车辆用驱动装置及其控制方法与流程
1.本发明涉及车辆用驱动装置及其控制方法。
背景技术:
2.在日本特开2007-246056中,公开了车辆用驱动装置,该车辆用驱动装置具备:动力源,具有第1旋转电机;第2旋转电机;第1输出轴,连接于动力源,将动力输出到前轮以及后轮中的一方的车轮;第2输出轴,将动力输出到所述前轮以及所述后轮中的另一方的车轮;差动机构,具有与所述第1输出轴连接的第1旋转元件、与所述第2输出轴连接的第2旋转元件以及与第2旋转电机连接的第3旋转元件,通过控制第2旋转电机的转矩,从而将来自动力源的转矩分配给第1输出轴和第2输出轴。
技术实现要素:
3.然而,在日本特开2007-246056所公开的车辆用驱动装置中,当在车辆减速时,想要在通过控制第2旋转电机的转矩而将来自动力源的转矩分配给第1输出轴和第2输出轴的行驶模式下实施基于第2旋转电机的再生控制时,存在与基于第2旋转电机的再生控制相伴地,对第1旋转元件产生正转矩,对第1输出轴产生正转矩这样的问题。
4.本发明是鉴于上述课题而完成的,提供能够在车辆减速时实施基于第2旋转电机的再生控制,并对第1输出轴以及第2输出轴产生负转矩第1旋转电机的车辆用驱动装置及其控制方法。
5.本发明的第1方式涉及具备具有第1旋转电机的动力源、第2旋转电机、第1输出轴、第2输出轴、差动装置以及电子控制装置的车辆用驱动装置。所述第1输出轴连接于所述动力源,构成为将动力输出到前轮以及后轮中的一方的车轮。所述第2输出轴构成为将动力输出到所述前轮以及所述后轮中的另一方的车轮。所述差动装置具有与所述第1输出轴连接的第1旋转元件、与所述第2输出轴连接的第2旋转元件以及与所述第2旋转电机连接的第3旋转元件。所述电子控制装置构成为当在搭载有所述车辆用驱动装置的车辆减速时,在通过控制所述第2旋转电机的转矩而将来自所述动力源的转矩分配给所述第1输出轴和所述第2输出轴的行驶模式下实施基于所述第2旋转电机的再生控制时,以使对所述第1输出轴以及所述第2输出轴产生负转矩的方式,实施基于所述第1旋转电机以及所述第2旋转电机的再生控制。
6.根据上述第1方式的车辆用驱动装置,能够在车辆减速时实施基于第2旋转电机的再生控制,并对第1输出轴以及第2输出轴产生负转矩。
7.在上述第1方式的车辆用驱动装置中,所述电子控制装置也可以构成为在车辆减速时,以使所述前轮以及所述后轮的制动力分配比成为目标制动力分配比的方式对所述第1旋转电机以及所述第2旋转电机进行再生控制。
8.根据上述结构的车辆用驱动装置,能够使前轮以及后轮的制动力成为适当的制动力。
9.在上述结构的车辆用驱动装置中,所述电子控制装置也可以构成为当在车辆减速时,无法通过基于所述第1旋转电机以及所述第2旋转电机的再生控制将所述制动力分配比控制成所述目标制动力分配比时,利用车轮制动器来补偿能够通过基于所述第1旋转电机以及所述第2旋转电机的再生控制得到的制动力相对于所述前轮以及所述后轮各自所需的制动力的不足量,将所述制动力分配比控制成所述目标制动力分配比。
10.根据上述结构的车辆用驱动装置,即使在无法通过基于第1旋转电机以及第2旋转电机的再生控制将制动力分配比控制成目标制动力分配比时,也能够使前轮以及后轮的制动力成为适当的制动力。
11.在上述结构的车辆用驱动装置中,所述电子控制装置也可以构成为根据目标减速度来设定所述目标制动力分配比。
12.根据上述结构的车辆用驱动装置,能够设定适合于目标减速度的目标制动力分配比。
13.另外,在上述第1方式的车辆用驱动装置中,所述电子控制装置也可以构成为在由于所述第1旋转电机的再生量的制约而无法通过基于所述第1旋转电机以及所述第2旋转电机的再生控制来达到目标减速度时,利用车轮制动器来覆盖减速度的不足量。
14.根据上述结构的车辆用驱动装置,即使在由于第1旋转电机的再生量的制约而无法通过基于第1旋转电机以及第2旋转电机的再生控制来达到目标减速度时,也能够达到目标减速度。
15.本发明的第2方式涉及具备具有第1旋转电机的动力源、第2旋转电机、第1输出轴、第2输出轴以及差动装置的车辆用驱动装置的控制方法。所述第1输出轴连接于所述动力源,构成为将动力输出到前轮以及后轮中的一方的车轮。所述第2输出轴构成为将动力输出到所述前轮以及所述后轮中的另一方的车轮。所述差动装置具有与所述第1输出轴连接的第1旋转元件、与所述第2输出轴连接的第2旋转元件以及与所述第2旋转电机连接的第3旋转元件。在所述控制方法中,当在搭载有所述车辆用驱动装置的车辆减速时,在通过控制所述第2旋转电机的转矩而将来自所述动力源的转矩分配给所述第1输出轴和所述第2输出轴的行驶模式下实施基于所述第2旋转电机的再生控制时,以使对所述第1输出轴以及所述第2输出轴产生负转矩的方式,进行基于所述第1旋转电机以及所述第2旋转电机的再生控制。
16.根据上述第2方式的控制方法,能够在车辆减速时实施基于第2旋转电机的再生控制,并对第1输出轴以及第2输出轴产生负转矩。
17.本发明的车辆用驱动装置及其控制方法起到能够在车辆减速时实施基于第2旋转电机的再生控制,并对第1输出轴以及第2输出轴产生负转矩这样的效果。
附图说明
18.下面将参照附图说明本发明的示例性实施例的特征、优点以及技术和工业上的意义,其中相同的符号表示相同的元件,并且其中:
19.图1示出具备实施方式的车辆用驱动装置的车辆的概略结构的图。
20.图2说明用于实施方式的车辆用驱动装置中的各种控制的控制系统的主要部分的图。
21.图3说明搭载于具备实施方式的车辆用驱动装置的车辆的复合变速器的概略结构
的图。
22.图4说明所述复合变速器所包含的有级变速部的变速级与接合装置的工作的组合的关系的图。
