用于电动化动力传动系统的前馈扭矩极限的制作方法
1.本说明书总体上涉及用于确定前馈扭矩极限用于减轻特别是电动车辆或混合动力电动车辆中的动力传动系统振荡的方法和系统。
背景技术:
2.诸如以纯电动模式操作的混合动力电动车辆或电动车辆(后者在本文中也称为纯电动车辆)等车辆可以包括能够供应足够多动力来推进车辆的电动化动力传动系统。具体地,电动化动力传动系统可以包括被配置为向电动马达供电的可再充电电池或电池组。电动马达进而可以(例如,经由驱动轴)向车辆的一个或多个驱动轮供应车轮扭矩,由此推进车辆。因为在用于唯一的发电和输送的电动化动力传动系统的操作期间不采用发动机,所以供应给一个或多个驱动轮的车轮扭矩可能受到电动马达和可再充电电池的工况的限制。
3.通常,车轮扭矩可以被认为是所供应的动力与车辆速度的比率。因此,当车辆速度低(例如,诸如在车辆起动期间接近零)时,即使具有相对较小的动力输入,也可以获得大量的车轮扭矩。随着车辆速度的增加,可再充电电池可能无法进行调节以维持基本上连续的高放电功率同时履行对大量车轮扭矩的请求,特别是当可再充电电池的荷电状态(soc)和/或温度相对较低时。因此,当车辆开始运动时,可以在可再充电电池处命令放电功率节流,从而导致显著的动力传动系统振荡(例如,可被车辆的操作员注意到)。
4.先前限制车轮扭矩的尝试包括抗扰动控制策略。示例性方法由sakakiyama在美国专利号6,604,595和scelers等人在美国专利号7,363,138中以及yoshimura等人在“用于具有轮内马达的电动车辆的驱动扭矩控制方法(driving torque control method for electric vehicle with in-wheel motors)”(electr.eng.日本,2012,181,49-58)示出。sakakiyama、scelers等人和yoshimura等人各自教导响应于车辆起动之后的牵引力损失(例如,车轮滑移)而减小或重新分配车轮扭矩。减轻动力传动系统振荡的其他尝试包括减小再生制动扭矩,如treharne等人(美国专利号8,712,616)中,或者调整多个动力源之间的扭矩分配(例如,在动力分配配置中),如syed等人(美国专利号7,860,567)中。
5.然而,本文的发明人已经认识到,此类尝试无法在电动化(例如,非混合动力)动力传动系统的起动期间管理动力传动系统振荡。例如,在不存在可串联或并联执行的多个动力路径或输出的情况下,包括重新分配车轮扭矩的解决方案的适用性有限。此外,通过等待在车辆操作期间(例如,起动后)发生的扰动,可以考虑归因于不利的起动状况(例如,低电池soc、低电池温度等)的动力传动系统振荡。
技术实现要素:
6.在一个示例中,可以通过一种用于在起动期间操作车辆的方法来解决上述问题,所述方法包括:响应于所述车辆的电池组当前可用的放电功率小于或等于阈值放电功率以及进一步响应于当前车辆速度小于或等于阈值车辆速度,在请求车轮扭矩处于前馈扭矩极限时操作所述车辆,所述前馈扭矩极限是基于所述阈值车辆速度和所述电池组当前可用的
所述放电功率。通过这种方式,可以实施前馈控制策略以在车辆起动时限制车轮扭矩,使得可以减轻由扭矩输送的急剧变化引起的动力传动系统振荡。
7.作为一个示例,在车辆起动期间,可以以车辆的最大扭矩能力和可动态可调整的前馈扭矩极限中的最小值来请求车轮扭矩,以便不会淹没车辆的电动化动力传动系统。最大扭矩能力可以是特定于给定车辆和电池配置的设定值。前馈扭矩极限可以取决于车辆的电池在可校准的最小车辆速度下的瞬时放电功率极限,使得所供应的车轮扭矩的量可以受到瞬时放电功率极限的有效限制。另外或替代地,因为电池的soc可以是电池的放电功率的函数,并且反之亦然,所以可以基于soc是否大于阈值soc来认为所供应的车轮扭矩量受限,所述阈值soc基于根据电池温度调整的预设阈值放电功率来确定(例如,对于低于电池的峰值性能范围的温度,可以增加阈值soc)。无论选择最大扭矩能力还是前馈扭矩极限来限制所请求的车轮扭矩,车轮扭矩都可以在整个车辆操作中继续受到动态限制(例如,即使在起动后,而不管车辆速度如何)。通过这种方式,可以在选择的车辆工况期间动态地减小所请求的车轮扭矩,使得电池不会超过其瞬时放电功率极限,由此通过减少车辆的动力传动系统处的噪声、振动和粗糙性来改善操控性。
8.应当理解,提供以上发明内容是为了以简化的形式介绍在具体实施方式中进一步描述的一系列概念。它并不意味着确定所要求保护的主题的关键或必要特征,主题的范围由具体实施方式之后的权利要求唯一地限定。此外,所要求保护的主题不限于解决上文或本公开的任何部分中提及的任何缺点的实现方式。
附图说明
9.图1示出了被配置有电动化动力传动系统的车辆的示例性实施例的示意图。
10.图2示出了车辆控制器的高级输入-输出图,所述车辆控制器可操作以在车辆起动期间经由前馈控制环路来限制扭矩。
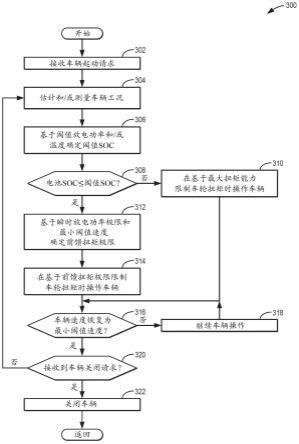
11.图3示出了用于减轻电动化动力传动系统(诸如图1的电动化动力传动系统)中的振荡的方法的流程图。
12.图4示出了用于根据电池温度和电池放电功率确定阈值荷电状态(soc)的映射图。
13.图5示出了用于根据瞬时放电功率极限和最小阈值车辆速度来确定前馈扭矩极限的映射图。
14.图6示出了当车辆起动时电池soc小于阈值soc时基于车辆电池可输送的最大扭矩来限制车轮扭矩的预示性示例。
15.图7示出了当车辆起动时电池soc小于阈值soc时基于前馈控制环路来限制车轮扭矩的预示性示例。
具体实施方式
16.以下描述涉及用于确定车辆起动时的前馈扭矩极限以减轻电动化动力传动系统(诸如包括在图1的车辆系统中的电动化动力传动系统)的振荡的方法和系统。可以在包括在车辆系统中的控制器处实施用于确定前馈扭矩极限并利用前馈扭矩极限限制所请求的车轮扭矩的前馈控制程序,所述控制器被配置为处理一个或多个输入以生成一个或多个输出,如图2所示。例如,控制程序可以包括图3中描绘为用于动态地减轻电动化动力传动系统
的振荡的方法。其中,所述控制程序可以包括将前馈扭矩极限确定为每当车辆系统的电池的荷电状态(soc)小于阈值soc并且车辆系统的车辆速度小于或等于最小阈值车辆速度时瞬时放电功率极限与最小阈值车辆速度的比率。在一些示例中,控制程序可以包括基于电池的阈值放电功率和温度中的每一者(诸如通过使用在图4中描绘的映射图)来查找阈值soc。在一些示例中,控制程序可以包括基于瞬时放电功率极限和最小阈值车辆速度中的每一者(诸如通过使用图5中描绘的映射图)来查找前馈扭矩极限。图6和图7各自描绘了车辆系统的操作的预示性示例,其中电池处于低soc并且车轮扭矩基于车辆系统的最大扭矩能力(在图6中)或前馈扭矩极限(在图7中)进行限制。
17.现在参考图1,示意性地描绘了包括电动化动力传动系统105的示例性车辆系统100的各方面。在所示示例中,电动化动力传动系统105可以包括电机52,所述电机可以是马达或马达/发电机。在一些示例中,车辆系统100可以是混合动力车辆系统,所述混合动力车辆系统还包括发动机系统101,所述发动机系统的发动机10联接到车辆102并且在混合动力传动系统配置中与电动化动力传动系统105包括在一起。因此,在此类示例中,车辆102可以为具有对一个或多个(驱动)车轮47可用的多个扭矩源的混合动力电动车辆。当一个或多个离合器53接合时,发动机10和电机52可以经由变速器48连接到车轮47。在所描绘的示例中,第一离合器53a布置在发动机10与电机52之间,并且第二离合器53b布置在电机52与变速器48之间。控制器12可以向每个相应离合器53a、53b的致动器发送信号,以接合或脱离相应离合器,从而将发动机10与电机52和与其连接的部件连接或断开,和/或将电机52与变速器48和与其连接的部件连接或断开。例如,当离合器53a、53b接合时,来自发动机10的扭矩可以经由曲轴40、变速器48和动力传动系统轴84传递到车轮47。变速器48可以是齿轮箱、行星齿轮系统或另一种类型的变速器。变速器48可以是定比变速器,所述定比变速器包括多个齿轮比以允许发动机10以与车轮47不同的转速旋转。通过改变第一离合器53a的扭矩传递能力(例如,离合器滑移量),可以调制经由动力传动系统轴84中继到车轮47的发动机扭矩量。
18.电动化动力传动系统105可以通过各种方式配置,这些方式包括作为并联、串联或串并联式混合动力车辆中的混合动力传动系统的一部分。在一个这样的实施例中,电机52可以是联接在发动机10与变速器48之间的混合动力传动系统中的混合动力电动车辆马达。在其他示例中,电机52可以是曲轴集成式起动机/发电机(cisg)。cisg可以联接到发动机10的输出轴,使得在车辆系统100的起动期间,cisg可以提供扭矩来转动发动机10,由此促进发动机10的起动。在一些情况下,cisg可以供应扭矩输出,以补充或替代发动机扭矩。此外,cisg可以供应负扭矩输出(即,吸收传动系扭矩),所述负扭矩输出可以被转换为电能,诸如用于对系统电能存储装置45或系统电池45充电。应当理解,尽管系统电能存储装置45在本文中被描绘为可再充电电池或电池组,但是在其他示例中,系统电能存储装置45可以是电容器。
