用于采用随机化零序分量调适脉冲宽度调制的系统和方法与流程
1.本说明书总体上涉及用于采用随机化零序分量来调适脉冲宽度调制以减少车厢中的噪声的方法和系统。
背景技术:
2.诸如混合动力电动车辆或纯电动车辆的车辆可以包括能够独立于内燃发动机供应足够的动力来推进车辆的电动化动力传动系统。这种电动化动力传动系统可以包括电动马达和被配置为向电动马达供电的电源,诸如可再充电电池或电池组。由电源供电的电动马达经由驱动轴向车辆的一个或多个驱动轮提供扭矩,由此推进车辆。用于电动化动力传动系统的电力电路可以包括用于从电源提供交流电的逆变器,其中电力电路控制调整逆变器的开关来以各种组合断开和闭合以向电动马达提供期望电压。具体地,电力电路可以使用脉冲宽度调制(pwm)技术来接通和关断开关,其中开关接通和关断的速率或频率通常取决于马达转速或扭矩需求。以某些开关频率控制开关可能会产生车辆乘员可听到的噪声。
3.先前解决此类pwm声发射的尝试包括在其中pwm噪声可能更明显的车辆工况期间使用更高的开关频率,所述开关频率对于车辆乘员来说可能是不易听到的。sankaran等人在u.s.8,649,923中示出了一种示例性方法。其中,以默认模式或降噪模式控制逆变器,其中默认模式使用人类可听范围内的较低开关频率,而降噪模式使用人类可听范围之外的较高开关频率。wolf等人在u.s.10,259,340中示出了另一种示例性方法。其中,根据基于转子扭矩的概率权重来选择用于控制逆变器的离散开关频率,使得逆变器以离散开关频率操作的概率随着转子扭矩的改变而改变。
4.然而,本文的发明人已认识到此类系统的潜在问题。作为一个示例,默认模式的使用取决于可能掩蔽可听pwm声发射的替代噪声源的存在,而降噪模式的较高开关频率引起系统中的功率损耗,这可能降低混合动力车辆的燃料经济性并增加电力电路成本。此外,这种方法的校准是困难的,因为车辆噪声的掩蔽本质由于不同的驾驶员行为、路面和环境噪声状况而固有地变化,这可能无法仅通过设计来完全考虑。更进一步地,选择pwm开关频率的概率方法几乎没有余地在不对扭矩产生有负面影响的情况下通过pwm调适降低附加nvh。
技术实现要素:
5.在一个示例中,上述问题可以通过一种用于控制车辆的电动化动力传动系统的方法来解决,所述方法包括基于随机分布来确定所述车辆的电机的零序电压,所述随机分布基于所述零序电压的潜在范围来缩放,以及基于所述确定的零序电压来调整所述电机的电压参考信号以降低所述车辆中的环境声学噪声。以这种方式,无论用于选择pwm开关频率的方法如何并且在不影响电机的扭矩产生的情况下,都可以减少由电机的pwm控制引起的声发射。
6.作为一个示例,使零序电压(也称为共模电压)随机化导致在开关周期内随机调整pwm脉冲的位置而不以其他方式改变pwm控制信号(例如,不改变脉冲宽度、开关频率、振幅
等)。因此,当与现有的pwm方案(诸如抖动和随机pwm)相组合时,使零序电压随机化能够增加频谱能量分散并对应地减少pwm声发射。此外,由于三相y形连接电机的零序电压不会导致电流在电机的绕组中流动,因此当零序被随机化时,扭矩产生不会改变,如本文进一步描述。以这种方式,可以在所有操作点上减少任何pwm方案的声发射,而不会影响电动化传动系的效率。
7.应当理解,提供以上发明内容是为了以简化的形式介绍在具体实施方式中进一步描述的一系列概念。它并不意味着确定所要求保护的主题的关键或必要特征,主题的范围由具体实施方式之后的权利要求唯一地限定。此外,所要求保护的主题不限于解决上文或本公开的任何部分中提及的任何缺点的实现方式。
附图说明
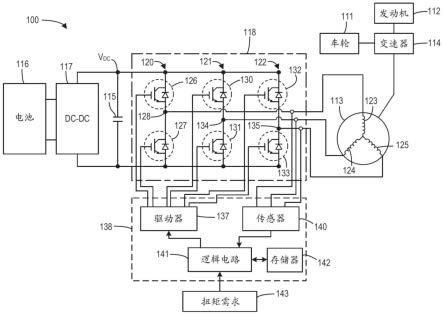
8.图1示出了示出车辆系统的示例性电动化动力传动系统的示意图。
9.图2示出了示出用于电动化动力传动系统的电机的示例性相电压命令的曲线图。
10.图3示出了示出图2的示例性相电压命令的潜在零序电压的示例性范围的曲线图。
11.图4示出了示出用于对称pwm的示例性pwm命令和零序电压边界的曲线图。
12.图5示出了示出用于不对称pwm的示例性pwm命令和零序电压边界的曲线图。
13.图6示出了示出用于利用零序随机化的pwm控制的示例性方法的高级流程图。
14.图7示出了示出用于不同零序方案的示例性相电压命令的一组曲线图。
15.图8示出了示出图7的示例性相电压命令的示例性零序电压的曲线图。
16.图9示出了示出用于不同零序方案的示例性pwm占空比命令的曲线图。
17.图10示出了示出在利用零序随机化和空间矢量调制的pwm调适期间的示例性功率谱密度的曲线图。
