管理器、车辆控制方法、非暂时性存储介质、车辆与流程
1.本公开涉及用于对搭载于车辆的促动器进行控制的管理器、车辆控制方法、非暂时性存储介质、车辆。
背景技术:
2.作为基于来自对驾驶员的驾驶进行辅助的驾驶辅助系统的请求来控制被搭载于车辆的促动器的控制装置,例如有一种记载于日本特开2020-032893的控制装置。日本特开2020-032893所记载的控制装置从驾驶辅助系统受理与车辆的横向的运动相关的请求,将受理到的请求分配给1个以上的促动器。
3.在被搭载于车辆的多个促动器之中存在响应性迟钝的促动器。即便想要即时实现来自驾驶辅助系统的请求,也存在因促动器的响应延迟而无法按照来自系统的请求进行车辆控制的情况,存在改善的余地。
技术实现要素:
4.本公开提供能够改善促动器对于驾驶辅助系统的行动计划的响应延迟的管理器、车辆控制方法、非暂时性存储介质、车辆。
5.本公开的第1方式所涉及的管理器包括1个以上的处理器。1个以上的处理器构成为:从安装有adas应用功能的多个电子控制单元受理多个第1行动计划,并且受理比至少一个第1行动计划靠后的第2行动计划。1个以上的处理器构成为对多个第1行动计划进行协调。1个以上的处理器构成为基于协调结果来计算1个以上的运动请求。1个以上的处理器构成为将1个以上的运动请求输出至1个以上的促动器系统。
6.在本公开的第1方式所涉及的管理器中,1个以上的处理器可以构成为在上述1个以上的促动器系统包括需要动作状态的切换的促动器系统的情况下,预先输出对于需要动作状态的切换的促动器系统的运动请求。运动请求可以包含于1个以上的运动请求。在本公开的第1方式所涉及的管理器中,1个以上的处理器可以构成为基于第2行动计划来预先输出对于需要动作状态的切换的促动器系统的运动请求。运动请求可以包含于上述1个以上的运动请求。在本公开的第1方式所涉及的管理器中,1个以上的处理器可以构成为基于促动器系统的响应性信息来预先输出对于需要动作状态的切换的促动器系统的运动请求。在本公开的第1方式所涉及的管理器中,可以具备构成为存储响应性信息的存储部。在本公开的第1方式所涉及的管理器中,1个以上的处理器可以构成为从促动器系统受理响应性信息。在本公开的第1方式所涉及的管理器中,可以构成为响应性信息能够通过ota(空中下载技术)来进行更新。在本公开的第1方式所涉及的管理器中,1个以上的处理器可以构成为对于安装有adas应用功能的至少一个电子控制单元请求第2行动计划。
7.本公开的第2方式所涉及的车辆控制方法由具备1个以上的处理器、存储器以及存储装置的计算机执行。车辆控制方法包括:从安装有adas应用功能的多个电子控制单元受理多个第1行动计划;从多个电子控制单元受理比第1行动计划靠后的第2行动计划;对多个
第1行动计划进行协调;基于协调结果来计算1个以上的运动请求;以及将1个以上的运动请求分配给1个以上的促动器系统。
8.本公开的第3方式所涉及的非暂时性存储介质储存有能够由具备1个以上的处理器、存储器以及存储装置的计算机执行、且使计算机执行以下功能的命令。功能包括:从安装有adas应用功能的多个电子控制单元受理多个第1行动计划;从多个电子控制单元受理比第1行动计划靠后的第2行动计划;对多个第1行动计划进行协调;基于协调结果来计算1个以上的运动请求;以及将1个以上的运动请求分配给1个以上的促动器系统。
9.另外,本公开的第4方式所涉及的车辆具备上述管理器。
10.根据本公开,能够提供可改善促动器对于驾驶辅助系统的行动计划的响应延迟的管理器、车辆控制方法、非暂时性存储介质、以及具备管理器的车辆。
附图说明
11.以下,参照附图对本发明的示例性实施例的特征、优点、技术及工业重要性进行说明,在附图中相同的附图标记表示相同的构成要素,其中:
12.图1是表示实施方式所涉及的车辆控制系统的简要结构的框图。
13.图2是图1所示的管理器的功能框图。
14.图3a是表示参考例所涉及的促动器的控制方法的图。