23.图5示出用于所述有级变速部的变速控制的变速映射的一个例子的图。
24.图6示出用于所述车辆的ev行驶模式与引擎行驶模式的切换控制的动力源切换映射的一个例子的图。
25.图7是示意地示出搭载于具备实施方式的车辆用驱动装置的车辆的传动装置的概略图,是示出传动装置成为第1驱动状态的情况下的概略图。
26.图8示出所述传动装置中的各旋转构件的接合关系的图。
27.图9示出所述传动装置中的各驱动状态与各接合装置的各工作状态的关系的图。
28.图10示出所述传动装置成为第2驱动状态的情况下的概略图。
29.图11示出所述传动装置成为第3驱动状态的情况下的概略图。
30.图12示出所述传动装置成为第4驱动状态的情况下的概略图。
31.图13示出所述传动装置成为第5驱动状态的情况下的概略图。
32.图14示出所述传动装置成为第6驱动状态的情况下的概略图。
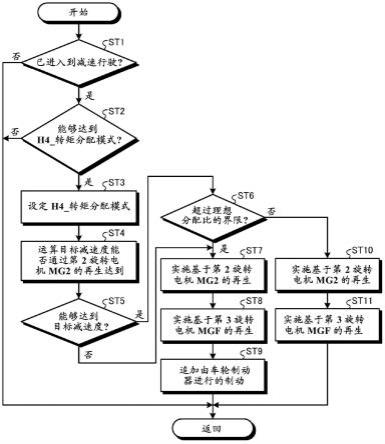
33.图15示出所述车辆用驱动装置所具备的电子控制装置实施的控制的一个例子的流程图。
34.图16示出所述车辆的前轮以及后轮的制动力分配的映射的一个例子的图。
具体实施方式
35.以下,说明本发明的车辆用驱动装置的实施方式。此外,本发明并不被本实施方式限定。
36.图1是示出具备实施方式的驱动装置10的车辆1的概略结构的图。车辆1具备左右的前轮3l、3r、左右的后轮4l、4r以及驱动装置10。驱动装置10是将作为第1动力源的引擎2的动力(转矩)分别传递给左右的前轮3l、3r和左右的后轮4l、4r的装置。该车辆1是以前置引擎后轮驱动为基础的四轮驱动车辆。
37.驱动装置10具备复合变速器11、传动装置12、前部传动轴13以及后部传动轴14、前轮用差动齿轮机构15、后轮用差动齿轮机构16、左右的前轮车轴17l、17r以及左右的后轮车轴18l、18r。复合变速器11连结于引擎2。传动装置12是与复合变速器11连结的前后轮动力分配装置。前部传动轴13以及后部传动轴14分别连结于传动装置12。前轮用差动齿轮机构15连结于前部传动轴13。后轮用差动齿轮机构16连结于后部传动轴14。左右的前轮车轴17l、17r连结于前轮用差动齿轮机构15。左右的后轮车轴18l、18r连结于后轮用差动齿轮机构16。此外,关于车轮和车轴,在不特别区分左右的情况下,省略符号l、r,记载为前轮3、后轮4、前轮车轴17、后轮车轴18。
38.引擎2例如是汽油引擎、柴油引擎等公知的内燃机。关于引擎2,通过由后述电子控制装置100控制引擎2所具备的节气门致动器、燃料喷射装置、点火装置等引擎控制装置101,从而控制作为引擎2的输出转矩的引擎转矩。
39.从引擎2输出的动力经由复合变速器11传递给传动装置12。然后,传递给传动装置12的动力依次经由后部传动轴14、后轮用差动齿轮机构16、后轮车轴18的后轮侧的动力传
递路径从传动装置12传递给后轮4。另外,传递给传动装置12的动力的一部分由传动装置12分配给前轮3,依次经由前部传动轴13、前轮用差动齿轮机构15、前轮车轴17的前轮侧的动力传递路径传递给前轮3。此外,在不特别区分动力的情况下,转矩、力也相同。
40.如图2所示,驱动装置10具备电子控制装置100。电子控制装置100例如构成为包括具备cpu、ram、rom以及输入输出接口等的所谓的微型计算机。cpu利用ram的临时存储功能,并依照预先存储于rom的程序而进行信号处理,从而执行各种控制。
41.来自车辆1所具备的各种传感器、开关等(例如引擎转速传感器70、输出转速传感器72、mg1转速传感器74、mg2转速传感器76、加速开度传感器78、节气门开度传感器80、电池传感器82、油温传感器84、4wd选择开关86、变速杆89的挡位传感器88、low(低)选择开关90以及lock(锁定)选择开关92等)的输出信号等分别被输入到电子控制装置100。另外,电子控制装置100例如根据作为蓄电装置的电池的充放电电流以及电池电压等,计算作为表示电池的充电状态的值的充电状态值soc[%]。
[0042]
另外,在车辆1中,在前轮3以及后轮4的附近,设置有作为对前轮3以及后轮4的旋转进行制动的制动机构的车轮制动器106,车轮制动器106从制动器致动器105接受工作力。车轮制动器106的工作力由电子控制装置100经由制动器致动器105根据由驾驶员操作的制动器踏板的操作量(踏力)等来控制。
[0043]
各种指令信号从电子控制装置100分别输出到驱动装置10所具备的各装置(例如,引擎控制装置101、旋转电机控制装置102、变速器控制装置103以及传动装置控制装置104等)。各种指令信号是指例如引擎控制指令信号、旋转电机控制指令信号以及油压控制指令信号等。引擎控制指令信号是用于控制引擎2的信号。旋转电机控制指令信号是用于分别控制第1旋转电机mg1、第2旋转电机mg2以及第3旋转电机mgf的信号。而且,油压控制指令信号是用于对控制复合变速器11的接合装置、传动装置12的接合装置等的工作状态的油压控制电路111的油压进行控制的信号。
[0044]
图3是说明实施方式的复合变速器11的概略结构的图。第1旋转电机mg1以及第2旋转电机mg2是具有作为电动机的功能以及作为发电机的功能的旋转电机,是所谓的电动发电机。第1旋转电机mg1以及第2旋转电机mg2作为能够产生驱动转矩的行驶用的动力源也就是说第1驱动源发挥功能。此外,第2旋转电机mg2是本发明中的第1动力源所具有的第1旋转电机的一个例子。第1旋转电机mg1以及第2旋转电机mg2分别经由车辆1所具备的逆变器(未图示)连接于作为车辆1所具备的蓄电装置的电池(未图示)。然后,关于第1旋转电机mg1以及第2旋转电机mg2,通过由旋转电机控制装置102控制逆变器,从而控制作为第1旋转电机mg1以及第2旋转电机mg2各自的输出转矩的mg1转矩以及mg2转矩。旋转电机的输出转矩在作为加速侧的正转矩时是动力运行转矩。另外,旋转电机的输出转矩在作为减速侧的负转矩时是再生转矩。电池是针对第1旋转电机mg1以及第2旋转电机mg2分别进行电力交换的蓄电装置。因而,车辆1是混合动力车辆。
