具有可动态调整校准的交通工具侧向控制系统的制作方法
具有可动态调整校准的交通工具侧向控制系统
背景技术:
1.汽车工程师协会(sae)2级自动驾驶系统包括驾驶员辅助功能,该驾驶员辅助功能提供转向、制动、和加速辅助(例如,自动的车道改变和车道居中)。配备有2级自动化驾驶系统的交通工具在自动驾驶系统放弃控制的情况下,需要人类驾驶员准备就绪来接手对交通工具的控制。驾驶员辅助功能的出厂设置通常基于各种天气状况、道路状况和交通工具操作状况之间的折衷情况来进行校准。在交通工具操纵开发期间,校准工程师可在不同的天气和交通工具状态下操作交通工具,并选择平均满足整体交通工具操纵要求的一组校准值。然而,这组校准值可能不是针对特定驾驶状况的理想校准。一些驾驶员可能认为出厂设置的校准感觉不自然,对于天气状况或道路状况来说过于激进,或者对于他们的喜好来说不够激进。因此,一些驾驶员可能会停用自动驾驶模式,这可导致降低的交通工具安全性。
技术实现要素:
2.本文档描述了具有可动态调整校准的交通工具侧向控制系统的一个或多个方面。在一个示例中,该系统包括控制器电路,该控制器电路被配置成用于从一个或多个天气信息源接收由交通工具行驶的地理区域的天气数据。控制器电路从相机接收在地理区域中的由交通工具行驶的道路的图像数据。控制器电路从一个或多个交通工具传感器接收交通工具状态数据,该交通工具状态数据指示交通工具在地理区域中的道路上的操作状况。控制器电路基于天气数据、图像数据和交通工具状态数据中的一个或多个来调整一个或多个交通工具侧向控制功能的校准,以提高乘客舒适度或减少与车道中心线之间的误差。控制器电路基于经调整的校准,操作在道路上的交通工具。
3.在另一示例中,一种方法包括:使用控制器电路从一个或多个天气信息源接收由交通工具行驶的地理区域的天气数据;使用控制器电路从相机接收在地理区域中的由交通工具行驶的道路的图像数据;使用控制器电路接收来自一个或多个交通工具传感器的交通工具状态数据,该交通工具状态数据指示交通工具在地理区域中的道路上的操作状况;使用控制器电路,基于天气数据、图像数据和交通工具状态数据中的一个或多个,来调整一个或多个交通工具侧向控制功能的校准,以增加乘客舒适度或减少与车道中心线之间的误差;以及使用控制器电路,基于经调整的校准操作道路上的交通工具。
4.提供本发明内容以介绍具有可动态调整校准的交通工具侧向控制系统的各方面,该交通工具侧向控制系统在下面的具体实施方式和附图中被进一步描述。为了便于描述,本公开侧重于基于交通工具或基于汽车的系统,诸如集成在行驶于道路上的交通工具上的那些系统。然而,本文所述的技术和系统不限于交通工具或汽车情境,而且还适用于其中传感器可用于确定移动主体的动力学的其他环境。本发明内容并非旨在标识出要求保护的主题的必要特征,亦非旨在用于确定要求保护的主题的范围。
附图说明
5.参考以下附图在本文档中描述了具有可动态调整校准的交通工具侧向控制系统
的一个或多个方面的细节。贯穿附图使用相同的数字来引用相似的特征和部件:图1示出了根据本公开内容的技术的被示为安装在交通工具上的具有可动态调整校准的交通工具侧向控制系统的示例;图2示出了与图1的具有可动态调整校准的交通工具侧向控制系统的示例分离的示例天气信息源;图3示出了图1的具有可动态调整校准的交通工具侧向控制系统的交通工具传感器的示例;图4示出了根据本公开内容的技术的在道路上行驶的交通工具的交通工具侧向响应数据的示例;图5示出了根据本公开内容的技术的表示图4的交通工具的动态自行车模型的示例;图6示出了根据本公开内容的技术的示例侧向控制逻辑;图7示出了图1的具有可动态调整校准的交通工具侧向控制系统的使用相关联的经组合的属性的示例校准;图8示出了根据本公开内容的技术的选择侧向调节(lateral-tuning)参数的适当校准的示例;图9示出了根据本公开内容的技术的选择侧向调节参数的合适的校准的另一示例;图10示出了图1的具有可动态调整校准的交通工具侧向控制系统的示例逻辑流程;以及图11是操作图1的具有可动态调整校准的交通工具侧向控制系统的示例的示例方法。
具体实施方式
概述
6.本公开内容的技术涉及具有可动态调整校准的交通工具侧向控制系统。控制器电路接收来自天气源和安装于交通工具的相机的数据,所述数据指示由交通工具行驶的地理区域中的天气和道路状况。控制器电路还接收来自交通工具传感器的数据,所述数据指示了交通工具在行驶于地理区域中的道路上时的交通工具状态或当前操作状况。系统基于驾驶状况以及交通工具操作状况来调整对交通工具的侧向控制功能(例如,自动车道改变和车道居中)的校准。系统可使用经调整的侧向控制校准来以自主驾驶模式操作交通工具,并随着天气、道路状况、和交通工具操作状况沿着道路变化而动态地调整该校准。以这种方式,具有可动态调整参数的交通工具侧向控制系统可改进交通工具操纵,从而得到驾驶员或乘客舒适度,并且可减少当交通工具正以自主驾驶模式操作时在道路的车道内的交通工具位置的误差,这可以提高自主驾驶系统和半自主驾驶系统的公共感知,这是因为侧向控制系统使交通工具更准确地在道路上操作,从而得到改进的用户体验和操作安全性。示例系统