15.图3b是表示参考例所涉及的促动器的控制方法的图。
16.图3c是表示参考例所涉及的促动器的控制方法的图。
17.图3d是表示参考例所涉及的促动器的控制方法的图。
18.图4a是表示实施方式所涉及的管理器进行的促动器的控制方法的图。
19.图4b是表示实施方式所涉及的管理器进行的促动器的控制方法的图。
20.图4c是表示实施方式所涉及的管理器进行的促动器的控制方法的图。
21.图4d是表示实施方式所涉及的管理器进行的促动器的控制方法的图。
22.图5是表示实施方式所涉及的管理器进行的控制处理的流程图。
具体实施方式
23.图1是表示实施方式所涉及的车辆控制系统的简要结构的框图。
24.图1所示的车辆控制系统是用于控制车辆的运动的系统,具备多个ecu1a~1c、管理器10以及促动器系统2及3。
25.ecu1a~1c是安装有adas(advanced driver assistance system:先进驾驶辅助系统)应用功能的电子控制单元,是通过执行adas应用来实现自动驾驶、自动驻车、自适应巡航控制、车道保持辅助、碰撞减轻制动等车辆的驾驶辅助功能的装置。ecu1a~1c具有cpu等处理器、存储器以及存储adas应用的非易失性存储器。为了执行各种车辆控制功能,ecu1a~1c将第1行动计划、比第1行动计划靠后的将来的行动计划亦即第2行动计划输出至管理器10。行动计划例如包括前后加速度(请求加速度)作为表示车辆的前后方向的运动的信息。另外,行动计划可以包括表示车辆的横向的运动的信息,作为表示横向的运动的信息,能够使用转向角、横摆率、曲率半径等。此外,在图1中为了简化说明,示出了3个ecu1a~1c,但安装有adas应用功能的ecu的数量并不限定,可以为2个以下或者4个以上。
26.管理器10协调从ecu1a~1c输出的行动计划,基于协调结果来向至少1个促动器系统2、3分配运动请求。管理器10包括1个以上处理器,可以构成为与其他ecu独立的ecu,也可以被搭载于其他任一个ecu,还可以与其他任一个ecu构成一体。管理器10的详细情况将后述。
27.促动器系统2包括动力总成(pt)以及控制动力总成的动力总成ecu。动力总成ecu基于从管理器10输出的运动请求来控制使动力总成产生的制动驱动力。其中,在本说明书中,“制动驱动力”作为制动力与驱动力的统称来使用。制动力是负的驱动力。
28.促动器系统3包括制动器(brk)以及控制制动器的制动器ecu。制动器ecu基于从管理器10输出的运动请求来控制使制动器产生的制动力。
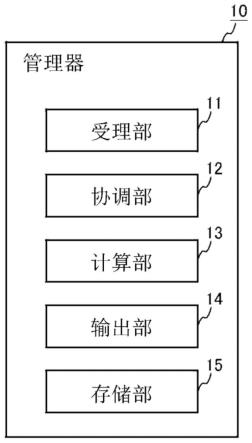
29.图2是图1所示的管理器的功能框图。
30.管理器10具备受理部11、协调部12、计算部13、输出部14以及存储部15。
31.受理部11从ecu1a~1c受理第1行动计划和比第1行动计划靠后的第2行动计划。受理部11能够受理多个第1行动计划以及多个第2行动计划。
32.协调部12对受理部11受理到的多个第1行动计划以及多个第2行动计划进行协调。作为协调处理,协调部12例如基于规定的选择基准来从受理到的多个行动计划之中选择1个行动计划、或基于受理到的多个行动计划来设定控制的允许范围。
33.计算部13基于协调部12的协调结果来计算对于促动器系统2及3的一方或者双方的运动请求。例如,计算部13使用通过协调而选择出的第1行动计划所包括的前后加速度(请求加速度)来计算动力总成的目标驱动力以及制动器的目标制动力。计算部13也可以计算驱动轴的目标驱动转矩来代替目标驱动力,还可以计算制动器的制动转矩来代替目标制动力。在计算用于实现作为第1行动计划而受理到的请求加速度的运动请求(目标制动驱动力)时,计算部13进行前馈(ff)控制以及反馈(fb)控制。计算部13通过使用基于请求加速度而计算出的目标制动驱动力作为ff项、并还考虑fb项来计算输出至促动器系统2以及/或者3的目标制动驱动力。