19.在纯电动车辆实施例(例如,没有发动机系统101)中,电动化动力传动系统105可以包括系统电池45(例如,牵引电池),其将电力输送到电机52以向车轮47提供扭矩。在一些实施例中,电机52还可以充当发电机以例如在制动操作期间提供电力以对系统电池45充电。在其他实施例中,电机52可以在车辆冷起动期间作为发电机操作(如本文所使用的,车辆冷起动可以包括当车辆系统100已经从先前的操作基本上冷却时的车辆起动和/或在冷环境状况期间的车辆起动)。在此类事件期间,被包括在排放控制装置170(下面进一步详细
描述)中的一个或多个排气后处理部件可能尚未被充分加热到实现起燃。为了加速这种起燃,可以增加进气质量空气流量,这可以对应地增加发动机负荷并由此升高排气温度。增加的发动机负荷可以被机械地传递到电机52以对作为发电机的电机52提供动力。然后可以使用由电机52产生的所得电气负荷或电流来对系统电池45充电。
20.在某些情况下,系统电池45可能具有相对较低soc。此外,在寒冷的环境状况下(例如,在车辆冷起动时),系统电池45可能无法以峰值性能操作。在此类状况下,系统电池45的放电功率可能被限制为相对较低的值。在随后例如自主地或从车辆系统100的操作员接收到车辆起动请求时,动力传动系统性能可以基于低放电功率而受到限制(例如,基于低soc和冷环境状况而受到限制)。
21.具体地,在车辆起动期间,无论系统电池45能够供应给电机52的功率量如何,最初都可以在接近零的车辆速度下获得高车轮扭矩(车轮扭矩被定义为在车辆运动期间所供应的功率与车辆速度的比率,使得车轮扭矩随着车辆速度朝向零减小和/或所供应的功率增加而增加,而车轮扭矩随着车辆速度增加和/或所供应的功率减小而减小)。然而,可用车轮扭矩可能会随着车辆速度增加而迅速下降(例如,当低放电功率可用时),从而导致电动化动力传动系统105的物理振荡,由此增加噪声、振动和粗糙性(nvh)问题。
22.在本文所述的实施例中,可以通过在车辆操作的整个持续时间内(例如,从车辆起动到车辆关闭)动态地限制车轮扭矩来减轻车轮扭矩的此类急剧变化。具体地并且如下文讨论的,对于相对较低的车辆速度的预定范围(例如,其中大的车轮扭矩变化可能被证明是最成问题的),所请求的车轮扭矩可以维持在设定范围的上限处可用的车轮扭矩(无论起动时实际可用的车轮扭矩如何)。当车辆速度超过设定范围的上限时,车轮扭矩才可以开始随着车辆速度的增加而下降。通过这种方式,可以避免车轮扭矩的相对显著偏移,由此减轻电动化动力传动系统105的振荡。
23.在附加的或替代实施例中,系统电池45可以基于发动机10的一个或多个电气系统(诸如一个或多个辅助系统,包括暖通空调(hvac)系统、车灯、车载娱乐系统和其他辅助系统)的对应的电气需求来对它们供电。在一个示例中,在系统电池45上汲取的电流可以基于操作员驾驶室冷却需求、电池充电要求、其他辅助车辆系统需求和马达扭矩中的一者或多者而不断改变。
24.一个或多个传感器可以联接到系统电池45。一个或多个传感器可以被配置为生成指示系统电池45的一个或多个工况的反馈。例如,电池温度传感器49可以联接到系统电池45以估计电池温度。作为另一个示例,电压表50可以联接到系统电池45以估计系统电池45两端的电位差。作为又另一示例,电流表51可以联接到系统电池45以估计电池电流。在一个示例中,可以基于所接收的反馈来估计系统电池45的soc和/或瞬时放电功率极限。例如,可以基于电池电流的积分(例如,基于来自电流表51的反馈,并且在一些示例中,通过确定的开路电压进行校正)来确定系统电池45的soc,并且可以根据soc和电池温度、并且在一些示例中根据瞬时电池单元电压(例如,基于从电压表50接收的反馈)来确定瞬时放电功率极限。尽管本文描述的一些实施例可以包括电池温度传感器49、电压表50和电流表51中的每一者,但是其他实施例可以包括更少的传感器或没有传感器联接到系统电池45。在此类其他实施例中,可以间接地确定系统电池45的一个或多个工况中的至少一者。例如,可以基于周围环境的环境温度[例如,如基于由外部温度传感器(未示出)生成的反馈所估计的]和系
统电池45相对于周围环境的位置来推断(例如,外推)电池温度。作为另一个示例,可以通过向存储在控制器12的非暂时性存储器中的一个或多个查找表、函数或映射图提供输入来确定一个或多个工况。
[0025]
在一些实施例中,系统电池45可以联接到电池加热器46。电池加热器46可以(例如,在车辆起动之前)至少部分地经由外部电源供电。因此,电池温度可以经由电池加热器46的操作相对于周围环境的环境温度升高。另外或替代地,系统电池45可以被设置有绝缘套筒以将热量(例如,来自前一车辆操作或来自先前较热的环境温度)保持在系统电池45处。
[0026]
在所描绘的实施例中,发动机10是被配置有涡轮增压器15的增压发动机。涡轮增压器15可以包括压缩机114,所述压缩机经由涡轮增压器轴19机械地联接到涡轮116并由所述涡轮驱动,涡轮116继而由膨胀的发动机排气驱动。在一个实施例中,涡轮增压器15可以是双涡流装置。在另一个实施例中,涡轮增压器15可以是可变几何涡轮增压器(vgt)或可变喷嘴涡轮(vnt),其中涡轮几何形状可以根据发动机工况而主动地变化。
[0027]
由排气驱动的涡轮116的旋转可以迫使压缩机114旋转。新鲜空气可以沿着进气通道42经由气箱112引入发动机10中并且可以从发动机流到压缩机114。在选择状况期间,通过调整压缩机再循环阀(crv)62的开度,由涡轮增压器15压缩的空气也可以通过压缩机再循环通道60从压缩机114的出口再循环到入口。crv 62可以是连续可变阀或者可能是可变离散阀,并且增大crv 62的开度可以包括致动(或激励)crv 62的螺线管(如果离散的话)或者诸如h桥的马达控制器(如果连续的话)。在一些实施例中,crv 62可以在增压发动机操作期间部分打开以提供喘振裕度。在本文中,部分打开位置可以是默认阀位置。然后,响应于喘振的指示,可以增加crv 62的开度。例如,crv 62可以从默认的部分打开位置朝向全开位置调整,其中打开程度基于喘振的指示(例如,压缩机比、压缩机流率、压缩机两端的压力差等)。在替代示例中,crv 62可以在增压发动机操作(例如,峰值性能状况)期间保持闭合以减少增压响应时间并提高峰值性能。
[0028]
压缩机114可以通过增压空气冷却器(cac)18(在本文中也称为中间冷却器18)联接到节流阀20(在本文中也被称为进气节气门20)。由压缩机114压缩的空气可以通过cac 18和节流阀20按顺序流到进气歧管22。例如,cac 18可以是空气-空气热交换器或水-空气热交换器。因此,通过cac 18的空气可以被冷却,并且空气的密度可以在流到进气歧管22之前增加。可以使用歧管绝对压力(map)传感器124来确定进气歧管压力(例如,进气歧管22内的空气充气的压力)。
[0029]
进气歧管22可以通过一系列进气门(未示出)联接到一系列燃烧室30。燃烧室30可以进一步经由一系列排气门(未示出)联接到排气歧管36。在所描绘的实施例中,示出了单个排气歧管36。然而,在其他实施例中,排气歧管36可以包括多个排气歧管区段或组。具有多个排气歧管区段的配置可以使得来自不同燃烧室30的流出物能够被引导至发动机系统101中的不同位置。同样地,其中进气歧管22包括多个进气歧管区段的配置可以使得源于不同位置的空气能够被引导至发动机系统101的不同燃烧室30(通常是气缸组)。此外,进气歧管22可以具有多个进气节气门20(诸如每组一个)。
[0030]
在一个实施例中,排气门和进气门中的每一者都可以是电子致动或控制的(例如,经由控制系统14)。在另一个实施例中,排气门和进气门中的每一者可以是凸轮致动或控制
的。无论是电子致动还是凸轮致动,都可以调整排气门和进气门打开和闭合的正时,以便实现期望的燃烧和排放控制性能。例如,可以经由可变凸轮正时系统来调整凸轮正时,以将进气凸轮和排气凸轮移动到针对给定工况提供最佳容积效率的位置。
[0031]
在一些实施例中,发动机10还可以被配置用于选择性的气缸停用,其中可以经由单独的气缸气门机构(包括进气门和排气门凸轮)来选择性地停用单独气缸气门操作,并且可以经由可停用的燃料喷射器来选择性地停用单独气缸燃料加注。
[0032]