具体实施方式
18.以下描述涉及用于缓解由车辆电驱动系统(诸如包括在图1的车辆系统中的电动化动力传动系统)的脉冲宽度调制(pwm)控制产生的噪声、振动和粗糙性(nvh)的系统和方法。脉冲宽度调制(pwm)通常用于将电力从电池传递到电动化车辆动力传动系统的电机,其中可以实施不同的pwm方案以控制电子开关的断开和闭合,并且因此经由开关调节从电池到电机的电力传递。由于各种开关的接通和关断可能在某些开关频率下产生可听噪声,因此选择开关频率以减少声音发射,同时解决对马达转速、扭矩要求和燃料效率的需求。此外,由于三相y形连接电机的共模电压(也称为零序电压)不会使电流在电机的绕组中流动,从而不会导致电机的扭矩产生,可以调整零序电压以修改用于电机的参考电压波形而不影响扭矩产生。零序电压的潜在范围在给定的采样时刻受到参考电压波形和逆变器的电压限制的限制,如图2和图3所描绘。关于pwm控制信号本身,这种限制确保pwm脉冲在pwm开关周期内保持其脉冲宽度,尽管添加了零序也是如此,如图4和图5所描绘。一种用于电机的pwm控制的方法诸如图6所示的方法因此包括针对pwm控制的每个采样周期随机地在零序电压的潜在范围内选择零序电压。因此,相对于修改零序电压的其他非随机方法,零序电压随时间的随机化改变相电压波形,如图7和图8所描绘。零序电压的变化导致pwm控制信号的对应变化,如图9所示。以这种方式使脉冲移位随机化导致特别是与随机开关频率相结合的情况
下pwm相关内容相对于其他非随机零序修改的频谱分散增加,如图10所示。pwm声发射的这些改进可以通过具有最小校准的随机化零序电压并且在没有扭矩产生的成本的情况下实现。
19.转到附图,图1示出了混合动力电动车辆100,作为用于实现如本文所述的pwm的一种类型的车辆。车轮111可以由内燃发动机112和/或由牵引马达113经由变速器114驱动。为了提供电推进,马达113可以经由逆变器开关桥118来驱动,所述逆变器开关桥在直流侧电容器115处接收直流侧电压v
dc
。直流侧电压v
dc
可以由转换器117对来自电池组116的dc电力的转换产生。控制器138可以控制逆变器开关桥(在本文中也称为逆变器118)以将电力从电池组或电池116传递到电机或马达113,所述电机或马达可以包括三相y形连接的电机,如图所描绘。
20.在一些示例中,车辆100可以是具有对一个或多个车轮111可用的多个扭矩源的混合动力车辆。在其他示例中,车辆100是仅具有电机的电动车辆。在所示的示例中,车辆100包括发动机112和电机或马达113。电机113可以是马达或马达/发电机。当一个或多个离合器(未示出)接合时,发动机112的曲轴和电机113经由变速器114连接到车轮111。作为说明性示例,第一离合器可以设置在发动机112的曲轴和电机或马达113之间,并且第二离合器可以设置在电机113和变速器114之间。控制器138可向每个离合器的致动器发送信号来使离合器接合或脱离,以便将发动机曲轴与电机113以及与电机连接的部件连接或断开,和/或将电机113与变速器114以及与变速器连接的部件连接或断开。变速器114可以是齿轮箱、行星齿轮系统或另一种类型的变速器。
21.动力传动系统可以通过各种方式配置,这些方式包括并联、串联或串并联式混合动力车辆。在电动车辆实施例中,系统电池116可以是牵引电池,所述牵引电池将电力输送到电机113以向车轮111提供扭矩。在一些实施例中,电机113还可以充当发电机以例如在制动操作期间提供电力来对系统电池116充电。应当理解,在包括非电动车辆实施例的其他实施例中,系统电池116可以是耦合到交流发电机(未示出)的典型的起动、照明、点火(sli)电池。
22.逆变器118包括耦合到马达113的马达相绕组123、124和125的相桥120、121和122。相桥120包括上开关装置126和下开关装置127,所述上开关装置和下开关装置串联连接在直流侧115上并且在装置126和127之间提供连接到马达113的绕组123的接点128。类似地,相桥121包括上开关装置130和下开关装置131,而相桥122包括上开关装置132和下开关装置133。接点134和135分别耦合到马达绕组124和125。