34.输出部14将由计算部13计算出的运动请求分配给促动器系统2及3的至少一方。输出部14基于受理部11受理到的第1行动计划以及第2行动计划来对是否需要为了实现第2行动计划而切换促动器系统的动作状态进行判定。例如,输出部14基于作为第1行动计划而受理到的请求加速度与作为第2行动计划而受理到的最终请求加速度的差异、请求加速度以及最终请求加速度各自的符号来判定动力总成促动器系统产生驱动力的状态与不产生驱动力的状态(包括产生制动力的状态)之间的切换的需要与否、制动促动器系统产生制动力的状态与不产生制动力的状态之间的切换的需要与否。在需要切换促动器系统的动作状态的情况下,输出部14预先对于需要切换动作状态的促动器系统输出计算部13计算出的运动请求。输出部14进行的处理的详细情况将后述。
35.存储部15存储促动器系统2及3各自的响应性信息。响应性信息例如是各促动器系统的响应延迟时间dt。响应延迟时间dt能够定义为从向各促动器系统输出运动请求(目标制动驱动力)起直至产生制动驱动力为止的时间。响应延迟时间dt可以是按每个车型预先通过实验等求出的值,也可以是一样的固定值,还可以被保持为与其他参数建立了关联的映射。
36.图3a~图3d是表示参考例所涉及的促动器系统的控制方法的图。
37.图3a表示从安装有adas应用功能的ecu作为行动计划而输出的请求加速度的随时间变化。在图3a的例子中,车辆的请求加速度在时刻t2转变为正,在时刻t3达到最终请求加速度。
38.图3b表示用于实现图3a所示的行动请求的目标制动力(负的驱动力)的随时间变化。与请求加速度的增加对应,目标制动力如图3b所示在时刻t1~时刻t2线性减少,在时刻t2以后,目标制动力为零。
39.图3c表示用于实现图3a所示的行动请求的目标制动驱动力的随时间变化。在图3c中,短虚线表示基于请求加速度计算的目标制动驱动力(ff项),长虚线表示考虑了ff项以及fb项的目标驱动力(向促动器系统的输出值)。
40.设想在因燃油切断的执行等而使得动力总成促动器系统的产生驱动力为没有踩踏加速踏板时的驱动力(以下,称为“加速器全闭驱动力”)以下的状态下产生了比加速器全闭驱动力大的目标驱动力的情况。由于动力总成促动器系统的响应性差,所以相对于长虚线所示的目标驱动力,动力总成促动器系统的驱动力(实线)的产生发生响应延迟时间dt量的延迟。若因动力总成促动器系统的响应延迟而导致产生驱动力不足,则由于通过反馈控制将目标驱动力调整得高,所以此后动力总成促动器系统的产生驱动力突然增加。若动力总成促动器系统的产生驱动力骤增,则由于目标驱动力会被调整得低,所以此后动力总成促动器系统的产生驱动力延迟而减少。以后,伴随着反馈控制,目标驱动力(长虚线)以及产生驱动力(实线)交替地反复增减。
41.其结果是,如图3d所示,对于从adas应用作为行动请求而输出的请求加速度,产生车辆的实际加速度的增减,由于实际加速度的收敛需要时间,所以存在导致乘坐舒适性变化的可能性。
42.与此相对,由于本实施方式所涉及的管理器10能够从ecu1a~1c受理第1行动计划以及比第1行动计划靠后的第2行动计划,所以能够使用第1行动计划以及第2行动计划来实现促动器系统的响应延迟的改善。管理器10基于第1行动计划和比第1行动计划靠后的将来的行动计划亦即第2行动计划来对是否存在需要切换动作状态的促动器系统进行判定。在存在需要切换动作状态的促动器系统的情况下,管理器10通过预先输出对于需要切换动作状态的促动器系统的运动请求,来消除切换对象的促动器系统的响应延迟。以下,参照图4a~图4d对本实施方式所涉及的管理器10的控制进行说明。
43.图4a~图4d是表示实施方式所涉及的管理器进行的促动器系统的控制方法的图。
