一种基于驾驶行为预测的辅助驾驶控制方法
1.本技术涉及智能驾驶技术领域,尤其涉及一种基于驾驶行为预测的辅助驾驶控制方法。
背景技术:
2.随着计算机、传感、控制等技术的快速发展,自动驾驶汽车得到了快速的发展,但目前工业界主流的自动驾驶水平仍然集中于l2-l3级别,致力于以人为主导,自动控制技术为辅,实现人机协同驾驶。因此,对驾驶员的驾驶行为进行预测,为先进辅助驾驶系统提供未来驾驶员的可能操纵行为数据,再通过共享控制器进行辅助驾驶,有利于提升智能汽车的驾驶舒适性。
3.据调查研究显示,当前市面上的车辆装载辅助系统只限于安全碰撞预警系统,原理是通过传感器感知周围障碍物的距离来进行碰撞预警,此类预警系统只考虑了车辆驾驶过程中的外在环境因素,使得预警不具备全面性和灵活性。然而驾驶是驾驶员主导的行为,预警系统的提示对象也是驾驶员,所以一个完备的驾驶辅助系统必须考虑驾驶员在驾驶过程中的操作意图,如果安全驾驶辅助系统没有考虑操作意图的因素,系统将会出现错误预估驾驶状态而频繁误报的情形,这会极大地干扰驾驶员的精神状态,降低驾驶员对辅助系统的信任能力。因此,提前预测驾驶员的未来时刻的驾驶操作,对先进驾驶辅助系统的实用性和安全性的提升以及增强人机之间的信任有重要意义。
4.在人机共享转向控制研究中,基于模型预测的控制方法是一种常见的控制算法,但是驾驶员驾驶行为难以用模型精确预测,常用的驾驶员模型应用场景也比较局限。目前尚无轻量级车载系统可预测驾驶员短期行为,因此,一种基于驾驶行为预测的辅助驾驶控制方法存在广泛需求与硬件基础。
技术实现要素:
5.本技术提供了一种基于驾驶行为预测的辅助驾驶控制方法,其技术目的是对驾驶员行为进行预测,从而实现对辅助驾驶的控制,提高人机之间的信任度和适应性,增强驾驶舒适性。
6.本技术的上述技术目的是通过以下技术方案得以实现的:
7.一种基于驾驶行为预测的辅助驾驶控制方法,包括:
8.通过传感器获取纵向变量、横向变量和跟车变量的数据;
9.将所述纵向变量、横向变量和跟车变量的数据输入到ltsmnn预测模型,对驾驶员未来的驾驶操纵行为进行预测,得到预测结果;其中,所述预测结果包括油门预测量和转向角预测量;
10.将所述预测结果传递给纵向-横向耦合的人机共享模型预测控制器,所述纵向-横向耦合的人机共享模型预测控制器根据车辆稳定性、驾驶舒适性、路径跟踪性、跟车安全性及电机节能性,实现分层协调控制,提供车速补偿和转向补偿;
11.根据所述车速补偿和所述转向补偿实现对辅助驾驶的控制;
12.其中,所述纵向变量包括历史纵向加速度时间序列、历史纵向速度时间序列和历史油门时间序列;所述横向变量包括历史横向加速度时间序列、历史横向速度时间序列、历史横向偏移时间序列、历史横摆角速度时间序列和历史转向角时间序列;所述跟车变量包括历史相对车距时间序列、历史相对车速时间序列和历史前车加速度时间序列。
13.本技术的有益效果在于:通过lstmnn预测模型对驾驶员行为进行精准预测,增强了人机协同控制车辆时的交互适应性,减少了人机冲突,提升驾驶舒适性。同时,在纵-横向耦合控制时,引入了车辆稳定性、驾驶舒适性、路径跟踪性、跟车安全性及电机节能性等多项综合指标,大幅提升了高级辅助驾驶系统的智能化水平和灵活性,整个共享控制框架可服务于先进的个性化驾驶辅助系统,使得系统具备灵活性,可以用于各类乘用车辆或商用车辆,通用性好。
附图说明
14.图1为本技术所述控制方法的流程图;
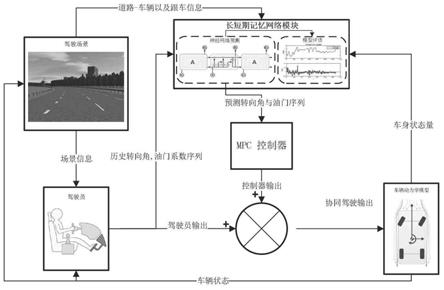
15.图2为基于驾驶行为预测的纵向-横向耦合的人机共享模型预测控制器的控制框架图;
16.图3为横向车辆动力学模型示意图。
具体实施方式
17.下面将结合附图对本技术技术方案进行详细说明。
18.本技术所述的基于驾驶行为预测的辅助驾驶的控制方法如图1所示,具体包括:
19.步骤s1:通过传感器获取纵向变量、横向变量和跟车变量的相关数据。
20.步骤s2:将所述纵向变量、横向变量和跟车变量的数据输入到ltsmnn预测模型,对驾驶员未来的驾驶操纵行为进行预测,得到预测结果。预测结果包括转向角预测量和油门预测量。
21.步骤s3:将所述预测结果传递给纵向-横向耦合的人机共享模型预测控制器,所述纵向-横向耦合的人机共享模型预测控制器根据不同的性能指标(车辆稳定性、驾驶舒适性、路径跟踪性、跟车安全性及电机节能性等),实现分层协调控制,提供车速补偿和转向补偿。
22.步骤s4:根据所述车速补偿和所述转向补偿实现对辅助驾驶的控制。
23.根据图2所示的长短时记忆网络模块驱动的驾驶员行为预测模型,即ltsmnn预测模型,以纵向变量、横向变量和跟车变量的时间序列作为输入特征,实时评价驾驶员的驾驶行为和驾驶能力,并预测驾驶员未来时刻的驾驶行为意图,即转向角预测量、油门预测量。
24.根据输入、输出的变量序列,设计了驾驶员驾驶操作连续意图预测lstmnn网络结构,实现驾驶员驾驶操纵行为的短时预测。lstmnn预测模型的输入输出定义如表1所示:
