电动车辆、能量供应设备和能量供应系统的制作方法
1.本发明涉及电动车辆(electrically-powered vehicle)、能量供应设备和能量供应系统。
背景技术:
2.已知服务器向电力车辆(electric vehicle)提供包括关于充电站的位置、可用性和可接入性的信息的充电站信息的技术。充电站信息包括充电站与电力车辆之间的兼容性(例如,插头类型支持)作为可用性(例如,见第2014-212690号日本未审查专利申请公开(jp2014-212690a))。
技术实现要素:
3.包括充电站的能量供应设备与包括电力车辆的电动车辆之间的兼容性不仅是诸如插头类型的硬件兼容性,而且是诸如用于控制能量供应设备或电动车辆的程序的软件兼容性。
4.对于安装在诸如公共设施和商业设施的场所中的能量供应设备,当服务器经由例如有线通信向能量供应设备定期地提供最新软件时,能量供应设备可以被更新为最新状态。当服务器经由例如无线通信向电动车辆提供与最新软件具有兼容性的用于电动车辆的软件时,电动车辆可以从更新到最新状态的能量供应设备供应能量以补充能量。
5.然而,电动车辆的使用频率高的住宅等处安装的能量供应设备可能通过手动操作从服务器不定期地获取最新软件。当忘记获取最新软件时,设置有用于电动车辆的软件的电动车辆与安装在住宅等处的能量供应设备之间的支持关系将丢失,以及电动车辆可能不能从能量供应设备补充能量。
6.本发明提供避免在分别控制能量的供应和补充的两个软件之间的支持关系的丢失的电动车辆、能量供应设备和能量供应系统。
7.本发明的一方面涉及电动车辆。从供应能量的多个供应设备中的每个供应设备独立地补充能量的该电动车辆包括控制器。该控制器配置为,当与多个供应设备中的至少一个第一供应设备的第一控制软件相关联的电动车辆的车辆控制软件存储在能够与电动车辆通信的服务器中时,检查车辆控制软件与多个供应设备中的由电动车辆以比第一供应设备更高的频率使用的第二供应设备的第二控制软件之间的支持关系,以及当不存在支持关系时,限制经由与服务器的通信的车辆控制软件的接收或基于接收到车辆控制软件后的电动车辆的车辆控制软件的更新。
8.在上述配置中,控制器可以配置为,当存在支持关系时,执行经由与服务器的通信的车辆控制软件的接收以及基于接收到车辆控制软件后的电动车辆的车辆控制软件的更新。
9.在上述配置中,电动车辆还可以包括二次电池作为电源,并且多个供应设备可以配置为供应电力作为能量。
10.在上述配置中,电动车辆还可以包括燃料电池作为电源,并且燃料电池可以使用氢作为燃料,并且多个供应设备可以配置为供应氢作为能量。
11.在上述配置中,第一控制软件的版本可以比第二控制软件的版本更新。
12.本发明的另一方面涉及能量供应设备。该能量供应设备向电动车辆供应能量。该能量供应设备包括控制单元。该控制单元配置为,当配置为独立于能量供应设备向电动车辆供应能量并且由电动车辆以比能量供应设备更低的频率使用的不同能量供应设备的、比与电动车辆的车辆控制软件相关联的第一控制软件更新的能量供应设备的第二控制软件,存储在能够与能量供应设备通信的服务器中时,检查第二控制软件与车辆控制软件之间的支持关系,以及当不存在支持关系时,限制第二控制软件的接收或者基于接收到第二控制软件后的能量供应设备的第二控制软件的更新。
13.在上述配置中,控制器可以配置为:当存在支持关系时,执行第二控制软件的接收以及基于接收到第二控制软件后的能量供应设备的第二控制软件的更新。
14.本发明的又一方面涉及能量供应系统。该能量供应系统包括配置为供应能量的多个供应设备,配置为从多个供应设备中的每个供应设备独立地补充能量的电动车辆,以及能够与多个供应设备和电动车辆通信的服务器。电动车辆包括控制器。该控制器配置为,当与多个供应设备中的至少一个第一供应设备的第一控制软件相关联的电动车辆的车辆控制软件存储在服务器中时,检查车辆控制软件与多个供应设备中的由电动车辆以比第一供应设备更高的频率使用的第二供应设备的第二控制软件之间的支持关系,以及当不存在支持关系时,限制经由与服务器的通信的车辆控制软件的接收或基于接收到车辆控制软件后的电动车辆的车辆控制软件的更新。
15.在上述配置中,控制器可以配置为,当存在支持关系时,执行经由与服务器的通信的车辆控制软件的接收以及基于接收到车辆控制软件后的电动车辆的车辆控制软件的更新。
16.根据本发明的方面,能够避免在分别控制能量的供应和补充的两个软件之间的支持关系的丢失。
附图说明
17.下面将参考附图描述本发明的示例性实施例的特征、优点、以及技术和工业意义,在附图中相似的标记表示相似的元件,并且其中:图1是示意性地示出能量供应系统的整体配置的图;图2是示出电动车辆的配置的示例的图;图3是车辆管理服务器的硬件配置的示例;图4是车辆管理服务器的功能配置的示例;图5是车辆控制软件管理表的示例;图6a是第一支持表的示例;图6b是第二支持表的示例;图7是站管理服务器的功能配置的示例;图8是控制软件管理表的示例;图9a是第一充电站的配置的示例;
图9b是第二充电站的配置的示例;图10是示出根据第一实施例的能量供应系统的操作的示例的处理序列图(部分1);图11是示出根据第一实施例的能量供应系统的操作的示例的处理序列图(部分2);图12是示出根据第二实施例的能量供应系统的操作的示例的处理序列图(部分1);以及图13是示出根据第二实施例的能量供应系统的操作的示例的处理序列图(部分2)。
具体实施方式
18.在下文中,将参考附图描述本发明的实施例。第一实施例
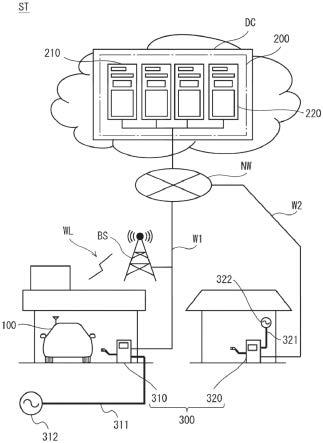