44.图4a表示管理器10的受理部11作为第1行动计划而受理的请求加速度的随时间变化与作为第2行动计划而受理的最终请求加速度。在图4a的例子中,与图3a的例子同样,车辆的请求加速度在时刻t2转变为正,在时刻t3达到最终请求加速度。第2行动计划只要比第1行动计划靠后规定时间即可,第1行动计划与第2行动计划的时间差能够适当地设定。例如,管理器10的受理部11能够在时刻t受理请求加速度a作为第1行动计划,并且受理时刻t3的最终请求加速度a’作为比第1行动计划靠后时间t的第2行动计划。
45.图4b表示用于实现图4a所示的行动请求的目标制动力(负的驱动力)的随时间变化。与请求加速度的增加对应,目标制动力如图4b所示在时刻t1~时刻t2线性减少,在时刻t2以后,目标制动力为零。
46.图4c表示用于实现图4a所示的行动请求的目标驱动力的随时间变化。在图4c中,
细实线表示基于请求加速度计算的目标驱动力(ff项)。用短虚线表示的目标驱动力(ff项/提前)是将基于请求加速度计算的目标驱动力(ff项)比目标驱动力(ff项)提前规定时间的驱动力。换言之,短虚线的目标驱动力(ff项/提前)相当于将细实线的目标驱动力(ff项)向横轴负方向移动了规定时间。长虚线表示对目标驱动力(ff项/提前)考虑了fb项的目标驱动力。
47.管理器10的计算部13基于第1行动计划来计算基于请求加速度的目标驱动力(ff项)(图4c的细实线)。为了实现图4a所示的最终请求加速度,需要使动作状态从动力总成促动器系统产生制动力的状态向产生驱动力的状态变化。鉴于此,管理器10的输出部14对于响应性差的动力总成促动器系统将计算部13计算出的目标驱动力提前促动器系统的响应延迟时间dt(图4c的短虚线所示的目标驱动力(ff项/提前))。当在因燃油切断的执行等而动力总成促动器系统的产生驱动力为加速器全闭驱动力以下的状态下产生了比加速器全闭驱动力大的目标驱动力的情况下,由于动力总成促动器系统的响应性差,所以动力总成促动器系统的驱动力的产生发生延迟。然而,输出至动力总成促动器系统的目标驱动力(长虚线的目标驱动力(ff项+fb项))是根据将基于请求驱动力计算的目标驱动力(ff项)靠前移动规定时间而得的目标驱动力(ff项/提前)而计算的,预先考虑了动力总成促动器系统的响应延迟时间dt。因此,能够减少产生驱动力(粗实线)相对于基于请求加速度而计算的目标驱动力(ff项)的不足。通过该控制,由于动力总成促动器系统的产生驱动力与目标驱动力的差变小,所以能够抑制伴随着反馈控制的动力总成促动器系统的产生驱动力的增减。
48.其结果是,如图4d所示,由于对于从adas应用作为第1行动请求而输出的请求加速度,能够抑制车辆的实际加速度的增减、改善实际加速度的收敛性,所以能够使乘坐舒适性提高。
49.图5是表示实施方式所涉及的管理器进行的控制处理的流程图。在adas应用功能的执行中反复执行图5的控制处理。
50.在步骤s1中,受理部11从ecu1a~1c受理作为第1行动计划的请求加速度和作为第2行动计划的最终请求加速度。若受理部11受理到第1行动计划以及第2行动计划,则协调部12进行协调处理,计算部13基于协调结果来计算对于促动器系统2及3的运动请求。然后,进入至步骤s2。
51.在步骤s2中,计算部13对请求加速度与最终请求加速度是否存在差异进行判定。在步骤s2中,当请求加速度以及最终请求加速度的差异为规定的阈值以上的情况下,输出部14可以判定为存在差异。在步骤s2的判定为“是”的情况下,处理进入至步骤s3,在除此以外的情况下,处理进入至步骤s7,计算与请求加速度对应的目标制动驱动力。
52.在步骤s3中,计算部13对是否需要切换促动器系统2或者3的动作状态进行判定。该判定例如能够基于请求加速度以及最终请求加速度的差异、符号的相同性来进行。在步骤s3的判定为“是”的情况下,处理进入至步骤s4,在除此以外的情况下,处理进入至步骤s7。此外,有时在步骤s2的判定前已经执行了步骤s4以及s6的处理。因此,当在步骤s2中判定为“否”的情况下,可以进入至步骤s7。
53.在步骤s4中,计算部13对于是否达到比第2时刻靠前的第1时刻进行判定。第2时刻是请求加速度达到最终请求加速度的预测时刻。第1时刻是比第2时刻靠前促动器系统的响