[0045]
复合变速器11具备在作为安装于车体的非旋转构件的变速器壳体110内在共同的轴心上串联地配设的电动式差动部即无级变速部20以及机械式变速部即有级变速部22等。无级变速部20直接地或者经由未图示的减震器等间接地连结于引擎2。有级变速部22连结于无级变速部20的输出侧。另外,作为有级变速部22的输出旋转构件的输出轴24连结于传动装置12。在驱动装置10中,从引擎2、第2旋转电机mg2输出的动力被传递给有级变速部22,
经由传动装置12等从该有级变速部22传递给驱动轮。另外,无级变速部20、有级变速部22等相对于上述共同的轴心而大致对称地构成,在图3中,该轴心的下半部分被省略。上述共同的轴心是引擎2的曲轴、连结轴34等的轴心。
[0046]
无级变速部20具备第1旋转电机mg1和作为差动机构的差动装置32。差动装置32是将引擎2的动力机械性地分割给第1旋转电机mg1以及作为无级变速部20的输出旋转构件的中间传递构件30的动力分割机构。第2旋转电机mg2能够动力传递地连结于中间传递构件30。无级变速部20是通过控制第1旋转电机mg1的运转状态而控制差动装置32的差动状态的电动式差动部。无级变速部20作为使变速比变化的电动无级变速器进行工作,上述变速比是与作为输入旋转构件的连结轴34的转速相同的值的引擎转速与作为输出旋转构件的中间传递构件30的转速即mg2转速之比的值。
[0047]
作为差动机构的差动装置32由单小齿轮型的行星齿轮装置构成,具备太阳轮s0、行星架ca0以及齿圈r0。引擎2经由连结轴34能够动力传递地连结于行星架ca0,第1旋转电机mg1能够动力传递地连结于太阳轮s0,第2旋转电机mg2能够动力传递地连结于于齿圈r0。在差动装置32中,行星架ca0作为输入元件发挥功能,太阳轮s0作为反作用力元件发挥功能,齿圈r0作为输出元件发挥功能。
[0048]
有级变速部22是作为构成中间传递构件30与传动装置12之间的动力传递路径的一部分的有级变速器的机械式变速部也就是说构成无级变速部20与传动装置12之间的动力传递路径的一部分的机械式变速部。中间传递构件30还作为有级变速部22的输入旋转构件发挥功能。有级变速部22例如是公知的行星齿轮式的自动变速器,该自动变速器具备第1行星齿轮装置36以及第2行星齿轮装置38的多组行星齿轮装置和包括单向离合器f1的离合器c1、离合器c2、制动器b1、制动器b2的多个接合装置。以下,关于离合器c1、离合器c2、制动器b1以及制动器b2,在不特别区分的情况下,简称为接合装置cb。
[0049]
接合装置cb是包括被油压致动器按压的多板式或者单板式的离合器、制动器、被油压致动器拉紧的带式制动器等的油压式的摩擦接合装置。接合装置cb根据从车辆1所具备的油压控制电路111输出的作为调压后的预定油压的各油压而分别切换作为接合、分离等状态的工作状态。
[0050]
在有级变速部22中,第1行星齿轮装置36以及第2行星齿轮装置38的各旋转元件直接地或者经由接合装置cb、单向离合器f1间接地一部分相互连结,或者连结于中间传递构件30、变速器壳体110或者输出轴24。第1行星齿轮装置36的各旋转元件是太阳轮s1、行星架ca1、齿圈r1,第2行星齿轮装置38的各旋转元件是太阳轮s2、行星架ca2、齿圈r2。
[0051]
有级变速部22是通过作为多个接合装置cb中的任意接合装置cb的例如预定的接合装置cb的接合来形成变速比(=at输入转速/输出转速)不同的多个变速级(还称为挡位)中的任意挡位的有级变速器。也就是说,在有级变速部22中,通过选择性地接合多个接合装置cb,从而挡位被切换,即执行变速。有级变速部22是分别形成多个挡位的有级式的自动变速器。在实施方式中,将由有级变速部22形成的挡位称为at挡位。at输入转速是作为有级变速部22的输入旋转构件的转速的有级变速部22的输入转速,为与中间传递构件30的转速相同的值,另外,为与作为第2旋转电机mg2的转速的mg2转速相同的值。at输入转速能够用mg2转速表示。输出转速是作为有级变速部22的输出转速的输出轴24的转速,也是作为将无级变速部20与有级变速部22合起来而成的整体的变速器的复合变速器11的输出转速。复合变
速器11是构成引擎2与传动装置12之间的动力传递路径的一部分的变速器。
[0052]
图4是说明有级变速部22的at挡位与接合装置cb的工作的组合的关系的图。在图4中,
“○”
表示接合,
“△”
表示根据需要而接合,空栏表示分离。有级变速部22例如如图4所示,作为多个at挡位,形成at1速挡位(图4中的“第一”)至at4速挡位(图4中的“第四”)的4级的前进用的at挡位、后退用的at挡位(图4中的“r”)。at1速挡位的变速比最大,越靠高侧的at挡位,其变速比越小。
[0053]
关于有级变速部22,由电子控制装置100切换根据驾驶员的加速操作、车速等形成的at挡位,即,选择性地形成多个at挡位。例如,在有级变速部22的变速控制中,执行所谓的离合器到离合器变速,在该所谓的离合器到离合器变速中,通过接合装置cb中的任意接合装置cb的操作状态切换来执行变速,即,通过接合装置cb的接合与分离的切换来执行变速。在实施方式中,例如将从at2速挡位向at1速挡位的降挡表示为2
