的操作。附加地或可替代地,存储器可以存储不同信息,如:一个或多个传感器生成的传感器数据的日志或记录;路线数据库,所述路线数据库可以包括任选地具有坡度和曲率信息
以及移动约束(例如,速度、噪音和/或排放限制)的由一条或多条路线构成的地图;车辆数据库,所述车辆数据库存储与车辆系统上的车辆和推进生成组件和设备的类型或类别有关的信息;以及行程数据库,所述行程数据库可以包括车辆系统的一个或多个行程的时间表。
23.在各个实施例中,至少部分地取决于最终用途要求,控制器可以安置在车辆系统上或安置在车辆系统外。在一个实施例中,控制器可以完全安置在车辆系统上。在其它实施例中,控制器可以完全安置在可以位于车辆系统外的位置处,如安置在调度设施116处、安置在路旁装置处、安置在移动计算装置(例如,智能电话或膝上型计算机)上等。在又一个实施例中,控制器的第一部分可以定位在车辆系统上,而控制器的第二部分可以定位在车辆系统外,如定位在调度设施处。两个部分可以使用用于信号发射和接收的电路系统和天线彼此无线通信。
24.车辆系统可以包括在路线108上行驶的若干车辆104、106。车辆104(例如,车辆104a-c)表示生成牵引力或牵引功率以便沿路线推进车辆系统的推进生成车辆。车辆106(例如,车辆106a-d)表示不生成牵引力或牵引功率的非推进生成车辆。非推进生成车辆中的一些非推进生成车辆可以安置在推进生成车辆之间。推进生成车辆还包括推进系统。非推进生成车辆包括制动系统,但没有推进系统,使得推进生成车辆沿路线推进非推进生成车辆。车辆系统中的车辆的所示编号和布置被提供作为车辆系统的一种非限制性示例排列。车辆系统可以具有少至一个推进生成车辆和少至零个非推进生成车辆。车辆系统还可以包括比图1中所示的车辆更多的车辆。
25.图1中的车辆以一列纵队机械互连并且一起在路线上行驶。车辆可以通过联接器连接。尽管车辆系统中的车辆在图1中彼此机械联接,但在替代性实施例中,车辆中的至少一些车辆彼此机械分离(例如,未机械联接)。例如,机械分离的车辆可以通过无线通信链路逻辑地(例如,通信地)连接以使车辆移动彼此协调,从而使车辆系统的车辆能够在不彼此机械联接的情况下一起沿路线行驶。
26.在一个实施例中,车辆系统可以是基于轨道的列车,并且路线可以是铁路轨道,其中推进生成车辆是机车。图1所示的三个机车可以表示编组102。非推进生成车辆可以是运送货物和/或乘客的轨道车。在另一个非限制性实施例中,车辆系统可以是一排道路车辆,并且路线是道路或路径。例如,推进生成车辆可以是卡车(例如,公路半挂车、矿用卡车、测井车等),并且非推进生成车辆可以是联接到卡车的拖车。在其他实施例中,车辆系统可以是其他类型的车辆,如汽车、海洋船舶、飞行器等。各种术语可以互换地描述车辆系统,如群(swarm)、排(platoon)、编组、组、队(fleet)等。共同特征是车辆系统中的车辆中的至少一个车辆是根据本发明的实施例被控制的。车辆中的其余车辆可以被直接控制或可以简单地效仿所述一组车辆中的另一车辆。
27.在实施例中,车辆系统的编组是可以包括多于一种类型的车辆的混合编组和/或具有多于一个用于在路线上驱动车辆系统的推进和必要辅助负载的来源。适当的电源可以包括或表示燃料燃烧发动机、一个或多个燃料电池、一个或多个电存储装置等。电存储装置可以包括或表示电池单元、电容器(例如,超级电容器)等。例如,推进生成车辆104中的至少一个推进生成车辆可以具有第一电源,并且推进生成车辆中的至少另一个推进生成车辆可以具有类型或类别与第一电源不同的第二电源。第一电源可以是内燃机。第二电源可以是包括多个电池单元的电池组。在另一示例中,单个推进生成车辆可以是具有第一电源和不
同的第二电源两者的混合动力车辆,所述第一电源和第二电源均可以有助于推进车辆系统。包括并且仅依赖于燃料燃烧发动机或燃料电池来驱动推进和必要辅助负载的推进生成车辆在本文中被称为燃料消耗性车辆。包括并且利用来自车载电存储装置的电能来驱动推进和必要辅助负载的推进生成车辆被称为电池驱动的车辆。任选地,电池驱动的车辆可以是还可以包括燃料电池、发动机等的混合动力车辆。适当的发动机可以包括压燃式发动机类型和火花点火式发动机类型。适当的燃料可以连同对应发动机一起选择并且可以包括液态燃料和气态燃料中的一种或两种。适当的气态燃料可以包括氢气、液化天然气(lng)、丙烷、氨气等。适当的液态燃料可以包括柴油、汽油、煤油、二甲醚、醇等中的一种或多种。适当的柴油可包括常规柴油、hdrd、生物柴油等。适当的醇可包括甲醇、乙醇、丙醇、丁醇和其它短链醇以及可燃碳氢化合物中的一种或多种。
28.图2是根据实施例的车辆系统的混合编组202中的组件的示意性框图。混合编组202可以表示图1所示的车辆系统101的混合编组102。混合编组可以包括多种不同类型的电源203,所述电源可以用于驱动车辆系统的推进和必要辅助负载,所述电源包括一个或多个发动机204、燃料电池206和电存储装置208。适当的电存储装置可以包括电池单元210、电容器212等。在一个实施例中,电源定位在车辆外并且通过如无线能量输送装置、接触网线路和第三轨道之类的电源装置供应电力。不同的电源可以安置在不同的推进生成车辆上。发动机可以机械联接到一个或多个将机械能转换成电能的交流发电机214。从电源供应的电能可以选择性地引导到编组上的牵引电动机216。牵引电动机通过连杆机构机械联接到编组的车轴和车轮218并且将从电源接收到的电能转换成迫使车轴和车轮218旋转以推进车辆系统的机械能。如海洋船舶和飞行器等其它类型的车辆可以具有推进器或其它装置,而不是车轴和车轮。