19.能量供应系统st包括电动车辆100、管理服务器组200以及多个充电站300。电动车辆100不配备有引擎,而配备有蓄电装置。电动车辆100是能够利用通过使用储存在蓄电装置中的电力的马达行驶的电力车辆。电动车辆100还包括插电式电力车辆(插电式ev)。电动车辆100可以是除了马达之外还配备有引擎的混合动力车辆,或者可以是代替蓄电装置或者除了蓄电装置之外还配备有使用氢作为燃料的燃料电池的燃料电池车辆。电动车辆100可以是私人拥有的车辆,或者可以是公司所拥有的公司拥有车辆。
20.管理服务器组200安装在提供云服务的数据中心dc中。管理服务器组200包括各种管理服务器,诸如车辆管理服务器210和站管理服务器220。充电站300包括第一充电站310和第二充电站320。虽然在图中未示出,但是除了第一充电站310和第二充电站320之外,充电站300包括多个第一充电站和多个第二充电站。每个充电站300是供应设备的示例。第一充电站310是第一供应设备和不同能量供应设备的示例。第二充电站320是第二供应设备和能量供应设备的示例。
21.车辆管理服务器210和站管理服务器220通过诸如局域网(local area network,lan)的有线通信网络彼此连接。车辆管理服务器210和站管理服务器220连接至通信网络nw。通信网络nw例如是因特网。
22.蜂窝基站bs连接至通信网络nw。当电动车辆100包括在蜂窝基站bs的无线通信区域内时,蜂窝基站bs能够经由无线通信wl与电动车辆100通信。蜂窝基站bs也可以被视为能够通过使用空中下载技术(over-the-air,ota)与电动车辆100通信。因此,电动车辆100经由通信网络nw、蜂窝基站bs和无线通信wl与车辆管理服务器210等通信。例如,诸如长期演进(long term evolution,lte)的广域无线通信的通信标准用于无线通信wl。
23.第一充电站310和第二充电站320连接至通信网络nw。第一充电站310例如是能够供应几十千瓦到几百千瓦的直流电力的快速充电站。第一充电站310安装在例如公共设施或商业设施的停车场中。第一充电站310经由与通信系统w1不同的电力系统311连接至200伏三相交流电源312。另一方面,第二充电站320例如是能够供应几千瓦的直流电力的标准充电站。第二充电站320安装在拥有电动车辆100的人的住宅车库中、或者拥有电动车辆100的公司的停车场中。第二充电站320经由与通信系统w2不同的电力系统321连接至100伏或
200伏单相交流电源322。以这种方式,由于第二充电站320安装在个人住宅车库或公司停车场中,所以第二充电站320的使用频率高于在行驶路线的中间临时使用的第一充电站310的使用频率。使用频率可以是每小时的使用次数,可以是每天的使用次数,可以是每月的使用次数,或者可以是每年的使用次数。
24.第一充电站310和第二充电站320各自彼此独立地向电动车辆100供应电力作为能量。当例如电动车辆100停放在安装第一充电站310的停车场中时,第一充电站310向电动车辆100供应电力。替代地,当电动车辆100停放在安装第二充电站320的车库中时,第二充电站320向电动车辆100供应电力。电动车辆100能够利用独立地从第一充电站310和第二充电站320中的每一者供应的电力进行充电。
25.将具体描述电动车辆100利用从第一充电站310供应的电力进行充电的情况。当电力从第一充电站310供应至电动车辆100时,设置在从第一充电站310延伸的充电电缆的末端(distal end)处的第一连接器连接至电动车辆100的第一入口。当在电动车辆100或第一充电站310中发出执行外部充电的指令时,电力从第一充电站310经由充电电缆供应至电动车辆100。因此,电动车辆100能够从第一充电站310进行电力补充和充电。电力从第二充电站320供应至电动车辆100的情况与第一充电站310的情况基本上相似,因此省略详细描述。
26.车辆管理服务器210通过通信网络nw、蜂窝基站bs和无线通信wl与电动车辆100通信。车辆管理服务器210例如从电动车辆100接收各种信息。车辆管理服务器210将用于控制电动车辆100的车辆控制软件(具体地,控制程序、固件等)发送至电动车辆100。车辆控制软件包括用于控制与电力的补充(即,充电)有关的操作的补充控制软件。另一方面,站管理服务器220通过通信网络nw与第一充电站310和第二充电站320通信。站管理服务器220从第一充电站310和第二充电站320接收各种信息。站管理服务器220将用于控制第一充电站310的控制软件发送至第一充电站310。类似地,站管理服务器220将用于控制第二充电站320的控制软件发送至第二充电站320。多个控制软件包括用于控制与电力的供应有关的操作的供应控制软件。
27.虽然稍后详细描述,但是站管理服务器220定期地将新版本(具体地,最新版本)控制软件统一地发送至第一充电站310。当第一充电站310接收新版本控制软件并且利用新版本控制软件更新时,第一充电站310处于最新状态。车辆管理服务器210与站管理服务器220的新版本控制软件的发送同步地将与该新版本控制软件具有兼容性的新版本车辆控制软件发送至电动车辆100。电动车辆100经由无线通信wl接收新版本车辆控制软件,并利用该新版本车辆控制软件进行更新。因此,电动车辆100处于最新状态。
28.另一方面,站管理服务器220响应于来自第二充电站320的请求而将新版本控制软件发送至第二充电站320。当例如使用第二充电站320的用户手动地操作第二充电站320以发出发送新版本控制软件的指令时,第二充电站320向站管理服务器220做出新版本控制软件的请求。当控制软件的定期发送需要高通信费用时,一些用户可以向第二充电站320设定基于手动操作的发送,而不设定动态定期发送。当第二充电站320做出新版本控制软件的发送的请求时,站管理服务器220将新版本控制软件发送至第二充电站320。第二充电站320接收新版本控制软件并且利用新版本控制软件进行更新。因此,第二充电站320处于最新状态。当第二充电站320处于最新状态时,第二充电站320与处于最新状态的电动车辆100具有兼容性,因此电动车辆100能够从第二充电站320补充电力。换言之,电动车辆100能够从第