→
1降挡挡。关于其它升挡、降挡也相同。
[0054]
返回到图3,复合变速器11还具备单向离合器f0。单向离合器f0是能够将行星架ca0以无法旋转的方式固定的锁定机构。即,单向离合器f0是锁定机构,该锁定机构能够将与引擎2的曲轴连结的、与行星架ca0一体地旋转的连结轴34固定于变速器壳体110。在单向离合器f0中,能够相对旋转的两个构件中的一方的构件一体地连结于连结轴34,另一方的构件一体地连结于变速器壳体110。单向离合器f0相对于作为引擎2的运转时的旋转方向的正旋转方向空转,另一方面,相对于与引擎2的运转时相反的旋转方向自动接合。因而,在单向离合器f0的空转时,引擎2被设为相对于变速器壳体110而能够相对旋转的状态。另一方面,在单向离合器f0的接合时,引擎2被设为相对于变速器壳体110而无法相对旋转的状态。即,通过单向离合器f0的接合,引擎2固定于变速器壳体110。这样,单向离合器f0容许作为引擎2的运转时的旋转方向的行星架ca0的正旋转方向的旋转、且阻止行星架ca0的负旋转方向的旋转。即,单向离合器f0是能够容许引擎2的正旋转方向的旋转、且阻止负旋转方向的旋转的锁定机构。
[0055]
复合变速器11能够利用形成有at挡位的有级变速部22和作为无级变速器进行工作的无级变速部20构成无级变速部20与有级变速部22串联地配置的无级变速器。或者,还能够使无级变速部20如有级变速器那样变速,所以能够使复合变速器11作为整体而如有级变速器那样变速。也就是说,在复合变速器11中,能够以使表示引擎转速与输出转速之比的值的变速比不同的多个挡位选择性地成立的方式,控制有级变速部22和无级变速部20。
[0056]
电子控制装置100使用作为预先决定的关系的例如如图5所示的at挡位变速映射来进行有级变速部22的变速判断,根据需要而经由变速器控制装置103执行有级变速部22的变速控制。在该有级变速部22的变速控制中,以自动地切换有级变速部22的at挡位的方式,将用于利用各电磁阀来切换接合装置cb的接合分离状态的油压控制指令信号从变速器控制装置103输出到油压控制电路111。
[0057]
图5所示的at挡位变速映射例如是在将车速以及根据加速开度计算的所需驱动转矩作为变量的二维坐标上具有用于判断有级变速部22的变速的变速线的预定的关系。此外,在at挡位变速映射中,既可以代替车速而使用输出转速等,另外,也可代替所需驱动转矩而使用所需驱动力、加速开度、节气门开度等。在图5所示的at挡位变速映射中,实线所示的变速线是用于判断升挡的升挡线,虚线所示的变速线是用于判断降挡的降挡线。
[0058]
图6是示出用于ev行驶模式与引擎行驶模式的切换控制的动力源切换映射的一个例子的图。在实施方式的驱动装置10中,根据如图6所示的用于ev行驶模式与引擎行驶模式的切换控制的动力源切换映射,切换ev行驶模式和引擎行驶模式。图6所示的映射是在将车速以及所需驱动转矩作为变量的二维坐标上具有以引擎行驶模式行驶的引擎行驶区域与以ev行驶模式行驶的ev行驶区域的边界线的预定的关系。此外,图6中的ev行驶区域与引擎行驶区域的边界线换言之是用于切换ev行驶模式和引擎行驶模式的切换线。
[0059]
图7是示意地示出实施方式的传动装置12的概略图,是示出传动装置12成为第1驱动状态的情况下的概略图。
[0060]
实施方式的传动装置12具备作为非旋转构件的传动装置壳体120。传动装置12在传动装置壳体120内具备输入轴61、后轮侧输出轴63以及前轮侧输出轴62。后轮侧输出轴63是向后轮4输出动力的第1输出轴。前轮侧输出轴62是向前轮3输出动力的第2输出轴。第3行星齿轮装置64是作为差动机构的装置。另外,传动装置12在传动装置壳体120内,作为形成前轮3的动力传递路径的旋转构件而具备传递构件65、主动齿轮66以及从动齿轮67以及前轮用驱动链68。传递构件65是作为向前轮3的输入旋转构件发挥功能的构件。主动齿轮66是对前轮侧输出轴62输出动力的齿轮。从动齿轮67是一体地设置于前轮侧输出轴62的齿轮。前轮用驱动链68是将主动齿轮66与从动齿轮67之间进行连结的链。进而,传动装置12在传动装置壳体120内具备作为第2动力源发挥功能的第3旋转电机mgf、切换旋转构件的连接状态的连接切换装置40、离合器cf1以及制动器bf1。此外,第3旋转电机mgf是本发明中的第2旋转电机的一个例子。
[0061]
输入轴61是将来自引擎2等第1动力源的动力输入到传动装置12的输入旋转构件。来自复合变速器11的动力被输入到输入轴61。例如,输入轴61花键嵌合于作为复合变速器11的输出旋转构件的输出轴24。
[0062]
后轮侧输出轴63是将动力从传动装置12输出到后轮4的输出旋转构件。该后轮侧输出轴63是与输入轴61配置于同一轴线上,与后部传动轴14(参照图1)连结的驱动轴。
[0063]
前轮侧输出轴62是从传动装置12向前轮3输出动力的输出旋转构件。该前轮侧输出轴62是与输入轴61以及后轮侧输出轴63配置于不同的轴线上,与前部传动轴13(参照图1)连结的驱动轴。主动齿轮66旋转,从而前轮侧输出轴62经由前轮用驱动链68以及从动齿轮67旋转。
[0064]
主动齿轮66与传递构件65以一体旋转的方式连结。传递构件65是向前轮侧输出轴62传递动力的旋转构件。传递构件65以及主动齿轮66相对于后轮侧输出轴63而能够相对旋转地配置。在传动装置12中,在与后轮侧输出轴63相同的旋转中心上,配置有传递构件65以及主动齿轮66、第3行星齿轮装置64。
[0065]