29.编组可以包括一个或多个车辆控制器220,所述一个或多个车辆控制器控制电源的操作以及电源与牵引电动机之间的电能流动。例如,车辆控制器可以控制哪种类型的电源在给定时间段期间向牵引电动机供应电能以及向牵引电动机供应以使牵引电动机能够提供指定牵引力的电能的特性(例如,电流和电压)。在车辆系统制动期间,车辆控制器可以选择性地控制牵引电动机执行再生制动或动力制动。在再生制动期间,牵引电动机基于车轴和车轮的旋转生成电能。所生成的电能中的至少一些电能可以引导到电存储装置以对电存储装置进行再充电。
30.车辆控制器可以通信连接到传感器222,所述传感器监测如电源等推进组件的操作。例如,由一个或多个传感器构成的第一组传感器可以监测电存储装置的电荷状态。由一个或多个传感器构成的第二组传感器可以监测与发动机相关联的储罐中存在的燃料的量。由一个或多个传感器构成的第三组传感器可以监测与燃料电池相关联的储罐中存在的燃料的量。其它传感器可以监测:车辆系统的移动参数,如车辆系统的速度;周围环境条件,如温度和湿度;车辆系统的当前位置;等等。
31.在图1所示的控制系统的控制器安置在车辆系统外的实施例中,车外控制器可以从车辆控制器中无线地查询传感器生成的传感器数据中的至少一些传感器数据以用于规划和/或修改车辆的规划行程。例如,车辆控制器可以生成要通过通信装置传送到车外控制器的状态消息。状态消息可以包括例如电存储装置的当前电荷状态和一个或多个车载燃料储存容器中存在的燃料的当前量。在控制系统的控制器安置在车辆系统上的替代实施例
中,控制器可以与车辆控制器集成或与车辆控制器分离但通信连接。
32.图1所示的控制器可以通过对要用于推进车辆系统完成车辆系统的先前规划行程的能量和功率执行预算分析来改变先前规划行程。先前规划行程包括在规划行程的定义中。预算分析可以包括确定车辆系统完成规划行程的作为时间的函数的功率需求。预算分析还确定来自车辆系统的作为时间的函数的可用功率量是否足以推进车辆系统完成先前规划行程。这种充足确定是通过随时间推移将可用功率量与所确定的功率需求进行比较来执行的。然后,基于所述比较改变规划行程。图1所示的控制器的一个或多个处理器可以被配置为执行预算分析并基于预算分析改变规划行程。
33.所需功率与可用功率量之间的比较可以指示在行程期间的一个或多个时间段期间存在预期的功率或能量短缺,使得车辆系统无法满足按计划完成行程的功率需求。短缺可能由于硬件和设备的能力限制而发生。例如,功率需求可能要求给定时间t1时有15,000马力(hp)的功率输出来推进车辆系统。如果车辆系统的混合编组上的电源在时间t1时输出的累积可用功率限于14,000hp,则会发生短缺。短缺的另一原因是过早消耗所有可用储存能量,如在完成规划行程之前用光燃料和/或电量。例如,给定时间t2时的功率需求可能要求10,000hp的功率输出。即使10,000hp在混合编组的硬件和设备的能力范围内,但如果预计车辆系统已经耗尽所有可用储存能量(例如,燃料、电能等),则车辆系统也可能无法在时间t2时供应这种功率以进行推进。响应于确定短缺,规划行程被改变以弥补短缺,使得车辆系统在改变后的行程中行驶时不会经历短缺。可以通过改变车辆系统和/或行程参数以增加与短缺相关联的给定时间时的可用功率量和/或降低给定时间时的功率需求来改变规划行程以弥补短缺。
34.在一个或多个实施例中,预算分析可以在车辆系统开始规划行程之前执行。预算分析可以在车辆系统的规划行程期间如响应于经历意料外的事件而执行。例如,如果车辆系统在行程期间经历意料外的延迟,则可以在行程中途重新执行功率和能量预算分析以确定是否需要基于更新后的情况再次改变规划行程从而确保车辆系统的能量(例如,作为时间的函数的功率)和瞬时功率足以完成行程。
35.图3是根据实施例的绘制了车辆系统完成先前规划行程的作为时间的函数的功率需求302的曲线图300。曲线图的纵轴304表示功率,并且横轴306表示时间。功率以马力(hp)为单位示出,而时间以小时(hr)为单位示出,但是在其它实施例中,可以使用其它功率和/或时间单位。功率需求302可以由图1所示的控制器的一个或多个处理器确定。图3是用于解释和理解目的的简化曲线图,并且规划行程的作为时间的函数的所需功率的实际绘图可以具有更多变化和数据点。尽管图3中标绘了作为时间的函数的功率需求,但是在其它实施例中,功率需求可以表示为随沿路线的距离变化、随位置变化、随车辆质量或其它车辆参数变化以及随环境条件变化。此外,在另一曲线图中,纵轴可以表示驱动车辆系统所需的力的单位,而不是功率的单位。
36.功率需求302作为时间的函数是基于与规划行程有关的各种信息确定的。例如,控制器可以收集与行程约束和参数有关的行程信息、与车辆系统将在行程中行驶的一条或多条路线有关的路线信息、移动约束、车辆和负载信息等。
37.行程信息可以包括起始位置和结束位置、预定出发时间、预定到达时间、在开始行程后完成行程的指定时间段、沿一条或多条路线完成规划行程的距离等。行程约束和其它
预定信息可以存储在控制器的存储器中并且可以由一个或多个处理器访问。
38.路线信息可以标识车辆系统要在规划行程期间行驶的具体路线,如车辆系统从第一路线到第二路线然后到第三路线的移动。路线可以是街道、铁路轨道、路径、空中航道、海洋通道等。路线信息可以包括与路线有关的地理和/或地质信息,如路线的坡度、路线的曲率半径、气流、速度限制、交通模式等。沿斜坡向上推进车辆系统所需的功率的量大于沿平坦路线推进车辆系统所需的功率的量。路线信息可以标识沿行程的可以与气流减少相关联的区域,如隧道,所述区域可能限制发动机(如果车辆系统中存在发动机)的效率,从而相比更易获得新鲜气流的区域需要额外的功耗。路线信息可以包括可能影响行程的周围环境条件,如沿行程的环境温度、沿行程的环境湿度和可能影响车轮-路线附着力的任何预期降水(雨或雪)。