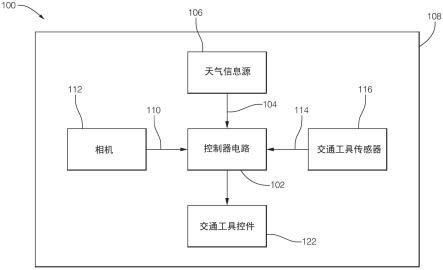
7.图1示出了具有可动态调整校准的交通工具侧向控制系统100(以下称为系统100)的示例。系统100包括控制器电路102,控制器电路102针对由交通工具108行驶的地理区域,
从一个或多个天气信息源106接收天气数据104。天气信息源106可以包括天气数据104的多个源,天气数据104由控制器电路102从外部源接收到或者由交通工具108上的传感器检测到,如将在下文中更详细描述的。
8.控制器电路102还从相机112接收在地理区域中的由交通工具108行驶的道路的图像数据110。相机112可以是被配置用于捕获道路的图像的任何相机112,诸如捕获红外光谱或可见光谱中的光的相机。相机112可以是另一交通工具系统的部件(例如,高级驾驶员辅助系统(adas)的部件),该部件能够检测车道标记、车道边界或交通工具108附近的对象。车道标记或车道边界可由控制器电路102使用以确定交通工具的路径或轨迹,如将在下文中更详细地解释的。在一些示例中,相机112可用作天气信息源106中的一个。相机112可以是捕获由交通工具108行驶的道路或在交通工具108附近的对象的图像的摄像机112。控制器电路102可以使用软件对图像中的对象进行分类以标识对象。
9.控制器电路102从一个或多个交通工具传感器116接收交通工具状态数据114,交通工具状态数据114指示交通工具108在地理区域中的道路上的操作状况。交通工具状态数据114可以包括对基于已知交通工具动态模型的交通工具动态响应具有重大影响的当前交通工具操作状况的数据,如将在下文中更详细地描述的。交通工具状态数据的示例包括交通工具质量、交通工具速度、轮胎压力、和交通工具偏航(yaw)。
10.控制器电路102可基于天气数据104、图像数据110或交通工具状态数据114来调整对一个或多个交通工具侧向控制功能118的校准,以在以自主驾驶模式操作交通工具时提高乘客舒适度或者减少与车道中心线之间的误差。交通工具侧向控制功能118的示例包括自动车道改变及车道保持功能。控制器电路102可以通过选择侧向调节参数120(侧向调节参数120可由交通工具控件122来解释)来调整对交通工具侧向控制功能118的校准,以控制交通工具108的转向、制动以及加速。所选择的侧向调节参数在与检测到的驾驶状况相关联时,可减少交通工具108的漂移或者侧向误差,或者可在系统100正将交通工具108控制至规划的轨迹时减少转向振荡。这可在操纵和舒适度得到改进时被观察到,从而可以改进在操作交通工具108时的安全性。
11.尽管交通工具108可以是任何交通工具,但是为了便于描述,交通工具108被主要描述为自动驾驶汽车,该自动驾驶汽车被配置成以用于辅助乘坐交通工具108的驾驶员的自主驾驶模式操作。交通工具108能够进行sae 2级自主操作(如背景技术中所指的),所述sae 2级自主操作辅助驾驶员转向、制动和加速,同时驾驶员始终在驾驶员的座椅处监测交通工具108的操作。
12.在图1所示的示例中,控制器电路102被安装在交通工具108上并且经由传输链路而通信耦合至天气信息源106、相机112、交通工具传感器116、以及交通工具控件122。传输链路可以是有线或无线接口,例如,近场通信(nfc)、通用串行总线(usb)、通用异步接收器/发射器(uart)、或控制器区域网(can)。在一些示例中,控制器电路102经由can总线(未示出)从其他交通工具系统(例如信息娱乐系统、导航系统、和轮胎压力管理系统(tpms))接收数据。控制器电路
13.具有可动态调整校准的交通工具侧向控制系统100的控制器电路102可被实现为微处理器或其他控制电路系统,诸如模拟和/或数字控制电路系统。控制电路系统可以包括
被编程以执行技术的一个或多个专用集成电路(asic)、现场可编程门阵列(fpga),或被编程以用于根据固件、存储器、其他存储或组合中的程序指令来执行技术的一个或多个通用硬件处理器。控制器电路102还可以将定制的硬接线逻辑、asic、或fpga与定制的编程进行组合,以执行技术。控制器电路102可以包括存储器或存储介质(未示出),包括非易失性存储器,诸如用于存储一个或多个例程、阈值、和所捕获的数据的电可擦除可编程只读存储器(eeprom)。eeprom存储数据并且允许通过应用编程信号来对各个字节进行擦除和重新编程。控制器电路102可以包括非易失性存储器的其他示例,诸如闪存、只读存储器(rom)、可编程只读存储器(prom)、以及可擦除可编程只读存储器(eprom)。控制器电路102可以包括易失性存储器(例如,动态随机存取存储器(dram)、静态随机存取存储器(sram))。控制器电路102可以包括用于同步控制电路系统或确定事件的经过时间的一个或多个时钟或计时器。一个或多个例程可以由处理器执行以执行用于基于由控制器电路102从天气信息源106、相机112、和交通工具传感器116接收到的信号来操作交通工具108的步骤,如本文所述。天气信息源