第3行星齿轮装置64由具有三个旋转元件的单小齿轮型的行星齿轮装置构成。如图7所示,第3行星齿轮装置64作为三个旋转元件而具备太阳轮s3、行星架ca3以及齿圈r3。行星架ca3将相互啮合的多对小齿轮以能够自转且能够公转的方式进行支承。齿圈r3经由小齿轮而与太阳轮s3啮合。第3旋转电机mgf始终连结于太阳轮s3。
[0066]
能够与输入轴61连结的第1旋转构件51连结于太阳轮s3。第1旋转构件51是与太阳轮s3一体旋转的构件,具有齿轮齿51a。另外,对第1旋转构件51安装有输入来自第3旋转电机mgf的动力的输入齿轮55。输入齿轮55与第1旋转构件51一体旋转。
[0067]
能够与后轮侧输出轴63连结的第3旋转构件53连结于行星架ca3。第3旋转构件53是与行星架ca3一体旋转的构件,具有齿轮齿53a。另外,传递构件65连结于行星架ca3。传递构件65是与行星架ca3一体旋转的构件。
[0068]
能够与后轮侧输出轴63连结的第2旋转构件52连结于齿圈r3。第2旋转构件52是与齿圈r3一体旋转的构件,具有齿轮齿52a。
[0069]
第3旋转电机mgf是能够作为电动机以及发电机发挥功能的电动发电机(mg)。第3旋转电机mgf具备转子、定子以及与转子一体旋转的输出轴,经由逆变器而与电池电连接。如图7所示,输出齿轮54设置于第3旋转电机mgf的输出轴。输出齿轮54与输入齿轮55啮合,由输出齿轮54和输入齿轮55形成减速齿轮列。因此,在作为第3旋转电机mgf的输出转矩的mgf转矩被传递给输入齿轮55时,第3旋转电机mgf的旋转变速(减速)而传递给太阳轮s3。
[0070]
连接切换装置40是选择性地切换输入轴61与后轮侧输出轴63的连接目的地的装置。换言之,连接切换装置40是切换构成传动装置12的旋转构件的连接状态的装置。具体而言,连接切换装置40选择性地切换与第3行星齿轮装置64的各旋转元件一体旋转的第1旋转构件51、第2旋转构件52以及第3旋转构件53的连接目的地。如图7所示,连接切换装置40具备第1爪形离合器d1和第2爪形离合器d2。
[0071]
第1爪形离合器d1是切换输入轴61的连接目的地的第1断接机构。如图7所示,第1爪形离合器d1将输入轴61选择性地连结于第1旋转构件51(太阳轮s3)或者后轮侧输出轴63。即,第1爪形离合器d1切换不经由第3行星齿轮装置64地将来自输入轴61的动力传递给后轮侧输出轴63的第1输入状态和经由第3行星齿轮装置64将来自输入轴61的动力传递给后轮侧输出轴63的第2输入状态。
[0072]
第1爪形离合器d1具有作为切换构件的第1切换套筒41。第1切换套筒41具有与输入轴61的齿轮齿61a啮合的第1齿轮齿41a以及与后轮侧输出轴63的第1齿轮齿63a或者第1旋转构件51的齿轮齿51a啮合的第2齿轮齿41b。第1切换套筒41利用第1爪形离合器d1的致动器在轴向上移动。然后,第1切换套筒41以在第1齿轮齿41a与输入轴61的齿轮齿61a始终啮合的状态下,成为第2齿轮齿41b与后轮侧输出轴63的第1齿轮齿63a啮合的第1输入状态、第2齿轮齿41b与后轮侧输出轴63的第1齿轮齿63a以及第1旋转构件51的齿轮齿51a都不啮合的分离状态以及第2齿轮齿41b与第1旋转构件51的齿轮齿51a啮合的第2输入状态中的任意状态的方式被切换。
[0073]
第2爪形离合器d2是切换后轮侧输出轴63的连接目的地的第2断接机构。第2爪形离合器d2将后轮侧输出轴63选择性地连结于第2旋转构件52(齿圈r3)或者第3旋转构件53(行星架ca3)。即,第2爪形离合器d2切换在后轮侧输出轴63与第2旋转构件52(齿圈r3)之间进行动力传递的第1传递状态和在后轮侧输出轴63与第3旋转构件53(行星架ca3)之间进行动力传递的第2传递状态。
[0074]
第2爪形离合器d2具有作为切换构件的第2切换套筒42。第2切换套筒42具有第1齿轮齿42a和第2齿轮齿42b。第2切换套筒42的第1齿轮齿42a能够和与齿圈r3一体旋转的第2旋转构件52的齿轮齿52a以及与行星架ca3一体旋转的第3旋转构件53的齿轮齿53a选择性地啮合。第2切换套筒42利用第2爪形离合器d2的致动器在轴向上移动。然后,第2切换套筒42以在第2齿轮齿42b与后轮侧输出轴63的第2齿轮齿63b始终啮合的状态下,成为第1齿轮齿42a与第2旋转构件52的齿轮齿52a啮合的第1传递状态、第1齿轮齿42a与第2旋转构件52
的齿轮齿52a以及第3旋转构件53的齿轮齿53a都不啮合的分离状态、第1齿轮齿42a与第3旋转构件53的齿轮齿53a啮合的第2传递状态中的任意状态的方式被切换。
[0075]
离合器cf1是将第3行星齿轮装置64的太阳轮s3与行星架ca3选择性地进行接合,使太阳轮s3、行星架ca3以及齿圈r3一体旋转的差动机构的第1接合元件。
[0076]
制动器bf1是将第3行星齿轮装置64的齿圈r3选择性地固定于固定构件69的差动机构的第2接合元件。固定构件69是传动装置壳体120自身或与传动装置壳体120一体化的非旋转构件。传动装置12当制动器bf1被设为分离状态时,被设定为高速侧变速级hi,当制动器bf1被设为接合状态时,被设定为低速侧变速级lo。
[0077]
图8是示出实施方式的传动装置12中的各旋转构件的接合关系的图。此外,图8中,将第3旋转电机mgf记载为“mgf”,将太阳轮s3记载为“s3”,将行星架ca3记载为“ca3”,将齿圈r3记载为“r3”,将制动器bf1记载为“bf1”,将离合器cf1记载为“cf1”,将前轮侧输出轴62记载为“fr”以及将后轮侧输出轴63记载为“rr”。另外,图8中,d1(1)表示第1爪形离合器d1的第1输入状态下的连结部位,d1(2)表示第1爪形离合器d1的第2输入状态下的连结部位。另外,在图8中,d2(1)表示第2爪形离合器d2的第1传递状态下的连结部位,d2(2)表示第2爪形离合器d2的第2传递状态下的连结部位。