39.移动约束表示车辆系统由于所强加的法规、法律等而在行程期间可以如何移动的约束。移动约束可以包括速度限制、排放限制、噪音限制等。行程的不同区段可以具有不同的相关联移动约束。移动约束可以指规划由车辆系统在规划行程期间遵循的速度分布。速度分布可以指定随时间或沿行程的位置变化的不同速度值。任选地,速度分布可以包括车辆系统要基于时间或沿行程的位置实施以使作为时间的函数的车辆系统的速度与速度分布匹配的牵引设置和制动设置。速度分布的一些部分可以由于各种目标和考虑因素而不同于沿路线的指定速度限制,所述目标和考虑因素如行驶以增加燃料效率和节省燃料、减少排放和/或减少噪音。速度分布可以由控制器的一个或多个处理器和/或由如能量管理系统等其它处理电路系统生成。速度分布可以是行程规划。
40.车辆和负载信息可以包括与预定进行规划行程的车辆系统有关的一般信息以及与车辆系统要在规划行程中运输的货物或负载有关的信息。与负载有关的信息可以包括要运输的负载或货物的类型、量和/或重量。与车辆系统有关的信息可以包括车辆系统的重量和/或可以用于估计车辆系统的重量的一般车辆构造信息,如车辆系统中存在的非推进生成车辆的数量和推进生成车辆的数量。可以利用其它信息,如车辆系统的长度。车辆信息任选地可以不具体涉及混合编组的一种排列。例如,与混合编组有关的具体信息,如每种推进生成车辆的类别(或类型)和数量、可用于提供推进力的具体电源以及电源的具体状况(例如,存在的燃料的量、电荷状态等)可以用于确定与功率需求进行比较的作为时间的函数的可用功率量。
41.为了确定作为时间的函数的功率需求,可能足够的是,估计车辆系统的总重量,包括由负载或货物引起的重量,而不需要具体编组信息。例如,可以将车辆系统的总重量连同路线信息、移动约束和行程信息输入到基于物理学的模型中以确定车辆系统根据约束完成规划行程的作为时间的函数的所需功率。基于物理学的模型可以基于上文描述的各种输入信息利用与力、能量、功率和动量相关的物理学运动方程来输出作为时间的函数的功率需求。功率需求表示用于在不违反其它约束(如果可能的话),如低于公告速度限制行驶的情况下,在行程的预定的一天沿一条或多条路线推进车辆系统以在预定到达时间到达行程的指定结束位置的作为时间的函数的功率输出。参考图3,功率增加的时间段可以表明车辆系统正在加速、沿着斜坡向上行驶等。功率减小的时间段可以表明车辆系统正在降低速度(例如,减速)、沿斜坡向下行驶等。图3中的功率需求指示约14,000hp的最大瞬时功率需量,所述最大瞬时功率需量在行程开始后约5小时、约7小时、约15小时和约17.5小时发生。在行程
开始后约10.5小时到约14小时的第一时间段308以及约20小时到约23.5小时的第二时间段310期间,功率需求为负值。负功率需求指示牵引电动机可以用于再生制动以从车辆系统的移动中捕获能量的时间段。例如,可以预计车辆系统在第一再生时间段308和第二再生时间段310期间正在减速和/或下坡行驶。
42.能量和功率预算分析的下一步骤是确定来自车辆系统的作为时间的函数的可用功率量是否足以推进车辆系统完成先前规划行程。这种充足确定是通过计算规划行程期间作为时间的函数的车辆系统可以为推进(和必要辅助负载)提供的可用功率量来进行的。与功率需求不同,可用功率量考虑了与车辆系统的混合编组有关的具体细节,如可用的电源的类型、每种类型的电源的数量以及每个电源的状况。
43.在一个非限制性示例中,混合编组可以包括三个燃料消耗性车辆和一个电池驱动的车辆。三个燃料消耗性车辆中的每个燃料消耗性车辆可以包括发动机(例如,内燃机),如柴油发动机。电池驱动的车辆可以不包括发动机,而相反可以包括向牵引电动机供应电能以提供牵引力的一个或多个电存储装置。图1所示的控制器的一个或多个处理器使用与具体混合编组有关的信息来确定作为时间的函数的可用功率量。例如,与混合编组中的三个燃料消耗性车辆有关的相关信息可以包括:发动机中的每个发动机的额定功率,如发动机的额定最大功率输出;发动机消耗燃料的速率;来自发动机的能量中可以转换为牵引力的能量的百分比;和/或车辆上供发动机中燃烧的燃料的量。
44.与电池驱动的车辆有关的相关信息可以包括电能存储装置(例如,电池组)的电荷容量、作为时间的函数的电能存储装置的电荷状态(例如,存储装置中的电压)和/或电能存储装置的健康状态。健康状态是指电能存储装置的年龄和/或状况。例如,电池单元随时间推移退化,这会降低电池单元的容量、可以对电池单元进行充电和放电的速率等。电荷状态在电能存储装置供应电能以驱动牵引电动机时减小并且在电能存储装置从牵引电动机接收在再生制动期间捕获到的电能时增加。
45.在行程期间,车辆系统上的可用能量的总量通常随时间推移而减少,因为在工作中会消耗能量来推进车辆系统。确定作为时间的函数的可用功率可以考虑在行程期间增加车辆系统上的能量的机会。一个示例是通过再生制动来增加,因为可以将捕获到的能量供应到电池驱动的车辆上的电能存储装置以对能量存储装置进行再充电。增加能量的另一个示例是通过安排停车以对燃料储存罐进行燃料补给和/或对电能存储装置进行再充电。控制器可以在功率和能量预算分析期间考虑燃料补给和/或再充电机会。
46.如果混合编组中的推进生成车辆中的一个或多个推进生成车辆包括燃料电池,则控制器可以考虑车辆系统上的燃料电池的数量、用于车辆系统上的燃料电池的燃料的量、燃料电池的类型和效率和/或燃料电池的功率输出或额定功率。如果组中的车辆中的一个或多个车辆含有依靠以液体(例如,氢气、液化天然气)形式储存的气态燃料运行的发动机,则控制器可以考虑再气化单元的再气化率。