14.图2示出了远离系统100定位的天气信息源106的示例。天气信息源106可包括蜂窝网络106-1、卫星网络106-2、交通工具对基础设施(v2i)网络106-3、天气应用106-4、交通工具雷达传感器106-5、其他交通工具相机106-6、和相机112。
15.针对由交通工具108行驶的区域的实时或接近实时的天气信息可由控制器电路102经由蜂窝网络106-1或经由卫星网络106-2接收。控制器电路102可经由蜂窝接收器或卫星接收器下载区域天气数据104,蜂窝接收器或卫星接收器可以是交通工具108上的信息娱乐系统的部件。控制器电路102可以从天气服务(例如,美国的国家天气服务(nws)和欧洲中期天气预报中心(ecmwf)成员国的国家气象服务)下载天气数据。天气数据104可以是通常用于气象学中的一般规律分布二进制信息(general regularly-distributed information in binary;grib)文件的形式。已知的软件或移动应用可以由控制器电路102使用以解释grib文件并提取由系统100所使用的数据。
16.控制器电路102可以经由v2i网络106-3下载天气数据104,v2i网络106-3可以在其中部署有智能交通系统(its)的区域中可用。控制器电路102可以从收集在交通工具108附近的交通和天气状况的路边单元或节点无线地接收天气数据104。v2i通信可使用专用短程通信(dsrc),其具有5.9千兆赫兹(5.9ghz)频带的专用75兆赫(75mhz)段,或可使用利用了4g或5g移动蜂窝连接来发送和接收来自节点的信号的蜂窝v2x(c-v2x)。控制器电路102还可经由可使用dsrc通信协议的无线交通工具对交通工具(v2v)传输,从与交通工具108在同一区域行驶的其他交通工具接收天气数据104。
17.控制器电路102可经由移动天气应用106-4下载天气数据104,移动天气应用106-4提供广谱天气数据,例如,各种政府天气报告服务或私人天气报告服务。控制器电路102可以使用由这些报告服务主办的移动天气应用106-4,移动天气应用106-4提供针对由交通工具108行驶的区域的特定天气数据。控制器电路102可使用已知数据查询技术从天气应用106-4提取特定天气信息,例如,可用于调整对侧向控制功能的校准的风速及风向、温度或降水,如将在下文描述的。
18.通过使用滤波技术去除具有相对强的峰值的检测对象并保留由雨杂波(该雨杂波
可被视为背景噪声)所引起的信号分量,控制器电路102可使用交通工具雷达传感器106-5来检测交通工具108周围发生的降水。
19.作为一些示例,相机112可以是前向二维(2d)相机或3d飞行时间相机,3d飞行时间相机测量光脉冲离开相机并反射回到相机的成像阵列上的时间。可以使用生成2d或3d图像的其他类型的相机。在下雨、雨夹雪或下雪期间,相机112可以检测交通工具108周围发生的降水的类型,并且可以检测道路上的降水。在一些示例中,其他交通工具相机106-6(例如,安装在交通工具108外部的后向相机,用于向驾驶员提供交通工具108后方的视场,或者安装在侧视镜壳体和前格栅中的相机)可被用作天气数据104的源,其他交通工具相机106-6在一起使用时,可提供围绕交通工具108的360度视图。若相机112被安装在交通工具108内部,通过交通工具108的挡风玻璃具有道路的视图,则相机112可以基于雨滴的光度性质或光散射性质,来检测挡风玻璃上的雨滴,并且控制器电路102可使用已知的图像处理技术来标识雨滴。控制器电路102可使用基于纹理的图像处理的已知技术(例如,灰度共生矩阵(glcm)和局部二进制模式(lbp))以及已知的分类算法来检测雪形式的降水。
20.控制器电路102可使用机器学习来检测各种天气状况。机器学习是数据分析技术,其教导计算机从经验中学习。机器学习例程或算法使用计算方法从数据中学习信息,而不依赖于预先确定的方程作为模型。随着可用于学习的样本量的增加,例程提高了它们的性能。机器学习使用两种类型的技术:监督式学习,其在已知的输入和输出数据上训练模型,使得其能够预测未来的输出;以及无监督式学习,其发现输入数据中的隐藏模式(hidden pattern)或内在(intrinsic)结构。