[0078]
实施方式的传动装置12连接于作为第1动力源的引擎2等,具备后轮侧输出轴63、前轮侧输出轴62、齿圈r3、行星架ca3以及第3行星齿轮装置64。后轮侧输出轴63是对作为前轮3以及后轮4中的一方的车轮的后轮4输出动力的第1输出轴。前轮侧输出轴62是对作为前轮3以及后轮4中的另一方的车轮的前轮3输出动力的第2输出轴。齿圈r3是与后轮侧输出轴63连接的第1旋转元件。行星架ca3是与前轮侧输出轴62连接的第2旋转元件。而且,第3行星齿轮装置64是具有作为与第3旋转电机mgf连接的第3旋转元件的太阳轮s3的差动机构的装置。
[0079]
然后,实施方式的传动装置12由电子控制装置100切换驱动状态,能够设定为第1驱动状态、第2驱动状态、第3驱动状态、第4驱动状态、第5驱动状态以及第6驱动状态。
[0080]
在此,说明第1驱动状态~第6驱动状态。图9是示出传动装置12中的各驱动状态与各接合装置的各工作状态的关系的图。在图9中,
“○”
表示接合,
“△”
表示根据需要而接合,空栏表示分离。
[0081]
图7所示的第1驱动状态是ev(ff)_hi的使用来自第3旋转电机mgf的动力使车辆1行驶的ev行驶模式下的驱动状态,是第3旋转电机mgf的动力仅被传递给前轮3的双轮驱动状态。此外,在第1驱动状态下,传动装置12被设定为高速侧变速级hi。另外,在第1驱动状态下,复合变速器11的有级变速部22被设定为空挡。
[0082]
在传动装置12成为第1驱动状态的情况下,如图9所示,制动器bf1成为分离状态,离合器cf1成为接合状态,第1爪形离合器d1成为分离状态以及第2爪形离合器d2成为分离状态。在第1驱动状态下,第3行星齿轮装置64成为太阳轮s3与行星架ca3利用离合器cf1连结的直接连结状态。在第1驱动状态下,在将第3旋转电机mgf的动力传递给前轮侧输出轴62时,使第3旋转电机mgf的旋转不通过第3行星齿轮装置64变速而传递给前轮侧输出轴62。
[0083]
图10是示出实施方式的传动装置12成为第2驱动状态的情况下的概略图。第2驱动状态是ev(ff)_lo的使用来自第3旋转电机mgf的动力使车辆1行驶的ev行驶模式下的驱动状态,是第3旋转电机mgf的动力仅被传递给前轮3的双轮驱动状态。此外,在第2驱动状态
下,传动装置12被设定为低速侧变速级lo。另外,在第2驱动状态下,复合变速器11的有级变速部22被设定为空挡。
[0084]
在传动装置12成为第2驱动状态的情况下,如图9所示,制动器bf1成为接合状态,离合器cf1成为分离状态,第1爪形离合器d1成为分离状态以及第2爪形离合器d2成为分离状态。在第2驱动状态下,第3行星齿轮装置64成为齿圈r3利用制动器bf1固定于固定构件69的减速状态。在第2驱动状态下,在将第3旋转电机mgf的动力传递给前轮侧输出轴62时,使第3旋转电机mgf的旋转通过第3行星齿轮装置64减速而传递给前轮侧输出轴62。
[0085]
图11是示出实施方式的传动装置12成为第3驱动状态的情况下的概略图。第3驱动状态是h4_转矩分配的将传递给传动装置12的动力分配给前轮3侧和后轮4侧而使车辆1行驶的模式下的驱动状态,是对前轮3和后轮4传递动力的四轮驱动状态。在第3驱动状态下,利用第3旋转电机mgf的mgf转矩使将来自输入轴61的转矩分配给前轮侧输出轴62和后轮侧输出轴63的转矩分配比变化。换言之,针对从后轮侧输出轴63传递给第3行星齿轮装置64的齿圈r3的转矩,将第3旋转电机mgf的mgf转矩作为反作用力,由第3行星齿轮装置64的太阳轮s3接收,从而按照任意的比率将传递给齿圈r3的转矩分配给前轮3侧和后轮4侧。此外,在第3驱动状态下,传动装置12被设定为高速侧变速级hi。
[0086]
在传动装置12成为第3驱动状态的情况下,如图9所示,制动器bf1成为分离状态,离合器cf1成为分离状态,第1爪形离合器d1成为第1输入状态以及第2爪形离合器d2成为第1传递状态。此外,图11中的第1爪形离合器d1中的(1)表示第1爪形离合器d1是第1输入状态。另外,图11中的第2爪形离合器d2中的(1)表示第2爪形离合器d2是第1传递状态。
[0087]
图12是示出实施方式的传动装置12成为第4驱动状态的情况下的概略图。第4驱动状态是h4_lsd的将传递给传动装置12的动力分配给前轮3侧和后轮4侧而使车辆1行驶的模式下的驱动状态,是对前轮3和后轮4传递动力的四轮驱动状态。第4驱动状态是通过离合器cf1的接合控制来限制前轮侧输出轴62与后轮侧输出轴63之间的旋转差动的驱动状态。在第4驱动状态下,通过离合器cf1的接合控制,将来自输入轴61的转矩分配给前轮侧输出轴62和后轮侧输出轴63的转矩分配比发生变化。此外,在第4驱动状态下,传动装置12被设定为高速侧变速级hi。
[0088]
在传动装置12成为第4驱动状态的情况下,如图9所示,制动器bf1成为分离状态,离合器cf1成为接合控制(半接合)状态,第1爪形离合器d1成为第1输入状态以及第2爪形离合器d2成为第1传递状态。此外,图12中的第1爪形离合器d1中的(1)表示第1爪形离合器d1是第1输入状态。另外,图12中的第2爪形离合器d2中的(1)表示第2爪形离合器d2是第1传递状态。
[0089]