23.开关装置可以包括绝缘栅双极晶体管(igbt)、反并联二极管、宽带隙场效应晶体管(fet)或其他装置。上开关装置和下开关装置中的每一者包括耦合到控制器138中的驱动器137的相应栅极端子。耦合到相桥的每个接点的电流传感器140测量通过每个相绕组的电流。测量的电流幅值从传感器140提供到控制器138中的逻辑电路141,以用于确定将由驱动器137施加到开关装置的pwm开关信号。可以将测量的电流与根据扭矩需求143确定的期望的马达电流进行比较,所述扭矩需求可以从诸如加速踏板的操作员输入得到,使得操作员可以控制车辆速度。因此,电流反馈确定逻辑电路141内的pwm占空比,所述pwm占空比然后用于生成相桥开关装置的pwm开关信号的定时。
24.控制器138在图1中被示出为微计算机,其可以包括微处理器单元、输入/输出端
口、用于可执行程序(例如,可执行指令)和校准值的电子存储介质或存储器142,其中存储器142可以包括一个或多个易失性和/或非易失性存储器元件,包括非暂时性只读存储器芯片、随机存取存储器、保活存储器和数据总线中的一者或多者。因此,控制器138的逻辑电路141可以包括处理器。在一些示例中,存储器142可以集成到逻辑电路141中。控制器138可以从联接到马达113以及发动机112的传感器140接收各种信号,包括先前论述的信号并且另外包括:例如,来自质量空气流量传感器的进气质量空气流量(maf)的测量值;来自联接到冷却套筒的温度传感器的发动机冷却剂温度(ect);来自联接到排气通道的温度传感器的排气温度;来自联接到发动机112的曲轴的霍尔效应传感器(或其他类型)的表面点火感测信号(pip);来自节气门位置传感器的节气门位置信号(tp);来自排气传感器的信号ugeo,其可以由控制器138使用来确定排气的afr;来自爆震传感器的爆震信号;以及来自歧管压力(map)传感器的绝对map信号。控制器138可以从pip信号中产生发动机转速信号rpm。来自map传感器的歧管压力信号map可以用于提供对进气歧管中的真空或压力的指示。控制器138可以基于发动机冷却剂温度来推断发动机温度。
25.控制器138从各种传感器140接收信号,处理所接收的信号,并采用图1的各种致动器(例如,与发动机112、变速器114、逆变器118的开关装置等等相关)以基于所接收的信号和存储在控制器138的存储器142上的指令来调整车辆操作。例如,控制器138可以从踏板位置传感器(未示出)接收踏板位置信号,处理踏板位置信号以确定扭矩需求143,并且根据扭矩需求控制电机113来向车轮111提供扭矩。为了根据需要控制电机113,例如,控制器138可以控制逆变器118的一个或多个电子开关或开关装置接通和/或关断以便选择性地调节从电池116到电机113的电力输送。
26.例如,由逻辑电路141执行的程序可以作为可执行指令存储在逻辑电路141的存储器142中。程序可以包括一个或多个附加或单独的程序,其中的每一者包括用于实施与控制器138相关联的逻辑功能的可执行指令的有序列表。例如,逻辑功能可以包括根据存储在逻辑电路141的存储器内的表来控制逆变器118。
27.具体地,脉冲宽度调制(pwm)技术用于控制开关,并且逻辑电路141可以根据需要命令逆变器118的上开关装置和下开关装置断开和闭合。逆变器118的每个开关装置的开关频率或每个开关装置接通和关断的速率通常由马达转速或扭矩要求以及燃料效率考虑因素来确定。由于各种开关的接通和关断可能在某些开关频率下产生可听噪声,因此选择开关频率以减少声音发射,同时解决对马达转速、扭矩要求和燃料效率的需求。用于控制逆变器118的特定pwm方案或pwm操作模式可以取决于车辆的各种工况。作为说明性和非限制性示例,pwm方案或模式可以包括一个或多个pwm实施策略,诸如连续pwm、不连续pwm、随机pwm、固定频率pwm等。此外,不同的pwm模式可以包括被配置用于以降低的噪声执行pwm的降噪模式以及被配置用于将燃料效率最大化的燃料效率模式。作为示例,对于降噪模式,可以在增加或降低车辆速度的时段期间将高开关频率与随机pwm或另一pwm策略一起使用,在所述时段中开关噪声可能更明显,因为高频率可能是人类听不到的。相比之下,对于燃料效率模式,低开关频率可以与pwm策略一起使用以减少功率损耗,所述功率损耗例如可能进而影响燃料效率,尽管这种低开关频率存在潜在可听性。此外,抖动可以与用于控制开关的任何pwm模式结合使用。通常,在车辆操作期间,控制器138基于车辆的工况(诸如车辆速度、扭矩需求等)来选择用于控制逆变器118并且因此驱动马达113的pwm方案,其中pwm方案包括pwm
实施策略(例如,随机pwm、连续pwm等)、pwm模式(例如,降噪模式、燃料效率模式等)以及其他因素(例如,抖动)。