47.基于以上关于具体混合编组的信息,图1所示的控制器可以确定作为时间的函数的车辆系统可以提供以进行推进的可用功率量。给定时间时的可用功率量是瞬时功率输出。长时间段,如行程的持续时间,内的可用功率量表示可用能量的量。例如,图3中的作为时间的函数的功率曲线下的区域表示能量。
48.在一个或多个实施例中,控制器可以考虑车辆系统完成规划行程所需的能量的量
的行程中变化。一个或多个量变化可以响应于沿行程的不同点处的有效负载或影响完成行程/任务所需的能量的量的其它因素的变化而发生。在其它实施例可以考虑例如可能由交通阻塞引起的计划外的长空转时间段(自然地,完全停车可以使发动机关闭,而缓慢移动的组可能需要连续使用能量)的同时,此处设想的实施例考虑了负载和/或天气的变化。例如,如果有效负载变得较重,则可能消耗更多能量。如果例如正在下大雨并且保留的水使重量增加或者如果在沿路线的路径点处有另外的货物装车,则有效负载可能变得较重。其它因素可以包括车辆系统需要在积雪或泥泞道路上行驶以及增加摩擦力或降低能量转换成运动的效率的机械故障。另一个因素可以是风向或风速或气流方向或气流速度的转变。虽然风向和风速对陆地车辆系统的能量效率有影响(通常是深远影响),但对于航空器来说,其可能是最大的影响。类似地,对于海洋船舶,水流可以是控制器要考虑的因素。另一个因素可以是备用燃料和/或储存电能的量,其可能随着能量被消耗而在行程期间随时间推移减少。例如,燃烧燃料会随时间推移逐渐减小车辆系统上的燃料的重量,使得车辆可以在行程期间变得稍微较轻(在重量方面)。
49.在一个或多个实施例中,控制器可以预留车辆系统上的指定量的可用能量以供车辆系统在完成规划行程之后使用。预留量的可用能量被保存以供行程之后用于如沿第二随后行程推进车辆系统、在场地中推进车辆系统和/或在完成行程之后驱动非推进负载。预留量可以指定为燃料的某一量或百分比,如一个或多个车载储存罐中的燃料容量的10%,或在电能存储装置中储存的电荷容量的某一电压或百分比。因为预留量的可用能量被保存用于行程完成后执行的工作,所以预留量不被考虑为完成行程的可用能量。如此,预留量的可用能量可以从所确定的作为时间的函数的可用功率量中排除。例如,如果电能存储装置的当前电荷状态为电荷容量的50%,并且预留量的可用能量对应于电荷容量的10%,则电荷容量的仅40%(例如,50%减去10%)可以贡献于完成规划行程的作为时间的函数的可用功率量。类似地,如果混合编组的燃料消耗性车辆总共具有15,000加仑,并且满足预留量的可用能量需要4,000加仑,则仅11,000加仑(15,000减去4,000)可以贡献于完成规划行程的作为时间的函数的可用功率量。
50.图1所示的控制器可以确定来自车辆系统的可用功率量是否足以推进车辆系统完成先前规划行程。可以随时间的变化通过随时间推移将可用功率量与所确定的功率需求进行比较来进行所述确定。可以随距离的变化、随功耗率的变化或随另一模型的变化进行所述确定。如上所述,可用功率量可以由以下限制:机械设备能力,如发动机额定功率;以及能量不足,如用光可用燃料或电量。
51.根据混合编组可以包括机械联接到一个电池驱动的车辆的三个具有柴油发动机的车辆的以上非限制性示例,任选地,每个柴油发动机在给定时间的最大或额定功率输出为4,000hp。假设燃料量充足,在给定时间时来自柴油发动机的可用功率的总量为12,000hp,如图3中的线312所示。如曲线图300所示,三个柴油驱动的车辆能够根据规划行程驱动车辆系统(例如,能够满足功率需求),直到功率需求在约第4小时超过12,000hp。电池驱动的车辆的电量足以对柴油驱动的车辆进行补充并且满足第4小时的功率需求。
52.图4是根据一实施例的绘制了在车辆系统的规划行程期间作为时间的函数的在车辆系统的电能存储装置中储存的可用能量402的曲线图400。曲线图的纵轴404表示以马力小时(hp
·
hr)为单位的能量,并且横轴406表示以小时(hr)为单位的时间,但是在其它实施
例中,可以使用其它能量和/或时间单位。所示示例中的电能存储装置的容量为9,000hp
·
hr,如线408所示。可用能量402表示图1所示的控制器确定的作为时间的函数的可用功率量的一部分。图3中绘制的作为时间的函数的功率和图4中绘制的作为时间的函数的能量两者都是预测性的,而不是反应性的,使得控制器预测的是在车辆系统实际在行程中行驶之前将在行程期间需要和可用的功率和能量的量。
53.图4中的曲线图指示行程开始时(例如,时间0)电能存储装置的电荷状态为5,000hp
·
hr。在前四个小时期间,三个柴油驱动的车辆可以提供所有用于推进车辆系统的功率。在第4小时,功率需求与来自柴油驱动的车辆的可用功率量之间存在短缺,因此来自存储装置的电能供应到牵引电动机以对从柴油发动机供应的功率进行补充。电荷状态(例如,存储装置中的能量的量)通常随时间推移逐渐减少,直到电能存储装置不再用于提供用于推进和必要辅助负载的功率,这在约第7小时出现。如图4所示,电荷状态在第7小时下降到约1,000hp
·
hr并且保持恒定一段时间。在第一再生时间段308,控制器估计再生制动将向电能存储装置供应足够的捕获到的电能以将电荷状态从1,000hp
·
hr增加到8,500hp
·
hr。控制器预测在行程开始后约14.5小时,完成规划行程的功率需求再次超过来自柴油发动机的可用功率的总量(例如,12,000hp
·
