一种车道合并点计算系统、方法、车辆及存储介质与流程
1.本发明属于自动驾驶的技术领域,具体涉及一种车道合并点计算系统、方法、车辆及存储介质。
背景技术:
2.随着汽车智能化的快速发展,越来越多的汽车搭载了自动驾驶系统,自动驾驶系统能够根据本车状态和周围环境状态对本车的横向和纵向速度进行控制,以实现自动驾驶。自动驾驶时除了根据定位信息从地图上获取行驶轨迹以外,针对实际车道的车道线进行行驶轨迹规划也较为重要。
3.目前的自动驾驶系统采用搭载于车辆前方的摄像头获取前方的车道线,当车辆上坡、下坡、车道收窄或合并时,很容易出现车道线丢失的情况,此时若定位信息不准确或失效,在没有高精度地图的辅助下,很难通过实时的车道线信息及时准确的预判出车道前方合并点的位置,导致自动驾驶的安全性降低。因此,需要提出一种可以使车辆在车道收窄以及合并消失的车道上能够及时识别出相应的交叉点并及时提醒驾驶员接管的方法,以提高自动驾驶的适应能力和安全性。
技术实现要素:
4.针对现有技术的上述不足,本发明要解决的技术问题是提供一种车道合并点计算系统、方法、车辆及存储介质,解决目前自动驾驶在车道线丢失的情况下难以准确识别车道合并点的问题,取得提高自动驾驶适应能力和安全性的效果。
5.为解决上述技术问题,本发明采用如下技术方案:
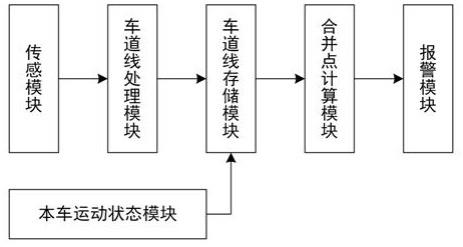
6.一种车道合并点计算系统,包括本车运动状态模块、传感模块、车道线处理模块、车道线存储模块、合并点计算模块和报警模块;
7.本车运动状态模块用于获取本车当前的运动状态信息,运动状态信息包括车速和横摆角速度;传感模块用于探测车道线并根据车道线处理得到车道线方程;车道线处理模块用于根据车道线方程将车道线转换成点;车道线存储模块用于存储当前车道线和通过航迹推移将历史车道线转换到当前车身坐标系下并存储;合并点计算模块用于通过历史车道线估算前方车道线并通过末端车道宽度计算出合并点;报警模块用于根据合并点位置及时提醒驾驶员接管车辆。
8.本发明还包括一种车道合并点计算方法,使用如上所述一种车道合并点计算系统,包括如下步骤:
9.1)传感模块持续探测车道线并根据车道线处理得到车道线方程;
10.2)车道线处理模块根据车道线方程对车道线进行离散化处理成点,构成车道线的点云;
11.3)车道线存储模块通过航迹推移将历史车道线的点云转换到当前车身坐标系下并存储;
12.4)合并点计算模块将存储的车道线的点云按纵向每隔dl米的纵向区间进行聚类求均值,然后将相应纵向区间内横向距离偏差超过d米的点筛除,再重新按纵向每隔dl米的纵向区间进行聚类求均值,估算出前方车道线的形状;
13.5)合并点计算模块筛选出每隔dl米的纵向区间内均存在均值的区间,计算出车道线对应左右两点的差值;
14.6)车道线对应左右两点的差值小于a米时,认为左右车道线合并,车道线对应左右两点的纵向距离为合并点的纵向距离,车道线对应左右两点的横向距离的均值为合并点的横向位置;
15.7)报警模块根据输入的合并点位置确定报警时间以及时提醒驾驶员接管车辆。
16.进一步地,步骤1)中所述车道线方程如下:
17.y=a0+a1
×
x+a2
×
x2+a3
×
x318.其中,y为车道线上的点在本车坐标系下的横向距离,x为车道线上的点在本车坐标系下的纵向距离,a0、a1、a2和a3均为车道线方程系数,a0为本车坐标原点处的横向位置,a1为本车坐标原点处的航向角,2倍a2为本车坐标原点处的曲率、6倍a3为本车坐标原点处的曲率变化率。
19.进一步地,步骤3)中对历史车道线进行存储时不断更新覆盖,存储的车道线仅为包含n个点的最近一段车道线。
20.进一步地,步骤3)中将历史车道线转换到当前车身坐标系下所用转换公式如下:
21.dx=v
×
t
22.dh=ω
×
t
23.x(t)=x(t-1)-dx
[0024][0025]
其中,dx为一个运算周期本车在x方向的位移量,v为本车车速,t为运算周期,ω为本车的横摆角速度,dh为本车的横摆角度,x为点云在车身坐标系下的x轴坐标,x为点云在车身坐标系下的y轴坐标。
[0026]
本发明还包括一种车辆,该车辆搭载有如上所述一种车道合并点计算系统。
[0027]
本发明还包括一种存储介质,所述存储介质内存储有计算机可读程序,所述计算机可读程序被调用时,可执行如上所述一种车道合并点计算方法的步骤。
[0028]