图13是示出实施方式的传动装置12成为第5驱动状态的情况下的概略图。第5驱动状态是h4_lock(固定分配4wd)的将传递给传动装置12的动力分配给前轮3侧和后轮4侧而使车辆1行驶的模式下的驱动状态,是对前轮3和后轮4传递动力的四轮驱动状态。第5驱动状态是无法进行前轮侧输出轴62与后轮侧输出轴63之间的旋转差动的驱动状态,将来自输入轴61的转矩分配给前轮侧输出轴62和后轮侧输出轴63的转矩分配比被固定。此外,在第5驱动状态下,传动装置12被设定为高速侧变速级hi。
[0090]
在传动装置12成为第5驱动状态的情况下,如图9所示,制动器bf1成为分离状态,离合器cf1成为分离状态,第1爪形离合器d1成为第1输入状态以及第2爪形离合器d2成为第
2传递状态。此外,图13中的第1爪形离合器d1中的(1)表示第1爪形离合器d1是第1输入状态。另外,图13中的第2爪形离合器d2中的(2)表示第2爪形离合器d2是第2传递状态。
[0091]
图14是示出实施方式的传动装置12成为第6驱动状态的情况下的概略图。第6驱动状态是l4_lock(固定分配4wd)的将传递给传动装置12的动力分配给前轮3侧和后轮4侧而使车辆1行驶的模式下的驱动状态,是对前轮3和后轮4传递动力的四轮驱动状态。第6驱动状态是无法进行前轮侧输出轴62与后轮侧输出轴63之间的旋转差动的驱动状态,将来自输入轴61的转矩分配给前轮侧输出轴62和后轮侧输出轴63的转矩分配比被固定。此外,在第6驱动状态下,传动装置12被设定为低速侧变速级lo。
[0092]
在传动装置12成为第6驱动状态的情况下,如图9所示,制动器bf1成为接合状态,离合器cf1成为分离状态,第1爪形离合器d1成为第2输入状态以及第2爪形离合器d2成为第2传递状态。此外,图14中的第1爪形离合器d1中的(2)表示第1爪形离合器d1是第2输入状态。另外,图14中的第2爪形离合器d2中的(2)表示第2爪形离合器d2是第2传递状态。
[0093]
在实施方式的传动装置12中,能够根据车辆1的行驶状态在第1驱动状态、第2驱动状态、第3驱动状态以及第4驱动状态之间将驱动状态相互进行切换。另外,关于第5驱动状态,在与第3驱动状态和第4驱动状态之间,驾驶员接通/关断设置于车辆1的lock选择开关92,从而能够将驱动状态相互进行切换。另外,关于第6驱动状态,在与第5驱动状态之间,在车辆停车时,驾驶员接通/关断设置于车辆1的low选择开关90,从而能够将驱动状态相互进行切换。
[0094]
电子控制装置100为了切换传动装置12的驱动状态,根据来自搭载于车辆1的各种传感器、4wd选择开关86以及low选择开关90等的输出信号,利用传动装置控制装置104来控制油压控制电路111,控制使第1爪形离合器d1以及第2爪形离合器d2工作的致动器、制动器bf1以及离合器cf1的工作状态。
[0095]
在实施方式的电子控制装置100中,当在车辆减速时,在通过控制第3旋转电机mgf的mgf转矩而将来自具有第2旋转电机mg2的第1动力源的转矩分配给前轮侧输出轴62和后轮侧输出轴63的行驶模式下实施第3旋转电机mgf的再生控制时,也就是说,当在h4_转矩分配模式下实施第3旋转电机mgf的再生控制时,以使对前轮侧输出轴62以及后轮侧输出轴63产生负转矩的方式,对第2旋转电机mg2以及第3旋转电机mgf进行再生控制。由此,能够在车辆减速时实施基于第3旋转电机mgf的再生控制,并对前轮侧输出轴62以及后轮侧输出轴63产生负转矩。
[0096]
另外,在实施方式的电子控制装置100中,在车辆减速时,以使前轮3以及后轮4的制动力分配比成为作为目标制动力分配比的理想分配比的方式对第2旋转电机mg2以及第3旋转电机mgf进行再生控制。由此,能够使前轮3以及后轮4的制动力成为适当的动力。
[0097]
图15是示出实施方式的电子控制装置100实施的控制的一个例子的流程图。图16是示出前轮3以及后轮4的制动力分配的映射的一个例子的图。此外,在图16中,将横轴设为前轮制动力,将纵轴设为后轮制动力。另外,图16中的实线是表示前轮3与后轮4的理想的制动力的分配的理想制动力分配线。如图16所示,目标减速度越从0.1g增大到0.8g,则沿着在图16中实线所示的理想制动力分配线而越向右上前进,进行制动力分配的控制。换言之,前轮3以及后轮4的目标制动力分配比以使前轮制动力和后轮制动力在理想制动力分配线上推移的方式被决定。即,目标制动力分配比根据目标减速度来设定。此外,图16中的l-
point是能够通过基于第2旋转电机mg2以及第3旋转电机mgf的再生控制将制动力分配比控制成目标制动力分配比的界限点。即,如图16所示,随着目标减速度从0.1g增大到0.8g,向前轮3的制动力的分担比例(前轮3的制动力分配比率)增大,但仅凭基于第2旋转电机mg2以及第3旋转电机mgf的再生控制来增加向前轮3的制动力的分担比例会存在界限。向前轮3的制动力的分担比例不增加的点是界限点。
[0098]
如图15所示,电子控制装置100在步骤st1中,进行车辆1是否进入到减速行驶的判断。电子控制装置100在判断为车辆1未进入到减速行驶的情况下(在步骤st1中为否),使本控制返回。另一方面,电子控制装置100在判断为车辆1进入到减速行驶的情况下(在步骤st1中为是),在步骤st2中,进行是否能够达到h4_转矩分配模式的判断。此外,例如,在第3旋转电机mgf的失效时等,无法达到h4_转矩分配模式。
[0099]
电子控制装置100在判断为无法达到h4_转矩分配模式的情况下(在步骤st2中为否),使本控制返回。另一方面,电子控制装置100在判断为能够达到h4_转矩分配模式的情况下(在步骤st2中为是),在步骤st3中,设定h4_转矩分配模式。