hr)。如此,从14.5小时开始再次从电能存储装置汲取电能以对柴油发动机进行补充。在此第二功率供应时间段期间,电荷状态下降为约4,000hp
·
hr。在约第20小时,第二再生时间段320开始,并且捕获并供应到存储装置的再生能量将存储装置充电到9,000hp
·
hr的电荷容量。一旦电能存储装置达到饱和,过量的捕获到的能量就供应到其它电能存储装置或通过电阻元件以热的形式耗散。
54.如示例在图4中所示,电能存储装置在行程的整个持续时间内维持至少1,000hp
·
hr,甚至是在对柴油驱动发动机进行补充时也是如此。例如,永远不存在功率和能量预算的短缺,因为预期电能存储装置总是具有足以在需要满足功率需求时对柴油发动机进行补充的能量。因此,预测可以包括三个燃料消耗性(例如,柴油驱动)车辆和一个电池驱动的车辆的混合编组能够如期完成规划行程。相对于可能保守地分配至少四个柴油驱动的车辆来在规划行程中推进车辆系统而不使用任何电池驱动的车辆的常规调度方法,为车辆系统配置三个柴油驱动的车辆和一个电池驱动的车辆(其缺乏发动机)可以以较高能量效率、较低燃料消耗量、较低排放和较低噪音完成行程。例如,相比电池驱动的车辆代替的一个或多个柴油驱动的车辆,电池驱动的车辆可以具有更高的能量效率、可以更安静、可以消耗较少燃料并且可以产生较少排放。
55.图5和6被用于示出作为时间的函数的可用于推进车辆系统的功率量不足以满足所确定的功率需求的短缺。图5绘制了作为时间的函数的功率需求302的曲线图500。图5中的功率需求302与图3所示的功率需求相同,所以使用了相同的附图标记。图6绘制了在车辆系统的规划行程期间作为时间的函数的在混合编组的电能存储装置中储存的可用能量602的曲线图600。在此短缺示例中,规划行程与上文参考图3和4所描述的规划行程相同。任选地,车辆系统的混合编组的构造也与上文参考图3和4所描述的构造相同。如图6所示的一项差异在于电能存储装置的初始电荷状态为2,000hp
·
hr,而不是图4所示的5,000hp。
56.如图5和6所示,当功率需求在约第4小时超过可从柴油驱动的发动机获得的总功率时,电能存储装置向牵引电动机供应电能。电流消耗会将存储装置中的可用能量的量一直减少到第5小时的0hp
·
hr,这通过标记604指示。一旦存储装置完全耗尽,存储装置就无
法供应用于驱动推进和必要辅助负载的任何另外的电能。在图5中的标记502指示的第5小时后的时间段中的大部分时间期间,功率需求超过三个柴油发动机的总能力312,但电能存储装置无法对柴油发动机进行补充。在标记502指示的时间段期间功率需求302与可用功率312的量之间的差异表示短缺。短缺意味着根据具体排列的车辆系统的混合编组无法提供足以使车辆系统能够按计划完成行程的功率。
57.所示示例中的短缺是在假设所有车辆和车辆的推进相关组件按计划操作的情况下标识的。控制器任选地可以考虑一个或多个组件在行程期间发生故障的风险,所示故障将减少作为时间的函数的可用功率量。故障可以包括断轴、发动机损坏等。例如,控制器可以施加使所确定的可用功率减少某一量或某一百分比的校正因子以解决组件故障的风险。故障风险可能在行程期间随时间推移增加,使得相比行程的起始区段,沿结束区段的故障风险较大。
58.根据一个或多个实施例,图1所示的控制器可以基于随时间推移进行的功率需求与可用功率量之间的比较来改变规划行程。例如,如果存在短缺,如图5中的标记502处指示的短缺,则控制器可以改变规划行程以弥补(例如,消除)短缺。
59.在一个示例中,控制器可以通过指示改变车辆系统的车辆构造来改变规划行程。例如,可以通过添加至少一个(附加的)电池驱动的车辆以包括在车辆系统中来改变车辆构造以弥补短缺。至少一个电池驱动的车辆可以代替一个或多个燃料消耗性车辆。可以通过使编组中的现有电池驱动的车辆的电荷状态增加,如通过将初始电荷状态从2,000hp
·
hr增加为5,000hp
·
hr来改变车辆构造。图3和4指示等于5,000hp
·
hr的初始电荷状态将足以弥补图5所示的短缺。改变车辆构造的另一种方式是如通过增加电池单元的数量和/或尺寸来增加电池驱动的车辆的电荷容量。
60.在第二示例中,控制器可以通过改变行程的操作方面来改变规划行程。操作方面是指车辆在行程期间如何操作,如移动参数(例如,速度、加速度、减速度)、停车的数量和持续时间、具体行驶路径等。控制器可以通过修改或放松预定行程参数和/或约束,如速度限制、到达时间等来改变操作方面。任选地,控制器可以通过延迟车辆系统在规划行程中的预定到达时间来弥补缺点或以其它方式提供另外的时间以使车辆系统完成行程。延迟预定到达时间和/或增加完成行程的指定时间段将减少时间变化的功率需求随,因为有另外的时间来执行同一工作。延迟到达时间的必然结果是降低车辆系统沿路线行驶的速度,因为降低车速的结果同样是到达时间延迟。
61.控制器可以通过超过规划行程的移动约束来改变规划行程。例如,控制器可以允许车辆系统超过对车辆系统生成的排放的量和/或车辆系统产生的噪音的量的限制。超过这种限制可以增加燃料消耗性车辆可以提供的可用功率量,这可以用于满足功率需求。任选地,因为预算分析可以预测短缺的时间和/或位置,所以控制器可以允许车辆系统仅在弥补短缺所需的程度上超过移动约束。例如,在图5中,在第7小时后,控制器可以恢复移动约束,因为不存在其它预期的短缺。
62.可以改变的另一行程参数是车辆系统将在规划行程中行驶的具体路线。例如,规划行程可以包括第一组路线。控制器可以改变规划行程以包括可以足以消除短缺的不同的第二组路线。例如,相比第二组路线,第一组路线可以包括较大的上坡坡度和/或较短的曲率半径,使得沿第一组路线行驶所需的功率大于沿第二组路线行驶所需的功率,即使第二