28.此外,即使在其中选择开关频率以减少声音发射的降噪模式中,pwm方案中的各种考虑因素也可能导致在车厢内可听到pwm声发射。控制器(诸如控制器138)可以执行pwm调适方法,其以pwm连续运行,以随机地调整电机(诸如电机或马达113)的零序电压。三相y形连接电机(诸如马达113)的零序电压不会导致电流在电机的绕组中流动,并且因此不会影响扭矩产生。使电机的电压参考信号的零序分量随机化导致pwm控制信号的脉冲移位的随机化。因此,零序电压的随机化提供了超出通过pwm实现策略(诸如随机pwm)实现的频谱分散的附加频谱分散,其中pwm开关频率是随机化的。
29.图2示出了示出用于电动化动力传动系统的电机(诸如电机或马达113)的示例性相电压命令的曲线图200。具体地,曲线图200描绘了三相y形连接电机的相a、b和c的第一相电压命令205、第二相电压命令210和第三相电压命令215。如图所描绘,相电压命令205、210和215受dc电压v
dc
约束。
30.零序电压具有由各个相电压命令205、210和215以及dc电压v
dc
确定的潜在范围。具体地,潜在的零序电压被约束,使得当添加到单独的相电压命令时,零序电压与相电压命令组合不超过dc电压v
dc
的限制。因此,在时间t1处,最小零序电压222和最大零序电压224指示可以在时间t1添加到相电压命令而不超过dc电压v
dc
的最小和最大零序电压。类似地,在时间t2处,最小零序电压232和最大零序电压234指示可以在时间t2添加到相电压命令而不超过dc电压v
dc
的最小和最大零序电压。最大和最小零序电压包括零序电压的潜在范围的边界。作为说明性示例,图3示出了示出图2的用于示例性相电压命令的潜在零序电压随时间的示例性范围305的曲线图。如本文进一步描述的,可以从潜在的零序电压的范围305内随机地选择零序电压。通过针对给定的相电压命令在潜在的零序电压范围内随机地选择零序电压,可以增加频谱能量分散(例如,减少pwm声发射)而不影响电机的扭矩产生。
31.为了进一步示出潜在零序电压的边界,图4示出了示出用于对称pwm的示例性pwm命令和零序边界的曲线图400。对于对称pwm,每个开关循环确定一次占空比和开关模式,其中作为说明性示例,每个开关循环的持续时间以及因此采样周期为(t
2-t1)。如所描绘的,第一pwm命令410、第二pwm命令420和第三pwm命令430的脉冲的中心在每个开关循环内在时间上对准。每个采样周期的潜在零序的边界对应于不会将开关时刻推入相邻采样周期的添加的零序的量。因此,对于在时间t1开始的采样周期,相对于所述周期内的最宽脉冲(例如,如所描绘的第三pwm命令430的脉冲)测量的最小零序441和最大零序443(例如,分别为zs
min
(t1)和zs
max
(t1))包括可以分别添加到采样周期内的pwm命令410、420和430的开始和结束而不将脉冲推入相邻采样周期的零序的量。类似地,最小零序445包括可以添加到从时间t2开始的采样周期内的pwm命令410、420和430的开始而不将从时间t2开始的采样周期内的脉冲推动到相邻采样周期(例如,不将pwm命令410、420和430的脉冲从t2之后延伸到t2之前)的最大零序。
32.作为另一个示例,图5示出了示出用于不对称pwm的示例性pwm命令和零序电压边界的曲线图500,其中pwm占空比和开关模式每个开关循环更新两次。对于不对称pwm,每个开关循环可以选择零序两次,因此每个开关循环有两个采样周期。例如,如所描绘的,开关循环从时间t1延伸到时间t3,其中第一采样周期从时间t1延伸到时间t2并且第二采样周期
从时间t2延伸到时间t3。类似地,所描绘的第二开关循环从时间t3延伸到时间t5(未描绘),其中第三采样周期从时间t3延伸到时间t4并且第四采样周期从时间t4延伸到时间t5。如所描绘的,第一pwm命令510、第二pwm命令520和第三pwm命令530的脉冲的中心在每个开关循环内在时间上对准并居中,并且采样周期在时间上与脉冲的中心(例如,第二采样周期和第四采样周期在时间t2和t4开始)重合。
33.对于不对称pwm,如图所描绘,下限或最小零序541是可以添加到范围从时间t1至t2的第一采样周期内的pwm命令510、520和530的开始而不将开关时刻(例如,脉冲的竖直变化)推入相邻采样周期(例如,推到时间t1之前的采样周期)的最大零序,而上限或最大零序543是可被添加到第一采样周期内的pwm命令510、520和530的结束而不将开关时刻推入相邻采样周期(例如,推到时间t2之后的第二采样周期)的最大零序。最小零序545和最大零序547类似地指示时间t2与t3之间的第二采样周期内的潜在零序的下限和上限,而最小零序551和最大零序553指示如所描绘的在时间t3与t4之间的第三采样周期内的潜在零序的下限和上限。