应延迟时间(dt)的时刻。即,促动器系统的响应延迟时间(dt)是第1时刻与第2时刻的差。在步骤s4的判定为“是”的情况下,处理进入至步骤s7,在除此以外的情况下,处理进入至步骤s5。
54.在步骤s5中,计算部13计算目标制动驱动力(ff项/提前),该目标制动驱动力(ff项/提前)是将在步骤s1中由计算部13计算出的运动请求(目标制动驱动力的ff项)从基于请求加速度而确定的动作状态的切换预测时刻向前移动规定时间而得的。规定时间可以使用上述的促动器系统的响应延迟时间dt。然后,处理进入至步骤s6。
55.在步骤s6中,计算部13计算对在步骤s5或者步骤s7中计算出的目标制动驱动力还考虑了fb项而得的输出用的目标制动驱动力。输出部14将计算部计算出的目标制动驱动力输出至需要动作状态的切换的促动器系统,并结束本流程图的处理。
56.通过进行图5所示的控制处理,由此在基于请求加速度以及最终请求加速度判定为有需要动作状态的切换的促动器系统的情况下,能够还考虑促动器系统的动作延迟来预先输出目标制动驱动力。由此,能够使实际加速度相对于请求加速度的追随性提高,抑制乘坐舒适性的劣化。
57.如以上说明那样,本实施方式所涉及的管理器10从安装有adas应用功能的ecu1a~1c受理第1行动计划以及比第1行动计划靠后的第2行动计划。由此,由于管理器10能够掌握将来的行动计划,所以能够进行还考虑了促动器系统的响应延迟的控制。
58.另外,在有需要动作状态的切换的促动器系统的情况下,输出部14预先输出对于该需要动作状态的切换的促动器系统的运动请求。由此,即便在需要动作状态的切换的促动器系统的响应性差的情况下,也能够抑制因促动器系统引起的制动驱动力的产生延迟。
59.另外,输出部14基于作为第2行动计划而受理到的将来的请求加速度(最终请求加速度)来预先输出对于需要动作状态的切换的促动器系统的运动请求。由此,能够抑制输出超过了将来的行动计划亦即第2行动计划的运动请求。
60.另外,输出部14基于需要动作状态的切换的促动器系统的响应性信息来控制对于需要动作状态的切换的促动器系统预先输出运动请求的时机。由此,能够根据促动器系统的动作特性来适当地抑制响应延迟。
61.(其他变形例)
62.在上述的实施方式中,对管理器所具有的存储部中存储有响应性信息的例子进行了说明,但也可以设置从促动器系统受理响应性信息的第2受理部。第2受理部从促动器系统受理到的响应性信息可以存储于存储部。
63.另外,在使管理器所具有的存储部存储响应性信息的情况下,可以是能够通过ota(over the air)来更新存储部的响应性信息。例如,可考虑通过ota来更新促动器系统的ecu所具有的软件、实现功能改善。在促动器系统的响应性因促动器系统的软件的更新而变化的情况下,可以还更新存储于管理器的存储部的响应性信息。该情况下,可以通过管理器与中心的服务器进行通信来下载更新数据,也可以通过控制车辆整体的软件更新的ota控制器与服务器进行通信来下载更新数据并由ota控制器将更新数据转送至管理器。
64.另外,在上述的实施方式中,以安装有adas应用功能的ecu将第1行动计划以及比第1行动计划靠后的第2行动计划输出至管理器的例子进行了说明。在安装有adas应用功能的ecu未被设计为主动地输出将来的行动计划亦即第2行动计划的情况下,可以在管理器设
置对于安装有adas应用功能的电子控制单元请求第2行动计划的输出部(第2输出部)。
65.上述的实施方式中例示的管理器的功能还能够实现为由具备1个以上的处理器(cpu)、存储器以及存储装置的计算机执行的车辆控制方法、使该计算机执行的车辆控制程序、存储有车辆控制程序的计算机可读取的非暂时性存储介质。
66.本公开能够在用于控制促动器系统的管理器以及具备该管理器的车辆中利用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1