21.监督式学习使用分类和回归技术来开发预测模型。用于执行分类的常用算法包括支持向量机(svm)、增强(boosted)和袋装(bagged)决策树、k-最近邻、朴素贝叶斯(bayes)、判别分析、逻辑回归和神经网络。常用回归算法包括线性模型、非线性模型、正则化、逐步回归、增强和袋装决策树、神经网络和自适应神经模糊学习。无监督式学习发现数据中的隐藏模式或内在结构,并用于从由没有标签响应的输入数据组成的数据集中得出推论。聚类(clustering)是常用的无监督式学习技术。用于执行聚类的常用算法包括k-均值和k-中心点法、层次聚类、高斯混合模型、隐马尔可夫(markov)模型、自组织映射、模糊c-均值聚类和减法聚类。在自动驾驶汽车的背景下,控制器电路102可以专门使用机器学习,以基于天气数据104确定可影响交通工具108的动态响应的降水的类型和大小,以确保控制器电路102可以准确地确定对交通工具侧向控制功能118的校准。
22.由控制器电路102从天气源106接收的天气数据104可以使得控制器电路102能够选择适合当前天气状况的校准。控制器电路102可以确定天气数据104的哪些属性对交通工具108的侧向稳定性有最大影响,并选择校准来提高转向性能。交通工具传感器
23.图3示出了远离系统100定位的交通工具传感器116的示例。交通工具传感器116生成由控制器电路102使用的交通工具状态数据114,以确定当前交通工具操作状况或交通工具状态。交通工具传感器116可包括轮胎压力传感器116-1、定位传感器116-2、交通工具速度传感器116-3、以及惯性测量单元(imu)116-4。
24.轮胎压力传感器116-1可以是直接轮胎压力传感器116-1或间接轮胎压力传感器116-1,并且可以是安装于交通工具108上的tpms的部件。直接轮胎压力传感器116-1包括位
于交通工具108的每个轮胎内部的压力换能器,该压力换能器将压力数据传输至tpms,该tpms经由can总线将压力数据报告给控制器电路102。间接轮胎压力传感器116-1使用基于软件的系统来确定轮胎压力,该基于软件的系统使用其他传感器信号(例如,车轮速度、加速度计、或者传动系数据),以估计和监测轮胎压力,而不在轮胎内安装物理压力传感器。
25.定位传感器116-2可以是全球导航卫星系统(gnss)。gnss指的是从空间传输信号的卫星星座,所述信号向位于交通工具108上的gnss接收器提供定位和定时数据。接收器随后使用该数据来确定交通工具108的位置。gnss在全球或区域基础上提供定位、导航和定时服务。gps、北斗、伽利略和glonass、irnss和qzss是分别由美国、中华人民共和国、欧盟、印度和日本操作的gnss的示例。
26.交通工具速度传感器116-3可以是旋转传感器(例如,车轮速度传感器),其中信号也可以用于操作交通工具108的速度计。交通工具速度传感器116-3还可使用来自gnss的数据,以基于交通工具108的位置变化来确定速度。
27.imu 116-4是检测交通工具108的相对运动的电子设备并且可以包括交通工具108的横摆角速度、纵向加速度、侧向加速度、俯仰角速度(pitch rate)以及滚动角速度(roll rate)。imu 114-1可以使用加速度计和陀螺仪的组合来检测交通工具的相对运动,并且可以是安装在交通工具108上的动态控制系统的部件。
28.以上描述的交通工具传感器116可向控制器电路102提供与交通工具108的侧向运动有关的交通工具状态数据,并可作为给交通工具动态模型的输入。交通工具侧向控制功能
29.交通工具侧向控制功能118可以包括自动车道改变控制和车道居中控制。控制器电路102可基于由天气数据104、图像数据110和交通工具状态数据114指示的变化驾驶状况,来调整对自动车道改变控制和车道居中控制的校准,并且以自主驾驶模式来操作交通工具108。调整校准以适应驾驶状况可改进交通工具的稳定性(尤其是在恶劣状况(例如,降雨覆盖的道路或者强横风)下操作时),这是由于校准值会影响交通工具的转向响应。
30.自动车道改变控制可由控制器电路102使用软件中的侧向控制器模块执行,该侧向控制器模块在车道改变期间规划并跟踪交通工具108的轨迹。对自动车道改变控制的校准可由控制器电路102提供给侧向控制器模块。模型预测控制器(mpc)是侧向控制器模块的示例,其可用于跟踪轨迹和交通工具稳定性,并在自动车道改变期间限制交通工具速度和转向角的变化的范围和速率。还可以使用mpc模块执行车道居中控制,以保持交通工具108在车道内的轨迹。mpc模块内的自动车道改变控制和车道居中控制的校准会影响可能受当前驾驶状况影响的车道改变行为和轨迹误差。虽然以下示例与mpc模块有关,但也可使用其他侧向控制器模块,例如,线性二次调节器(lqr)控制器或融合神经网络控制器。