二充电站320进行充电。
29.具有兼容性意味着多个软件之间存在支持关系,而不具有兼容性意味着多个软件之间不存在支持关系。对于与充电有关的兼容性,当控制软件和车辆控制软件之间存在支持关系时,对电力的输出控制和输入控制以及通信正常地操作。因此,例如,电动车辆100能够以最快的充电率进行充电。能够高精度地计算到充电完成的充电完成时间。除此以外,能够正常地显示发出外部充电指令的电动车辆100或第一充电站310的屏幕引导。因此,当控制软件和车辆控制软件之间不存在支持关系时,例如,充电速率可能降低,计算充电完成时间的精度可能降低,并且显示屏幕引导的精度可能降低。
30.将参考图2描述电动车辆100的配置。电动车辆100包括蓄电装置110、系统主继电器smr以及电力控制单元(power control unit,pcu)120。电动车辆100包括马达发电机(motor generator,mg)130、动力传动装置(power transmission gear)135、驱动轮140、第一入口150、第二入口152和充电继电器ry。电动车辆100包括电子控制单元(electronic control unit,ecu)160、数据通信模块(data communication module,dcm)170、全球定位系统(global positioning system,gps)接收器172、以及控制器局域网(controller area network,can)通信单元174。ecu 160包括中央处理单元(central processing unit,cpu)、随机存取存储器(random access memory,ram)、只读存储器(read only memory,rom)以及输入和输出接口(i/f)。
31.蓄电装置110是配置为可充电和可放电的电力储存元件。蓄电装置110是例如诸如锂离子电池和镍金属氢化物电池的二次电池、诸如双电层电容器的蓄电元件等。锂离子电池是使用锂作为载流子的二次电池。锂离子电池可以是电解质是液体的锂离子电池或者可以是电解质是固体的全固体电池。
32.蓄电装置110通过充电电缆由位于车辆外部并且连接至第一入口150的第一充电站310充电(外部充电)。蓄电装置110可以通过充电电缆由位于车辆外部并且连接至第二入口152的第二充电站320(见图1)充电(外部充电)。蓄电装置110在行驶期间通过pcu 120供应电力至mg 130。蓄电装置110在车辆制动中在mg 130的再生发电期间利用由mg 130通过pcu 120生成的电力充电。
33.系统主继电器smr设置在pcu 120与连接至蓄电装置110的一对电力线pl1、nl1之间。当车辆系统通过启动开关(未图示)等启动时,系统主继电器smr由ecu 160接通。
34.pcu 120是驱动mg 130的驱动单元,并且由诸如转换器和逆变器的电力转换装置构成。pcu 120由ecu 160控制并且将从蓄电装置110供应的直流电力转换为用于驱动mg 130的交流电力。pcu 120将由mg 130生成的交流电力转换为直流电力并将直流电力输出至蓄电装置110。
35.mg 130是交流旋转电机,并且例如是其中永磁体嵌设在转子中的三相交流同步电动机。mg 130由pcu 120驱动以生成旋转驱动力,并且由mg 130生成的驱动力通过动力传动装置135传递到驱动轮140。另一方面,例如,在车辆制动期间,mg 130操作为发电机并执行再生发电。由mg 130生成的电力通过pcu 120供应至蓄电装置110。
36.充电继电器ry设置在连接至第一入口150和第二入口152的一对电力线dcl1、dcl2与连接至该对电力线pl1、nl1的一对电力线pl2、nl2之间。在执行外部充电时,由ecu 160接通充电继电器ry。
37.第一入口150在外部充电期间接收从第一充电站310供应的电力。在外部充电期间,第一充电站310的第一连接器连接至第一入口150,并且从第一充电站310输出的直流电力通过第一入口150、一对电力线dcl1、dcl2、充电继电器ry、一对电力线pl2、nl2以及一对电力线pl1、nl1供应至蓄电装置110。
38.第二入口152在外部充电期间接收从第二充电站320(见图1)供应的电力。在外部充电期间,第二充电站320的第二连接器连接至第二入口152,并且从第二充电站320输出的直流电力通过第二入口152、一对电力线dcl1、dcl2、充电继电器ry、一对电力线pl2、nl2以及一对电力线pl1、nl1供应至蓄电装置110。
39.dcm 170是用于与车辆管理服务器210(见图1)通信的车载通信仪器。dcm 170能够通过无线通信wl、蜂窝基站bs和通信网络nw在电动车辆100(具体地,ecu 160)和车辆管理服务器210之间进行双向通信。gps接收器172基于来自人造卫星的无线电波确定当前位置,并将所确定的位置信息输出至ecu 160。由gps接收器172确定的位置信息用于例如导航系统(未图示)等。
40.can通信单元174在外部充电期间在电动车辆100(具体地,ecu 160)与第一充电站310或第二充电站320之间执行can通信。在本实施例中,描述了按照chademo(注册商标)模式执行dc充电的示例,并且还按照chademo中采用的can通信协议来执行电动车辆100与第一充电站310之间的通信。
41.根据本实施例的电动车辆100中能够采用的充电模式不限于chademo模式,并且例如也可以采用主要在欧洲和美国进行标准化的联合充电系统(combo)模式。另外,电动车辆100与第一充电站310或第二充电站320之间的通信不限于chademo模式中采用的can通信,并且可以通过电力线通信(power line communication,plc)或近场通信来执行。
