车辆的制作方法
本发明涉及车辆。
背景技术:
以往,已知有与搭载于车辆并利用马达进行驱动的电动悬架装置相关的技术。例如,关于专利文献1中记载的电动悬架装置,根据法规,在规定的电压(例如,48v)以下的范围内尽量提高对向电动致动器的马达供给的电力进行变压的dc/dc转换器等变压器的输出电压(马达的驱动电压)。专利文献1:日本特开2012-131395号公报然而,在专利文献1所记载的电动悬架装置中,在使用三相交流无刷马达的情况下,三相交流部由于为交流30v以上而被分类为高电压。此外,为了在车辆碰撞时确保高电压的安全,需要确保交流部的安全,但是,专利文献1中并未对此进行记载。
技术实现要素:
本发明的的目的在于,提高搭载于车辆的电动悬架装置等的高电压部件的安全性。本发明的一个方式是车辆,该车辆具有:碰撞判定装置,其基于对车辆的外部进行检测的检测传感器的检测结果,判定有无碰撞的可能性;高电压部件;电源装置,其向所述高电压部件供给高电压;以及控制装置,其对所述电源装置和所述高电压部件进行控制,在所述碰撞判定装置判定为存在碰撞的可能性的情况下,所述控制装置限制所述高电压向所述高电压部件的供给。本发明的另一方式是在上述车辆中,在所述碰撞判定装置判定为存在碰撞的可能性的情况下,所述控制装置将向所述高电压部件供给的电压限制为规定电压以下。本发明的另一方式是在上述车辆中,所述高电压部件是在电动悬架装置中对电动致动器进行驱动的马达,所述控制装置在所述高电压对所述马达的供给被限制后,使所述马达短路。本发明的另一方式是在上述车辆中,所述控制装置在所述高电压向所述高电压部件的供给被限制后,在满足规定条件的情况下,解除所述高电压向所述高电压部件的供给的限制。本发明的另一方式是在上述车辆中,所述规定条件包含所述车辆以规定车速以上的车速行驶规定时间和所述车辆行驶规定距离中的至少一方。发明效果根据本发明,能够提高搭载于车辆的电动悬架装置等的高电压部件的安全性。
附图说明
图1是示出电动悬架装置的配置的一例的立体图。
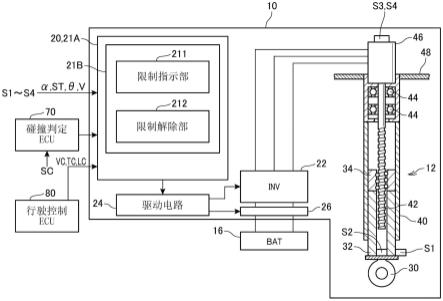
图2是示出电动悬架装置的结构的一例的图。图3是示出逆变器的结构的一例的图。图4是示出控制ecu的处理的一例的流程图。标号说明1
…
车辆;10
…
电动悬架装置;12
…
电动致动器;12a
…
第1电动致动器;12b
…
第2电动致动器;12c
…
第3电动致动器;12d
…
第4电动致动器;13
…
高电压线;131
…
第1高电压线;132
…
第2高电压线;133
…
第3高电压线;14
…
信号线;141
…
第1信号线;142
…
第2信号线;143
…
第3信号线;144
…
第4信号线;15
…
低电压线;16
…
电池(电源装置的一部);20
…
电动悬架控制ecu(控制装置);21a
…
存储器;21b
…
处理器;211
…
限制指示部;212
…
限制解除部;22
…
逆变器;22u1、22u2、22v1、22v2、22w1、22w2
…
mosfet;24
…
驱动电路;26
…
升压电路(电源装置的一部);30
…
连结部;32
…
内管;34
…
螺母;40
…
外管;42
…
丝杠轴;44
…
轴承;46
…
马达(高电压部件);50u、50v、50w
…
马达线圈;64u、64v、64w
…
电力线;70
…
碰撞判定ecu(碰撞判定装置);80
…
行驶控制ecu;bd
…
车体;s1
…
加速度传感器;s2
…
行程传感器;s3
…
旋转角传感器;s4
…
电压传感器;sc
…
检测传感器;st
…
行程;tr
…
车轮;v
…
电压;lc
…
行驶距离;lca
…
规定距离;vc
…
行驶速度;vca
…
规定速度;tc
…
行驶时间;tca
…
规定时间;α
…
加速度;θ
…