燃烧室30可以被供应一种或多种燃料,诸如汽油、醇燃料共混物、柴油、生物柴油、压缩天然气等。可以经由直接喷射、进气道喷射、节气门阀体喷射或者它们的任何组合来将燃料供应到燃烧室30。在所描绘的示例中,燃料经由燃料喷射器66的直接喷射被提供到每个燃烧室30(尽管图1中仅示出了一个燃料喷射器,每个燃烧室30可以包括与其联接的燃料喷射器)。在其他示例中,燃料喷射器66可以联接到进气门上游的进气道,以经由进气道喷射提供燃料。更进一步地,燃料可以经由包括多个直接喷射器、多个进气道喷射器或其组合的多个燃料喷射器提供到给定的燃烧室30。燃料可通过包括燃料箱、燃料泵和燃料轨的燃料系统(未示出)输送到燃料喷射器66。在燃烧室30中,可以经由火花点火和/或压缩点火来引发燃烧。
[0033]
如图1所示,来自排气歧管36的排气可以被引导至涡轮116以驱动涡轮116。当期望减小的涡轮扭矩时,一部分排气可被替代地引导通过涡轮旁路90(例如,废气门),从而绕过涡轮116。涡轮旁路致动器92(例如,涡轮旁路阀)可以被致动打开,以经由涡轮旁路90将至少一些排气压力从涡轮116的上游释放到涡轮116下游的位置。通过降低涡轮116上游的排气压力,可以降低涡轮转速。当需要增加的增压压力时,可以通过使涡轮116加速来使压缩机114加速。其中,可以通过将排气的较大部分引导通过涡轮116而不是通过涡轮旁路90来提供更多的涡轮扭矩。涡轮旁路致动器92可以被致动闭合以增大涡轮116上游的排气压力。通过增大涡轮116上游的排气压力,可以增大涡轮转速。
[0034]
来自涡轮116和涡轮旁路90的组合流可以流过排放控制装置170。通常,排放控制装置170可以包括一个或多个排气后处理部件,所述排气后处理部件被配置为减少排气流中的一种或多种物质的量。例如,一个排气后处理部件可以被配置为当排气流较稀时从排气流中捕集氮氧化物(no
x
),并且当排气流较富时还原所捕集的no
x
。在其他示例中,排气后处理部件可以被配置为使no
x
歧化或者借助于还原剂选择性地还原no
x
。在另外的其他示例中,排放控制装置170包括三元催化剂,所述三元催化剂被配置为当还原排气流的no
x
时氧化残余碳氢化合物和一氧化碳。具有任何这种功能的不同的排气后处理催化剂可以单独或一起布置在涂层中或排放控制装置170中的其他地方。在一些实施例中,排放控制装置170还可以包括可再生碳烟过滤器,所述可再生碳烟过滤器被配置为捕集和氧化排气流中的碳烟微粒。
[0035]
来自排放控制装置170的处理后的排气的全部或一部分可以经由排气管道35(在本文中也被称为排气尾管35)释放到大气中。然而,取决于工况,一些排气可以替代地经由包括排气再循环(egr)冷却器和egr阀的egr通道(未示出)而转向到进气通道42。排气可以再循环到压缩机114的入口。排气可以标称地再循环到进气歧管22,其中只有在进气歧管压力小于排气歧管压力时才启用egr流动。在高负荷状况下,诸如当发动机10进行增压操作并在较高的歧管压力下时,egr流动可能被禁用。因而,在高负荷状况下egr流动可能效率不
高。
[0036]
一个或多个传感器可以联接到压缩机114的入口。例如,温度传感器55可以联接到压缩机114的入口以估计压缩机入口温度。作为另一个示例,压力传感器56可以联接到压缩机114的入口以估计进入压缩机114的空气的压力。另外的其他传感器(未示出)可以包括例如空燃比传感器、湿度传感器等。在其他示例中,可以基于发动机工况来推断一个或多个压缩机入口状况(诸如湿度、温度等)。传感器可以估计在压缩机入口处从进气通道42接收的进气以及从cac 18的上游再循环的空气充气的状况。一个或多个传感器还可以联接到压缩机114上游的进气通道42以确定进入压缩机114的空气充气的成分和状况。这些传感器可以包括例如大气压力传感器58。另外,节气门入口压力(tip)传感器59可以联接在cac 18的下游和节流阀20的上游以估计或测量被输送到发动机10的增压压力。
[0037]
在操作员松加速器踏板事件期间,当从有增压的发动机操作进入无增压(或增压降低)的发动机操作时,可能会出现压缩机喘振。这可能是由于当节流阀20在松加速器踏板的情况下闭合时通过压缩机114的向前流量降低而造成的。通过压缩机114的向前流量的减少可能会引起喘振并降低涡轮增压器性能。另外,喘振可能导致nvh问题,诸如来自发动机进气系统的不期望的噪声。为了能够在车辆操作的默认模式期间响应于松加速器踏板而快速降低扭矩需求且不引起压缩机喘振,由压缩机114压缩的空气充气的至少一部分可以再循环到压缩机入口。这可以提高压缩机流速以使操作移动远离喘振区域。具体地,crv 62可以被打开以将(温暖的)压缩空气从压缩机114的出口、cac 18下游再循环到压缩机114的入口。在一些实施例中,压缩机再循环系统可以另外或替代地包括再循环通道以将冷却的压缩空气从cac 18的下游再循环到压缩机114的入口。另外,涡轮旁路致动器92可以移动到更加打开(例如,完全打开)的位置,使得更多的排气流在绕过涡轮116的同时行进到排气尾管35,由此加快涡轮自旋减慢。此外,涡轮增压器15可以通过从电动马达108接收负扭矩来得到电动辅助。其中,电动马达108可以从将涡轮116连接到压缩机114的涡轮增压器轴19移除扭矩,同时对系统电池45充电。
[0038]
控制器12可以被包括在控制系统14中。控制器12被示为从多个传感器16(其各种示例在本文描述)接收信息并将控制信号发送到多个致动器81(其各种示例在本文描述)。作为一个示例,传感器16可以包括位于涡轮116上游的排气传感器126(其可以是温度或压力传感器)、map传感器124、位于涡轮116下游的排气温度传感器128、位于涡轮116下游的排气压力传感器129、压缩机入口温度传感器55、压缩机入口压力传感器56、质量空气流量(maf)传感器57、大气压力传感器58、tip传感器59、电池温度传感器49、电压表50和电流表51。在本公开的范围内,诸如附加的压力传感器、温度传感器、空燃比传感器和成分传感器的其他传感器可以联接到车辆系统100中的各个位置。致动器81可以包括例如电机52、节流阀20、crv 62、电动马达108、涡轮旁路致动器92和燃料喷射器66。控制器12可以从各种传感器接收输入数据,处理输入数据,并且采用各种致动器来基于接收到的信号和存储在控制器12的非暂时性存储器上的指令来调整发动机操作。控制器可以响应于经处理的输入数据、基于与一个或多个程序(诸如本文参考图3描述的示例性控制程序)相对应的指令或编程在所述指令中的代码来采用致动器81。作为示例,并且在下文参考图2进行描述,控制器12可以将多个输入(例如,车辆工况)传递通过逻辑子系统以输出由图3的示例性控制程序使用的参数(例如,扭矩命令和极限)。示例性控制程序还可以包括指示控制器12采用致动
器81来控制电机52以向车轮47提供车轮扭矩,其中可以根据接收系统电池45的瞬时放电功率极限和最小阈值车辆速度作为输入的前馈控制环路来限制所提供的车轮扭矩。具体地,可以命令电机52在车辆操作的持续时间内提供小于前馈扭矩极限的车轮扭矩,所述前馈扭矩极限对应于最小阈值车辆速度下的可用车轮扭矩(最小阈值车辆速度下的可用车轮扭矩继而受瞬时放电功率极限限制)。通过这种方式,可以消除否则可能在最小阈值车辆速度之前发生的车轮扭矩的大尖峰,由此减少源自此类尖峰的nvh问题。
[0039]
现在参考图2,描绘了用于车辆控制器(诸如图1的控制器12)的逻辑子系统的输入-输出方案的高级图200。参考高级图200描述的另外的部件可以是图1的车辆系统100的对应部件的实施例。在一个实施例中,车辆控制器可以经由一个或多个控制程序操作以在车辆起动时限制命令的车轮扭矩。因而,车辆控制器可以将控制逻辑202实施为逻辑子系统的非暂时性存储器中的机器可读指令,控制逻辑202可执行以生成车轮扭矩命令并限制所述车轮扭矩。
[0040]
在更高级下,控制逻辑202可以操作以接收并处理一个或多个输入204并且根据(经处理的)输入204产生一个或多个输出206。具体地,输入204可以包括用于确定车辆操作(例如,在车辆冷起动时)的当前状态的一个或多个车辆工况。在一些示例中,输入204可以包括响应于操作员需求(例如,踩下加速踏板)而生成的一个或多个扭矩请求。在一些示例中(例如,在混合动力传动系统配置中),除了发动机扭矩之外,一个或多个扭矩请求还可以包括对马达扭矩和车轮扭矩的请求。
[0041]
在确定所输送的实际扭矩时,可以提供另外的输入204,所述另外的输入可以由控制逻辑202使用来调整和限制所请求的扭矩。例如,输入204可以包括车辆电池(例如,图1的系统电池45)的瞬时放电功率极限。控制逻辑202可以使用瞬时放电功率极限来根据车辆速度选择车轮扭矩的曲线(例如,作为三维空间的轮廓)。输入204还可以包括(可校准的)最小阈值车辆速度。具体地并且如下面详细讨论的,控制逻辑202可以使用最小阈值车辆速度来确定沿着选定曲线的前馈扭矩极限。
[0042]