42.当电动车辆100正在行驶时,通过接通系统主继电器smr并控制pcu 120,ecu160控制mg 130的驱动以及蓄电装置110的充电和放电。在外部充电期间,ecu 160通过接通充电继电器ry并且通过can通信单元174向第一充电站310或第二充电站320发送充电开始请求、充电电流命令值等,执行外部充电。ecu 160计算蓄电装置110的荷电状态(state of charge,soc)。当soc达到预定上限值时,ecu 160通过can通信单元174向第一充电站310或第二充电站320发送充电停止请求并断开充电继电器ry。至于计算soc的方法,可以使用已知的各种方法,诸如使用代表开路电压(open circuit voltage,ocv)与soc之间的关系的ocv-soc曲线(映射等)的方法、使用充电和放电电流的积分值、以及剩余容量/满充电容量
×
100的方法。
43.第一充电站310的充电电缆具有可连接至电动车辆100的第一入口150的第一连接器。在第一连接器连接至第一入口150的状态下,直流电力能够从第一充电站310供应至电动车辆100,以及能够在第一充电站310与电动车辆100之间执行can通信。第二充电站320基本上类似于第一充电站310,因此省略详细描述。
44.在第一充电站310的第一连接器连接至第一入口150的状态下,从电动车辆100发送至第一充电站310的数据包括例如充电开始请求、充电停止请求、充电电流命令值、充电电压上限等。要从第一充电站310向电动车辆100发送的数据包括,例如,最大输出信息(诸如可用电流值和可用电压值)、电流输出信息(诸如当前输出电流值和当前输出电压值)等。第二充电站320基本上类似于第一充电站310。
45.将参考图3描述车辆管理服务器210的硬件配置。站管理服务器220基本上具有与车辆管理服务器210类似的硬件配置,因此省略其描述。如图3所示,车辆管理服务器210包括用作处理器的cpu 210a、用作存储器的ram 210b和rom 210c、以及网络i/f 210d。必要时,车辆管理服务器210可以包括硬盘驱动器(hard disk drive,hdd)210e、输入i/f 210f、输出i/f 210g、输入和输出i/f 210h、以及驱动装置210i中的至少一者。cpu 210a、ram 210b、rom 210c、网络i/f 210d、hdd 210e、输入i/f 210f、输出i/f 210g、输入和输出i/f 210h以及驱动装置210i通过内部总线210j彼此连接。
46.输入装置710连接至输入i/f 210f。键盘或鼠标(未图示)是输入装置710的示例。显示装置720连接至输出i/f 210g。液晶显示器是显示装置720的示例。半导体存储器730连接至输入和输出i/f 210h。例如,通用串行总线(universal serial bus,usb)驱动器、闪存等是半导体存储器730的示例。输入和输出i/f 210h读出存储在半导体存储器730中的程序或数据。例如,输入i/f 210f以及输入和输出i/f 210h每一者包括usb端口。输出i/f 210g包括例如显示端口。
47.便携式记录介质740插入到驱动装置210i中。例如,诸如光盘(compact disc,cd)-rom和数字通用盘(digital versatile disc,dvd)的可移动盘是便携式记录介质740的示例。驱动装置210i读出存储在便携式记录介质740中的程序或数据。网络i/f 210d包括例如lan端口。网络i/f 210d连接至通信网络nw。
48.存储在rom 210c或hdd 210e中的程序通过cpu 210a临时地存储在ram 210b中。记录在便携式记录介质740上的程序通过cpu 210a临时地存储在ram 210b中。当cpu 210a运行存储的程序时,cpu 210a实现各种功能(稍后描述)并且执行各种处理(稍后描述)。程序只需要按照处理序列图(稍后描述)。
49.将参考图4至图6b描述车辆管理服务器210的功能配置。图4示出车辆管理服务器210的功能的主要部分。
50.如图4所示,车辆管理服务器210包括存储单元211、处理单元212、输入单元213、以及通信单元214。存储单元211由ram 210b、hdd 210e等实现。处理单元212由cpu 210a实现。输入单元213由输入i/f 210f实现。通信单元214由网络i/f 210d实现。因此,存储单元211、处理单元212、输入单元213和通信单元214彼此连接。
51.存储单元211包括车辆控制软件(在下文中,称之为sw)存储单元215和兼容性存储单元216作为组件。车辆控制sw存储单元215和兼容性存储单元216中的至少一者可以被设置在与车辆管理服务器210不同的另一管理服务器中。在这种情况下,车辆管理服务器210可以访问另一管理服务器并参考存储在车辆控制sw存储单元215和兼容性存储单元216中的细节。
52.车辆控制sw存储单元215将车辆控制软件存储在车辆控制软件管理表中。具体地,如图5所示,车辆控制sw存储单元215将车辆型号id、车辆控制软件、版本、发布日期等彼此相关联地存储。车辆型号id是用于识别电动车辆100的标识符。版本和发布日期分别是车辆控制软件的版本和可用日期。在第一实施例中,版本“v1”对应于车辆控制软件的旧版本,并且版本“v2”对应于车辆控制软件的新版本。
53.兼容性存储单元216存储关于电动车辆100与第一充电站310和第二充电站320中的每一者之间的兼容性的兼容性数据。具体地,如图6a和图6b所示,兼容性存储单元216通