相比现有技术,本发明的有益效果如下:
[0029]
1、本发明所述一种车道合并点计算方法,将车道线通过车道线方程转换成点,利用历史车道线信息估算出本车车道线的实际形状,通过末端车道宽度计算出合并点,能在摄像头看到的车道线信息不稳定时依然能够准确识别出合并点位置,提前提醒驾驶员接管,提高驾驶安全感。
[0030]
2、本发明所述一种车道合并点计算方法,使用历史车道线信息进行车道合并状态估计,对比目前主流的仅使用实时检测到车道线判断或者判断后进行多帧校验的方式,可有效提升计算的准确性。
附图说明
[0031]
图1为实施例的一种车道合并点计算系统结构框图;
[0032]
图2为实施例的一种车道合并点计算方法流程图;
具体实施方式
[0033]
下面结合附图对本发明的具体实施方式作进一步的详细说明。
[0034]
实施例:
[0035]
请参见图1,一种车道合并点计算系统,包括依次电连接的传感模块、车道线处理模块、车道线存储模块、合并点计算模块和报警模块;还包括本车运动状态模块,本车运动状态模块与车道线存储模块电连接;
[0036]
本车运动状态模块用于获取本车当前的运动状态信息,运动状态信息包括车速和横摆角速度;传感模块用于探测车道线并根据车道线处理得到车道线方程;车道线处理模块用于根据车道线方程将车道线转换成点;车道线存储模块用于存储当前车道线和通过航迹推移将历史车道线转换到当前车身坐标系下并存储;合并点计算模块用于通过历史车道线估算前方车道线并通过末端车道宽度计算出合并点;报警模块用于根据合并点位置及时提醒驾驶员接管车辆。
[0037]
请参见图2,本发明还包括一种车道合并点计算方法,使用如上所述一种车道合并点计算系统,包括如下步骤:
[0038]
1)传感模块持续探测车道线并根据车道线处理得到车道线方程;所述车道线方程如下:
[0039]
y=a0+a1
×
x+a2
×
x2+a3
×
x3[0040]
其中,y为车道线上的点在本车坐标系下的横向距离,x为车道线上的点在本车坐标系下的纵向距离,a0、a1、a2和a3均为车道线方程系数,a0为本车坐标原点处的横向位置,a1为本车坐标原点处的航向角,2倍a2为本车坐标原点处的曲率、6倍a3为本车坐标原点处的曲率变化率。
[0041]
2)车道线处理模块根据车道线方程对车道线进行离散化处理成点,构成车道线的点云;
[0042]
3)车道线存储模块通过航迹推移将历史车道线的点云转换到当前车身坐标系下并存储;
[0043]
本实施例中,车道线存储模块对历史车道线进行存储时,同时进行更新覆盖,存储的车道线仅为包含n个点的最近一段车道线;
[0044]
将历史车道线的点云转换到当前车身坐标系下所用转换公式如下:
[0045]
dx=v
×
t
[0046]
dh=ω
×
t
[0047]
x(t)=x(t-1)-dx
[0048][0049]
其中,dx为一个运算周期本车在x方向的位移量,v为本车车速,t为运算周期,ω为本车的横摆角速度,dh为本车的横摆角度,x为点云在车身坐标系下的x轴坐标,x为点云在
车身坐标系下的y轴坐标。
[0050]
4)合并点计算模块将存储的车道线的点云按纵向每隔dl米的纵向区间进行聚类求均值,然后将相应纵向区间内横向距离偏差超过d米的点筛除,再重新按纵向每隔dl米的纵向区间进行聚类求均值,估算出前方车道线的形状;
[0051]
5)合并点计算模块筛选出每隔dl米的纵向区间内均存在均值的区间,计算出车道线对应左右两点的差值;
[0052]
6)车道线对应左右两点的差值小于a米时,认为左右车道线合并,车道线对应左右两点的纵向距离为合并点的纵向距离,车道线对应左右两点的横向距离的均值为合并点的横向位置;其中,dl、d和a的取值根据本车车身尺寸和所处道路类型等因素进行确定。
[0053]
7)报警模块根据输入的合并点位置确定报警时间以及时提醒驾驶员接管车辆。
[0054]
本发明所述一种车道合并点计算方法,将探测到的车道线进行离散化处理成点,然后将车道线的点云存储并将历史车道线的点云通过坐标转换到本车当前坐标系下,对车道线的点云进行聚类剔除异常值后取均值得出估算的车道线形状,再根据估算出的车道线信息计算出合并点;根据合并点的位置确定报警时间,以提前提醒驾驶员接管,提高驾驶安全感。
[0055]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1