可以限制可用扭矩的其他车辆状况可以包括在输入204中,所述其他车辆状况诸如辅助负荷(例如,车辆车厢加热和冷却、车厢照明、驾驶员辅助系统等)、马达损耗和/或周围环境的一个或多个环境状况。辅助负荷可以将可经由电动化动力传动系统输送的至少一些功率转移离开车辆推进,而一个或多个环境状况可以限制电动化动力传动系统的一个或多个部件(诸如电池)的工况。马达损耗可能特定于电动化动力传动系统的马达的配置,并且可能导致马达效率低于理论最大效率。在一些示例中,一个或多个环境状况可以包括周围环境的压力、湿度和温度中的一者或多者和/或车辆正在操作的海拔。在一个示例中,输入204可以另外包括电池的温度,所述电池的温度取决于一个或多个环境状况和车辆中的电池的相对位置(例如,电池可以位于车辆的外表面附近,由此电池的温度可能更大程度地受一个或多个环境状况影响,或者诸如绝缘套筒等一个或多个部件可以插置在电池与周围环境之间,使得电池可能更低程度地受一个或多个环境状况影响)。电池还可以联接到电池加热器(例如,图1的电池加热器46),所述电池加热器可以向电池提供相对于周围环境中可用的热量的附加热量。
[0043]
输入204一旦被控制逻辑202接收就可以在那里进行处理以生成输出206,所述输出中的每一者可以是至少一个输入204的函数。例如,输出206可以包括基于根据一个或多
个车辆工况调整和限制的(操作员提供的)扭矩请求的扭矩命令。因而,在某些情况下,可以命令比所请求的扭矩更少的扭矩(例如,马达扭矩、车轮扭矩、发动机扭矩等)。
[0044]
例如,当电池具有相对较低的温度和/或相对较低的soc时(在一些示例中,电池的soc由控制逻辑202基于瞬时放电功率极限和电池温度中的每一者确定,或者在其他示例中被接收作为附加输入204),瞬时放电功率极限也可以相对较低,并且与其相对应的车轮扭矩的曲线可以指示相应地较低的可用车轮扭矩。此外,由于车轮扭矩的曲线可能与车辆速度成反比关系,因此相对于较高的瞬时放电功率极限,在相对较低的瞬时放电功率极限下,可用车轮扭矩可以在给定的车辆速度下以更快速率下降。为了避免由这种快速下降引起的尖峰,控制逻辑202可以使用瞬时放电功率极限与最小阈值车辆速度的组合来确定用于相对于基于瞬时放电功率极限选择的曲线限制车轮扭矩的前馈扭矩极限。具体地,前馈扭矩极限可以被定义为瞬时放电功率极限与最小阈值车辆速度的比率。因此,前馈扭矩极限可以是沿着基于瞬时放电功率极限选择的车轮扭矩的曲线的点。由于车轮扭矩的曲线与车辆速度成反比关系,因此沿着曲线的车轮扭矩值可能仅在车辆速度小于最小阈值车辆速度时高于前馈扭矩极限。因此,在其中在车辆操作的持续时间内命令的车轮扭矩被限制为前馈扭矩极限的示例中,可以命令车轮扭矩处于前馈扭矩极限,直到车辆速度达到最小阈值车辆速度,之后车轮扭矩可以随着车辆速度增加而根据曲线下降到小于前馈扭矩极限。通过这种方式,可以命令车轮扭矩小于所请求的车轮扭矩至少直到最小阈值车辆速度,使得可以减轻归因于在相对较低的车辆速度下所输送的车轮扭矩的量值的急剧变化而发生的电动化动力传动系统的振荡。
[0045]
现在参考图3,示出了用于限制可由电动马达输送的车轮扭矩由此减轻包括电动马达的电动化动力传动系统的振荡的示例性程序300的流程图。在一些示例中,电动化动力传动系统(诸如上文参考图1详细描述的车辆系统100中的电动化动力传动系统105)可以包括在被配置用于纯电动起动的车辆系统中。因而,在一些示例中,车辆系统可以是包括发动机系统(例如,发动机系统101)的混合动力电动车辆系统,所述混合动力电动车辆系统被配置为在一些场景中以纯电动模式操作并且在其他场景中以混合或内燃发动机模式操作。在其他示例中,车辆系统可以是纯电动车辆系统,并且其中可以不包括发动机系统。在任一情况下,车辆系统可以联接到可操作以执行程序300的车辆控制器,诸如控制器12。
[0046]
例如,在车辆系统(例如,100)起动时,车辆控制器(例如,12)可以可操作以基于电池的电池soc和可校准的最小阈值车辆速度限制电池(例如,45)的电池放电功率和从电机(例如,52)输送到一个或多个驱动轮(例如,47)的车轮扭矩中的每一者。具体地,可以根据电池的前馈扭矩极限或最大扭矩能力将电池soc与阈值soc进行比较,以确定是否限制车轮扭矩。阈值soc可以是电池的电池温度和与在请求车轮扭矩在最小阈值车辆速度下处于车辆系统的最大扭矩能力时由车辆系统消耗的电池放电功率相对应的预设阈值放电功率中的每一者的函数,使得可以在车辆起动场景期间选择前馈扭矩极限,在所述车辆起动场景中,电池太冷和/或充电不足,以避免在车辆速度小于最小阈值车辆速度时所输送的车轮扭矩存在大尖峰[大尖峰如果不调整则可能导致电动化动力传动系统(例如,105)发生振荡]。因此,在此类场景中,可以在车辆速度小于最小阈值车辆速度时命令车轮扭矩处于前馈扭矩极限,同时仍然允许车轮扭矩在较高车辆速度下减小(例如,其中可以命令车轮扭矩小于前馈扭矩极限)。在一些示例中,可以随着车辆系统的一个或多个车辆工况改变(例如,随着
电池温度升高)而进一步调整前馈扭矩极限。通过这种方式,可以通过基于电动化动力传动系统在最小阈值车辆速度下的扭矩输送能力限制车轮扭矩来动态地和预测性地减轻电动化动力传动系统的振荡。
[0047]
用于执行程序300的指令可以由车辆控制器(例如,12)基于存储在车辆控制器的非暂时性存储器上的指令并结合从各种传感器(例如,16)和车辆系统(例如,100)的其他部件接收的信号来执行。此外,车辆控制器可以采用各种致动器(例如,81)来调整车辆操作,例如响应于电池soc小于或等于阈值soc,可以命令电机(例如,52)在整个车辆起动和随后的高速操作中以小于或等于前馈扭矩极限向一个或多个驱动轮(例如,47)输送扭矩。因而,程序300可以通过主动地限制车轮扭矩来实现nvh降低,由此避免与所输送的车轮扭矩的尖峰相关联的动力传动系统振荡并提高操控性和操作员满意度。
[0048]
在302处,程序300可以包括接收车辆起动请求。例如,车辆系统(例如,100)的操作员可以在车辆速度为零时经由车辆系统的致动(例如,通过转动钥匙、按下机械按钮、致动灯、移动和/或重量传感器等)来生成车辆起动请求。另外或替代地,可以自主地(例如,在没有操作员输入的情况下)接收车辆起动请求。
[0049]
在304处,程序300可以包括估计和/或测量一个或多个车辆工况。在示例性实施例中,一个或多个车辆工况可以包括当前操作员扭矩需求(例如,车轮扭矩,以及马达扭矩,并且在混合动力传动系统实施例中,发动机扭矩)、所请求的辅助负荷(例如,针对车辆系统的辅助系统命令的电气负荷)、当前车辆速度、电气和机械损耗以及车辆起动与车辆推进之间的持续时间中的一者或多者。在附加的或替代实施例中,一个或多个车辆工况可以包括一个或多个电池状况,诸如电池soc、瞬时放电功率极限(例如,电池当前可用的电池放电功率)、(当前)电池放电功率、电池温度、电池电流容量等。在附加的或替代实施例中,所述一个或多个车辆工况可以包括车辆系统的周围环境的一个或多个环境状况,诸如环境温度、环境湿度、环境压力、海拔等。
[0050]
在一些示例中,车辆控制器(例如,12)可以使用所述一个或多个车辆工况来表征车辆系统(例如,100)的当前操作状态。作为一个示例,车辆控制器可以响应于环境温度和/或电池温度低于或等于阈值温度而确定或推断车辆起动对应于车辆冷起动。在示例性实施例中,阈值温度可以是0℃。在非限制性示例中,可以至少响应于对车辆冷起动的确定而限制车轮扭矩。
[0051]
在一些示例中,所述一个或多个车辆工况可以由通信地联接到车辆控制器(例如,12)的一个或多个传感器来测量,或者可以基于可用数据来推断。作为一个示例,电池温度可以经由电池温度传感器(例如,49)直接测量,或者基于经由外部温度传感器测量的环境温度、电池相对于外部温度传感器的位置以及是否实施辅助电池加热来估计。作为另一个示例,瞬时放电功率极限可以基于从电压表(例如,50)和电流表(例如,51)中的每一者接收的反馈来确定,或者从存储在控制器(例如,12)的非暂时性存储器中的一个或多个查找表、函数或映射图中检索,所述一个或多个查找表、函数或映射图接收电池soc和电池温度中的一者或多者作为输入。
[0052]
作为又一示例,可以利用存储在控制器(例如,12)的非暂时性存储器中的一个或多个查找表、函数或映射图来检索阈值soc,诸如在306处,程序300可以包括基于阈值放电功率和所述电池温度中的一者或多者来确定或推断阈值soc。具体地,阈值放电功率和电池
温度中的一者或多者可以作为一个或多个输入提供给一个或多个查找表、函数或映射图,所述一个或多个查找表、函数或映射图可以输出阈值soc。
[0053]
在一些示例中,电池soc可以用作根据电池温度加权的电池放电功率的代理。在此类示例中,电池温度可以向映射图提供附加输入,可以根据所述附加输入来选择阈值soc。另外或替代地,可以考虑电池温度,并且可以仅根据阈值放电功率来估计阈值soc。例如,诸如当车辆系统基本上仅在较温暖的气候中操作时或者当电池加热器(例如,46)被提供以基本上将电池温度维持在有限电池温度范围内时,可以预期车辆系统(例如,100)在有限的电池温度范围内操作。
[0054]