过使用第一支持表和多个第二支持表来管理兼容性数据。
54.如图6a所示,第一支持表管理站型号id和车辆型号id的多个组合作为兼容性数据。站型号id是用于识别充电站300的标识符。在第一实施例中,站型号id“s1”被分配给第一充电站310,并且站型号id“s2”被分配给第二充电站320。站型号id和车辆型号id的组合通过使用第一支持表被唯一地识别。对电动车辆100的使用频率高的充电站300的站型号id设定预定标识符。预定标识符可以手动设定或者可以由计算使用频率的车辆控制sw管理单元217(稍后描述)动态设定。例如,为站型号id“s2”和车辆型号id“e1”的组合设定预定标识符“#”。因此,被分配了车辆型号id“e1”的电动车辆100能够唯一地识别使用频率高的第二充电站320。对于与电动车辆100不同的另一电动车辆(未图示),也同样地对使用频率高的充电站300的站型号id设定预定标识符。
55.如图6b所示,每个第二支持表管理被分配了站型号id的充电站300的控制软件的版本和被分配了车辆型号id的电动车辆100的车辆控制软件的版本之间的兼容性,作为站型号id和车辆型号id的每个组合的兼容性数据。兼容性“是”指示在控制软件与车辆控制软件之间存在兼容性。兼容性“否”指示在控制软件与车辆控制软件之间不存在兼容性。因此,这指示在被分配了站型号id“s2”的第二充电站320的控制软件的版本“v2”与被分配了车辆型号id“e1”的电动车辆100的车辆控制软件的版本“v1”之间不存在兼容性。通过第二支持表,可以唯一地识别控制软件的版本和车辆控制软件的版本之间的兼容性。
56.处理单元212包括车辆控制sw管理单元217。车辆控制sw管理单元217选择性地访问存储单元211的组件并执行各种处理。例如,当车辆控制sw管理单元217从电动车辆100接收到发送新版本车辆控制软件的请求时,车辆控制sw管理单元217将与电动车辆100的车辆型号id相关联的新版本车辆控制软件发送至电动车辆100。当描述能量供应系统st的操作时,将描述车辆控制sw管理单元217的细节。
57.将参考图7和图8描述站管理服务器220的功能配置。图7示出站管理服务器220的功能的主要部分。
58.如图7所示,站管理服务器220包括存储单元221、处理单元222、输入单元223和通信单元224。存储单元221由ram 210b、hdd 210e等实现。处理单元222由cpu 210a实现。输入单元223由输入i/f 210f实现。通信单元224由网络i/f 210d实现。因此,存储单元221、处理单元222、输入单元223和通信单元224彼此连接。
59.存储单元221包括站控制sw存储单元225和兼容性存储单元226作为组件。站控制sw存储单元225和兼容性存储单元226中的至少一者可以设置在与站管理服务器220不同的另一管理服务器中。在这种情况下,站管理服务器220可以访问另一管理服务器并参考存储在站控制sw存储单元225和兼容性存储单元226中的细节。
60.站控制sw存储单元225将用于控制充电站300的控制软件存储在控制软件管理表中。具体地,如图8所示,站控制sw存储单元225将站型号id、控制软件、版本、发布日期等彼此相关联地存储。版本和发布日期分别是控制软件的版本和可用日期。如在车辆控制软件的情况下,版本“v1”对应于控制软件的旧版本,并且版本“v2”对应于控制软件的新版本。兼容性存储单元226以及兼容性存储单元216存储兼容性数据。因此,省略兼容性存储单元226的详细描述。
61.处理单元222包括站控制sw管理单元227。站控制sw管理单元227选择性地访问存
储单元221的组件并执行各种处理。例如,当站控制sw管理单元227从第二充电站320接收到发送新版本控制软件的请求时,站控制sw管理单元227将与第二充电站320的站型号id相关联的新版本控制软件发送至第二充电站320。当描述能量供应系统st的操作时,将描述站控制sw管理单元227的细节。
62.将参考图9a描述第一充电站310的配置。第一充电站310包括ac-dc转换器315、高频逆变器316、升压变压器317、整流器318、以及第一充电控制器319。第一充电控制器319包括cpu、ram、rom、输入和输出i/f等。三相交流电源312经由电力系统311连接至ac-dc转换器315。一对第一电力线313的一端连接至整流器318。第一通信线314的一端连接至第一充电控制器319。第一连接器c1连接至一对第一电力线313的另一端和第一通信线314的另一端。第一连接器c1能够与电动车辆100的第一入口150连接。该对第一电力线313和第一通信线314是从第一充电站310延伸的充电电缆的一部分并且包括在充电电缆中。
63.ac-dc转换器315接收从三相交流电源312供应的电力并且将交流电力转换为直流电力。高频逆变器316将直流电力转换为高频(矩形波)交流电力以提高升压效率。升压变压器317使高频交流电力升压(step up)。整流器318对从高频交流电力升压的升压交流电力进行整流并平滑化,并且经由第一连接器c1输出直流电力。第一充电控制器319在与电动车辆100的ecu 160(见图2)交换诸如蓄电装置110的当前soc的信息的同时控制ac-dc转换器315和高频逆变器316的操作。
64.将参考图9b描述第二充电站320的配置。第二充电站320包括第一滤波器325、ac-dc转换器326、dc-dc转换器327、第二滤波器328以及第二充电控制器329。第二充电控制器329包括cpu、ram、rom、输入和输出i/f等。单相交流电源322经由电力系统321连接至第一滤波器325。一对第二电力线323的一端连接至第二滤波器328。第二通信线324的一端连接至第二充电控制器329。第二连接器c2连接至一对第二电力线323的另一端和第二通信线324的另一端。第二连接器c2能够与电动车辆100的第二入口152连接。该对第二电力线323和第二通信线324是从第二充电站320延伸的充电电缆的一部分并且包括在充电电缆中。
