履带式水陆两栖车辆控制系统及控制方法
1.本发明涉及两栖车控制技术领域,尤其涉及一种履带式水陆两栖车辆控制系统及控制方法。
背景技术:
2.水陆两栖车兼具水陆双重行驶性能,可以完成水上救援、物资运输以及近海抢险登陆等功能,具有非常重要的价值。而相关技术中,当水陆两栖履带车从陆地过渡到水中时,履带底板位于水下,在水陆两栖履带车行驶过程中的行驶效率较低。另外,当水陆两栖履带车从水过渡到陆地上时,即将靠近岸边时,水陆两栖车只能简单地控制履带或推进器提供足够大的动力以完成过渡过程,但遇到岸边地形复杂时,仅仅靠推进器的推力难以将水陆两栖车推上岸边。
技术实现要素:
3.为了解决上述技术问题的至少之一,本发明提出一种履带式水陆两栖车辆控制系统及控制方法,能够有效地提高履带式水陆两栖车对特殊工况的通过能力。
4.一方面,本发明实施例提供了一种履带式水陆两栖车辆控制系统,包括:
5.举升机构,所述举升机构用于控制所述履带式水陆两栖车辆的履带机构的升降状态;
6.操作平台,所述操作平台用于获取工况信息;
7.感知模块,所述感知模块用于获取所述履带式水陆两栖车辆周围的环境数据;
8.车辆控制模块,所述车辆控制模块用于根据所述工况信息以及所述环境数据,控制所述举升机构调整所述履带机构的升降状态。
9.根据本发明实施例的一种履带式水陆两栖车辆控制系统,至少具有如下有益效果:本实施例通过设置的感知模块获取履带式水陆两栖车辆周围的环境数据。然后本实施例的车辆控制模块根据操作平台获取的工况信息以及环境数据,控制举升机构的工作状态,从而调整履带机构的升降状态。相应地,以通过控制举升机构工作状态的方式,调整履带式水陆两栖车辆的履带机构的升降状态,使得履带机构能够在水陆交界处工作过程中较好地接触到地面。本实施例通过控制举升机构来对履带机构的上升与下降进行较精确地控制,并根据环境数据对举升机构进行自适应调节,从而有效地提高了履带式水陆两栖车对特殊工况的通过能力。
10.根据本发明的一些实施例,所述举升机构包括双剪叉举升机构和卧式单缸液压中顶机构,所述双剪叉举升机构用于调整所述履带机构的伸缩状态,所述卧式单缸液压中顶机构设置于所述双剪叉举升机构上方,所述卧式单缸液压中顶机构用于调整所述履带机构的升降角度。
11.根据本发明的一些实施例,所述双剪叉举升机构包括:
12.举升机构底座,所述举升机构底座与所述履带机构连接,所述举升机构底座用于
连接所述履带机构与所述双剪叉举升机构;
13.举升机构上顶板,所述举升机构上顶板与所述卧式单缸液压中顶机构连接,所述举升机构上顶板用于固定所述卧式单缸液压中顶机构与所述双剪叉举升机构;
14.剪叉机构,所述剪叉机构设置于所述举升机构底座与所述举升机构上顶板之间,所述剪叉机构包括剪叉杆和双剪叉液压缸,所述双剪叉液压缸用于控制所述剪叉杆调整所述剪叉机构的伸缩状态。
15.根据本发明的一些实施例,所述卧式单缸液压中顶机构包括:
16.卧式单缸上顶架,所述卧式单缸上顶架与所述履带式水陆两栖车车身固定连接,所述卧式单缸上顶架设置有卧式单缸上顶架第一连接端、卧式单缸上顶架第二连接端和卧式单缸上顶架第三连接端,所述卧式单缸上顶架第一连接端通过上顶架联结销轴与所述举升机构上顶板固定铰接;
17.单顶液压缸,所述单顶液压缸设置有单顶液压缸第一连接端和单顶液压缸第二连接端,所述单顶液压缸第一连接端与所述卧式单缸上顶架第二连接端固定铰接;
18.中顶机构三角板,所述中顶机构三角板设置有三角板第一连接端、三角板第二连接端和三角板第三连接端,所述三角板第二连接端与所述举升机构上顶板固定铰接,所述三角板第一连接端与所述单顶液压缸第二连接端连接;