组路线限定的完成规划行程的距离大于第一组路线限定的完成规划行程的距离也是如此。
63.在第三示例中,控制器可以通过添加停车以对车辆系统的混合编组进行燃料补给和/或再充电来改变规划行程。例如,如果在行程的前四小时内停车以对电能存储装置进行再充电,则电能存储装置可以具有足以满足过量功率需量的能量,从而消除图5中的标记502处的短缺。
64.在第四示例中,控制器可以通过改变各个电源之间的功率分配来改变规划行程。例如,因为如图6所示,电能存储装置在行程开始时相对耗尽,所以可以改变行程以使用柴油发动机中的一个或多个柴油发动机来驱动发电机,如牵引电动机,从而在行程的前几小时期间对电能存储装置进行充电。然后,当在第四小时需要储存电能时,电荷状态将足以满足过量功率需量,而不会达到耗尽状态。任选地,可以改变行程以控制至少一个电池驱动的车辆和燃料消耗性车辆基于可用功率的不同来源的财务成本随时间推移提供不同量的牵引力以推进车辆系统。例如,当多个电源可用于在给定时间段期间单独满足功率需求时,控制器可以选择表示每功率输出最低财务成本的在给定时间段期间提供推进的电源。
65.控制器任选地可以改变规划行程以包括以上示例中所描述的控制操作中的多个控制操作。在改变规划行程之后,但在车辆系统开始行程之前,控制器可以基于更新后的规划行程执行功率和能量预算分析以确定功率需求与可用功率量之间的更新后的差异。
66.例如,图3和5所示的功率需求302表示第一功率需求。如果控制器通过延迟指定到达时间和/或延长完成行程的指定时间段来改变规划行程,则控制器基于改变后的到达时间和/或改变后的行程持续时间确定车辆系统完成先前规划行程的作为时间的函数的经修改功率需求。然后,控制器通过将来自车辆系统的可用功率量与所确定的经修改功率需求进行比较来确定可用功率量是否足以推进车辆系统完成先前规划行程。如果对规划行程的改变不影响可用功率量,则控制器可以使用与之前计算的量相同的量。另一方面,如果例如电能存储装置的容量增加,则控制器可以确定作为时间的函数的修改后的可用功率量。基于功率需求和可用功率量中的一个或两个的更新后的值之间的比较,控制器可以确认并保存修改后的规划行程或可以再次改变规划行程。以此递增地改变规划行程的方式,控制器可以将注意力投向或缩小到规划行程的以下排列(例如,具体路线、车辆构造等):所述排列满足指定约束,如提供可接受的到达时间,同时具有更高能量效率、消耗较少的基于碳氢化合物的燃料、生成较少的排放和/或比未以此方式规划的其它车辆行程产生较少的噪音。
67.一旦确认并保存(例如,最终确定)规划行程,车辆系统就可以根据最终确定的规划行程在行程的预定出发或开始时间行驶。例如,车辆系统可以被配置和装配有在最终确定的规划行程中指定的具体车辆构造,并且可以根据最终确定的规划行程中概括的具体的一组移动约束沿具体的一组路线行驶。车辆系统在行程中移动期间,可能发生在规划阶段未预期的某些事件,如意料外的延迟、意料外的损坏量或组件故障等。在实施例中,控制器可以在行程期间基于车辆系统的当前情况再次执行功率和能量预算分析以控制车辆系统沿行程的随后区段行驶。
68.在行程期间,控制器可以确定车辆系统完成规划行程的某一区段的作为时间的函数的第二功率需求(例如,在行程前确定了第一功率需求)。所述区段可以是行程的剩余区段或即将到来的区段。第二功率需求可以是剩余功率需求,所述剩余功率需求是指完成行程的剩余部分所需的作为时间的函数的功率的量。控制器还可以确定来自车辆系统的作为
时间的函数的第二可用功率量(例如,在行程前确定了第一可用功率量)。然后,控制器可以随时间推移将第二功率需求与第二可用功率量进行比较来确定第二可用功率量是否不足以推进车辆系统根据第二功率需求完成规划行程的所述区段。基于检测到的短缺或不足,控制器可以改变规划行程的所述区段以弥补或消除短缺。
69.图7是根据实施例的用于改变车辆系统的规划行程和控制车辆系统在规划行程中的移动的方法的流程图700。所述方法的各个步骤可以由图1中所示出且上文参考图1到6所描述的控制器110的一个或多个处理器112执行。例如,各个步骤可以由控制器的一个或多个处理器执行以改变规划行程从而在行程期间在遵守指定约束的同时增加或实现某些目标,如增加能量效率。所述方法包括的步骤可以比图7所示的步骤多、比图7所示的步骤少和/或与图7所示的步骤不同。
70.在步骤702处,确定车辆系统完成先前规划行程的功率需求作为时间的函数。在步骤704处,确定来自车辆系统的可用功率量,作为时间的函数。在步骤706处,随时间推移将可用功率量与所确定的功率需求进行比较。在步骤708处,基于所述比较,确定可用功率量是否足以推进车辆系统完成先前规划行程。
71.如果可用功率量足够,则过程继续到步骤710。在步骤710处,以第一方式改变先前规划行程。例如,可以通过减少编组中的燃料消耗性车辆的数量来改变先前规划行程以减少过量的可用功率。在步骤710之后,在步骤711处确定是否重复所述方法。若否,则在步骤712处,保存并最终确定在步骤710处修改的规划行程。如果决定重复,则在步骤710处修改的规划行程可以返回到步骤702,并且可以重复所述方法以将注意力缩小到或投向规划行程的有益解决方案或排列。
72.返回到步骤708,如果可用功率量不足,使得在行程期间存在预期短缺,则流程继续到步骤714。在步骤714处,以与步骤710中的第一方式不同的第二方式改变先前规划行程。例如,可以通过改变行程的车辆构造或操作方面(例如,行程特性)以相对于作为时间的函数的功率需求增加作为时间的函数的可用功率量从而改变先前规划行程以消除短缺。然后,流程返回到步骤702,并且重复所述方法以努力缩小或专注于规划行程的有益解决方案或排列。