31.参考mpc模块的示例,控制器电路102可以通过从控制器电路102的存储器中选择侧向调节参数124来调整针对自动车道改变控制和车道居中控制的校准,侧向调节参数124已经被确定为适合用于特定驾驶状况。本文中使用的术语“适当”与侧向调节参数有关,并且指的是在累积距离(例如驾驶超过100千米(km))内确定的合成平均侧向误差。当平均侧向误差小于交通工具108在100km距离内的规划轨迹十厘米(10cm)时,可认为校准是适当的。侧向调节参数可以在交通工具操纵开发过程期间针对多种天气、道路和交通工具状态被预先确定,并被存储于存储器中,用于在以后在类似状况下操作时由控制器电路102调
用。侧向调节参数124可以包括针对侧向位置误差124-1、侧向位置误差率124-2、航向(heading)误差124-3、航向误差率214-4和控制移动124-5的预定加权系数。如由mpc模块中使用的动态模型确定的,预定加权系数影响交通工具的动态控制。这些加权系数是在交通工具操纵开发期间被确定的(例如由校准工程师确定),并用于在不同的驾驶状况下创建到设定点的平滑转向轨迹。
32.图4示出了在道路的行驶车道中行驶的交通工具108。控制器电路102可基于由相机112捕获的车道标记的图像来确定行驶车道的中心线(例如,通过确定车道的宽度并且将中心线放置于车道的几何中心)。交通工具重心126(cg 126)被示出为针对交通工具108相对于车道的位置的参考点。交通工具航向128是cg126正移动的方向,并且车道航向130由控制器电路102基于与车道路径的切线或车道的曲率系数来确定,该车道的曲率系数是车道路径的曲率半径的倒数。车道的路径可由控制器电路102通过对车道标记或车道中心线应用多项式拟合来确定。侧向位置误差124-1是cg 126在车道中的实际位置与车道中心之间的差异,并且侧向位置误差率124-2是侧向位置误差124-1的变化速率。航向误差124-3是交通工具航向128和车道航向130之间的角度,并且航向误差率124-4是航向误差124-3的变化速率。控制移动124-5与mpc过程一起使用,并表示模型的一系列输入改变,使得所预测的响应以合适的方式移动到设定点。其他类型的侧向控制器模块可将控制移动124-5排除在校准之外。
33.前视距离(r)132是交通工具108预计将在未来出现的纵向范围,且是确定交通工具108的侧向偏移的因素。侧向偏移可由侧向控制器模块使用方程ao+(a1*r)+(a2*r2)+(a3*r3)来确定,其中ao是侧向位置误差124-1,a1是航向误差124-3,a2是路径的曲率,且a3是路径的曲率率。
34.mpc可以使用交通工具108的动态模型(例如,已知的自行车模型),来表示交通工具108相对于转向角的侧向动态响应。mpc可以使用自行车模型来预测交通工具108在自动车道改变和车道保持控制过程期间的未来响应。给动态模型的输入包括侧向调节参数,该侧向调节参数包括存储在控制器电路102的存储器中的上述预定加权系数。
35.图5示出了交通工具108跟随由自行车模型描绘的车道路径的示意图。自行车模型将每一个轮轴的两个车轮归并为在交通工具中心线处的一个车轮。从cg 126到车轮中心的距离由lf和lr指示,并且被交通工具制造商知道。转向角由符号δ表示,且交通工具108相对于车道路径的侧向位置误差124-1由符号e
cg
表示。交通工具航向128由符号θ表示,且车道航向130由符号θ
p
表示。交通工具的速度由符号v
x
表示。自行车模型可用于计算交通工具108相对于车道路径的侧向响应。然后,mpc可调整交通工具108的转向角,使得交通工具108跟随使用针对当前驾驶状况选择的侧向调节参数而针对自动车道改变所确定的车道路径或轨迹。数据属性
36.控制器电路102可确定天气数据104、图像数据110、和交通工具状态数据114的属性或特定特性,并基于属性对交通工具108的侧向控制的影响的大小,对属性进行等级排序。等级排序过程可基于实验数据预先确定。例如,与其他属性相比,风对交通工具动力学的影响最大,这是由于风对交通工具施加可影响侧向动力学的力。阳光或缺乏阳光可影响相机在不同距离处检测车道标记的能力。例如,阳光可使相机的成像器饱和,从而降低相机
检测车道标记的能力,或者夜间操作可导致与白天驾驶相比来说,减少对在距交通工具108较远的距离处的车道标记的检测。在另一示例中,当交通工具正在弯曲的道路上行驶时,与笔直道路相比,道路上的冰可能对交通工具动力学产生更大的影响。等级排序可以在交通工具开发过程期间经由实验来确定,或可以由控制器电路102使用机器学习例程来进行学习,如上文中描述的。下文中描述的属性的示例并不意味着是详尽无遗的,并且可取决于交通工具操纵要求以及控制器电路102的计算能力而变化。
37.与天气数据104相关联的属性的示例包括降水、温度、风向以及风速。降水和温度可影响道路与轮胎之间的摩擦系数,这可导致交通工具108的侧向运动或者横向(cross)滑移。温度还可指示道路上是否可形成冰。相对于交通工具航向128的风向可影响交通工具108的稳定性,并可由控制系统视为干扰或噪声因素,且风速是施加在交通工具108上的力的大小。