如下文参考图4详细地描述,阈值放电功率可以存储在控制器(例如,12)的非暂时性存储器中,并且可以对应于在请求车轮扭矩在最小阈值车辆速度下处于车辆系统(例如,100)的最大扭矩能力时由车辆系统消耗的电池放电功率。在一些示例中,可以确定阈值soc,使得当瞬时放电功率极限大于阈值放电功率时,电池soc可以大于阈值soc,并且因此可以请求车轮扭矩在最小阈值车辆速度下处于车辆系统的最大扭矩能力,直到可用车轮扭矩下降到低于所述最大扭矩能力。此外,在此类示例中,当瞬时放电功率极限小于或等于阈值放电功率时,电池soc可以小于或等于阈值soc,并且可以替代地请求车轮扭矩处于前馈扭矩极限,直到达到最小阈值车辆速度(如下文详细讨论的)。另外或替代地,可以基于瞬时放电功率极限来选择阈值电池放电功率,高于所述瞬时放电功率极限,在阈值频率以下或阈值振幅以下发生动力传动系统振荡(假设允许全马达扭矩)。
[0055]
在308处,程序300可以包括确定电池soc是否小于或等于阈值soc。如果确定电池soc大于阈值soc,则程序300可以进行到310,其中程序300可以包括操作车辆系统(例如,100),同时基于车辆系统的最大扭矩能力来限制车轮扭矩。具体地并且如上文讨论的,电池soc大于阈值soc可以指示瞬时放电功率极限高于阈值放电功率。因而,并且如下面参考图5详细描述的,可用车轮扭矩可以替代地基于可以由电池(例如,45)提供给电机(例如,52)并从电机输送到一个或多个驱动轮(例如,47)的最大扭矩量来限制。因此,可以不对车轮扭矩施加主动限制来减轻动力传动系统振荡,因为当电池具有相对较高的瞬时放电功率极限时,不太可能发生动力传动系统振荡。此外,在一些示例中,由车辆系统(例如,100)的一个或多个驱动轮(例如,47)的推进所消耗的电池放电功率也可能受到电池向电机可输送的最大扭矩量的限制。通过这种方式,响应于期望的电池状况,例如高电池soc和/或高电池温度,车辆系统可能不会主动地限制扭矩超过车辆系统的扭矩输送能力。
[0056]
如果确定电池soc小于或等于阈值soc,则程序300可以进行到312,其中程序300可以包括基于瞬时放电功率极限和最小阈值车辆速度来确定或推断前馈扭矩极限。在一些示例中,前馈扭矩极限可以被定义为瞬时放电功率极限与最小阈值车辆速度的比率。具体地,由于车轮扭矩与车辆速度成反比关系,因此在不实施主动限制的情况下,可以在相对较低的车辆速度下获得大量的车轮扭矩。为了避免在车辆速度增加时车轮扭矩的大幅偏移,可以将最小阈值车辆速度校准到足够高(例如,非零)车辆速度,使得此时的最大可用车轮扭矩在相对较低的电池放电功率可用时相对较低(替代地,在相对较高的电池放电功率可用时,诸如上面在310处详细讨论的,电池(例如,45)可输送的最大扭矩可以替代地限制命令的车轮扭矩,由此避免车轮扭矩大幅偏移)。因此,前馈扭矩极限可以对应于在最小阈值车辆速度下可以由电池提供(例如,由电池soc限制)给电机(例如,52)并从电机输送到一个或
多个驱动轮(例如,47)的最大扭矩量。通过这种方式,可以经由前馈控制来选择最小阈值车辆速度以对命令的车轮扭矩设定主动限制,由此减轻在相对较低的车辆速度下由于命令的车轮扭矩的大幅偏移而导致的动力传动系统振荡。
[0057]
在314处,程序300可以包括操作车辆系统(例如,100),同时基于前馈扭矩极限来限制车轮扭矩。具体地并且如上文讨论的,电池soc小于或等于阈值soc可以指示瞬时放电功率极限小于或等于阈值放电功率。此外,在一些示例中,由于前馈扭矩极限可以限制可用车轮扭矩,因此在车辆速度小于最小阈值车辆速度下,车辆系统的一个或多个驱动轮(例如,47)的推进可以消耗小于瞬时放电功率极限的电池放电功率。通过这种方式并且如下面参考图5详细描述的,将车轮扭矩限制为前馈扭矩极限可能导致车轮扭矩输送低于电池(例如,45)在车辆起动期间在车辆速度小于最小阈值车辆速度时经由将放电电池功率主动限制小于瞬时放电功率极限而最大程度地输送的车轮扭矩。在一些示例中,在较高车辆速度下仍然可以应用前馈扭矩极限以限制车轮扭矩。然而,由于电池可输送到电机(例如,52)的最大扭矩在车辆速度高于最小阈值车辆速度时可能低于前馈扭矩极限,因此实际上在此类较高车辆速度下不会发生车轮扭矩的主动限制。相反,车轮扭矩可以由在当前车辆速度下可以由电池提供(例如,由电池soc限制)给电机并从电机输送到一个或多个驱动轮(例如,47)的最大扭矩量动态地限制。
[0058]
此外,由于瞬时放电功率极限、电池soc和电池温度在接收到车辆起动请求时可能受到一个或多个车辆工况限制,因此在一些示例中,最小阈值车辆速度可以是车辆控制器(例如,12)在确定前馈扭矩极限时唯一可动态校准的条件(例如,可以基于最小阈值车辆速度在前馈控制环路中控制前馈扭矩极限)。在车辆速度小于最小阈值车辆速度时电池(例如,45)可输送到电机(例如,52)的最大扭矩可以高于在车辆速度大于或等于最小阈值车辆速度时电池可输送到电机的最大扭矩,因为电池在任何给定的车辆速度下可输送的最大扭矩可以被定义为瞬时放电功率极限与给定的车辆速度的比率(使得更低的车辆速度导致更高的最大扭矩)。通过这种方式,可以基于前馈扭矩极限来限制一个或多个驱动轮(例如,47)可用的车轮扭矩,以便减轻由于命令的车轮扭矩的大幅偏移引起的动力传动系统振荡。
[0059]
无论是根据电池(例如,45)可输送到电机(例如,52)的最大扭矩还是根据前馈扭矩极限来限制电池放电功率和车轮扭矩,程序300都可以进行到316,其中程序300可以包括确定在较高车辆速度下的起动后漂移之后当前车辆速度是否已经返回到或已经下降低于最小阈值车辆速度。如果当前车辆速度尚未返回到或已经维持高于最小阈值车辆速度,则程序300可以进行到318,其中程序300可以包括继续车辆操作,同时基于电池可输送的最大扭矩或前馈扭矩极限(例如,根据在308处确定电池soc是否小于或等于阈值soc)来限制电池放电功率和车轮扭矩。程序300可以循环回到316。
[0060]
如果当前车辆速度已经返回到或已经下降到低于最小阈值车辆速度,则程序300可以进行到320,其中程序300可以包括确定是否已经接收到车辆关闭请求。例如,车辆系统(例如,100)的操作员可以在车辆速度为零时经由车辆系统的致动(例如,通过转动钥匙、按下机械按钮、致动灯、移动和/或重量传感器等)来生成车辆关闭请求。另外或替代地,可以自主地(例如,在没有操作员输入的情况下)接收车辆关闭请求。如果未接收到车辆关闭请求,则程序300可以返回到304,此时程序300可以再次循环通过反馈控制环路。通过这种方式,每当当前车辆速度下降到低于最小阈值车辆速度时(例如,在再次加速到较高车辆速度
之前的瞬态制动和停止期间),都可以重新确定阈值soc并且可以根据重新确定的阈值soc来重新评估车轮扭矩极限。
[0061]
如果接收到车辆关闭请求,则程序300可以进行到322,其中程序300可以包括关闭车辆系统(例如,100)。具体地,电动化动力传动系统(例如,105)的主动操作可以停止,直到接收到另一个车辆起动请求。因此,程序300可以返回。通过这种方式,可以在整个车辆操作中通过前馈控制来限制车轮扭矩(例如,即使在较高的车辆速度和瞬态漂移恢复到低于最小阈值车辆速度的情况下),使得可以防止车辆系统命令车轮扭矩尖峰,这可能导致电动化动力传动系统的振荡。
[0062]
现在参考图4,描绘了示出五个示例性电池温度下的作为电池放电功率的函数的电池soc的映射图400。在一些示例中,映射图400可以由车辆系统的车辆控制器(诸如上面参考图1详细描述的车辆系统100的控制器12)使用来确定阈值soc,根据所述阈值soc,可以(例如,响应于电池soc小于或等于阈值soc)实施对车辆系统的车轮扭矩的前馈控制。在此类示例中,电池soc和电池放电功率可以是与可再充电车辆电池或电池组(诸如系统电池45)相对应的示例性值。五个电池温度可以是相对较低的温度(例如,小于或等于0℃),对于所述温度,电池操作低于预期。例如,可再充电车辆电池在此类低温下可能具有低放电能力。因此,阈值soc可以基于电池温度而变化,因为较低的电池soc可以对应于较高电池温度下的较高电池放电功率。
[0063]
如映射图400中所示,横坐标表示电池soc,并且纵坐标表示电池放电功率。放电功率曲线401、402、403、404和405中的每一者分别对应于不同的电池温度,所述电池温度根据该排序升高。具体地,与放电功率曲线401相对应的电池温度可以低于与放电功率曲线402相对应的电池温度,与放电功率曲线402相对应的电池温度可以低于与放电功率曲线403相对应的电池温度,与放电功率曲线403相对应的电池温度可以低于与放电功率曲线404相对应的电池温度,并且与放电功率曲线404相对应的电池温度可以低于与放电功率曲线405相对应的电池温度。
[0064]