旋转角。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。[1.电动悬架装置的结构]图1是示出电动悬架装置10的配置的一例的立体图。图2是示出电动悬架装置10的结构的一例的图。参照图1和图2对电动悬架装置10进行说明。如图1所示,车辆1具有车体bd、4个车轮tr、电动悬架装置10、检测传感器sc。电动悬架装置10具有电动致动器12和电动悬架控制ecu20。电动致动器12由第1电动致动器12a、第2电动致动器12b、第3电动致动器12c和第4电动致动器12d构成。第1电动致动器12a配置于车体bd与右侧前轮之间。第2电动致动器12b配置于车体bd与左侧前轮之间。第3电动致动器12c配置于车体bd与右侧后轮之间。第4电动致动器12d配置于车体bd与左侧后轮之间。电动悬架控制ecu(electronic control unit)20对第1电动致动器12a~第4电动致动器12d分别进行控制。电动悬架控制ecu20通过高电压线13、信号线14和低电压线15而与第1电动致动器12a~第4电动致动器12d分别连接。高电压线13向第1电动致动器12a~第4电动致动器12d分别供给来自图2所示的电池16的高电压vh的电力。高电压vh的电力用于图2所示的马达46的驱动。高电压vh例如是交流33v~37v。信号线14将图2所示的传感器s1~传感器s4的检测信号向电动悬架控制ecu20传送。参照图2对传感器s1~传感器s4进行说明。低电压线15向第1电动致动器12a~第4电动致动器12d分别供给来自图2所示的电
池16的低电压vl的电力。低电压的电力用于图2所示的传感器s1~传感器s4的工作。低电压vl例如是直流5v。在以下的说明中,为了方便,有时将电动悬架控制ecu20记载为控制ecu20。检测传感器sc检测车辆1的外部。检测传感器sc包含雷达、摄像头、激光雷达(lidar:light detection and ranging)和超声波传感器中的至少1个。检测传感器sc检测车辆1的外部的障碍物、其他车辆、人体等。检测传感器sc的检测结果被传送到图2所示的碰撞判定ecu70。检测范围dr表示检测传感器sc对对象物进行检测的范围。第1电动致动器12a~第4电动致动器12d分别具有大致相同的结构,因此,以下在不对第1电动致动器12a~第4电动致动器12d分别进行区分的情况下,有时将第1电动致动器12a~第4电动致动器12d分别仅记载为电动致动器12。接着,参照图2对电动致动器12的结构进行说明。如图2所示,电动致动器12具有连结部30、内管32和螺母34作为车轮tr侧的构件。此外,电动致动器12具有外管40、丝杠轴42、轴承44和马达46作为车体bd侧的构件。外管40、轴承44和马达46被固定于在车体bd的下部配置的底架48。参照图3对马达46的结构进行说明。马达46对应于“高电压部件”的一例。丝杠轴42由轴承44和螺母34支承。螺母34的内表面经由轴承与在丝杠轴42的外表面形成的螺纹槽螺合。马达46使丝杠轴42转动,从而使螺母34沿上下方向移动。通过使螺母34向下移动而使内管32向下移动。通过使螺母34向上移动而使内管32向上移动。这样,能够调整内管32相对于外管40在上下方向的位置,其中,该外管40固定于车体bd的底架48。连结部30被固定于悬架装置的转向节(未图示),从而与车轮tr连结。当从车轮tr侧对连结部30输入振动并对连结部30例如施加向上的加速度α时,内管32和螺母34与外管40一体地上升。该情况下,马达46使丝杠轴42旋转,使得内管32向吸收向上的加速度α的方向,即向上移动,由此使从车轮tr向车体bd的振动衰减。在电动致动器12配置有加速度传感器s1、行程传感器s2、旋转角传感器s3、和电压传感器s4。加速度传感器s1例如固定于内管32的外周面,检测从车轮tr侧向连结部30施加的加速度α。行程传感器s2配置在内管32的与丝杠轴42对置的位置,检测行程st,该行程st表示螺母34的向下的移动量。行程传感器s2由测距传感器等构成。旋转角传感器s3由所谓的旋转变压器、霍尔元件等构成,检测马达46的旋转角θ。电压传感器s4检测向马达46施加的电压v。在通过来自电池16的电力而驱动马达46的状态下,电压v表示从电池16经由高电压线13而供给的高电压vh。加速度α、行程st、旋转角θ和电压v被输出到控制ecu20。[2.电动悬架控制ecu的结构]控制ecu20基于加速度传感器s1、行程传感器s2、旋转角传感器s3和电压传感器s4