73.尽管图7未示出,但是在最终确定规划行程之后,可以控制车辆系统根据最终确定的规划执行规划行程。另外,控制器可以优先使各能量储存类型保持平衡。也就是说,控制器可以选择让更多燃料,而不是储存电量(例如,电池、超级电容器)作为行程结束时的备用能量,或反之亦然。而且,在行程期间,控制器可以选择性地在一个位置优先使用一种能量类型。这可在电池优先放电以推进车辆系统穿过隧道或者发动机优先在热环境中运行以使电池免于变得过热时发生。控制器可以为了完成行程的目标而进行这些选择,但是在所述一般约束内完成,这也是为了保护组件健康、组件寿命、减少排放、减少噪音(例如,在住宅区)和/或提高车辆系统的性能。
74.在至少一个实施例中,提供了一种方法,所述方法包括确定车辆系统沿某一路线完成规划行程的功率需求。所述方法包括通过将来自所述车辆系统的可用功率量与所确定的所述功率需求进行比较来确定所述可用功率量是否足以推进所述车辆系统完成所述规划行程。所述方法还包括基于所述可用功率量与所确定的所述功率需求之间的所述比较来改变规划行程的一个或多个操作方面以生成新规划的经修改行程。
75.任选地,改变所述规划行程在所述车辆系统在所述规划行程期间沿所述路线行驶的同时发生。任选地,确定所述可用功率量包括预留所述车辆系统上的指定量的可用能量以供所述车辆系统在完成所述规划行程之后使用。所确定的所述可用功率量可以排除所预留的所述指定量的可用能量。任选地,所述规划行程是多个规划行程中的第一规划行程,并且所预留的所述指定量的可用能量由所述车辆系统用于沿所述第一规划行程之后的第二规划行程推进所述车辆系统,在场地中推进所述车辆系统和/驱动所述车辆系统上的非推进负载。任选地,所述可用功率量是至少部分地基于预估所述车辆系统在所述规划行程期间的制动事件期间捕获的再生能量的量来确定的。
76.任选地,所述可用功率量是至少部分地基于对所述车辆系统上的一个或多个电能存储装置的电荷状态、健康状态和/或电荷容量的确定来确定的。任选地,所述可用功率量是至少部分地基于所述车辆系统上的燃料电池的数量和/或所述车辆系统上用于所述燃料电池的燃料的量来确定的。任选地,作为时间的函数的所述可用功率量是至少部分地基于所述车辆系统上用于驱动所述车辆系统的发动机的燃料的量和/或所述发动机的额定功率来确定的。任选地,改变所述规划行程包括延迟所述车辆系统在所述规划行程中的预定到达时间和/或延长完成所述规划行程的指定时间段。任选地,改变所述规划行程包括向所述规划行程添加路径点以对所述车辆系统执行燃料补给或再充电中的一项或两项。任选地,改变所述规划行程包括从所述车辆系统要行驶以完成所述规划行程的第一规划路线改变为第二不同路线。
77.任选地,改变所述规划行程包括控制所述车辆系统超过发动机的排放约束。任选地,确定所述功率需求是随时间的变化或随距离的变化进行的。任选地,所述功率需求是基于以下确定的:所述规划行程的一条或多条路线的坡度;气流方向和气流速度或风向和风速;完成所述规划行程的距离;所述车辆系统中的一个或多个车辆的类别;规划所述车辆系统在所述规划行程期间行驶的周围环境;所述车辆系统的重量;规划所述车辆系统在所述规划行程期间遵循的速度分布;和/或规划所述车辆系统在所述规划行程期间运送的负载。
78.任选地,所述功率需求是随时间的变化确定的并且至少部分地基于所述车辆系统在预定到达时间或在指定时间段内完成所述规划行程。任选地,所确定的所述功率需求是第一功率需求,并且所述方法进一步包括改变所述预定到达时间和/或所述指定时间段并且基于改变后的所述预定到达时间或改变后的所述指定时间段中的一个或多个来确定所述车辆系统完成所述规划行程的作为时间的函数的经修改功率需求。经修改功率需求不同于所述第一功率需求。所述方法还包括通过将所述可用功率量与所确定的所述经修改功率需求进行比较来确定来自所述车辆系统的作为时间的函数的所述可用功率量是否足以推进所述车辆系统完成所述规划行程并且至少部分地基于所述可用功率量与所确定的所述经修改功率需求之间的所述比较来改变所述规划行程以产生新规划的经修改行程。
79.任选地,所述功率需求是第一功率需求,并且所述可用功率量是第一可用功率量。所述方法进一步包括在所述车辆系统在新规划的修改后的行程中移动期间确定所述车辆系统完成所述新规划的修改后的行程的某一区段的第二功率需求。所述方法还包括确定来自所述车辆系统的第二可用功率量不足以根据所述第二功率需求推进车辆系统完成所述新规划的修改后的行程的所述区段并且至少部分地基于所述第二可用功率量不足以根据所述第二功率需求推进所述车辆系统完成所述新规划的修改后的行程的所述区段来改变
所述新规划的经修改行程的所述区段。
80.任选地,改变所述新规划的修改后的行程的所述区段包括改变所述车辆系统到达所述区段的结束位置的预定时间。任选地,所述规划行程是通过以下来改变的:计算沿不同的第一组路线和第二组路线完成所述规划行程所需的不同量的计算功率并且然后改变所述规划行程以包括所述第二组。相比所述第二组路线,所述第一组路线限定的完成所述规划行程的距离较短,但相比所述第二组路线,所述第一组路线限定较大上坡坡度和/或较短曲率半径。
81.在一个或多个实施例中,提供了一种控制器,所述控制器包括一个或多个处理器。所述一个或多个处理器可以确定车辆系统完成规划行程的功率需求并且通过随时间推移将来自所述车辆系统的可用功率量与所确定的所述功率需求进行比较来确定所述可用功率量是否足以推进所述车辆系统完成所述规划行程。所述一个或多个处理器可以至少部分地基于所述可用功率量与所确定的所述功率需求之间的所述比较来改变所述规划行程。