还示出了表示阈值放电功率的长虚线410。具体地,阈值放电功率可以对应于在请求车轮扭矩在可校准最小阈值车辆速度下处于车辆系统(例如,100)的最大扭矩能力时由车辆系统消耗的电池放电功率。在一些示例中,阈值soc可以直接对应于阈值放电功率,因为对车轮扭矩的前馈控制可以响应于可再充电车辆电池可用的电池放电功率相对较低(例如,小于或等于阈值放电功率)而期望地实施(因为在相对较低的车辆速度下响应于命令的车轮扭矩的大幅偏移而对这种低电池放电功率节流可能会生成动力传动系统振荡)。因此,给定电池温度的阈值soc可以基于可再充电车辆电池在给定电池温度下的放电能力而变化。
[0065]
具体地并且如图所示,短虚线411、412、413、414和415分别对应于针对放电功率曲线401、402、403、404和405确定的阈值soc,线411、412、413、414和415中的每一者分别包括放电功率曲线401、402、403、404和405与线410的交点(例如,分别对应于对于给定电池温度可获得阈值放电功率的电池soc)。由于较低的电池温度可能导致较低的放电能力,因此阈值soc可能会随着电池温度的降低而增加。因此,与线411相对应的阈值soc可以小于与线412相对应的阈值soc,与线412相对应的阈值soc可以小于与线413相对应的阈值soc,与线413相对应的阈值soc可以小于与线414相对应的阈值soc,并且与线414相对应的阈值soc可
以小于与线415相对应的阈值soc。通过这种方式,可以基于电池温度和在请求车轮扭矩在最小阈值车辆速度下处于车辆系统(例如,100)的最大扭矩能力时车辆系统消耗的电池放电功率来选择调节进入车轮扭矩的前馈控制的阈值soc。
[0066]
现在参考图5,描绘了示出作为在最小阈值车辆速度下的示例性瞬时放电功率极限的函数的车轮扭矩的前馈控制的映射图500。在一些示例中,映射图500可以由车辆系统的车辆控制器(诸如上面参考图1详细描述的车辆系统100的控制器12)使用来确定在车辆起动期间在较低车辆速度下以及在车辆起动后维持较高车辆速度时对车辆系统的车轮扭矩的限制。在此类示例中,瞬时放电功率极限可以是与可再充电车辆电池或电池组(诸如系统电池45)相对应的示例性值。在一些示例中,如果确定最小阈值车辆速度下的给定瞬时放电功率极限小于或等于与在请求车轮扭矩在最小阈值车辆速度下处于车辆系统(例如,100)的最大扭矩能力时所述车辆系统消耗的电池放电功率相对应的阈值放电功率,则可以基于给定的瞬时放电功率极限而不是阈值放电功率来限制输送到一个或多个驱动轮(例如,47)的车轮扭矩。
[0067]
如映射图500中所示,横坐标表示车辆速度,并且纵坐标表示车轮扭矩。扭矩曲线501、502、503、504、505和506中的每一者分别对应于不同的瞬时放电功率极限,所述瞬时放电功率极限根据该排序增加。具体地,与扭矩曲线501相对应的瞬时放电功率极限可以小于与扭矩曲线502相对应的瞬时放电功率极限,与扭矩曲线502相对应的瞬时放电功率极限可以小于与扭矩曲线503相对应的瞬时放电功率极限,与扭矩曲线503相对应的瞬时放电功率极限可以小于与扭矩曲线504相对应的瞬时放电功率极限,与扭矩曲线504相对应的瞬时放电功率极限可以小于与扭矩曲线505相对应的瞬时放电功率极限,并且与扭矩曲线505相对应的瞬时放电功率极限可以小于与扭矩曲线506相对应的瞬时放电功率极限。
[0068]
还示出了表示最小阈值车辆速度的长虚线510和表示车辆系统(例如,100)的最大扭矩能力的长虚线520。具体地,最小阈值车辆速度可以是所选择的非零车辆速度,使得将可输送到一个或多个驱动轮(例如,47)的车轮扭矩限制为小于或等于最小阈值车辆速度与对应扭矩曲线的交点处的车轮扭矩针对相对较低的瞬时放电功率极限减轻了电动化动力传动系统(例如,105)的振荡。然而,在相对较高的瞬时放电功率极限下,车辆系统的最大扭矩能力在最小阈值车辆速度下可能低于在最小阈值车辆速度与对应扭矩曲线的交点处的车轮扭矩。
[0069]
具体地并且如图所示,短虚线511、512、513和514分别对应于针对扭矩曲线501、502、503和504确定的前馈扭矩极限,线511、512、513和514中的每一者分别包括扭矩曲线501、502、503和504与线510的交点(例如,分别对应于对于给定的瞬时放电功率极限在最小阈值车辆速度下可用的车轮扭矩)。由于较高的瞬时放电功率极限可能导致较高的可输送车轮扭矩,因此前馈扭矩极限可以随着瞬时放电功率极限的增加而增加。因此,与线511相对应的前馈扭矩极限可以小于与线512相对应的前馈扭矩极限,与线512相对应的前馈扭矩极限可以小于与线513相对应的前馈扭矩极限,并且与线513相对应的前馈扭矩极限可以小于与线514相对应的前馈扭矩极限。
[0070]
对于小于或等于最大扭矩能力(线520)的瞬时放电功率极限,响应于车辆速度小于或等于最小阈值车辆速度(线510),车辆系统(例如,100)可以在请求车轮扭矩处于前馈扭矩极限时(例如,沿着线511、512和513)操作,并且响应于车辆速度大于最小阈值车辆速
度,车辆系统可以在请求车轮扭矩小于前馈扭矩极限时(例如,分别对于与线511、512和513相对应的前馈扭矩极限,沿着扭矩曲线501、502和503)操作。然而,对于大于最大扭矩能力的瞬时放电功率极限,响应于命令的车轮扭矩小于或等于最大扭矩能力(例如,包括在车辆速度小于或等于最小阈值车辆速度时的车辆操作),车辆系统可以在请求车轮扭矩处于最大扭矩能力时(例如,沿着与线520重叠的短虚线521)操作,并且响应于命令的车轮扭矩大于最大扭矩能力,车辆系统可以在请求车轮扭矩小于最大扭矩能力时(例如,沿着扭矩曲线504、505或506)操作。通过这种方式,当可再充电车辆电池当前可获得相对较低的电池放电功率时,可以实施前馈控制以限制车轮扭矩。
[0071]
现在参考图6,示出了描绘基于在车辆起动时车辆电池可输送的最大扭矩来限制车辆的车轮扭矩的示例性操作的时间线600。例如,示例性操作可以对应于包括车辆电池的电动化动力传动系统(诸如上面参考图1所述的车辆系统100的电动化动力传动系统105和系统电池45),车辆电池的电池soc在整个示例性操作中保持相对较低。具体地,电池soc可以保持小于阈值soc,所述阈值soc对应于在请求车轮扭矩在最小阈值车辆速度下处于车辆的最大扭矩能力时由车辆消耗的电池放电功率。电池放电功率对应地为低,电动化动力传动系统的振荡可能由于在低电池放电功率下存在的命令的车轮扭矩的未减轻的上下偏移而演变。因此,示例性操作可以被认为是车辆系统在选定状况下的示例性实施例,其中命令的车轮扭矩的前馈控制尚未被实施或校准,或者正发生故障。
[0072]
时间线600描绘了实曲线601处的加速踏板位置、实曲线611处的车辆加速度、实曲线621处的车辆速度、实曲线631处的车轮扭矩、实曲线641处的电池soc、实曲线651处的电池放电功率以及实曲线661处的电池温度。另外,虚曲线622表示最小阈值车辆速度,虚曲线632表示车辆起动时车辆电池可输送的最大车轮扭矩,虚曲线642表示与在请求车轮扭矩在最小阈值车辆速度下处于车辆的最大扭矩能力时车辆消耗的电池放电功率相对应的阈值soc,并且虚曲线652表示车辆电池的瞬时放电功率极限。所有曲线都随时间推移描绘并且沿着横坐标绘制,其中时间在横坐标上从左至右增加。此外,沿着对应的纵坐标绘制由上文讨论的每条曲线表示的因变量,其中因变量在给出纵坐标上从下至上增加(除非另有说明或示出)。
[0073]
在t1之前,车辆可能会关闭,并且其中的电动化动力传动系统可能不会将车轮扭矩输送到车辆的驱动轮。在t1处,可以在车辆处接收(例如,自主地或由其操作员提供)车辆起动请求,并且由此操作员可以例如通过从零车辆加速度的默认位置踩下加速踏板来致动加速踏板(曲线601)。在致动加速踏板时,车辆加速度(曲线611)和车辆速度(曲线621)可以响应于电动化动力传动系统的致动而增加。
[0074]
具体地,在t1处,车辆电池可以开始向电动化动力传动系统的电机输送功率,例如电池soc(曲线641)可以开始减小并且电池放电功率(曲线651)可以开始增加。电机可以由此生成可输送到一个或多个驱动轮的扭矩(曲线631)。在整个车辆起动期间,电池温度(曲线661)可以保持相对较冷(例如,低于0℃,如图所示,但是较高的电池温度可能导致类似的车辆操作),从而进一步限制电池放电功率。此外,在整个车辆操作中,电池soc可以保持小于阈值soc(曲线642),并且电池放电功率可以保持小于瞬时放电功率极限(曲线652)。
[0075]
如图所示,在t1之后,车轮扭矩(曲线631)可以快速增加到车辆起动时可输送的最大车轮扭矩(曲线632),从而导致电动化动力传动系统的振荡(例如,诸如电池放电功率的
振荡656)。此类振荡可能影响车辆的操控性,并且可能会被操作员体验为分别至少表现为车辆加速度和车辆速度的振荡616和626的nvh问题。
[0076]