19.支撑杆联接法兰,所述支撑杆连接法兰设置有支撑杆连接法兰第一连接端和支撑杆连接法兰第二连接端,所述支撑杆连接法兰第一连接端与所述卧式单缸上顶架第三连接端固定铰接,所述支撑杆连接法兰第二连接端与所述三角板第三连接端固定铰接。
20.根据本发明的一些实施例,所述感知模块包括:
21.回声探测仪,所述回声探测仪与所述车辆控制模块连接,所述回声探测仪液压检测所述履带式水陆两栖车所在位置的水深数据;
22.摄像头模块,所述摄像头模块用于获取所述履带式水陆两栖车周围的路面图像;
23.雷达模块,所述雷达模块用于检测所述履带式水陆两栖车与障碍物的距离;
24.北斗定位模块,所述北斗定位模块用于获取所述履带式水陆两栖车的定位信息。
25.另一方面,本发明实施例还提供了一种履带式水陆两栖车辆控制方法,包括:
26.获取履带式水陆两栖车周围的环境数据;
27.获取所述履带式水陆两栖车的工况信息;
28.根据所述环境数据和所述工况信息控制举升机构调整履带机构的升降状态。
29.根据本发明的一些实施例,所述获取履带式水陆两栖车周围的环境数据,包括:
30.获取所述履带式水陆两栖车周围的水深数据、路面图像、障碍物距离以及定位信息。
31.根据本发明的一些实施例,所述工况信息包括水上航行工况和水陆交界登陆工况;
32.所述根据所述环境数据和所述工况信息控制举升机构调整履带机构的升降状态,包括:
33.当确定所述工况信息为水上航行工况,根据所述水深数据确定所述履带式水陆两栖车的当前位置水深数据大于预设浮起水面高度,控制所述举升机构收缩;
34.或者,
35.当确定所述工况信息为水陆交界登陆工况,根据所述水深数据确定所述履带式水陆两栖车的当前位置水深数据小于预设浮起水面高度,根据所述环境数据调整所述举升机构的升降距离以及升降角度。
36.根据本发明的一些实施例,在执行所述根据所述环境数据和所述工况信息调整所述举升机构工作状态这一步骤之后,所述方法还包括:
37.获取所述履带式水陆两栖车的工作模式;所述工作模式包括坡道起步模式以及坡道驻车模式;
38.根据所述工作模式对所述履带式水陆两栖车进行受力分析,得到受力分析结果;
39.根据所述受力分析结果计算得到所述履带式水陆两栖车的总需求转矩;
40.根据所述总需求转矩调整所述履带式水陆两栖车的工作状态。
41.根据本发明的一些实施例,所述根据所述受力分析结果计算得到所述履带式水陆两栖车的总需求转矩,包括:
42.构建前馈补偿器;
43.根据所述前馈补偿器通过所述履带式水陆两栖车的行驶阻力和液压制动转矩的差值,得到前馈补偿力矩。
附图说明
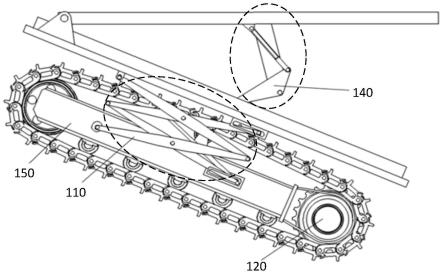
44.图1是本发明实施例提供的履带式水陆两栖车辆举升机构工作示意图;
45.图2是本发明实施例提供的履带式水陆两栖车辆举升机构示意图;
46.图3是本发明实施例提供的履带式水陆两栖车辆举升机构正视图;
47.图4是本发明实施例提供的履带式水陆两栖车辆举升机构工作的车辆整体示意图;
48.图5是本发明实施例提供的履带式水陆两栖车辆举升机构收缩的车辆整体示意图;
49.图6是本发明实施例提供的履带式水陆两栖车辆控制方法流程图。
具体实施方式
50.本技术实施例所描述的实施例不应视为对本技术的限制,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
51.在以下的描述中,涉及到“一些实施例”,其描述了所有可能实施例的子集,但是可以理解,“一些实施例”可以是所有可能实施例的相同子集或不同子集,并且可以在不冲突的情况下相互结合。