[0025][0026]
表1
[0027]
lstmnn预测模型的训练数据是通过方向盘角度传感器、车身姿态传感器及踏板传感器获取的,并根据预测时刻数目来制作样本标签。引入lstmnn预测模型对驾驶员操纵行为信息进行预测,使得驾驶员未来输入信息对于整个系统而言是一个可测量的信息,减少了模型参数摄动问题。
[0028]
结合预测结果数据集,根据如图2所示的纵向-横向耦合的人机共享模型预测控制器的控制框架,纵向-横向耦合的人机共享模型预测控制器(图2中的mpc控制器)在提供纵向速度跟踪的辅助的同时,为横向轨迹跟踪进行方向盘转向角的助力优化。
[0029]
具体地,纵向-横向耦合的人机共享模型预测控制器基于纵向-横向耦合的车辆动力学模型(图2中的车辆动力学模型)构建得到,纵向-横向耦合的车辆动力学模型由纵向车辆动力学模型和横向车辆动力学模型耦合得到。
[0030]
根据前方车辆与自车车辆位置关系作为纵向运动学建模机理,同时,引入轮毂电机的驱动输入,建立一个可以表征车辆能量消耗的纵向车辆动力学模型。具体地,纵向车辆动力学模型在跟车运动学的基础上引入电机驱动力矩和驾驶员的踏板信号,其中踏板信号和驱动力矩被近似为线性关系,则纵向车辆动力学模型表示为:
[0031][0032]
其中,d表示相对车距,v
x
表示相对车速,cd表示阻力系数,ρa表示空气密度,av表示车辆的迎风面积,t
dc
表示纵向控制模型预测控制器补偿的电机驱动力矩,t
dd
表示将驾驶员踏板闭合度转换后的电机驱动力矩,vf表示前车速度,r
t
表示轮胎半径,v(t)表示纵向车速。
[0033]
t
dd
=k*踏板闭合度,k表示可调权重系数,。
[0034]
横向车辆动力学模型基于侧向车辆二自由度动力学模型建立,引入了驾驶员的转向角输入,其人机耦合的横向车辆动力学模型如图3所示,则横向车辆动力学模型表示为:
[0035][0036]
其中,β表示车辆质心侧偏角,γ表示车辆横摆角速度,y
l
表示车辆侧向误差,φ
l
表示车辆航向角偏差,cf表示前轮侧偏刚度,cr表示后轮侧偏刚度,mz表示绕z轴的惯性矩,m表示车辆质量,lf表示前轴到质心的距离,lr表示后轴到质心的距离,ls表示前视距离,δc表示控制器补偿的前轮转向角输入,δd表示驾驶员转向意图转换的前轮转向角输入,ρ
ref
表示前方道路曲率。
[0037]
根据纵向车辆动力学模型和横向车辆动力学模型得到纵向-横向耦合的车辆动力学模型,具体表示为:
[0038][0039][0040][0041][0042]
对纵向-横向耦合的车辆动力学模型进行离散化得到:
[0043]
[0044]
其中,t表示采样时间,i表示6*6的单位矩阵。
[0045]
通过纵向车辆动力学模型构建得到纵向模型预测控制器,通过横向车辆动力学模型构建得到横向路径跟踪模型预测控制器。
[0046]
纵向模型预测控制器的代价函数表示为:
[0047][0048]
并根据从车安全性、驾驶舒适性以及驱动电机节能性对式(5)作出约束,表示为:
[0049][0050]
其中,d
ref
表示距前方车辆的期望安全车距,q1表示纵向模型预测控制器状态量的可调系数矩阵,r1表示纵向模型预测控制器的补偿输入可调系数矩阵,n
p
表示预测时域,k表示当前时刻,t表示基于当前时刻预测未来时刻的步长数,a
x
表示己方车辆的纵向加速度。
[0051]
设计的横向路径跟踪模型预测控制器的代价函数表示为:
[0052][0053]
并根据车辆稳定性和路径跟踪性能对式(7)作出约束,表示为:
[0054][0055]
其中,q2表示横向路径跟踪模型预测控制器状态量的可调系数矩阵,r2表示纵向模型预测控制器的补偿转角可调系数矩阵,表示期望轨迹偏差;且:
[0056][0057]
δf表示前轮转向角,μ表示摩擦系数;g表示重力加速度。
[0058]
最终得到纵向-横向耦合的人机共享模型预测控制器的性能函数为:
[0059]
j=w1j1+w2j2;
ꢀꢀꢀꢀꢀ
(10)
[0060]
ω1、ω2都表示权重系数,且ω1∈[0,1]、ω2∈[0,1]。ω1和ω2可以根据具体场景需求,由用户自主设定,这使得整个纵向-横向耦合的人机共享模型预测控制器更加个性化,满足不同的用户群体。需要注意的是,驾驶员未来的预测输入信号是由lstmnn预测模型传输给纵向-横向耦合的人机共享模型预测控制器,纵向-横向耦合的人机共享模型预测控制器根据预测信息,通过qp算法实时求解最优的补偿输入。
[0061]
上述仅为本技术的构思作举例说明。本技术亦可以针对具体车型、不同水平驾驶员对共享控制框架进行优化和改进,凡对本技术进行的非实质性的改动,均属于本技术保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1