34.图6示出了示出用于根据实施例的利用零序随机化的pwm控制以增加频谱能量分散的示例性方法600的高级流程图。用于执行方法600和本文包括的其余方法的指令可以由控制器基于存储在控制器的存储器上的指令并结合从车辆系统的传感器(诸如上文参考图1描述的传感器)接收的信号来执行。例如,方法600可以被实施为在控制器138的非暂时性存储器142中的可执行指令,所述可执行指令在由逻辑电路141执行时使控制器138执行本文所述的动作。
35.方法600开始于605。在605处,方法600评估采样周期的工况。作为说明性和非限制性示例,所述工况可以包括以下中的一者或多者:来自电流传感器(诸如传感器140)的马达电流信号,所述马达电流信号测量在电机113中流动的电流作为扭矩的量度;来自旋转传感器的监测旋转作为速度的量度的马达位置信号;输入电压(诸如施加到逆变器桥的直流侧电压);扭矩或速度需求;以及pwm是否有效。例如,可以基于踏板位置来评估诸如扭矩或速度需求的工况。如果pwm有效,则工况还可以包括与pwm方案相关的一个或多个参数。
36.在610处,方法600确定pwm是否有效。如果pwm无效(“否”),则方法600继续到615,其中方法600维持工况并且不随机化零序电压。方法600然后返回。
37.然而,再次参考610,如果pwm有效(“是”),则方法600继续到620。在620处,方法600确定在采样周期内用于电机的相电压命令。相电压命令包括电机的每个相的目标相电压,并且因此方法600可以基于扭矩需求来确定相电压命令。方法600还可以基于电机的扭矩输出(例如,如在605处根据马达电流信号评估的)和电机的转子转速(例如,如在605处根据马达位置信号评估的)中的一者或多者来确定相电压命令。方法600可以基于扭矩需求、扭矩输出和转子转速中的一者或多者通过使用在给定输入的情况下输出相电压命令的一个或多个函数来生成相电压命令,其中所述一个或多个函数可以根据给定pwm方案来选择。
38.在625处继续,方法600基于随机分布随机地选择采样周期的值。例如,方法600可以随机地选择0与1之间的值,其中随机值均匀地分布在0与1之间,使得随机分布包括对于0与1之间的每个值具有相等概率的均匀随机分布。在其他示例中,可以改变随机分布以降低某些值的概率并增加其他值的概率。例如,可以改变这种随机分布以取决于车辆的操作点。作为一个示例,随机分布可以包括伯努利分布。将伯努利分布用于随机分布可以导致随机
选择潜在零序的上边界或下边界,这对应于不连续pwm(dpwm),其中选择零序使得相中的一者在给定的开关周期期间不开关。以这种方式,dpwm的开关损耗降低可以与来自随机化零序的nvh的降低相组合。
39.在基于随机分布随机地选择采样周期的值之后,方法600继续到630。在630处,方法600基于相电压命令来确定零序电压的潜在范围。例如,对于相电压命令的集合,其中t是当前采样周期的采样时刻(例如,其中评估工况以在紧接在采样时刻之后的采样周期期间控制车辆的采样时刻),方法600根据下式计算采样时刻t处的最小零序minzs[t]:
[0040][0041]
以及根据下式计算在采样时刻t的最大零序maxzs[t]:
[0042][0043]
因此,最小和最大零序形成零序电压的潜在范围的边界。应当理解,上述等式可以被调适为使得相对于采样时刻t处的dc总线电压v
dc
来确定最小和最大零序。
[0044]
在635处继续,方法600基于随机选择的值和零序电压的潜在范围来计算零序电压。例如,对于随机选择的值r、最小零序minzs[t]和最大零序maxzs[t],方法600根据下式计算零序电压zs[t]:
[0045]
zs[t]=minzs[t]+r
·
(maxzs[t]-minzs[t])。
[0046]
以这种方式,由于随机选择的值r,零序电压zs[t]因此包括在采样周期内由最小和最大零序电压界定的零序电压的潜在范围内的随机值。
[0047]
在640处,方法600用零序电压调整相电压命令。例如,方法600将随机化的零序电压zs[t]加到相电压命令:
[0048][0049]
其中v
′
abc
[t]包括经调整的相电压命令。
[0050]