52.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中所使用的术语只是为了描述本技术实施例的目的,不是旨在限制本技术。
53.水陆两栖车辆具有水、陆双重行驶性能,能够完成水上救援以及近海抢险登陆等功能,因此水陆两栖车的发展具有非常重要的价值。而现有的履带式水陆两栖车,在水陆两栖车处于水陆过渡状态时,由于履带处的底盘固定,难以适应地理环境复杂的登陆环境,这也大大降低了水陆两栖车辆的行驶效率。另外,当履带式水陆两栖车从陆地过渡到水中时,
履带底板位于水下,在履带式水陆两栖车行驶过程中,增加了履带式水陆两栖车的行驶阻力,降低了履带式水陆两栖车的行驶效率。而在履带式水陆两栖车从水面过渡到陆地过程中,当快靠近岸边时,通常履带式水陆两栖车辆通过简单地控制履带或推进器提供足够大的动力从而完成过渡过程。当碰到岸边地形环境复杂时,履带难以获得较好的抓地力从而增加行驶力,并且单靠推进器产生推力也难以将水陆两栖车辆推上岸边。
54.基于此,本发明实施例提供一种履带式水陆两栖车辆控制系统,能够通过对履带的上升与下降进行较精确地控制,并对相应的环境进行自适应调节,有效地提高了履带式水陆两栖车对特殊工况的通过能力。本发明实施例提供的履带式水陆两栖车辆控制系统包括:举升机构、操作平台、感知模块以及车辆控制模块。具体地,举升机构用于控制履带式水陆两栖车辆的履带机构的升降状态。操作平台用于获取履带式水陆两栖车的工况信息。感知模块用于获取履带式水陆两栖车辆周围的环境数据。同时,车辆控制模块则根据操作平台获取的工况信息和感知模块获取的环境数据,控制举升机构工作,从而调整履带式水陆两栖车辆的履带机构的升降状态。本实施例的控制系统首先通过设置的感知模块获取水陆两栖车辆周围的环境数据。然后车辆控制模块根据操作平台获取的车辆工况信息以及感知模块反馈的环境数据,判断当前履带式水陆两栖车辆的履带机构是否能够较好地接触地面,并根据工况信息以及环境数据控制举升机构工作,从而较为精确地控制履带机构的升降状态。
55.在本具体实施例中,本实施例首先通过操作平台获取到履带式水陆两栖车的工况信息。例如当前履带式水陆两栖车的工况为从水面到陆地登陆过程的水陆交接登陆工况,或者从陆地向水面转换的水上航行工况等。然后本实施例通过感知模块对履带式水陆两栖车辆周围的环境数据进行获取。例如,通过感知模块获取水陆两栖车辆下方的地形环境信息。进一步地,本实施例的车辆控制模块根据获取的履带式水陆两栖车的工况信息以及周围的环境数据,控制举升机构工作,以举升机构的升降带动履带式水陆两栖车的履带机构的升降,使履带机构能够较好的接触地面,从而使履带式水陆两栖车能够对相应的环境进行自适应调节,有效地提高了履带式水陆两栖车对特殊工况的通过能力。例如,当履带式水陆两栖车在地形较为复杂的环境中进行登陆时,本实施例通过感知模块对履带式水陆两栖车周围的环境数据进行采集,通过反馈的环境数据控制举升机构调整履带机构的位置。如履带式水陆两栖车当前位置的水较深,并且水底地面的坡度也较陡峭时,常规的水陆两栖车辆履带机构往往不能够较好地接触地面而获得较好的抓地力,此时,本实施例通过感知模块获取履带式水陆两栖车辆周围的环境数据,并根据当前的工况信息以及环境数据分析得到当前举升机构的期望举升距离和举升角度,从而控制举升机构进行工作,带动履带机构调整到相应的工作位置,从而使得履带机构能够更好地与地面接触,让履带式水陆两栖车获得更好的抓地力,从而有效地提高了履带式水陆两栖车对特殊工况或地形的通过能力。