在t2处,随着车辆速度(曲线621)增加,车轮扭矩(曲线631)可以开始快速减小到低于车辆起动时可输送的最大车轮扭矩(曲线632)。在t2至t3之间,随着车辆速度继续增加[例如,增加到高于最小阈值车辆速度(曲线622)],车轮扭矩的快速减小可以转变为更平缓的减小趋势,并且振荡616、626和656可能会消散。
[0077]
在t3之后,车辆可以根据典型的起动后操作进行操作。在稍后的时间点,车辆可以响应于接收到车辆关闭请求(例如,自主地或来自操作员)而关闭。
[0078]
现在参考图7,示出了描绘基于前馈控制环路限制车辆中的车轮扭矩的示例性操作的时间线700。例如,示例性操作可以对应于包括车辆电池的电动化动力传动系统(诸如上面参考图1所述的车辆系统100的电动化动力传动系统105和系统电池45),车辆电池的电池soc在整个示例性操作中保持相对较低。具体地,电池soc可以保持小于阈值soc,所述阈值soc对应于在请求车轮扭矩在最小阈值车辆速度下处于车辆的最大扭矩能力时由车辆消耗的电池放电功率。电池放电功率对应地较低,由电动化动力传动系统输送的车轮扭矩可以在车辆速度小于最小阈值车辆速度时主动地降低,使得可以基本上消除由于在低电池放电功率下存在的命令的车轮扭矩的未减轻上下偏移引起的电动化动力传动系统的振荡。在示例性实施例中,可以根据接收最小阈值车辆速度作为输入的前馈控制环路来限制所输送的车轮扭矩,其中可以采用在最小阈值车辆速度下可用的车轮扭矩来限制整个车辆操作中的可输送车轮扭矩。
[0079]
在一些示例中,可以在车辆操作期间(例如,在瞬态低车辆速度漂移期间)动态地调整阈值soc,使得可以在减轻动力传动系统振荡的同时使车轮扭矩输送最大化。例如,随着车辆电池的电池温度升高,车辆电池可能能够处理较低的电池放电功率下命令的车轮扭矩的较大幅偏移,而不会引起动力传动系统振荡。在这样的示例中,当在车辆已经以较高车辆速度操作(例如,典型的起动后操作)之后车辆速度再次减小到最小阈值车辆速度时,可以降低阈值soc以考虑车辆电池的这种增加的能力。因此,在更具限制性的状况下(例如,在降低的电池soc状况下),可以根据前馈控制环路来限制车轮扭矩。
[0080]
时间线700描绘了实曲线701处的加速踏板位置、实曲线711处的车辆加速度、实曲线721处的车辆速度、实曲线731处的车轮扭矩、实曲线741处的电池soc、实曲线751处的电池放电功率以及实曲线761处的电池温度。另外,长虚曲线722表示最小阈值车辆速度,长虚曲线732表示车辆起动时车辆电池可输送的最大车轮扭矩,长虚曲线733表示前馈扭矩极限,短虚曲线736和737表示在不实施前馈扭矩极限的情况下可用的假设车轮扭矩,长虚曲线742表示与在请求车轮扭矩在最小阈值车辆速度下处于车辆的最大扭矩能力时车辆消耗的电池放电功率相对应的阈值soc,短虚曲线747表示在动态调整后高于阈值soc的假设电池soc,并且长虚曲线752表示车辆电池的瞬时放电功率极限。所有曲线都随时间推移描绘并且沿着横坐标绘制,其中时间在横坐标上从左至右增加。此外,沿着对应的纵坐标绘制由上文讨论的每条曲线表示的因变量,其中因变量在给出纵坐标上从下至上增加(除非另有说明或示出)。
[0081]
在t4之前,车辆可能会关闭,并且其中的电动化动力传动系统可能不会将车轮扭矩输送到车辆的驱动轮。在t4处,可以在车辆处接收(例如,自主地或由其操作员提供)车辆
起动请求,并且由此操作员可以例如通过从零车辆加速度的默认位置踩下加速踏板来致动加速踏板(曲线701)。在致动加速踏板时,车辆加速度(曲线711)和车辆速度(曲线721)可以响应于电动化动力传动系统的致动而增加。
[0082]
具体地,在t4处,车辆电池可以开始向电动化动力传动系统的电机输送功率,例如电池soc(曲线741)可以开始减小并且电池放电功率(曲线751)可以开始增加。电机可以由此生成可输送到一个或多个驱动轮的扭矩(曲线731)。在整个车辆起动期间,电池温度(曲线761)可以保持相对较冷(例如,低于0℃,如图所示,但是前馈扭矩控制和较高的电池温度可能导致类似的车辆操作),从而进一步限制电池放电功率。此外,在整个车辆操作中,电池soc可以保持小于阈值soc(曲线742),并且电池放电功率可以保持小于瞬时放电功率极限(曲线752)。
[0083]
如图所示,在t4之后,车轮扭矩(曲线731)可以朝向车辆起动时可输送的最大车轮扭矩(曲线732)快速增加。然而,因为已经施加了前馈扭矩极限(曲线733)以主动地限制车轮扭矩,所以车轮扭矩可以停止增加并且最初保持小于可用的假设车轮扭矩(曲线736)。结果,可以避免电动化动力传动系统的振荡,否则可能会导致振荡(例如,如果命令了全假设车轮扭矩)。
[0084]
在t5处,随着车辆速度(曲线721)增加超过最小阈值车辆速度(曲线722),车轮扭矩(曲线731)可以开始快速减小到低于基于在最小阈值车辆速度下的可用车轮扭矩定义的前馈扭矩极限(曲线733)。因此,在所描绘的示例中,当车辆速度小于或等于最小阈值车辆速度并且电池soc(曲线741)小于阈值soc(曲线742)时(例如,在t4至t5之间),可以仅命令车轮扭矩处于前馈扭矩极限。此外,当车辆速度高于最小阈值车辆速度时(例如,在t5处并且在此后的典型车辆操作的持续时间内),可以命令车轮扭矩小于前馈扭矩极限。通过这种方式限制车轮扭矩可以避免快速增加和减少,否则如果在电池soc小于阈值soc时命令可用的假设车轮扭矩(曲线736),则在t4至t5之间将导致快速增加和减少。此后(例如,在t5至t6之间),车轮扭矩可以逐渐减小。
[0085]
在t6之后,车辆可以根据典型的起动后操作进行操作。在t6至t7之间,通过横坐标的间断指示延长的时间间隔,在所述间隔期间在车辆速度高于最小阈值车辆速度时可以一致地使用车辆。
[0086]
紧接在t7之前,车辆可以开始滑行,使得车辆速度和车轮扭矩可以开始减小。在t7至t8之间继续滑行,其中车辆速度(曲线721)继续减小并且车辆加速度和车轮扭矩保持为负(未示出)。在一些示例中,在滑行期间的再生制动可以重定向负车轮扭矩以驱动电机,使得电机可以作为发电机操作并对车辆电池充电[如图所示,电池soc(曲线741)可以在t7之后增加并且可以继续增加,直到在t9处再次施加正车轮扭矩]。
[0087]
在t8处,车辆速度(曲线721)可以达到最小阈值车辆速度(曲线722)。因此,考虑到一个或多个车辆工况的变化,可以重新确定阈值soc(曲线742)。例如,电池温度(曲线761)可能在t4处的车辆起动与车辆速度在t8处返回到最小阈值车辆速度之间增加。在较高的电池温度下,车辆电池可能能够处理车轮扭矩的较大幅偏移而不会生成严重的动力传动系统振荡。因此,阈值soc可以降低,使得如果电池soc增加到高于阈值soc[(例如,高于前馈扭矩极限(曲线733)],则可以请求更大的车轮扭矩。
[0088]
如图所示,电池soc(曲线741)可以保持小于在t8处降低时的阈值soc(曲线741),
并且因此可以维持对车轮扭矩(曲线731)的前馈控制。因此,当在t9处再次致动加速踏板(曲线701)时,车辆电池可以开始向电机输送功率,例如电池soc(曲线741)可以开始减小并且电池放电功率(曲线751)可以开始增加。电机可以生成可输送到一个或多个驱动轮的扭矩(曲线731)。车辆加速度(曲线711)可以由此响应于电动化动力传动系统的致动而增加,使得车辆速度(曲线721)在t9之后停止下降并再次上升。
[0089]
如图所示,在t9之后,车轮扭矩可以朝向车辆起动时可输送的最大车轮扭矩(曲线732)快速增加。然而,因为已经维持前馈扭矩极限(曲线733)以主动地限制车轮扭矩,所以车轮扭矩可以停止增加并且保持小于可用的假设车轮扭矩(曲线737),直到车辆速度(曲线721)再次增加到高于最小阈值车辆速度。结果,可以避免电动化动力传动系统的振荡,否则可能会导致振荡(例如,如果命令了全假设车轮扭矩)。
[0090]
然而,如果电池soc反而高于至少在其降低之后的阈值soc(曲线742)(如曲线747所示),则对车轮扭矩的前馈控制将停止并且车轮扭矩将根据可用的假设车轮扭矩(曲线737)而增加。通过这种方式,即使在先前已经在同一车辆操作期间(例如,没有中间车辆关闭)施加了对车轮扭矩的前馈控制,车辆也可以在相对较低的车辆速度下可用的最大车轮扭矩下的车轮扭矩操作(例如,直到曲线732)。
[0091]
在t10处,随着车辆速度(曲线721)增加超过最小阈值车辆速度(曲线722),车轮扭矩(曲线731)可以开始快速减小到低于前馈扭矩极限(曲线733)。因此,在所描绘的示例中,当车辆速度小于或等于最小阈值车辆速度并且电池soc(曲线741)小于阈值soc(曲线742)时(例如,在t9至t10之间),可以仅命令车轮扭矩处于前馈扭矩极限。此外,当车辆速度高于最小阈值车辆速度时(例如,在t10处并且在此后的典型车辆操作的持续时间内),可以命令车轮扭矩小于前馈扭矩极限。通过这种方式限制车轮扭矩可以避免快速增加和减少,否则如果在电池soc小于阈值soc时命令可用的假设车轮扭矩(曲线737),则在t9至t10之间将导致快速增加和减少。此后(例如,在t10至t11之间),车轮扭矩可以逐渐减小。