[0100]
接下来,电子控制装置100在步骤st4中,运算目标减速度能否通过第2旋转电机mg2的再生控制达到。即,运算为了达到目标减速度而所需的第2旋转电机mg2的再生量。此外,目标减速度根据加速开度、制动器的踩踏量以及由用户进行的减速度设定等确定。另外,第2旋转电机mg2的再生量根据此时的第2旋转电机mg2的转速和转矩确定。另外,第2旋转电机mg2的再生量也可以考虑引擎制动而运算。
[0101]
接下来,电子控制装置100在步骤st5中,根据步骤st4中的运算结果,进行能否达到目标减速度的判断。即,进行能够通过第2旋转电机mg2来实现的再生量是否为为了达到目标减速度而所需的第2旋转电机mg2的再生量以上的判断。此外,能够通过第2旋转电机mg2来实现的再生量在第2旋转电机mg2能够按照规格使用的情况下,根据按照规格的值来求出,例如,在对第2旋转电机mg2的动作施加有负载率限制时,考虑该限制而求出,进行能否达到目标减速度的判断。另外,在电池的soc为soc的预定值以上,对电池的充电量施加有限制的情况下,考虑该电池的充电量的限制而求出能够通过第2旋转电机mg2来实现的再生量,进行能否达到目标减速度的判断。
[0102]
电子控制装置100在判断为能够达到目标减速度的情况下(在步骤st5中为是),在步骤st6中,进行是否超过理想分配比的界限的判断。即,进行目标减速度是否超过界限点的判断。此外,在车辆减速时,谋求尽可能通过基于第2旋转电机mg2的再生控制来回收能量,例如,当利用车轮制动器106使车辆1减速时,回收的能量产生损失,所以要极力避免该情况。然而,当通过第2旋转电机mg2的再生控制继续输出减速度时,相对于图16中的实线所示的理想制动力分配线,向后轮4的制动力的分担比例变得过大,所以要避免该情况。
[0103]
电子控制装置100在判断为超过理想分配比的界限的情况下(在步骤st6中为是),在步骤st7中,实施基于第2旋转电机mg2的再生控制。接下来,电子控制装置100在步骤st8中,实施基于第3旋转电机mgf的再生控制。
[0104]
接下来,电子控制装置100在步骤st9中,追加由车轮制动器106进行的制动。即,在无法通过基于第2旋转电机mg2以及第3旋转电机mgf的再生控制将制动力分配比控制成目标制动力分配比时,利用车轮制动器106来补偿能够通过基于第2旋转电机mg2以及第3旋转电机mgf的再生控制得到的制动力相对于前轮3以及后轮4各自所需的制动力的不足量,将
制动力分配比控制成目标制动力分配比。
[0105]
接下来,电子控制装置100在实施步骤st9的处理之后,使本控制返回。
[0106]
另一方面,在步骤st6中,电子控制装置100在判断为不超过理想分配比的界限的情况下(在步骤st6中为否),在步骤st10中,实施基于第2旋转电机mg2的再生控制。在该情况下,能够仅利用第2旋转电机mg2回收车辆减速时的能量。
[0107]
接下来,电子控制装置100在步骤st11中,实施基于第3旋转电机mgf的再生控制。之后,电子控制装置100使本控制返回。
[0108]
另外,在步骤st5中,电子控制装置100在判断为无法达到目标减速度的情况下(在步骤st5中为否),在步骤st7中,实施基于第2旋转电机mg2的再生控制。接下来,电子控制装置100在步骤st8中,实施基于第3旋转电机mgf的再生控制。接下来,电子控制装置100在步骤st9中,追加由车轮制动器106进行的制动。即,在由于第2旋转电机mg2的再生量的制约而无法通过基于第2旋转电机mg2以及第3旋转电机mgf的再生控制达到目标减速度时,以利用车轮制动器106来达到减速度的不足量的方式追加由车轮制动器106进行的制动。在该情况下,也利用车轮制动器106来补偿能够通过基于第2旋转电机mg2以及第3旋转电机mgf的再生控制得到的制动力相对于前轮3以及后轮4各自所需的制动力的不足量,将制动力分配比控制成目标制动力分配比。之后,电子控制装置100使本控制返回。
[0109]
如以上那样,电子控制装置100当在车辆减速时,在h4_转矩分配模式下实施第3旋转电机mgf的再生控制时,以使对前轮侧输出轴62以及后轮侧输出轴63产生负转矩的方式,实施基于第2旋转电机mg2以及第3旋转电机mgf的再生控制。由此,能够在车辆减速时实施基于第3旋转电机mgf的再生控制,并对前轮侧输出轴62以及后轮侧输出轴63产生负转矩。
[0110]
另外,电子控制装置100在车辆减速时,以使前轮3以及后轮4的制动力分配比成为作为目标制动力分配比的理想分配比的方式对第2旋转电机mg2以及第3旋转电机mgf进行再生控制。由此,能够使前轮3以及后轮4的制动力成为适当的制动力。
[0111]
此外,在实施方式中,传动装置12为了设定l4_lock模式,设为具备第1爪形离合器d1,但在不设定l4_lock模式的情况下,也能够省略第1爪形离合器d1。在该情况下,输入轴61与后轮侧输出轴63始终连结。
[0112]
另外,在实施方式中,设为传动装置12具备离合器cf1以及制动器bf1,但还能够省略离合器cf1以及制动器bf1的一方或者两方。
[0113]
另外,在实施方式中,设为离合器cf1将行星架ca3与太阳轮s3进行接合,但既可以设为将行星架ca3与齿圈r3进行接合,也可以设为将太阳轮s3与齿圈r3进行接合。
[0114]
另外,在实施方式中,设为第1动力源具有引擎2,但还能够省略引擎2。在该情况下,车辆1被设为电动车辆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1