56.在本发明的一些实施例中,参照图1,举升机构包括双剪叉举升机构110和卧式单缸液压中顶机构140,双剪叉举升机构110用于调整履带机构120的伸缩状态,卧式单缸液压中顶机构140设置于双剪叉举升机构上方,卧式单缸液压中顶机构140用于调整所述履带机构120的升降角度。具体地,本实施例通过操作平台获取当前工况信息,并通过感知模块获取当前履带式水陆两栖车辆周围的环境数据后,车辆控制模块根据获取的工况信息以及环
境数据,控制举升机构调整履带机构120的升降状态包括控制双剪叉举升机构110的升降调整履带机构120的升降,使履带机构120自适应地与地面接触,同时,控制卧式单缸液压中顶机构140的工作状态调整履带机构120的升降角度,使履带机构120以较好的角度与地面接触,从而使履带式水陆两栖车辆获得更好的抓地力。本实施例通过双剪叉举升机构110对履带机构120的升降进行较为精确的控制,并结合卧式单缸液压中顶机构140调节履带机构120的升降角度,使得履带式水陆两栖车辆能够自适应地根据环境进行自适应调节,有效地提高了履带式水陆两栖车对特殊工况的通过能力。
57.在本发明的一些实施例中,参照图1和图2,双剪叉举升机构110包括:举升机构底座150、举升机构上顶板240以及剪叉机构。具体地,举升机构底座150与履带机构120连接,举升机构底座150将履带机构120与双剪叉举升机构110固定连接,从而通过控制双剪叉举升机构110调整履带机构120的升降状态。同时,举升机构上顶板240与卧式单缸液压中顶机构140连接,举升机构上顶板将卧式单缸液压中顶机构140与双剪叉举升机构110固定连接。另外,剪叉机构设置于举升机构底座150与举升机构上顶板240之间,举升机构上顶板240上设置有举升机构上顶架230,剪叉机构包括剪叉杆和双剪叉液压缸。本实施例通过双剪叉液压缸控制剪叉杆调整剪叉机构的伸缩状态。
58.需要说明的是,参照图2,在本发明的一些实施例中,剪叉杆包括第一剪叉杆261、第二剪叉杆262、第三剪叉杆263以及第四剪叉杆264。其中,双剪叉液压缸265设置于第二剪叉杆262和第四剪叉杆264之间。具体地,第一剪叉杆261和第二剪叉杆262之间通过剪叉杆联结销轴266活动交叉连接,第三剪叉杆263和第四剪叉杆264之间也通过剪叉杆联结销轴266活动交叉连接。同时,第一剪叉杆261的第一连接端与举升机构底座150固定铰接,第一剪叉杆261的第二连接端与第三剪叉杆263的第二连接端活动连接。第二剪叉杆262的第一连接端与举升机构底座150的滑动支座220滑动连接,第二剪叉杆262的第二连接端与第四剪叉杆264的第一连接端活动连接。另外,第三剪叉杆263的第一连接端通过第二固定铰支座210与举升机构上顶板240连接,第四剪叉杆264的第二连接端也与举升机构上顶板240连接。另外,双剪叉液压缸265的第一连接端与举升机构底座150的活动支座滑动连接,双剪叉液压缸265的第二连接端与第四剪叉杆264滑动连接。本实施例中,双剪叉举升机构110通过液压机构进行举升,并利用液控单向阀的锁紧回路来实现双剪叉液压缸的锁止。