的检测结果,经由逆变器22对马达46进行控制。参照图3对逆变器22的结构进行说明。控制ecu20具有存储器21a和处理器21b。存储器21a是非易失地存储由处理器21b执行的程序和数据的存储装置。存储器21a由磁存储装置、闪存rom(read only memory:只读存储器)等半导体存储元件、或其他种类的非易失性存储装置构成。此外,存储器21a也可以包含构成处理器21b的工作区的ram(random access memory:随机存取存储器)。存储器21a存储有控制ecu20处理的数据和由处理器21b执行的控制程序。电动悬架控制ecu20对应于“控制装置”的一例。处理器21b可以由单个处理器构成,也可以是由多个处理器作为处理器21b发挥功能的结构。处理器21b执行控制程序从而对电动悬架装置10的各部进行控制。控制ecu20具有限制指示部211、限制解除部212。具体而言,控制ecu20的处理器21b执行控制程序,由此作为限制指示部211和限制解除部212发挥功能。此外,控制ecu20以可通信的方式与碰撞判定ecu70和行驶控制ecu80连接。碰撞判定ecu70基于检测传感器sc的检测结果,判定车辆1有无碰撞的可能性。碰撞判定ecu70将车辆1有无碰撞的可能性的判定结果向控制ecu20输出。行驶控制ecu80控制车辆1的行驶。行驶控制ecu80将车辆1的行驶速度vc、车辆1的行驶时间tc和车辆1的行驶距离lc向控制ecu20输出。碰撞判定ecu70对应于“碰撞判定装置”的一例。限制指示部211根据碰撞判定ecu70的判定结果,限制高电压vh的电力向第1电动致动器12a~第4电动致动器12d各自的马达46的供给。具体而言,在碰撞判定ecu70判定为存在碰撞的可能性的情况下,限制指示部211执行以下的处理。即,限制指示部211例如将经由升压电路26向马达46供给的电压限制在规定电压va以下(包含停止向马达46供给的电力的情况)。规定电压va例如是20v~30v。参照图3进一步对升压电路26进行说明。此外,限制指示部211在限制了向马达46供给高电压vh的电力后,使第1电动致动器12a~第4电动致动器12d各自的马达46短路。具体而言,限制指示部211经由逆变器22停止向马达46供给电力,并且使马达46短路。参照图3对逆变器22的结构进行说明。在限制指示部211限制了向马达46供给的高电压vh后,在满足规定条件的情况下,限制解除部212解除第1电动致动器12a~第4电动致动器12d各自的马达46的短路。规定条件例如是表示碰撞的可能性已消除的条件。具体而言,规定条件例如是满足在向马达46供给的电压被限制为规定电压va以下后车辆1以规定车速vca以上的车速行驶了规定时间tca、和在向马达46供给的电压被限制为规定电压va以下后车辆1行驶了规定距离lca中的至少一方。在限制指示部211限制了向马达46供给高电压vh后,在满足规定条件的情况下,限制解除部212经由驱动电路24解除逆变器22的导通固定,从而解除第1电动致动器12a~第4电动致动器12d各自的马达46的短路。
此外,在限制指示部211限制了向马达46供给高电压vh后,在满足规定条的情况下,限制解除部212解除向第1电动致动器12a~第4电动致动器12d各自的马达46供给高电压vh的限制。具体而言,在满足车辆1以规定车速vca以上的车速行驶了规定时间tca和车辆1行驶了规定距离lca中的至少一方的情况下,限制解除部212经由升压电路26来解除向马达46供给高电压vh的限制。换言之,限制解除部212经由升压电路26将高电压vh供给到马达46。如图2和图3所示,升压电路26配置于电池16与逆变器22之间。升压电路26将从电池16供给的电压(例如,12v~16v)升压到高电压vh,将高电压vh供给到逆变器22。此外,升压电路26按照来自限制指示部211的指示,将向逆变器22供给的电压限制为规定电压va以下。此外,升压电路26按照来自限制解除部212的指示,使向逆变器22供给的电压从规定电压va以下返回到高电压vh。电池16和升压电路26对应于“电源装置”的一例。[3.逆变器的结构]控制ecu20经由驱动电路24对逆变器22进行控制。控制ecu20经由逆变器22对马达46的旋转方向和转速进行控制。此外,控制ecu20例如通过将逆变器22设为导通固定而使马达46短路。图3是示出逆变器22的结构的一例的图。