[0092]
在t11之后,车辆可以根据典型的起动后操作进行操作。在稍后的时间点,车辆可以响应于接收到车辆关闭请求(例如,自主地或来自操作员)而关闭。
[0093]
通过这种方式,提供了用于减轻车辆的电动化动力传动系统处的振荡的系统和方法。在一个示例中,可以经由前馈控制环路动态地限制为车辆推进请求的车轮扭矩。前馈控制环路可以接收车辆电池的瞬时放电功率极限和最小阈值车辆速度作为输入,由此可以确定车轮扭矩的前馈扭矩极限。在一些示例中,前馈扭矩极限的确定可以响应于车辆电池的荷电状态(soc)小于或等于阈值soc。可以基于车辆电池的温度和在请求车轮扭矩在最小阈值车辆速度下处于车辆的最大扭矩能力时由车辆消耗的电池放电功率来估计阈值soc。因而,在车辆冷起动期间可以减小所请求的车轮扭矩,其中车辆电池具有相对较低的soc和/或车辆电池经历相对较低的温度。
[0094]
在一些示例中,可以在整个车辆操作中(例如,在较高车辆速度下以及在低于最小阈值车辆速度的后续漂移期间)保持前馈扭矩极限。在一个示例中,每当车辆速度从较高车辆速度减小到最小阈值车辆速度时,都可以响应于继续满足一个或多个车辆工况(例如,低放电功率、低soc、低电池温度等)而动态地更新前馈扭矩极限。当在相对较低的车辆速度下满足一个或多个车辆工况时命令减小车轮扭矩的技术效果是可以在车辆电池的各种功率水平上动态地且预测地减轻电动化动力传动系统的振荡。
[0095]
在一个示例中,一种用于在起动期间操作车辆的方法包括:响应于所述车辆的电池组当前可用的所述放电功率小于或等于阈值放电功率以及进一步响应于当前车辆速度小于或等于阈值车辆速度,在请求车轮扭矩处于前馈扭矩极限时操作所述车辆,所述前馈扭矩极限是基于所述阈值车辆速度和所述电池组当前可用的所述放电功率。所述方法的第一示例还包括:响应于所述当前车辆速度大于所述阈值车辆速度,在请求所述车轮扭矩小于所述前馈扭矩极限时操作所述车辆。所述方法的第二示例(任选地包括所述方法的第一示例)还包括其中所述阈值放电功率对应于在请求所述车轮扭矩在所述阈值车辆速度下处于所述车辆的最大扭矩能力时所述车辆消耗的放电功率。所述方法的第三示例(任选地包括所述方法的第一示例和第二示例中的一者或多者)还包括响应于所述电池组当前可用的所述放电功率大于所述阈值放电功率并且所述当前车辆速度小于或等于所述阈值车辆速度,在请求所述车轮扭矩处于所述车辆的所述最大扭矩能力时操作所述车辆。所述方法的第四示例(任选地包括所述方法的第一示例至第三示例中的一者或多者)还包括响应于所述电池组当前可用的所述放电功率小于或等于所述阈值放电功率并且进一步响应于所述当前车辆速度小于所述阈值车辆速度,操作所述车辆使得推进所述车辆的一个或多个驱动轮从所述电池组消耗的放电功率小于所述电池组当前可用的所述放电功率。所述方法的第五示例(任选地包括所述方法的第一示例至第四示例中的一者或多者)还包括其中仅在所述当前车辆速度小于或等于所述阈值车辆速度的状况期间请求所述车轮扭矩处于所述前馈扭矩极限时操作所述车辆。所述方法的第六示例(任选地包括所述方法的第一示例至第五示例中的一者或多者)还包括其中所述车辆是纯电动车辆。所述方法的第七示例(任选地包括所述方法的第一示例至第六示例中的一者或多者)还包括其中所述车辆是在起动期间以纯电动模式操作的混合动力电动车辆。
[0096]
在另一个示例中,一种车辆系统包括:多个驱动轮;电动马达,所述电动马达被配置为将扭矩输送到所述多个驱动轮;电池,所述电池被配置为向所述电动马达提供电力;以及控制器,所述控制器被配置为执行可执行以进行以下各项的指令:在响应于所述电池的荷电状态(soc)小于或等于阈值soc而发起的第一起动状况期间,从所述电动马达请求第一扭矩量,所述第一扭矩量是基于所述电池的放电功率与最小阈值车辆速度的比率。所述车辆系统的第一示例还包括其中响应于当前车辆速度小于或等于所述最小阈值车辆速度而从所述电动马达请求所述第一扭矩量。所述车辆系统的第二示例(任选地包括所述车辆系统的所述第一示例)还包括其中所述指令还可执行以在所述第一起动状况期间将可输送到所述多个驱动轮的扭矩量限制为小于或等于阈值扭矩量,所述阈值扭矩量是基于所述电池的瞬时放电功率极限与所述最小阈值车辆速度的比率。所述车辆系统的第三示例(任选地包括所述车辆系统的第一示例和第二示例中的一者或多者)还包括其中基于所述最小阈值车辆速度在前馈控制环路中控制所述阈值扭矩量。所述车辆系统的第四示例(任选地包括所述车辆系统的第一示例至第三示例中的一者或多者)还包括其中所述多个驱动轮、所述电动马达和所述电池包括在所述车辆系统的动力传动系统中,所述最小阈值车辆速度被选择使得将可输送到所述多个驱动轮的扭矩量限制为小于或等于所述阈值扭矩量减轻在所述第一起动状况期间所述动力传动系统的振荡。所述车辆系统的第五示例(任选地包括所述车辆系统的第一示例至第四示例中的一者或多者)还包括:电压表,所述电压表被配置为生成指示所述电池两端的电势差的反馈;以及电流表,所述电流表被配置为生成指示所述
电池的电流的反馈,其中所述控制器可通信地耦接到所述电压表和所述电流表,并且其中所述指令还可执行以在所述第一起动状况期间:从所述电压表和所述电流表中的每一者接收所述反馈;并且基于所接收到的反馈来估计所述瞬时放电功率极限。所述车辆系统的第六示例(任选地包括所述车辆系统的第一示例至第五示例中的一者或多者)还包括其中所述指令还可执行以在所述第一起动状况期间,从存储在所述控制器的非暂时性存储器中的一个或多个查找表、函数或映射图中检索所述瞬时放电功率极限,所述一个或多个查找表、函数或映射图接收所述soc和所述电池的温度中的一者或多者作为输入。所述车辆系统的第七示例(任选地包括所述车辆系统的第一示例至第六示例中的一者或多者)还包括其中所述指令还可执行以从存储在所述控制器的非暂时性存储器中的一个或多个查找表、函数或映射图中检索所述阈值soc,所述一个或多个查找表、函数或映射图接收在请求在所述最小阈值车辆速度下可输送到所述多个驱动轮的最大扭矩量时所述车辆系统消耗的所述电池的放电功率作为输入。所述车辆系统的第八示例(任选地包括所述车辆系统的第一示例至第七示例中的一者或多者)还包括其中所述指令还可执行以在响应于所述soc大于所述阈值soc而发起的第二起动状况期间,从所述电动马达请求第二扭矩量,所述第二扭矩量是基于所述电动马达可输送的最大扭矩量。所述车辆系统的第九示例(任选地包括所述车辆系统的第一示例至第八示例中的一者或多者)还包括其中所述指令还可执行以在响应于当前车辆速度大于所述最小阈值车辆速度而发起的起动后状况期间,从所述电动马达动态地请求第三扭矩量,所述第三扭矩量是基于所述放电功率与所述当前车辆速度的比率。
[0097]
在又一示例中,一种用于车辆冷起动的方法包括:响应于在接收到与所述车辆冷起动相对应的车辆起动请求时可再充电电池组的温度低于或等于阈值温度,接收所述车辆起动请求;响应于所述车辆起动请求并且所述可再充电电池组的荷电状态(soc)小于或等于阈值soc,基于放电功率极限与最小阈值车辆速度的比率来限制驱动轮扭矩;以及响应于所述soc大于所述阈值soc,基于所述可再充电电池组的最大扭矩能力来限制所述驱动轮扭矩。所述方法的第一示例还包括其中所述阈值soc是基于在接收到所述车辆起动请求时所述可再充电电池组的所述温度。
[0098]
在另一种表示中,一种用于车辆的方法包括:响应于放电功率小于阈值放电功率和车辆速度小于阈值车辆速度中的每一者而命令车轮扭矩小于所述车辆的最大车轮扭矩可用性;以及响应于所述车辆速度大于或等于所述阈值车辆速度而命令所述车轮扭矩处于所述最大车轮扭矩可用性。
[0099]
应当理解,本文中公开的配置和程序本质上是示例性的,并且这些具体实施例不应被视为具有限制性含义,因为众多变化是可能的。此外,除非明确地相反指出,否则术语“第一”、“第二”、“第三”等不意图表示任何顺序、位置、数量或重要性,而是仅用作标记以区分一个元件与另一个元件。本公开的主题包括本文中公开的各种系统和配置以及其他特征、功能和/或性质的所有新颖的且非明显的组合和子组合。
[0100]
所附权利要求特别地指出被视为新颖和非明显的某些组合和子组合。这些权利要求可指代“一个”要素或“第一”要素或其等同物。这些权利要求应理解为包括一个或多个此类要素的结合,既不要求也不排除两个或更多个此类要素。所公开特征、功能、元件和/或性质的其他组合和子组合可通过修正本权利要求或通过在此申请或相关申请中呈现新的权利要求来要求保护。此类权利要求与原始权利要求相比无论在范围上更宽、更窄、等同或不
同,也都被视为包括在本公开的主题内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1