一种自适应巡航系统中交通车并道场景下的车速控制方法
1.本发明涉及一种车速控制方法,特别涉及一种基于自适应巡航系统的交通车并道场景下的车速控制方法。
背景技术:
2.汽车自适应巡航系统(acc)利用汽车上安装的传感器探测主车与前方车辆的距离,根据二者之间的相对距离及设定车速,acc系统向制动系统和发动机控制系统发送指令,控制自车加速或减速,与前方车辆保持安全距离。目前的汽车自适应巡航系统主要关注自车与本车道前方车辆,即与跟车目标之间的距离控制,而对相邻车道的车辆缺少关注,相邻车道车辆向本车道并道时,当交通车的一半驶入本车道时,才将该车设为跟车目标,这就会导致自车反应滞后,为了将跟车距离及时增大到安全距离,就会发生突然制动的情况,甚至可能发生事故。而现有的一些提前考虑交通车并道情况的控制方法,在判断车辆干涉情况时没有考虑具体的侧向碰撞、追尾等碰撞形式,对相邻车道上向本车道并道的交通车缺乏预先反应,对碰撞时间的预测精度有待改进;在进行车速控制时,大多一味采取保守的减速措施,对通行效率造成影响。
3.现有的一些关注旁车道车辆并线的自适应巡航控制方法仍存在以下问题:没有考虑并线车辆的具体轨迹,也不考虑可能的碰撞形式,精度上有待改进;或者判断两车是否发生干涉时车辆的几何模型被假设为一个点,没有考虑到实际体积,在碰撞判别中对车辆自身体积和形状考虑不足,无法充分考虑车辆之间可能的干涉形式。
技术实现要素:
4.本发明为了解决现有的自适应巡航系统中存在的上述技术问题,提供一种基于自适应巡航系统的交通车并道场景下的车速控制方法,包括以下步骤:
5.第一步、采集自车及相邻交通车的运动学信息:包括自车的速度、加速度、横摆角速度,相邻交通车相对自车的横向距离、纵向距离、航向角、横摆角速度、纵向速度、横向速度等;
6.第二步、识别相邻车道交通车的并道意图:进行相邻车道交通车的左换道、右换道或车道保持意图辨识,将具有向本车道并道意图的交通车标记为并道交通车;
7.第三步、预测并道交通车和自车的离散轨迹:
8.预测并道交通车未来δt时间内的并道离散轨迹:采样频率为f,得到长度为δt
×
f的并道离散轨迹序列,包含未来δt时间内并道交通车的位置、速度和朝向角信息,并转换至当前时刻的自车坐标系下;
9.预测自车未来δt时间内的离散轨迹:采样频率为f,即得到长度为δt
×
f的轨迹序列,包含未来δt时间内自车相对当前时刻的纵向位置、横向位置、车速、朝向角信息;
10.第四步、碰撞时间计算:
11.短时碰撞时间计算:遍历法对预测的离散轨迹序列进行自车与并道交通车的矩形
框重合检测,记录首次发生重合的轨迹点对应的时刻为碰撞时间ttc;
12.若矩形框重合检测中,预测轨迹范围内没有发生重合,则建立匀速模型,进行进一步的长时碰撞时间计算和碰撞情形判别;
13.第五步、根据第四步计算得到的碰撞时间ttc和碰撞情形,计算自车的期望加速度;
14.第六步、汽车自适应巡航系统与制动系统及驱动系统通信,使其产生合适的制动压力或发动机输出功率,控制车辆以期望加速度行驶至自适应巡航系统跟驰目标切换为并道交通车或与当前车道前车的纵向距离小于等于跟车距离thvh。
15.进一步的,第四步所述的矩形框重合检测,包括以下步骤:
16.步骤1、通过坐标系转换,分别计算自车矩形框的四个角点相对同一时刻并道交通车轨迹点的坐标(x
corner
,y
corner
)
fl,fr,rl,rr
;
17.步骤2、将自车的角点坐标(x
corner
,y
corner
)
fl,fr,rl,rr
与并道交通车矩形框的长l
t
、宽w
t
相比较,判断自车矩形框是否有角点与并道交通车发生干涉,若某一角点满足且表示该角点与交通车发生碰撞;
18.步骤3、通过坐标系转换,分别计算并道交通车矩形框的四个角点相对同一时刻自车轨迹点的坐标(x'
corner
,y'
corner
)
fl,fr,rl,rr
;
19.步骤4、将并道交通车的角点坐标(x'
corner
,y'