59.在本发明的一些实施例中,参照图2和图3,本实施例的卧式单缸液压中顶机构140包括:卧式单缸上顶架255、单顶液压缸254、中顶机构三角板252以及支撑杆联接法兰253。具体地,卧式单缸上顶架255与水陆两栖车车身固定连接,卧式单缸上顶架255设置有卧式单缸上顶架第一连接端、卧式单缸上顶架第二连接端和卧式单缸上顶架第三连接端,卧式单缸上顶架第一连接端通过上顶架联结销轴330以及第一固定铰支座251与举升机构上顶板固定铰接。单顶液压缸254设置有单顶液压缸第一连接端和单顶液压缸第二连接端,单顶液压缸第一连接端与卧式单缸上顶架第二连接端固定铰接。中顶机构三角板252设置有三角板第一连接端、三角板第二连接端和三角板第三连接端,三角板第二连接端与举升机构上顶板240固定铰接,三角板第一连接端与单顶液压缸第二连接端连接。支撑杆联接法兰253设置有支撑杆连接法兰第一连接端和支撑杆连接法兰第二连接端,支撑杆连接法兰第一连接端与卧式单缸上顶架第三连接端固定铰接,支撑杆连接法兰第二连接端与三角板第三连接端固定铰接。本实施例中,卧式单缸液压中顶机构140通过液压机构进行举升,并利
用液控单向阀的锁紧回路来实现液压缸的锁止。
60.需要说明的是,参照图3,在本发明的一些实施例中,中顶机构三角板252设置有两块,并且两块中顶机构三角板252对称设置,两块中顶机构三角板252的三角板第二连接端均通过上顶板第三固定铰支座310与举升机构上顶板240固定铰接。相应地,与两块中顶机构三角板分别对应设置有两个支撑杆联接法兰253,两个支撑杆联接法兰253的支撑杆连接法兰第一连接端均与卧式单缸上顶架255固定铰接,两个支撑杆联接法兰253的支撑杆连接法兰第二连接端分别与两块中顶机构三角板252的三角板第三连接端固定铰接。同时,两块中顶机构三角板252的三角板第一连接端之间通过单顶液压缸联接轴320连接,并且单顶液压缸第二连接端通过单顶液压缸联接轴320与三角板第一连接端连接。
61.需要说明的是,在本发明的一些实施例中,举升机构上顶板240的长度大于履带机构120的纵向轴距,并且举升机构上顶板240的宽度大于履带机构120的横向轴距。同时,举升机构上顶板240的长度与卧式单缸上顶架255的长度一致,卧式单缸上顶架255和举升机构上顶板240之间角度设计在安全范围内。
62.在本发明的一些实施例中,感知模块包括:回声探测仪、摄像头模块、雷达模块以及北斗定位模块。具体地,回声探测仪与车辆控制模块连接,本实施例通过回声探测仪液压检测履带式水陆两栖车所在位置的水深数据。同时,本实施例通过摄像头模块获取履带式水陆两栖车周围的路面图像,并反馈至车辆控制模块。另外,本实施例还通过雷达模块检测履带式水陆两栖车与周围障碍物的距离。进一步地,本实施例提供北斗定位模块获取履带式水陆两栖车的定位信息。其中,回声探测仪主要包括操作平台上的显示器、发射系统、发射换能器、接受系统、接受换能器和电源设备。显示器是整机的中枢,作用是控制协调整机工作并且测量声波往返时间并将其转算成水深加以显示。发射系统将显示器的发射指令变为一定脉冲宽度、频率和输出功率的电振荡脉冲去推动发射换能器工作。发射换能器将电振荡信号转变为机械振动信号,即将电能转换为声能,形成超声波信号向水底发射。接受换能器的作用与发射换能器正好相反,它将从水底反射来的声波信号转变为电振荡信号,即将声能转换为电能。接受系统的作用是将来自接受换能器的回波信号加以适当地放大、选择和处理,变换为适合显示器所需要的回波脉冲信号。电源设备即为履带式水陆两栖车上的电源供电系统。另外,本实施例通过摄像头模块获取履带式水陆两栖车辆四周地形路面障碍物的图像数据,并通过雷达模块对四周的地形路面障碍物进行测距。然后,车辆控制模块对获取的图像数据、水深数据以及测距数据进行信息甄别筛选、信息融合以及信息处理,从而形成车辆控制所需的输入信号或控制量、目标量,得到前方路面附着信息以及车速等。