在645处,方法600基于经调整的相电压命令来确定pwm占空比信号。例如,方法600计算pwm占空比信号以驱动pwm用于逆变器118的上开关和下开关,使得逆变器118将输入到逆变器118的dc总线电压v
dc
转换成ac电力,特别是与经调整的相电压命令相对应的各个相电压信号,然后将所述各个相电压信号提供给马达113的相应绕组123、124和125。在650处,方法600利用pwm占空比信号来控制逆变器,诸如逆变器118。方法600然后返回。
[0051]
因此,方法600使相电压命令的零序分量在pwm的单个采样周期内随机化。可以在每个采样周期期间执行方法600,使得零序分量通过pwm控制随时间而随机化。
[0052]
作为说明性示例,图7示出了示出用于不同零序方案的随时间的示例性相电压命令的一组曲线图700。具体地,曲线图710示出了三相电机(诸如马达113)的第一相a的第一相电压va的相电压命令,曲线图720示出了三相电机的第二相b的第二相电压vb的相电压命令,并且曲线图730示出了三相电机的第三相c的第三相电压vc的相电压命令。不同的零序方案包括正弦三角形调制(stm)方案,其中不存在零序电压;基于中心的空间矢量调制(csvm)方案,其中零序电压交替以确保脉冲在开关窗口或pwm周期内保持居中;不连续pwm(dpwm)方案,其中选择零序电压,使得所得相电压中的一者始终处于最大值或最小值,从而
导致所得相中的一者在给定开关周期期间不开关;以及随机化零序(rzs)方案,其中如本文所述对于每个采样周期使用均匀随机分布将零序电压随机化。
[0053]
对于stm方案,曲线图710描绘了stm相电压712,曲线图720描绘了stm相电压722,并且曲线图730描绘了stm相电压732。三个相a、b和c的stm相电压712、722和732分别包括在dc总线电压的电压限制内操作的简单正弦曲线。
[0054]
对于csvm方案,曲线图710描绘了csvm相电压714,曲线图720描绘了csvm相电压724,并且曲线图730描绘了csvm相电压734。csvm相电压714、724和734包括使有效电压周期在每个开关周期内居中的零序电压。
[0055]
对于dpwm方案,曲线图710描绘了dpwm相电压716,曲线图720描绘了dpwm相电压726,并且曲线图730描绘了dpwm相电压736。dpwm相电压716、726和736包括被选择以确保一个相被钳位到最大或最小可用电压的零序电压。
[0056]
对于rzs方案,曲线图710描绘了rzs相电压718,曲线图720描绘了rzs相电压728,并且曲线图730描绘了rzs相电压738。零序电压的随机化以及pwm开关频率的随机化导致相电压的显着增加,高达在一些采样周期期间逆变器的极限。然而,以这种方式随机地修改零序电压并因此随机地修改相电压不会改变电机或马达的电流基波,并且因此不会影响扭矩产生。以这种方式,使零序电压随机化会破坏开关模式,而不会破坏电动化传动系的扭矩产生。
[0057]
图8示出了示出图7的示例性相电压命令的示例性零序电压的曲线图800。具体地,曲线图800描绘了用于stm方案的零序电压802、用于csvm方案的零序电压804、用于dpwm方案的零序电压806以及用于rzs方案的零序电压808。如上文所述,stm方案的零序电压802随时间推移恒定为零,因为stm不存在零序电压。csvm方案的零序电压804交替以确保脉冲在开关窗口内保持居中,如上文所述。dpwm方案的零序电压806随时间交替,使得所得相电压中的一者在任何给定时间处于最大或最小可能电压。与其他零序电压802、804和806相比,用于rzs方案的零序电压808在如图所描绘的采样周期之间随机变化。应当理解,当从图7的相应相电压中减去零序电压802、804、806和808时,所得的相电压与stm相电压712、722和732相同。
[0058]
为了说明随机化零序对用于控制逆变器的pwm占空比信号的影响,图9示出了示出用于上文讨论的不同零序方案的示例性pwm占空比命令的曲线图900。具体地,曲线图900包括用于stm方案的占空比命令910、用于csvm方案的占空比命令920、用于dpwm方案的占空比命令930和用于rzs方案的占空比命令940,其中相对于相同的pwm载波信号950描绘占空比命令,并且其中曲线图900的竖直虚线描绘pwm周期。
[0059]