如图3所示,逆变器22具有mosfet(metal-oxide-semiconductor field effect transistor:金属氧化物半导体场效应晶体管)22u1、mosfet22u2、mosfet22v1、mosfet22v2、mosfet22w1和mosfet22w2。这6个mosfet分别基于来自控制ecu20的指示而导通截止。马达46例如是三相交流无刷式,如图3所示,具有3个马达线圈50u、马达线圈50v和马达线圈50w。马达46通过从电池16经由逆变器22而被供给的电力,驱动图2所示的丝杠轴42旋转。控制ecu20的限制指示部211通过将逆变器22的低端侧的3个mosfet即mosfet22u2、mosfet22v2和mosfet22w2设为导通固定,从而使马达46短路。此外,控制ecu20的限制指示部211通过将逆变器22的高端侧的3个mosfet即mosfet22u1、mosfet22v1和mosfet22w1设为截止固定,从而停止从电池16向马达46供给电力。另外,限制指示部211也可以在将高端侧的3个mosfet设为截止固定后,将低端侧的3个mosfet设为导通固定。控制ecu20的限制解除部212通过解除逆变器22的低端侧的3个mosfet即mosfet22u2、mosfet22v2和mosfet22w2的导通固定,从而解除马达46的短路。此外,控制ecu20的限制解除部212通过解除逆变器22的高端侧的3个mosfet即mosfet22u1、mosfet22v1和mosfet22w1的截止固定,从而解除从电池16向马达46的电力供给的停止。另外,限制解除部212也可以在解除了低端侧的3个mosfet的导通固定后,解除高端侧的3个mosfet的截止固定。
[4.控制ecu的处理]图4是示出电动悬架控制ecu20的处理的一例的流程图。首先,在步骤s101中,限制指示部211基于碰撞判定ecu70的判定结果,判定是否存在碰撞的可能性。在限制指示部211判定为不存在碰撞的可能性的情况下(步骤s101;否),处理成为待机状态。在限制指示部211判定为存在碰撞的可能性的情况下(步骤s101;是),处理进入步骤s103。然后,在步骤s103中,限制指示部211将向第1电动致动器12a~第4电动致动器12d各自的马达46供给的电压限制为规定电压va以下(包含停止向马达46供给的电力的情况)。接着,在步骤s105中,限制指示部211使第1电动致动器12a~第4电动致动器12d各自的马达46短路。接着,在步骤s107中,限制解除部212在步骤s103中向马达46供给的电压被限制为规定电压va以下之后,判定是否车辆1以规定车速vca以上的车速行驶了规定时间tca。在限制解除部212判定为车辆1以规定车速vca以上的车速行驶了规定时间tca的情况下(步骤s107;是),处理进入步骤s111。在限制解除部212判定为车辆1未以规定车速vca以上的车速行驶规定时间tca的情况下(步骤s107;否),处理进入步骤s109。然后,在步骤s109中,在步骤s103中向马达46供给的电压被限制为规定电压va以下之后,限制解除部212判定是否车辆1行驶了规定距离lca。在限制解除部212判定为车辆1未行驶规定距离lca的情况下(步骤s109;否),处理返回步骤s107。在限制解除部212判定为车辆1行驶了规定距离lca的情况下(步骤s109;是),处理进入步骤s111。然后,在步骤s111中,限制解除部212解除第1电动致动器12a~第4电动致动器12d各自的马达46的短路。接着,在步骤s113中,限制解除部212解除向第1电动致动器12a~第4电动致动器12d各自的马达46供给高电压vh的限制。然后,处理结束。如参照图4说明的那样,在判定为存在碰撞的可能性的情况下,将向马达46供给的电压限制为规定电压va以下,因此能够提高马达46的安全性。此外,在判定为存在碰撞的可能性的情况下使马达46短路,因此能够使马达46产生再生电力,对马达46施加制动力。因此,能够限制构成电动悬架装置10的电动致动器12的动作。此外,在车辆1以规定车速vca以上的车速行驶了规定时间tca、或车辆1行驶了规定距离lca的情况下,能够估计为碰撞的可能性消除。