63.本发明实施例提供一种履带式水陆两栖车辆控制方法,能够通过对履带的上升与下降进行较精确地控制,并对相应的环境进行自适应调节,有效地提高了履带式水陆两栖车对特殊工况的通过能力。参照图6,本发明实施例的方法包括但不限于步骤s610、步骤s620和步骤s630。
64.具体地,将本实施例的方法应用于上述履带式水陆两栖车辆控制系统的应用过程包括但不限于以下步骤:
65.s610:获取履带式水陆两栖车周围的环境数据。
66.s620:获取履带式水陆两栖车的工况信息。
67.s630:根据环境数据和工况信息控制举升机构调整履带机构的升降状态。
68.在本具体实施例中,本实施例首先获取履带式水陆两栖车周围的环境数据。然后通过操作平台获取履带式水陆两栖车的环境数据。进一步地,本实施例通过反馈的环境数据以及工况信息控制举升机构的升降,从而带动与举升机构连接的履带机构120升降。具体地,本实施例通过控制系统中的感知模块对履带式水陆两栖车周围的环境数据进行实时检测,并反馈到车辆控制模块。同时,本实施例通过操作平台获取履带式水陆两栖车辆当前的工况信息。例如,当履带式水陆两栖车从陆地过渡到水面上的工况,或者从水面登陆到陆地上的工况等。进一步地,本实施例通过获取的环境数据以及工况信息,分析得到履带机构120的期望升降状态,从而控制举升机构的升降状态,及时准确地调整履带机构120的升降状态,使得履带式水陆两栖车辆能够较好地适应当前位置的地形环境。同时,本实施例以通过环境数据和工况信息控制举升机构调整履带机构120的升降状态的方式,对履带机构120的上升与下降进行较精确地控制,并对相应的环境进行自适应调节,有效地提高了履带式水陆两栖车对特殊工况的通过能力。
69.需要说明的是,在本发明的一些实施例中,根据环境数据和工况信息控制举升机构调整履带机构的升降状态包括调整履带机构的升降距离以及升降角度。在本实施例中,通过环境数据和工况信息判断得到当前履带机构的期望升降状态后,本实施例通过控制双剪叉举升机构110工作,调整履带机构120的升降位置。同时,本实施例通过控制卧式单缸液压中顶机构140工作,调整履带机构120的升降角度。本实施例以双剪叉举升机构110和卧式单缸液压中顶机构140组合工作的方式,调整履带机构120的升降状态,使得调整后的履带机构120能够更好地接触地面,获得较好的抓地力,从而较好地适应地形较为复杂的环境。
70.在本发明的一些实施例中,获取履带式水陆两栖车周围的环境数据,包括但不限于以下步骤:
71.获取履带式水陆两栖车周围的水深数据、路面图像、障碍物距离以及定位信息。
72.在本具体实施例中,环境数据包括履带式水陆两栖车周围的水深数据、路面图像、障碍物距离以及定位信息。相应地,本实施例通过感知模块获取履带式水陆两栖车周围的水深数据、路面图像、障碍物距离以及定位信息。具体地,本实施例通过回声探测仪实时检测履带式水陆两栖车辆当前位置周围的水深数据,并反馈至车辆控制模块。同时,本实施例通过感知模块上的摄像头模块获取履带式水陆两栖车辆四周的地理环境图像,即路面图像,并通过雷达模块检测周围障碍物与履带式水陆两栖车辆的距离。本实施例还通过北斗定位模块获取履带式水陆两栖车辆当前的位置信息。通过车辆的位置信息能够计算出车辆的车速信息。相应地,本实施例将获取的水深数据、路面图像、障碍物距离以及定位信息反馈至车辆控制模块,从而完成环境数据的获取。
73.在本发明的一些实施例中,工况信息包括水上航行工况和水陆交界登陆工况。相应地,根据环境数据和工况信息控制举升机构调整履带机构的升降状态,包括但不限于以下步骤:
74.当确定工况信息为水上航行工况,根据水深数据确定履带式水陆两栖车的当前位置水深数据大于预设浮起水面高度,控制举升机构收缩。