38.与图像数据110相关联的属性的示例包括车道宽度、道路曲率、和环境光量。车道宽度可用于确定车道中心线,并确定交通工具108应穿过以完成自动车道改变的侧向距离。道路曲率可用于确定自动车道改变期间的车道的路径或侧向偏移。如前所述,在阳光或黑暗中操作交通工具108可影响相机112对车道标记的检测。其他环境照明源(例如路灯)也可能影响对车道标记的检测。
39.与交通工具状态数据114相关联的属性的示例包括轮胎压力、交通工具质量、交通工具航向以及交通工具速度。轮胎压力可影响轮胎的刚度,轮胎的刚度影响交通工具108的侧向运动。轮胎的刚度可以是给自行车模型的输入。交通工具质量、航向和速度可影响交通工具108的动态响应,并且还可以是给自行车模型的输入。交通工具质量可以从车辆制造商的说明书中得知,或者可以基于交通工具108中的燃油油位和乘客数量来估计,该燃油油位和乘客数量可以由安装在交通工具108中的占用监测系统检测。
40.图6是流程图600,示出可由控制器电路102来执行以计算交通工具108的期望转向输出的控制逻辑的示例,。逻辑流程在602处开始于选择侧向调节参数,并且在610处结束于误差反馈。此示例中,在602处,控制器电路102基于输入数据属性从存储器中选择侧向调节参数120,侧向调节参数120被确定为适合当前的驾驶状况。侧向调节参数120被馈送到侧向控制器模块,在步骤604处,侧向控制器模块确定交通工具108的转向扭矩和转向角。
41.在606处,交通工具上的干扰(例如,风向和风速或路拱)被添加到来自侧向控制器模块的输出信号中,这可影响交通工具航向128。干扰可以是上文中针对天气数据104、图像数据110、和交通工具状态数据114描述的属性中的一个或多个。
42.在608处,包括转向致动器和相关联的传递函数的装置确定输出轨迹(y)以控制交通工具航向128,并且在610处,将输出轨迹添加至参考轨迹以确定馈送回到侧向控制器模块的误差。参考轨迹可以是针对自动车道改变而规划的路径,或者可以是针对车道保持控制而确定的当前车道路径。
43.控制器电路102可通过从控制器电路102的存储器中选择与一个或多个属性相关联的侧向调节参数124来调整校准。控制器电路102可从与多个天气状况、多个道路配置和多个交通工具状态相关联的查找表中访问侧向调节参数124。
44.控制器电路102可在存储器中存储属性的等级排序,其中对交通工具动力学具有最大影响的属性被分配最大优先级或重要性,其他属性的重要性按降序被分配。对于本公
开内容中所描述的示例,风被分配最大重要性,道路状况被分配次要重要性,并且环境照明被分配第三重要性。此等级排序可基于经验数据进行确定,并且可对于各种交通工具应用来说是不同的。
45.控制器电路102可基于对交通工具108的侧向控制具有最大影响的属性来调整校准。例如,当交通工具108在相对大风的时间段期间行驶时,控制器电路102可选择与从相对于交通工具航向128的特定方向进入的风相关联的侧向调节参数。在另一示例中,在交通工具108正以相对高的速度速率行驶时,控制器电路102可选择与高的交通工具速度相关联的侧向调节参数。
46.控制器电路102还可基于对属性的预定组合或混合(compound),来调整校准。例如,可由控制器电路102基于实际检测到的状况来选择针对来自天气数据104和图像数据110的特定属性的组合而优化的校准。图7示出了侧向调节校准的示例,该侧向调节校准将特定属性与通过实验而确定的经限定的等级排序相组合。本示例中,等级排序将风作为具有最大的重要性,将道路状况作为具有第二重要性,并且将环境照明作为具有第三重要性。将属性组合或分组到一起用于单独校准可得到更稳健的校准,这是由于属性可被视为给交通工具响应的噪声输入,并且所得到的适当的校准可对来自噪声输入的变化更具抵抗力或稳健性。
47.图8示出存储于存储器中的针对侧向调节的多个校准的示例。图8示出可能的校准的一部分,且不意味着是详尽的列举。在该示例中,校准被标记为从1到n,并与天气数据104的属性组合相关联,如图7中所示。例如,侧向调节1与东北风、道路上的冰以及直射日照相关联。控制器电路102可通过选择与具有最高等级的最可能属性相对应的侧向调节校准,来确定要被馈送到侧向控制器模块的最终最佳调节。
48.控制器电路102可使用软件中的概率评估模块(该概率评估模块将最高的加权系数分配给最可能的状况),评估要选择哪些侧向调节。在图8所示的示例中,由控制器电路102接收的天气数据104指示了东北风的80%概率和其他两个风向的10%概率与“侧向调节n-3”和“侧向调节n”相关联。控制器电路102选择与东北风相关联的“侧向调节1”,这是因为与其他风向相比来说,东北风具有最高的发生概率,并且因为风被视作最高等级属性。例如,若在由交通工具108行驶的区域中检测或预报无风,则控制器电路102将基于具有第二重要性的属性(该属性在本示例中是道路上的冰属性),来确定适当的调节校准。