65.第一滤波器325在接收从单相交流电源322供应的电力的同时抑制来自单相交流电源322的噪声的流入和向单相交流电源322的噪声的流出。ac-dc转换器326将由第一滤波器325接收的交流电力转换为直流电力。dc-dc转换器327将从ac-dc转换器326输出的直流电力转换为具有不同电压的直流电力。第二滤波器328使直流电力平滑化并且经由第二连接器c2输出直流电力。第二充电控制器329在与电动车辆100的ecu 160(见图2)交换诸如蓄电装置110的当前soc的信息的同时,控制ac-dc转换器326和dc-dc转换器327的操作。
66.将参考图10和图11描述根据第一实施例的能量供应系统st的操作。在图10和图11中,通过字符“a”、字符“b”等代表处理的连续。
67.最初,如图10所示,站管理服务器220的站控制sw管理单元227等待,直到输入了用于控制第一充电站310的操作的控制软件的新版本(步骤s1中为否)。当输入了控制软件的新版本时(步骤s1中为是),站控制sw管理单元227将控制软件的新版本存储在站控制sw存储单元225中(步骤s2)。因此,当例如输入了用于第一充电站310的控制软件“s1控制程序”的新版本“v2”时,站控制sw存储单元225存储新版本“v2”(见图8)。
68.当站控制sw管理单元227存储控制软件的新版本时,站控制sw管理单元227将新版本动态地发送至第一充电站310(步骤s3)。在输入了控制软件的新版本后,站控制sw管理单
元227可以在存储新版本之前发送新版本,或者可以在存储新版本后发送新版本。站控制sw管理单元227可以基于预先确定的设定日期和时间、设定时间等发送控制软件的新版本。
69.当发送了控制软件的新版本时,第一充电站310的第一充电控制器319接收控制软件的新版本(步骤s4)。当第一充电控制器319接收到控制软件的新版本时,第一充电控制器319利用控制软件的新版本更新控制软件的旧版本(步骤s5)。当例如控制软件“s1控制程序”的旧版本“v1”安装在第一充电站310中时,第一充电控制器319利用控制软件“s1控制程序”的新版本“v2”更新旧版本“v1”。因此,第一充电控制器319处于最新状态。
70.另一方面,车辆管理服务器210的车辆控制sw管理单元217等待,直到输入了用于控制电动车辆100的操作的车辆控制软件的新版本(步骤s6中为否)。当输入了车辆控制软件的新版本时(步骤s6中为是),车辆控制sw管理单元217将车辆控制软件的新版本存储在车辆控制sw存储单元215中(步骤s7)。因此,当例如输入了电动车辆100的车辆控制软件“e1控制程序”的新版本“v2”时,车辆控制sw存储单元215存储新版本“v2”(见图5)。
71.在步骤s6和步骤s7的处理之前或之后,电动车辆100的ecu 160通过dcm 170与车辆控制sw管理单元217定期地检查车辆控制软件的新版本(步骤s8)。ecu 160等待,直到ecu 160确定存在车辆控制软件的新版本(步骤s9中为否)。当ecu 160确定存在车辆控制软件的新版本时(步骤s9中为是),ecu 160与车辆控制sw管理单元217检查兼容性(步骤s10)。更具体地,ecu 160检查车辆控制软件和用于控制第二充电站320的控制软件之间的兼容性。当ecu 160检查兼容性时,ecu 160将分配给ecu 160或dcm 170的车辆型号id发送至车辆控制sw管理单元217。
72.当从ecu 160请求车辆控制sw管理单元217检查兼容性时,车辆控制sw管理单元217将关于兼容性的通知提供至ecu 160(步骤s11)。更具体地,当请求车辆控制sw管理单元217检查兼容性时,车辆控制sw管理单元217访问第一支持表(见图6a)并且从与检查兼容性时发送的车辆型号id相关联的站型号id之中识别设定了预定标识符的站型号id。在本实施例中,发送车辆型号id“e1”,因此车辆控制sw管理单元217从站型号id“s1”、“s2”、
……
之中识别设定了预定标识符“#”的站型号id“s2”。当车辆控制sw管理单元217识别站型号id“s2”时,车辆控制sw管理单元217向站控制sw管理单元227请求安装在第二充电站320中的站型号id“s2”及其当前版本的控制软件。因此,站控制sw管理单元227访问控制软件管理表(见图8),并且向车辆控制sw管理单元217提供关于与站型号id相关联的控制软件及其当前版本的通知。在本实施方式中,站控制sw管理单元227将与站型号id“s2”相关联的控制软件“s2控制程序”及其当前版本“v1”的通知提供至车辆控制sw管理单元217。
73.当车辆控制sw管理单元217从站控制sw管理单元227接收关于控制软件及其当前版本的通知时,车辆控制sw管理单元217识别与车辆型号id和站型号id的组合相关联的第二支持表(见图6b)。当车辆控制sw管理单元217识别第二支持表时,车辆控制sw管理单元217基于所识别的第二支持表、由ecu 160在步骤s8和步骤s9的处理中检查和确定的用于车辆控制软件的更新的新版本、以及从站控制sw管理单元227提供通知的当前版本,将关于兼容性的通知提供至ecu 160。
74.参考图11,ecu 160基于来自车辆控制sw管理单元217的通知确定是否存在兼容性(步骤s12)。当例如提供了关于兼容性“否”的通知时,ecu 160确定不存在兼容性(步骤s12中为否)。在本实施例中,与站型号id“s2”相关联的控制软件“s2控制程序”在当前时间点是