corner
)
fl,fr,rl,rr
与自车矩形框的长lh、宽wh相比较,判断并道交通车矩形框是否有角点与自车发生干涉,若某一角点满足且表示该角点与自车发生碰撞;
20.步骤5、参照步骤1~步骤4,用遍历法对预测轨迹序列的矩形框重合情况进行检测,最先检测到矩形框重合的预测轨迹序列索引为k
collision
,碰撞时间记为ttc=k
collision
/f,ttc≤δt。
21.进一步的,第四步所述的长时碰撞时间计算和碰撞情形判别,包括以下步骤:
22.步骤1、提取轨迹预测最末时刻k=δt
×
f时,自车与并道交通车的位置、速度和朝向角信息;
23.步骤2、假设二者自此保持匀速直线行驶,为k=δt
×
f时刻并道交通车相对同一时刻自车的航向角,v
xk
为k=δt
×
f时刻并道交通车与自车的纵向相对速度,ε表示车辆直线行驶时航向角的正常波动范围,若碰撞情形及碰撞时间计算如下:
24.碰撞情形〇:
[0025][0026]
若v
xk
<0,执行步骤3、4、5;
[0027]
步骤3、v
xk
<0时,计算纵向碰撞时间ttc
x
和侧向碰撞时间ttcy;纵侧向碰撞时间计算方法如下式所示:
[0028][0029][0030][0031][0032][0033][0034][0035]
上式中,xk、yk、v
xk
、v
yk
分别为k=δt
×
f时刻并道交通车与自车的纵向相对距离、横向相对距离、纵向相对速度、横向相对速度,横向相对距离、纵向相对速度、横向相对速度,
[0036]
步骤4、同组纵侧向碰撞时间相比较,确定碰撞情形,方法如下:
[0037]
若ttc
x,1
≥ttc
y,1
,则为碰撞情形ⅰ,表示自车头部与并道交通车尾部车角发生边对角碰撞;
[0038]
若ttc
x,2
≥ttc
y,2
&ttc
x,1
<ttc
y,1
,则为碰撞情形ⅱ,表示自车头部车角与并道交通车侧边发生角对边碰撞;
[0039]
若ttc
x,3
≥ttc
y,3
&ttc
x,2
<ttc
y,2
,则为碰撞情形ⅲ,表示并道交通车头部车角与自车侧边发生角对边碰撞;
[0040]
若ttc
x,4
≥ttc
y,4
&ttc
x,3
<ttc
y,3
,则为碰撞情形ⅳ,表示并道交通车头部与自车尾部车角发生边对角碰撞;
[0041]
步骤5、根据确定的碰撞情形,计算相应的碰撞时间ttc,计算公式如下:
[0042]
碰撞情形ⅰ:
[0043][0044]
碰撞情形ⅱ:
[0045]
[0046]
碰撞情形ⅲ:
[0047][0048]
碰撞情形ⅳ:
[0049][0050]
进一步的,第五步中计算自车的期望加速度方法如下:
[0051]
步骤1、若ttc≤δt或所判断的碰撞情形为〇、ⅰ或ⅱ,则自车期望制动减速度为:
[0052][0053]
步骤2、若所判断的碰撞情形为ⅲ或ⅳ,当前车道无前车,或与当前车道前车的纵向距离x
follow
≥1.2thvh,则自车期望加速度为:
[0054][0055]
步骤3、若所判断的碰撞情形为ⅲ或ⅳ,当前车道有前车,且与当前车道前车的纵向距离x
follow
<1.2thvh,则自车期望制动减速度同步骤1;
[0056]
其中,步骤1~3中的a
bmax
、a
amax
分别为自车能达到的最大制动加速度和最大加速度,vh为当前时刻自车车速,th为汽车自适应巡航系统设定的跟车时距。
[0057]
本发明的有益效果:
[0058]
相比现有技术,本发明充分考虑了交通车并道意图和自车及并道交通车未来可能的具体行驶轨迹,通过矩形框重合检测,考虑车辆实际大小,大幅提高了对短时间内碰撞的预测精度;进一步地,通过考虑车辆实际大小进行长时碰撞时间计算和碰撞情形判别,增强对长时间内交通态势的预测能力;现有技术大多面临交通车并道工况都会执行不同程度的制动动作,而本发明根据碰撞时间和碰撞情形计算期望的自车加速度,控制车辆进行制动以提前拉开跟驰车距,规避碰撞风险,或加速以规避碰撞风险并提高通行效率。