49.图9示出其中控制器电路102基于概率方法选择侧向调节的另一个示例。控制器电路102可以使用软件中的概率评估,评估要选择哪些侧向调节。在图9所示的示例中,控制器电路102可以组合针对特定属性的所有数据源(例如,组合所有风数据源),并应用将置信度或信任水平分配给数据源的预定信任系数。可基于实验或用户偏好来确定预定的信任系数。控制器电路102可以确定合成概率pr,合成概率pr是信任系数、基于输入数据的属性概、率和属性的等级排序的函数。
50.使用天气数据104的两个源的示例,可确定合成概率,如下表1所示。
表1.调节校准的概率确定
51.最高合成概率p
r1
被确定为79%的北风和96%的阳光。次最高合成概率p
r2
被确定为21%的东北风和9%有云。返回参考图9,侧向调节被组合为针对“侧向调节1”79%和21%“侧向调节n-3”,用于产生被馈送到侧向控制器模块的最终的适当侧向调节。在本示例中,“侧向调节1”与北风方向相关联,且“侧向调节n-3”与东北风方向相关联。这些校准还可包括与图7所示的那些属性相似的混合属性,并且可因控制器电路给予风向的优先度,而针对风向选择这些校准。
52.图10示出用于从控制器电路102的存储器中选择校准值的由控制器电路102执行的示例逻辑流程。逻辑流程在1002处开始,其中确定属性的当前值,并在1008处结束,其中选择预定的加权系数。此示例中,在1002处,控制器电路102基于天气数据104、图像数据110和交通工具状态数据114确定属性的当前值。在1004处,控制器电路102将当前值与和存储在存储器中的预定加权系数的适当值相关联的属性进行比较。适当值是在各种天气、道路和交通工具状况下的交通工具试验期间确定的加权系数的预定值。如上文所描述,适当值表示交通工具在相关联的试验状况下的合适的侧向控制设置。例如,在干燥道路上,在有来自若干方向的风的情况下执行自动车道改变操纵,并且适当的加权系数被确定并被存储在存储器中并且与相应的风向相关联。
53.在1006处,控制器电路102确定当前值是否在与适当值相关联的属性的预定的范围内。针对每个属性建立预定范围,这是因为实际值可能与和适当值相关联的属性值不精准地匹配。例如,针对风向的预定的范围可以是用于建立相关联的适当值的风向(例如,北风方向)的正或负十五度。针对交通工具速度的预定的范围可以是用于建立相关联的适当值的交通工具速度的正或负五公里/小时。与适当值相关联的属性中的一些可能不具有预定的范围,例如,道路上存在或不存在冰。
54.若当前值不在与适当值相关联的属性的预定范围内,则控制器电路102保持当前校准并返回到1002。若当前值在与适当值相关联的属性的预定范围内,则在1008处,控制器
电路102选择要被馈送至侧向控制器模块(如图6中所示)的与存储于存储器中的属性相关联的预定加权系数。
55.为了防止系统100在校准之间快速变化(这可能会将噪声引入系统100或产生不稳定的转向输出或振荡),控制器电路102可利用经调整的校准操作交通工具108达超过阈值的时间(例如,在校准已经被调整后的十五分钟到六十分钟的范围内)。时间阈值可基于用户要求或驾驶状况而变化。例如,由控制器电路102选择用于在潮湿道路上操作交通工具108的校准可在系统100确定雨已经停止的时间之后保持达六十分钟。然后,控制器电路102可基于检测到的状况选择新的校准,并使用新的校准来操作交通工具108达超过阈值的时间。另一示例中,被选择用于在横风状况下操作交通工具108的校准可在系统100确定横风已减弱的时间后保持达十分钟。示例方法
56.图11示出了由系统100执行的示例方法1100。例如,控制器电路102通过执行与控制器电路102相关联的指令来配置系统100以执行操作1102到1110。执行操作(或步骤)1102到1110,但不一定限于本文中所示的操作所按照的顺序或组合。此外,一个或多个操作中的任何一个可以被重复、组合或重组以提供其他操作。
57.步骤1102包括“接收天气数据”。这可包括控制器电路102从天气信息源106接收针对由交通工具108行驶的地理区域的天气数据104。天气数据104的属性可以包括降水、温度、风向以及风速。天气信息源106可包括蜂窝网络106-1、卫星网络106-2、v2i网络106-3、天气应用106-4、交通工具雷达传感器106-5、其他交通工具相机106-6、和相机112。控制器电路102可使用已知数据查询技术,从天气数据104提取特定天气信息(例如风速及风向、温度或降水),所述特定天气信息可用于调整侧向控制功能的校准,如在上文所述。