82.任选地,所述一个或多个处理器可以至少部分地基于估计所述车辆系统在所述规划行程中的制动期间捕获的或从接触网线路或第三轨道接收的再生能量的量来确定所述可用功率量。任选地,所述一个或多个处理器可以至少部分地基于所述车辆系统上的一个或多个电能存储装置的电荷状态、健康状态和/或电荷容量来确定所述可用功率量。任选地,所述一个或多个处理器可以通过添加停车以对所述车辆系统进行燃料补给或再充电中的一项或多项来改变所述规划行程。任选地,所述一个或多个处理器可以至少部分地基于以下中来确定所述功率需求:所述规划行程的一条或多条路线的坡度;完成所述规划行程的距离;所述车辆系统中的一个或多个车辆的类别;规划所述车辆系统在所述规划行程期间行驶的周围环境;所述车辆系统的重量;规划所述车辆系统在所述规划行程期间遵循的速度分布;和/或规划所述车辆系统在所述规划行程期间运送的负载。
83.在一个或多个实施例中,提供了一种系统,所述系统包括一个或多个处理器,所述一个或多个处理器可以确定车辆系统完成规划行程的功率需求。所述一个或多个处理器可以通过随时间推移将来自所述车辆系统的可用功率量与所确定的所述功率需求进行比较来确定所述可用功率量是否足以推进所述车辆系统完成所述规划行程。所述一个或多个处理器可以至少部分地基于所述可用功率量与所确定的所述功率需求之间的所述比较来改变所述规划行程。
84.任选地,在确定作为时间的函数的所述可用功率量时,所述一个或多个处理器可以预留所述车辆系统上的预定量的可用能量以供所述车辆系统在完成所述规划行程之后使用。所述一个或多个处理器可以确定所述可用功率量排除所预留的所述指定量的可用能量。任选地,所述一个或多个处理器可以至少部分地基于估计所述车辆系统在所述规划行程中的制动期间捕获的或从接触网线路或第三轨道接收的再生能量的量来确定作为时间的函数的所述可用功率量。任选地,所述一个或多个处理器可以至少部分地基于所述车辆系统上的一个或多个电能存储装置的电荷状态、健康状态和/或电荷容量来确定所述可用功率量。
85.任选地,所述一个或多个处理器可以通过添加停车以对所述车辆系统进行燃料补给和/或再充电来改变所述规划行程。任选地,所述一个或多个处理器可以通过从第一路线切换为完成所述规划行程所行驶的不同第二路线。任选地,所述一个或多个处理器可以基
于所述车辆系统上的燃料电池的数量和/或所述车辆系统上用于所述燃料电池的燃料的量来确定作为时间的函数的所述可用功率量。任选地,所述一个或多个处理器可以基于所述车辆系统上用于驱动所述车辆系统的发动机的燃料的量和/或所述发动机的额定功率来确定作为时间的函数的所述可用功率量。任选地,所述一个或多个处理器可以至少部分地基于以下中来确定所述功率需求:所述规划行程的一条或多条路线的坡度;完成所述规划行程的距离;所述车辆系统中的一个或多个车辆的类别;规划所述车辆系统在所述规划行程期间行驶的周围环境;所述车辆系统的重量;规划所述车辆系统在所述规划行程期间遵循的速度分布;和/或规划所述车辆系统在所述规划行程期间运送的负载。
86.如本文所用,术语“处理器”和“计算机”以及相关术语,例如“处理装置”、“计算装置”和“控制器”可以不仅仅限于在本领域中被称为计算机的那些集成电路,而是可以指代微控制器、微型计算机、可编程逻辑控制器(plc)、现场可编程门阵列和专用集成电路以及其它可编程电路。适当的存储器可以包括例如计算机可读介质。计算机可读介质可以是例如随机存取存储器(ram)、计算机可读非易失性介质,如闪速存储器。术语“非暂时性计算机可读介质”表示被实施用于将信息,如计算机可读指令、数据结构、程序模块和子模块或其它数据短期和长期存储在任何装置中的有形的基于计算机的装置。因此,本文描述的方法可以编码为在有形的非暂时性计算机可读介质,包括但不限于存储装置和/或存储器装置中具体化的可执行指令。此类指令在由处理器执行时使处理器执行本文中描述的方法的至少一部分。如此,所述术语可以包括有形的计算机可读介质,包括但不限于非暂时性计算机存储装置,包括但不限于易失性和非易失性介质,以及可移除和非可移除介质,如固件、物理和虚拟存储装置、cd-rom、dvd和其它数字源,如网络或互联网。
87.除非上下文另外清楚地指明,否则单数形式“一”和“该”包括复数指示物。“任选的”或“任选地”意味着随后描述的事件或情况可能发生或可能不会发生,并且意味着所述描述可以包括事件发生的情况以及事件不会发生的情况。如在本文中贯穿说明书和权利要求书所使用的近似语言可以用于修饰可以允许变化,而不会导致其可能涉及的基本功能的改变的任何定量表示。因此,由一个或多个术语,如“约”、“基本上”和“大约”修饰的值可以不限于所指定的精确值。在至少一些情况下,近似语言可对应于用于测量所述值的仪器的精度。此处且贯穿说明书和权利要求书,范围限制可以组合和/或互换,此类范围可以标识并且包括其中含有的所有子范围,除非上下文或语言另外指示。
88.本书面说明书使用示例来公开各实施例,包括最佳模式,并且使用示例来使本领域的普通技术人员能够实践各实施例,包括制作和使用任何装置或系统以及执行任何所结合方法。权利要求书限定了本公开的可取得专利权的范围并且包括本领域的普通技术人员想到的其它示例。如果此类其它示例具有并非不同于权利要求书的字面语言的结构要素,或如果此类其它示例包括与权利要求书的字面语言无实质差异的等效结构要素,则此类其它示例旨在处于权利要求书的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1