于是,解除马达46的短路,解除向马达46供给高电压vh的限制。因此,能够通过电动致动器12使从车轮tr向车体bd的振动衰减。[5.结构和效果]如以上说明的那样,本实施方式的车辆1具有:碰撞判定ecu70,其基于对车辆1的外部进行检测的检测传感器sc的检测结果,判定有无碰撞的可能性;高电压部件(例如,马达46);向高电压部件供给高电压vh的电池16和升压电路26;以及电动悬架控制ecu20,其对升压电路26和高电压部件进行控制,在碰撞判定ecu70判定为存在碰撞的可能性的情况下,电动悬架控制ecu20限制高电压vh向高电压部件的供给。
根据该结构,在碰撞判定ecu70判定为存在碰撞的可能性的情况下,电动悬架控制ecu20限制高电压vh向高电压部件(例如,马达46)的供给,因此能够提高高电压部件的安全性。此外,在碰撞判定ecu70判定为存在碰撞的可能性的情况下,电动悬架控制ecu20将向高电压部件(例如,马达46)供给的电压限制为规定电压以下。根据该结构,在判定为存在碰撞的可能性的情况下,向高电压部件供给的电压被限制为规定电压以下,因此能够提高高电压部件(例如,马达46)的安全性。此外,高电压部件是在电动悬架装置10中对电动致动器12进行驱动的马达46,电动悬架控制ecu20在针对马达46的高电压vh的供给被限制后,使马达46短路。根据该结构,在判定为存在碰撞的可能性的情况下,在针对马达46的高电压vh的供给被限制后,马达46被短路,因此,能够使马达46产生再生电力,并对马达46施加制动力。因此,能够限制构成电动悬架装置10的电动致动器12的动作。此外,电动悬架控制ecu20在限制了向马达46供给高电压vh后,在满足规定条件的情况下,解除向马达46供给高电压vh的限制。根据该结构,能够通过适当设定规定条件,恰当地解除向马达46供给高电压vh的限制。规定条件例如是表示碰撞的可能性已消除的条件。
[0043]
此外,规定条件包含车辆1以规定车速vca以上的车速行驶规定时间tca和车辆1行驶规定距离lca中的至少一方。因此,能够适当设定规定条件。因此,能够恰当地解除向马达46供给高电压vh的限制。[6.其他实施方式]另外,本发明不限于上述实施方式的结构,能够在不脱离其主旨的范围内在各种方式下进行实施。例如,在上述实施方式中,对“高电压部件”是电动致动器12的情况进行了说明,但是不限于此。“高电压部件”例如也可以是轮毂马达、空调、行驶用马达和电动稳定器中的任意一个。此外,在上述实施方式中,对“电源装置”是电池16和升压电路26的情况进行了说明,但是不限于此。“电源装置”也可以是交流发电机等发电机。此外,在上述实施方式中,对经由升压电路26供给高电压vh的情况进行了说明,但是,也可以不使用升压电路26而从高电压vh的电池直接供给高电压vh。此外,也可以从高电压的电池经由降压电路供给高电压vh。此外,在上述实施方式中,对电动悬架装置10具有第1电动致动器12a~第4电动致动器12d的情况进行了说明,但是不限于此。例如也可以是如下方式,即,电动悬架装置10具有第3电动致动器12c和第4电动致动器12d,不具有第1电动致动器12a和第2电动致动器12b。相反,也可以是如下方式,即,电动悬架装置10具有第1电动致动器12a和第2电动致动器12b,不具有第3电动致动器12c和第4电动致动器12d。此外,在上述实施方式中,对电动致动器12具有加速度传感器s1、行程传感器s2、旋转角传感器s3和电压传感器s4的情况进行了说明,但是,也可以省略电压传感器s4。此外,在上述实施方式中,说明了限制指示部211将逆变器22的高端侧的3个