附图说明
[0059]
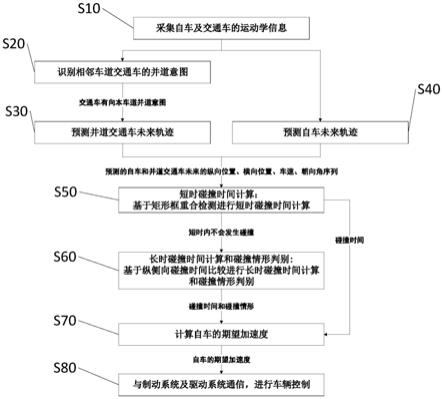
图1为本发明的整体流程图。
[0060]
图2为本发明针对工况的示意图。
[0061]
图3为本发明所述短时碰撞时间和矩形框重合检测计算示意图。
[0062]
图4为本发明所述短时碰撞时间和矩形框重合检测计算流程示意图。
[0063]
图5为本发明所述长时碰撞时间计算和碰撞情形判别中4种碰撞情形示意图。
[0064]
图6为本发明所述长时碰撞时间计算和碰撞情形判别流程示意图。
[0065]
图7为本发明所述自车期望加速度计算流程示意图。
[0066]
图中的标注如下:
[0067]
1、自车,2、并道交通车,3、当前车道前车,4、自车矩形框的四个角点,5、并道交通车矩形框的四个角点。
具体实施方式
[0068]
请参阅图1-7所示:
[0069]
本发明提供一种基于自适应巡航系统的交通车并道场景下的车速控制方法,包括以下步骤:
[0070]
s10、采集自车1及相邻交通车的运动学信息:包括自车1的速度、加速度、横摆角速度,相邻交通车相对自车的横向距离、纵向距离、航向角、横摆角速度、纵向速度、横向速度等。
[0071]
s20、识别相邻车道交通车的并道意图:方法为:利用公开的自然驾驶数据集中的车辆左换道、右换道和车道保持数据,训练隐马尔科夫模型,进行相邻车道交通车的左换道、右换道或车道保持意图辨识;将具有向本车道并道意图的交通车标记为并道交通车2。
[0072]
s30、预测并道交通车2未来δt时间内的并道离散轨迹:轨迹点为对应时刻车辆几何中心所在位置,采样频率为f,得到长度为δt
×
f的轨迹序列,包含未来δt时间内并道交通车2的位置、速度和朝向角信息,并转换至当前时刻的自车坐标系下。轨迹预测方法为:利用公开的自然驾驶数据集中的车辆换道数据,提取车辆左换道、右换道时的轨迹片段,采用神经网络分别训练左换道、右换道的车辆换道轨迹预测模型,预测时长为δt,得到交通车2的并道离散轨迹序列。
[0073]
s40、预测自车1未来δt时间内的离散轨迹:轨迹点为对应时刻车辆几何中心所在位置,采样频率为f,即得到长度为δt
×
f的轨迹序列,包含未来δt时间内自车1相对当前时刻的纵向位置、横向位置、车速、朝向角信息。方法为:根据当前时刻自车1的纵向速度和横摆角速度,采用恒定转率和速度模型进行自车1的未来轨迹预测,状态转移方程为:
[0074][0075]
式中状态量xk表示k时刻自车相对当前时刻的纵向位置,yk表示k时刻自车相对当前时刻的横向位置,vk表示k时刻自车的速度,表示k时刻自车相对当前时刻的航向角,表示k时刻自车的角速度;δt为采样步长。
[0076]
s50、短时碰撞时间计算:遍历法对预测的离散轨迹序列进行自车1与并道交通车2的矩形框重合检测,记录首次发生重合的轨迹点对应的时刻为碰撞时间ttc。所述的矩形框重合检测,参阅图1、图3和图4所示,包括以下步骤:
[0077]
s51、通过坐标系转换,分别计算自车1矩形框的四个角点相对同一时刻并道交通车2轨迹点的坐标(x
corner
,y
corner
)
fl,fr,rl,rr
;
[0078]
s52、将自车的角点坐标(x
corner
,y
corner
)
fl,fr,rl,rr
与并道交通车矩形框的长l
t
、宽w
t
相比较,判断自车1矩形框是否有角点与并道交通车2发生干涉,若某一角点满足
且表示该角点与交通车发生碰撞;
[0079]
s53、通过坐标系转换,分别计算并道交通车2矩形框的四个角点相对同一时刻自车1轨迹点的坐标(x'
corner
,y'
corner
)
fl,fr,rl,rr
;
[0080]
s54、将并道交通车2的角点坐标(x'
corner
,y'
corner
)
fl,fr,rl,rr
与自车1矩形框的长lh、宽wh相比较,判断并道交通车2矩形框是否有角点与自车1发生干涉,若某一角点满足且表示该角点与自车发生碰撞;