版本“v1”,并且与车辆型号id“e1”相关联的车辆控制软件“e1控制程序”是新版本“v2”。因此,基于第二支持表(见图6b),两个软件之间不存在兼容性。因此,提供关于兼容性“否”的通知,并且ecu 160确定不存在兼容性。
75.当不存在兼容性时,ecu 160确定是否存在替代方案(步骤s13)。当不存在兼容性时,ecu 160可以限制(例如,取消或停止)后续处理。当例如ecu 160更新用于第二充电站320的控制软件作为替代方案时,ecu 160确定是否存在与车辆控制软件的新版本的兼容性。在这种情况下,ecu 160与车辆控制sw管理单元217检查替代方案,并且车辆控制sw管理单元217基于第二支持表向ecu 160提供关于替代方案的存在或不存在的通知。当不存在替代方案时(步骤s13中为否),ecu 160结束该处理。
76.另一方面,当存在替代方案时(步骤s13中为是),ecu 160请求车辆控制sw管理单元217发送用于第二充电站320的控制软件的新版本(步骤s14)。当从ecu 160请求车辆控制sw管理单元217发送新版本时,因为控制软件由站管理服务器220管理,所以车辆控制sw管理单元217请求站控制sw管理单元227发送新版本(步骤s15)。当在控制软件管理表中管理比新版本“v1”更新并且与站型号id“s2”相关联的另一新版本“v2”时,基于第二支持表确保兼容性。因此,站控制sw管理单元227将用于第二充电站320的该控制软件的新版本发送至第二充电站320的第二充电控制器329(步骤s16)。
77.当第二充电控制器329接收到从站控制sw管理单元227发送的控制软件的新版本时(步骤s17),第二充电控制器329基于接收到的控制软件的新版本更新控制软件(步骤s18)。换言之,第二充电站320通过站控制sw管理单元227被强制更新。因此,第二充电站320处于与电动车辆100具有兼容性的最新状态。
78.另一方面,当在步骤s12的处理中提供了关于兼容性“是”的通知时,ecu 160确定存在兼容性(步骤s12中为是)。当例如管理了针对第二支持表中的车辆型号id“e1”的版本“v2”和站型号id“s2”的版本“v1”的组合的兼容性“是”时(见图6b),提供关于兼容性“是”的通知。以这种方式,当存在兼容性时或者当步骤s14的处理完成时,ecu 160向车辆控制sw管理单元217请求车辆控制软件的新版本(步骤s19)。换言之,ecu 160允许车辆控制软件的新版本的接收以及基于所接收的车辆控制软件的更新。因此,车辆控制sw管理单元217将车辆控制软件的新版本发送至ecu 160(步骤s20)。在本实施例中,车辆控制sw管理单元217发送车辆控制软件“e1控制程序”的新版本“v2”。
79.当ecu 160接收从车辆控制sw管理单元217发送的车辆控制软件的新版本时(步骤s21),ecu 160基于所接收的车辆控制软件的新版本利用该新版本更新车辆控制软件的旧版本(步骤s22)。换言之,ecu 160执行更新。因此,电动车辆100处于与第一充电站310和第二充电站320两者都具有兼容性的最新状态。结果,能够避免用于控制电力供应的控制软件与用于控制电力的补充的车辆控制软件之间的兼容性的丢失。第二实施例
80.接着,将参考图12和图13描述根据第二实施例的能量供应系统st的操作。在图12和图13中,通过字符“p”、字符“q”等代表处理的连续。
81.最初,如图12所示,站管理服务器220的站控制sw管理单元227等待,直到输入了用于控制第二充电站320的操作的控制软件的新版本(步骤s31中为否)。当输入了控制软件的新版本时(步骤s31中为是),站控制sw管理单元227将控制软件的新版本存储在站控制sw存
储单元225中(步骤s32)。因此,当例如输入了用于第二充电站320的控制软件“s2控制程序”的新版本“v2”时,站控制sw存储单元225存储新版本“v2”。
82.另一方面,在步骤s31和步骤s32的处理之前或之后,第二充电站320的第二充电控制器329通过通信网络nw与站控制sw管理单元227定期地检查控制软件的新版本(步骤s33)。第二充电控制器329等待,直到存在控制软件的新版本(步骤s34中为否)。当第二充电控制器329确定存在控制软件的新版本时(步骤s34中为是),第二充电控制器329与站控制sw管理单元227检查兼容性(步骤s35)。更具体地,第二充电控制器329检查车辆控制软件和用于控制第二充电站320的控制软件之间的兼容性。当第二充电控制器329检查兼容性时,第二充电控制器329将分配给第二充电控制器329的站型号id发送至站控制sw管理单元227。
83.当从第二充电控制器329请求站控制sw管理单元227检查兼容性时,站控制sw管理单元227将关于兼容性的通知提供至第二充电控制器329(步骤s36)。更具体地,当请求站控制sw管理单元227检查兼容性时,站控制sw管理单元227访问与兼容性存储单元216类似地管理的兼容性存储单元226的第一支持表(见图6a),并且从与在检查兼容性时发送的站型号id相关联的车辆型号id之中识别设定了预定标识符的车辆型号id。在本实施例中,发送了站型号id“s2”,因此站控制sw管理单元227从车辆型号id“e1”、“e2”、
……
之中识别设定了预定标识符“#”的车辆型号id“e1”。当站控制sw管理单元227识别车辆型号id“e1”时,站控制sw管理单元227向车辆控制sw管理单元217请求安装在电动车辆100中的车辆型号id“e1”及其当前版本的车辆控制软件。因此,车辆控制sw管理单元217访问车辆控制软件管理表(见图5),并且向站控制sw管理单元227提供关于与车辆型号id相关联的车辆控制软件及其当前版本的通知。例如,车辆控制sw管理单元217将关于与车辆型号id“e1”相关联的车辆控制软件“e1控制程序”及其当前版本“v1”的通知提供至站控制sw管理单元227。