如所描绘的,无论零序如何,每个pwm周期内的每个有效脉冲的脉冲宽度都是相同的。调整零序而不是改变脉冲宽度来调整每个pwm周期内的位置有效脉冲。因此,stm占空比命令910完全由基础电压命令定义。如由csvm占空比命令920所描绘,有效脉冲在每个pwm周期内居中。dpwm占空比命令930示出了相邻脉冲被组合成单个脉冲,从而消除了一些开关事件并减少了开关损耗。rzs占空比命令940示出了有效脉冲随机地位于pwm周期内。
[0060]
图10示出了曲线图1000,其示出了在利用基于中心的空间矢量调制(csvm)的pwm调适期间逆变器电压v
dq
的示例性功率谱密度(psd)1005和在利用零序随机化或rzs调适pwm期间逆变器电压v
dq
的示例性功率谱密度1010。如上文所讨论的,csvm包括将零序电压设置
为在采样时刻的最大零序电压与最小零序电压之间的中点,例如使得r为0.5,而rzs包括根据随机分布从集合(0,1)中随机地选择r的值。出于该示例的目的,使用均匀随机分布作为rzs的随机分布。此外,对于csvm和rzs pwm方案两者,使用随机pwm,使得pwm开关频率随机变化。
[0061]
通过如本文所述使零序电压随机化(如由rzs功率谱密度1010的对应峰值大小所描绘)来减小pwm相关内容的峰值大小,诸如在频率
±
8khz处的csvm功率谱密度1005中的峰值。因此,rzs pwm方案相对于如所描绘的csvm pwm,并且特别是相对于stm和dpwm pwm方案实现了提高的频谱分散。
[0062]
本公开的技术效果包括在电动化动力传动系统的脉冲宽度调制控制期间减少来自电动化动力传动系统的声发射。本公开的另一个技术效果包括车辆的电动化动力传动系统的三相y形连接电机的共模电压或零序电压的随机化。本公开的又一技术效果包括在电动化动力传动系统的脉冲宽度调制控制中增加的频谱能量分散。本公开的另一个技术效果包括电压脉冲在pwm开关周期内的随机调整位置。
[0063]
作为一个实施例,一种用于车辆的方法包括基于随机分布来确定所述车辆的电机的零序电压,所述随机分布基于所述零序电压的潜在范围来缩放,以及基于所确定的零序电压来调整所述电机的电压参考信号以降低所述车辆中的环境声学噪声。
[0064]
在所述方法的第一示例中,所述方法还包括基于第二随机分布来确定所述电机的脉冲宽度调制电压的开关频率。在任选地包括所述第一示例的所述方法的第二示例中,所述随机分布包括均匀随机分布。在任选地包括所述第一示例和所述第二示例中的一者或多者的所述方法的第三示例中,所述方法还包括基于所述车辆的一个或多个工况来选择随机分布,其中所述随机分布包括选择的随机分布。在任选地包括所述第一示例至所述第三示例中的一者或多者的所述方法的第四示例中,所述方法还包括:根据扭矩需求来确定所述电机的目标电压命令,以及针对所述电机的所述目标电压命令确定所述零序电压的所述潜在范围。在任选地包括所述第一示例至所述第四示例中的一者或多者的所述方法的第五示例中,所述方法还包括:相对于用于所述电机的逆变器的电压限制针对所述电机的所述目标电压命令确定所述零序电压的所述潜在范围。在任选地包括所述第一示例至所述第五示例中的一者或多者的所述方法的第六示例中,相对于用于所述电机的所述逆变器的所述电压限制针对所述电机的所述目标电压命令确定所述零序电压的所述潜在范围包括确定相对于所述逆变器的所述电压限制在采样时刻的针对所述目标电压命令的最小零序电压和最大零序电压,其中所述零序电压的所述潜在范围从所述最小零序电压延伸到所述最大零序电压。在任选地包括所述第一示例至所述第六示例中的一者或多者的所述方法的第七示例中,基于基于所述零序电压的所述潜在范围缩放的所述随机分布来确定所述零序电压包括从所述零序电压的所述潜在范围中随机地选择所述零序电压。在任选地包括所述第一示例至所述第七示例中的一者或多者的所述方法的第八示例中,所述方法还包括基于针对所述电机的脉冲宽度调制控制的每个采样周期的所述随机分布来确定所述电机的所述零序电压。在任选地包括所述第一示例至所述第八示例中的一者或多者的所述方法的第九示例中,所述电机包括所述车辆的电动化动力传动系统的三相y形连接电机。
[0065]
在另一个实施例中,一种方法包括:在用于车辆的电机的逆变器的脉冲宽度调制控制的采样时刻,确定在所述采样时刻之后的采样周期内的所述电机的目标电压命令,针
对所述目标电压命令随机地选择零序电压,利用随机选择的零序电压来调整所述目标电压命令,根据经调整的目标电压命令来更新用于所述电机的所述逆变器的所述脉冲宽度调制控制,并且在所述采样周期期间用更新的脉冲宽度调制控制来驱动所述逆变器。
[0066]