[0081]
s55、参照s51~s54,用遍历法对预测轨迹序列的矩形框重合情况进行检测,最先检测到矩形框重合的预测轨迹序列索引为k
collision
,碰撞时间记为ttc=k
collision
/f,ttc≤δt。
[0082]
s60、长时碰撞时间计算和碰撞情形判别:若s50矩形框重合检测中,预测轨迹范围内没有发生重合,则建立匀速模型,进行进一步的碰撞时间预测,参阅图1、图5和图6所示,包括以下步骤:
[0083]
s61、提取轨迹预测最末时刻k=δt
×
f时,自车1与并道交通车2的位置、速度和朝向角信息;
[0084]
s62、假设二者自此保持匀速直线行驶,为k=δt
×
f时刻并道交通车2相对同一时刻自车1的航向角,v
xk
为k=δt
×
f时刻并道交通车2与自车1的纵向相对速度,ε表示车辆直线行驶时航向角的正常波动范围,为一较小正实数,若v
xk
<0,碰撞情形及碰撞时间计算如下:
[0085]
碰撞情形〇:
[0086][0087]
若v
xk
<0,执行s63、s64、s65;
[0088]
s63、v
xk
<0时,计算纵向碰撞时间ttc
x
和侧向碰撞时间ttcy;纵侧向碰撞时间计算方法如下式所示:
[0089][0090][0091][0092]
[0093][0094][0095][0096]
上式中,xk、yk、v
xk
、v
yk
分别为k=δt
×
f时刻并道交通车2与自车1的纵向相对距离、横向相对距离、纵向相对速度、横向相对速度,离、横向相对距离、纵向相对速度、横向相对速度,
[0097]
s64、同组纵侧向碰撞时间相比较,确定碰撞情形,方法如下:
[0098]
若ttc
x,1
≥ttc
y,1
,则为碰撞情形ⅰ,表示自车1头部与并道交通车2尾部车角发生边对角碰撞;
[0099]
若ttc
x,2
≥ttc
y,2
&ttc
x,1
<ttc
y,1
,则为碰撞情形ⅱ,表示自车1头部车角与并道交通车2侧边发生角对边碰撞;
[0100]
若ttc
x,3
≥ttc
y,3
&ttc
x,2
<ttc
y,2
,则为碰撞情形ⅲ,表示并道交通车2头部车角与自车1侧边发生角对边碰撞;
[0101]
若ttc
x,4
≥ttc
y,4
&ttc
x,3
<ttc
y,3
,则为碰撞情形ⅳ,表示并道交通车2头部与自车1尾部车角发生边对角碰撞;
[0102]
s65、根据s64确定的碰撞情形,计算相应的碰撞时间ttc,计算公式如下:
[0103]
碰撞情形ⅰ:
[0104][0105]
碰撞情形ⅱ:
[0106][0107]
碰撞情形ⅲ:
[0108][0109]
碰撞情形ⅳ:
[0110][0111]
s70、根据s50和s60计算得到的碰撞时间ttc,计算自车1的期望加速度,方法如下:
[0112]
s71、若ttc≤δt或s60所判断的碰撞情形为〇、ⅰ或ⅱ,自车1期望制动减速度为:
[0113][0114]
s72、若s60所判断的碰撞情形为ⅲ或ⅳ,当前车道无前车,或与当前车道前车3的纵向距离x
follow
≥1.2thvh,自车期望加速度为:
[0115][0116]
s73、若s60所判断的碰撞情形为ⅲ或ⅳ,当前车道有前车,且与当前车道前车3的纵向距离x
follow
<1.2thvh,自车期望制动减速度同s71;
[0117]
其中,s71~s73中的a
bmax
、a
amax
分别为自车1能达到的最大制动加速度和最大加速度,vh为当前时刻自车1车速,th为汽车自适应巡航系统设定的跟车时距。
[0118]
s80、汽车自适应巡航系统与制动系统及驱动系统通信,使其产生合适的制动压力或发动机输出功率,控制车辆以期望加速度行驶至自适应巡航系统跟驰目标切换为并道交通车2,或与当前车道前车3的纵向距离小于等于跟车距离thvh。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1