mosfet设为截止固定并将低端侧的3个mosfet设为导通固定从而使马达46短路的情况,但是不限于此。例如也可以是,电动悬架装置10具有使马达46短路的短路电路,限制指示部211经由短路电路使马达46短路。此外,在将向马达46供给的电压限制为规定电压va以下的状态下无法正常地继续电动致动器12的控制的情况下,如上述那样需要使马达46短路。然而,在将向马达46供给的电压限制为规定电压va以下的状态下能够正常地持续电动致动器12的控制的情况下,也可以不使马达46短路。图2所示的各功能块中的至少一部分构成为可以由硬件实现,也可以通过硬件和软件实现,不限定于图示那样配置独立的硬件资源的结构。电动悬架装置10的电动悬架控制ecu20的处理器21b执行的控制程序存储于存储器21a,但是,控制程序也可以存储于外接的hdd等。为了容易理解电动悬架装置10的电动悬架控制ecu20的处理,图4所示的流程图的处理单位是根据主要处理内容而分割的。实施方式不会被图4的流程图所示的处理单位的分割的方法、名称所限制。关于电动悬架控制ecu20的处理,可以根据处理内容而分割为更多的处理单位,还可以以1个处理单位包含更多的处理的方式进行分割。上述的流程图的处理顺序不限于图示的例子。通过使电动悬架控制ecu20的处理器21b执行与电动悬架控制ecu20的控制方法对应的控制程序,能够实现电动悬架控制ecu20的控制方法。控制程序可以预先记录于以能够由计算机读取的方式记录的记录介质中。记录介质能够使用磁记录介质、光学记录介质或半导体存储器设备。具体而言,可以举出软盘、cd-rom(compact disk read only memory)、dvd(digital versatile disc)、blu-ray(注册商标)disc、光磁盘、闪存、卡型记录介质等移动式或固定式的记录介质。记录介质可以是电动悬架装置10所具有的内部存储装置即ram、rom、hdd等非易失性存储装置。与电动悬架控制ecu20的控制方法对应的控制程序存储于服务器装置等,通过从服务器装置向电动悬架控制ecu20下载控制程序,从而实现电动悬架控制ecu20的控制方法。[7.上述实施方式所支持的结构]上述实施方式支持以下的结构。(结构1)一种车辆,其中,该车辆具有:碰撞判定装置,其基于对车辆的外部进行检测的检测传感器的检测结果,判定有无碰撞的可能性;高电压部件;电源装置,其向所述高电压部件供给高电压;以及控制装置,其对所述电源装置和所述高电压部件进行控制,在所述碰撞判定装置判定为存在碰撞的可能性的情况下,所述控制装置限制所述高电压向所述高电压部件的供给。根据结构1的车辆,在判定为存在碰撞的可能性的情况下,限制所述高电压向所述高电压部件的供给,因此能够提高所述高电压部件的安全性。(结构2)根据结构1所述的车辆,其中,在所述碰撞判定装置判定为存在碰撞的可能性的情况下,所述控制装置将向所述高电压部件供给的电压限制为规定电压以下。根据结构2的车辆,在判定为存在碰撞的可能性的情况下,将向所述高电压部件供给的电压限制为规定电压以下,因此能够提高所述高电压部件的安全性。(结构3)根据结构1或结构2所述的车辆,其中,所述高电压部件是在电动悬架装置
中对电动致动器进行驱动的马达,所述控制装置在所述高电压对所述马达的供给被限制后,使所述马达短路。根据结构3的车辆,所述高电压部件是在电动悬架装置中对电动致动器进行驱动的马达,在判定为存在碰撞的可能性的情况下,在所述高电压对所述马达的供给被限制后,所述马达被短路。因此,能够使所述马达产生再生电力,并对所述马达施加制动力。因此,能够限制构成电动悬架装置的电动致动器的动作。(结构4)根据结构1至3中的任意一项所述的车辆,其中,所述控制装置在限制了向所述高电压部件供给所述高电压后,在满足规定条件的情况下,解除所述高电压向所述高电压部件的供给的限制。根据结构4的车辆,在限制了向所述高电压部件供给所述高电压后,在满足规定条件的情况下,解除所述高电压向所述高电压部件的供给的限制,因此,通过适当设定规定条件,能够恰当地解除所述高电压向所述高电压部件的供给的限制。规定条件例如是表示碰撞的可能性已消除的条件(结构5)根据结构4所述的车辆,其中,所述规定条件包含所述车辆以规定车速以上的车速行驶规定时间和所述车辆行驶规定距离中的至少一方。根据结构5的车辆,所述规定条件包含所述车辆以规定车速以上的车速行驶规定时间和所述车辆行驶规定距离中的至少一方。在限制了所述高电压向所述高电压部件的供给后,在所述车辆以规定车速以上的车速行驶了规定时间的情况下,估计为碰撞的可能性已消除。此外,在限制了向所述高电压部件供给所述高电压后、所述车辆行驶了规定距离的情况下,判定为碰撞的可能性已消除。因此,能够恰当设定所述规定条件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1