84.当站控制sw管理单元227从车辆控制sw管理单元217接收关于车辆控制软件及其当前版本的通知时,站控制sw管理单元227识别与站型号id和车辆型号id的组合相关联的兼容性存储单元226的第二支持表(见图6b)。当站控制sw管理单元227识别第二支持表时,站控制sw管理单元227基于所识别的第二支持表、由第二充电控制器329在步骤s33和步骤s34的处理中检查和确定的用于控制软件的更新的新版本、以及从车辆控制sw管理单元217提供通知的当前版本,将关于兼容性的通知提供至第二充电控制器329。
85.参考图13,第二充电控制器329基于来自站控制sw管理单元227的通知确定是否存在兼容性(步骤s37)。当例如提供了关于兼容性“否”的通知时,第二充电控制器329确定不存在兼容性(步骤s37中为否)。例如,与车辆型号id“e1”相关联的车辆控制软件“e1控制程序”在当前时间点是版本“v1”,并且用于与站型号id“s2”相关联的控制软件“s2控制程序”的更新的版本是版本“v2”。因此,基于第二支持表(见图6b),两个软件之间不存在兼容性。因此,提供关于兼容性“否”的通知,并且第二充电控制器329确定不存在兼容性。
86.当不存在兼容性时,第二充电控制器329确定是否存在替代方案(步骤s38)。当不存在兼容性时,第二充电控制器329可以限制(例如,取消或停止)后续处理。当例如第二充电控制器329更新用于电动车辆100的车辆控制软件作为替代方案时,第二充电控制器329确定是否存在与控制软件的新版本的兼容性。在这种情况下,第二充电控制器329与站控制sw管理单元227检查替代方案,并且站控制sw管理单元227基于第二支持表提供关于替代方
案的存在或不存在的通知给第二充电控制器329。当不存在替代方案时(步骤s38中为否),第二充电控制器329结束该处理。
87.另一方面,当存在替代方案时(步骤s38中为是),第二充电控制器329请求站控制sw管理单元227发送用于电动车辆100的车辆控制软件的新版本(步骤s39)。当从第二充电控制器329请求站控制sw管理单元227发送新版本时,因为车辆控制软件由车辆管理服务器210管理,所以站控制sw管理单元227请求车辆控制sw管理单元217发送新版本(步骤s40)。当在车辆控制软件管理表中管理比新版本“v1”更新并且与车辆型号id“e1”相关联的另一新版本“v2”时,基于第二支持表确保兼容性。因此,车辆控制sw管理单元217将用于电动车辆100的该车辆控制软件的新版本发送至电动车辆100的ecu 160(步骤s41)。
88.当ecu 160接收从车辆控制sw管理单元217发送的车辆控制软件的新版本时(步骤s42),ecu 160基于接收到的车辆控制软件的新版本更新车辆控制软件(步骤s43)。换言之,电动车辆100通过车辆控制sw管理单元217被强制性地更新。
89.另一方面,当在步骤s37的处理中提供了关于兼容性“是”的通知时,第二充电控制器329确定存在兼容性(步骤s37中为是)。当例如管理了针对第二支持表中的站型号id“s2”的版本“v2”和车辆型号id“e1”的版本“v1”的组合的兼容性“是”时(见图6b),提供关于兼容性“是”的通知。以这种方式,当存在兼容性时或者当步骤s39的处理完成时,第二充电控制器329向站控制sw管理单元227请求控制软件的新版本(步骤s44)。换言之,第二充电控制器329允许控制软件的新版本的接收以及基于所接收的控制软件的更新。因此,站控制sw管理单元227将控制软件的新版本发送至第二充电控制器329(步骤s45)。在本实施例中,站控制sw管理单元227发送控制软件“s2控制程序”的新版本“v2”。
90.当第二充电控制器329接收从站控制sw管理单元227发送的控制软件的新版本时(步骤s46),第二充电控制器329基于所接收的控制软件的新版本利用该新版本更新控制软件的旧版本(步骤s47)。换言之,第二充电控制器329执行更新。因此,第二充电站320处于与电动车辆100具有兼容性的最新状态。结果,能够避免用于控制电力供应的控制软件与用于控制电力补充的车辆控制软件之间的兼容性的丢失。
91.详细描述本发明的实施例;然而,本发明不限于上述特定实施例。在所附权利要求中描述的本发明的主旨的范围内,各种修改或变更是可应用的。
92.例如,在上述实施例中,第一充电站310被描述为第一供应设备和不同能量供应设备的示例,并且第二充电站320被描述为第二供应设备和能量供应设备的示例。替代性地,当电动车辆100为燃料电池车辆时,可以代替充电站300而采用供应氢作为能量的氢站。通过这样的实施例,能够避免用于控制氢供应的控制软件与用于控制氢补充的车辆控制软件之间的兼容性的丢失。
93.在第一实施例中,电动车辆100检查兼容性并且限制或执行车辆控制软件的更新等。替代性地,车辆管理服务器210可以执行类似处理。在第一实施例中,电动车辆100经由无线通信wl接收车辆控制程序。替代性地,电动车辆100例如可以经由诸如包括在从第二充电站320延伸的充电电缆中的第二通信线324的有线通信来接收车辆控制程序。
94.关于上述实施例,将描述以下补充说明。附录1
95.向从多个供应设备中的每个供应设备独立地补充能量的电动车辆供应能量的能
量供应方法包括:当与多个供应设备中的至少一个第一供应设备的第一控制软件相关联的电动车辆的车辆控制软件存储在能够与电动车辆通信的服务器中时,由电动车辆的控制器检查车辆控制软件与多个供应设备中的由电动车辆以比第一供应设备更高的频率使用的第二供应设备的第二控制软件之间的支持关系,并且,当不存在支持关系时,由控制器限制经由与服务器的通信的车辆控制软件的接收或基于接收到车辆控制软件后的电动车辆的车辆控制软件的更新。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1