58.步骤1104包括“接收图像数据”。这可包括控制器电路102接收由交通工具108行驶的道路的来自相机112的图像数据110。相机112可以是adas部件,该adas部件可以检测车道标记、车道边界或在交通工具108附近的对象,且控制器电路102可使用已知的软件技术来分类和标识图像中的对象。相机112还可用作天气信息源106中的一个,如上文中所述。
59.步骤1106包括“接收交通工具状态数据”。这可以包括控制器电路102从交通工具传感器116接收交通工具状态数据114,交通工具状态数据114指示交通工具108在道路上的操作状况,如上文中所述。交通工具状态数据114可以包括对基于已知交通工具动态模型的交通工具动态响应具有重大影响的当前交通工具操作状况的数据。交通工具状态数据114可包括交通工具108的轮胎压力、交通工具位置、交通工具速度和相对运动。
60.步骤1108包括“调整校准”。这可以包括控制器电流102调整交通工具侧向控制功能118的校准,交通工具侧向控制功能118包括自动车道改变和车道保持。控制器电路102基于天气数据104、图像数据110或交通工具状态数据114的属性来调整校准,以在以自主驾驶模式操作交通工具时提高乘客舒适度或者减少与车道中心线之间的误差,如上文所述。
61.控制器电路102可通过从控制器电路102的存储器中选择侧向调节参数124来调整针对自动车道改变控制和车道居中控制的校准,侧向调节参数124已被确定为适合于特定驾驶状况。侧向调节参数124可包括针对侧向位置误差124-1、侧向位置误差率124-2、航向误差124-3、航向误差率214-4和控制移动124-5的预定加权系数,如上文中所述。控制器电路102可基于属性对交通工具的侧向控制的影响的大小,对属性进行等级排序,如上文所
述。侧向调节参数124可基于单个属性或属性的组合来进行选择,如上文中所述。
62.控制器电路102可使用动态交通工具模型,基于属性的当前值来确定所预测的交通工具响应,并且可基于最大的所预测的交通工具响应来选择侧向调节参数124。控制器电路102可确定属性的当前值是否在与适当值相关联的属性的预定范围内,并基于属性的当前值来选择预定加权系数,如在上文中所述。
63.步骤1110包括“操作交通工具”。这可以包括控制器电路102基于经调整的校准,以自主驾驶模式操作交通工具108,如在上文中所述。控制器电路102可以基于第一经调整的校准来操作交通工具108达超过阈值的时间以抑制快速的校准变化,快速的校准变化可将误差引入系统100或产生不稳定转向。控制器电路102可以确定驾驶状况已经改变,并且选择与第一经调整的校准不相同的第二经调整的校准。控制器电路102可随后基于第二经调整的校准来操作交通工具108达超过阈值的时间,如在上文中所述。示例
64.在以下部分中,提供了示例。
65.示例1.一种系统,包括:控制器电路,该控制器电路被配置成用于:从一个或多个天气信息源接收针对由交通工具行驶的地理区域的天气数据;从相机接收在地理区域中的由交通工具行驶的道路的图像数据;从一个或多个交通工具传感器接收交通工具状态数据,该交通工具状态数据指示交通工具在地理区域中的道路上的操作状况;基于天气数据、图像数据和交通工具状态数据中的一个或多个,调整对一个或多个交通工具侧向控制功能的校准,以增加乘客舒适度或减少与车道中心线之间的误差;以及基于经调整的校准,操作道路上的交通工具。
66.示例2.前述示例的系统,其中控制器电路被进一步配置成用于:确定天气数据、图像数据和交通工具状态数据的一个或多个属性,并且基于属性对交通工具的侧向控制的影响的大小,对属性进行等级排序。
67.示例3.前述示例中的任一个的系统,其中控制器电路被进一步配置成用于:通过从控制器电路的存储器中选择与一个或多个属性相关联的侧向调节参数,来调整校准。
68.示例4.前述示例中的任一个的系统,其中天气数据的属性包括以下各项中的一个或多个:降水、温度、风向、和风速。
69.示例5.前述示例中的任一个的系统,其中图像数据的属性包括车道宽度和道路的曲率。
70.示例6.前述示例中的任一个的系统,其中交通工具状态数据的属性包括以下各项中的一个或多个:轮胎压力、交通工具质量、交通工具航向、和交通工具速度。
71.示例7.前述示例中的任一个的系统,其中控制器电路被进一步配置成用于:基于对侧向控制具有最大影响的属性来调整校准。
72.示例8.前述示例中的任一个的系统,其中控制器电路被进一步配置成用于基于属性的等级排序来调整校准。
73.示例9.前述示例中的任一个的系统,其中控制器电路被进一步配置成用于:基于来自查找表的与多个天气状况、多个道路、和多个交通工具状态相关联的值,来调整校准。
74.示例10.前述示例中的任一个的系统,其中一个或多个交通工具侧向控制功能包括自动车道改变控制和车道居中控制。
c-c、b-b、b-b-b、b-b-c、c-c、和c-c-c,或者a、b和c的任何其他排序)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1