在所述方法的第一示例中,所述方法还包括在所述采样周期内在采样时刻测量所述电机的扭矩输出和所述电机的转子转速,接收所述采样周期内采样时刻的所述电机的扭矩需求,以及基于所述测量的扭矩输出、所述测量的转子转速和所述接收到的扭矩需求来确定所述采样周期内的所述电机的所述目标电压命令。在任选地包括所述第一示例的所述方法的第二示例中,所述方法还包括将所述逆变器的所述脉冲宽度调制控制的开关频率随机化。在任选地包括所述第一示例和所述第二示例中的一者或多者的所述方法的第三示例中,针对所述目标电压命令随机地选择所述零序电压包括针对所述目标电压命令确定零序电压的潜在范围,并且根据随机分布从针对所述目标电压命令的零序电压的所述潜在范围中随机地选择所述零序电压。在任选地包括所述第一示例至所述第三示例中的一者或多者的所述方法的第四示例中,所述随机分布包括均匀随机分布或被配置有与所述电机的选定操作点相对应的概率的伯努利分布中的一者。
[0067]
在又一个实施例中,一种用于车辆的系统包括:多个驱动轮;电动马达,所述电动马达被配置为向所述多个驱动轮递送扭矩;电池,所述电池被配置为向所述电动马达提供电力;以及控制器,所述控制器被配置为:随机地选择用于所述电动马达的零序电压;以及基于随机选择的零序电压来调整所述电机的电压参考信号以降低所述车辆中的环境声学噪声。
[0068]
在所述系统的第一示例中,所述系统还包括逆变器,所述逆变器被配置为响应于脉冲宽度调制(pwm)信号将电力从所述电池传递到所述电动马达,并且所述控制器还被配置为:根据经调整的电压参考信号来更新所述pwm信号;并且用更新的pwm信号驱动所述逆变器。在任选地包括所述第一示例的所述系统的第二示例中,所述控制器还被配置为随机地选择所述pwm信号的开关频率。在任选地包括所述第一示例和所述第二示例中的一者或多者的所述系统的第三示例中,所述控制器还被配置为:根据扭矩需求确定所述电动马达的目标电压命令;针对所述电动马达的所述目标电压命令确定零序电压的潜在范围;并且从零序电压的所述潜在范围中随机地选择所述零序电压。在任选地包括所述第一示例至所述第三示例中的一者或多者的所述系统的第四示例中,所述控制器还被配置为:基于随机分布从零序电压的所述潜在范围中随机地选择所述零序电压,所述随机分布包括均匀随机分布或被配置有与所述电动马达的操作点相对应的概率的伯努利分布中的一者。
[0069]
应当注意,本文所包括的示例性控制和估计例程可以与各种发动机和/或车辆系统配置一起使用。本文公开的控制方法和例程可作为可执行指令存储在非暂时性存储器中,并且可由包括控制器的控制系统结合各种传感器、致动器和其他发动机硬件来实施。本文所述的具体例程可表示任何数目的处理策略(诸如事件驱动的、中断驱动的、多任务的、多线程的等)中的一个或多个。因此,所示的各种动作、操作和/或功能可以按所示的顺序执行、并行执行,或者在一些情况下被省略。同样,处理顺序不一定是实现本文描述的示例性实施例的特征和优点所必需的,而是为了便于说明和描述而提供。可根据所使用的特定策略而重复地执行示出的动作、操作和/或功能中的一个或多个。另外,所描述的动作、操作和/或功能可图形地表示将被编程到发动机控制系统中的计算机可读存储介质的非暂时性
存储器中的代码,其中所描述的动作通过结合电子控制器在包括各种发动机硬件部件的系统中执行指令来实施。
[0070]
应当理解,本文中公开的配置和例程本质上是示例性的,并且这些具体实施例不应被视为具有限制性含义,因为众多变化是可能的。例如,上述技术可应用于v-6、i-4、i-6、v-12、对置4缸以及其他发动机类型。此外,除非明确地相反指出,否则术语“第一”、“第二”、“第三”等不意图表示任何顺序、位置、数量或重要性,而是仅用作标记以区分一个元件与另一个元件。本公开的主题包括本文公开的各种系统和配置以及其他特征、功能和/或性质的所有新颖的和非明显的组合和子组合。
[0071]
如本文所使用,除非另有指定,否则术语“约”被解释为表示所述范围的
±
5%。
[0072]
所附权利要求特别地指出被视为新颖的且非明显的某些组合和子组合。这些权利要求可指代“一个”要素或“第一”要素或其等同物。这些权利要求应理解为包括一个或多个此类要素的结合,既不要求也不排除两个或更多个此类要素。所公开特征、功能、元件和/或性质的其他组合和子组合可通过修正本权利要求或通过在此申请或相关申请中呈现新的权利要求来要求保护。此类权利要求与原始权利要求相比无论在范围上更宽、更窄、等同或不同,也都被视为包括在本公开的主题内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1