75.或者,当确定工况信息为水陆交界登陆工况,根据水深数据确定履带式水陆两栖车的当前位置水深数据小于预设浮起水面高度,根据环境数据调整举升机构的升降距离以及升降角度。
76.在本具体实施例中,履带式水陆两栖车辆的工况信息包括水上航行工况和水陆交界登陆工况。其中,水上航行工况指履带式水陆两栖车辆从岸边进入到水中的工况,水陆交界登陆工况指履带式水陆两栖车辆从水中行驶到岸边登陆的工况。具体地,当确定当前的工况为水上航行工况,本实施例根据履带式水陆两栖车当前位置的水深数据判断当前位置的水深数据是否大于预设的浮起水面高度。当确定当前位置的水深数据大于预设浮起水面高度,则控制举升机构收缩。此时履带机构120处于收缩状态。另外,当确定履带式水陆两栖车辆当前的工况为水陆交界登陆工况,本实施例根据水深数据确定履带式水陆两栖车辆当前位置水深数据是否小于预设浮起水面高度。当确定当前位置的水深数据小于预设浮起水面高度,则本实施根据环境数据调整举升机构的升降距离和升降角度,从而较为精确地实现履带机构120的升降状态调整。示例性地,参照图5,当履带式水陆两栖车辆从岸边进入到水中时,此时双剪叉举升机构110处于伸张状态且卧式单缸上顶架255与举升机构上顶板240之间角度为0度。随着车辆的前进,履带式水陆两栖车辆的前段履带进入水中,后段履带还在与地面接触,车辆上的回声探测仪通过测量水深将数据反馈在车辆控制模块上,车辆控制模块通过将当前位置的实时水深数据与预设的浮起水面高度进行比较,当当前水深高度大于预设的浮起水面高度时,车辆控制模块通过发送信号给液压控制部件,通过液压控制部件来控制举升机构,将履带机构120收缩到履带式水陆两栖车辆底部的槽内,以最大化减小履带机构120在水中的阻力。
77.示例性地,参照图4,当履带式水陆两栖车辆从水中行驶到岸边,车辆即将到达岸边时,此时双剪叉举升机构110处于收缩状态且卧式单缸上顶架255与举升机构上顶板240之间的角度为0度,随着车辆的前进,履带式水陆两栖车辆前段履带开始与地面接触,后段履带还在水中,车辆上的回声探测仪通过测量水深将数据反馈在车辆控制模块上,车辆控制模块通过将当前位置的实时水深数据与预设的浮起水面高度进行比较,当当前水深高度小于预设的浮起水面高度时,车辆控制模块通过发送信号给液压控制部件,通过控制双剪叉举升机构110进行伸张,并且根据岸边的地形来控制卧式单缸上顶架255与举升机构上顶板240之间的角度以实现履带能够更好的附着地面从而使车辆从水中驶入岸边。
78.需要说明的是,在本发明的一些实施例中,履带式水路两栖车辆控制方法中还包括车辆安全自锁。本实施例在控制举升机构的升降调整履带机构120的升降状态以通过不同工况过程中,车辆控制模块会通过感知模块检测履带式水陆两栖车辆当前的车速数据。当确定当前履带式水陆两栖车辆的车速为零时才会执行控制履带机构120升降的控制信号。本实施例通过以当前车速是否为零判断是否执行履带机构120升降控制信号的方式,使得履带式水陆两栖车辆安全通过不同工况过程。
79.在本发明的一些实施例中,在执行根据环境数据和工况信息调整举升机构工作状态这一步骤之后,本发明提供的控制方法还包括但不限于以下步骤:
80.获取履带式水陆两栖车的工作模式。其中,工作模式包括坡道起步模式以及坡道驻车模式。
81.根据工作模式对履带式水陆两栖车进行受力分析,得到受力分析结果。
82.根据受力分析结果计算得到履带式水陆两栖车的总需求转矩。
83.根据总需求转矩调整履带式水陆两栖车的工作状态。
84.在本具体实施例中,本实施例的控制方法还包括有坡道辅助控制方法,在坡道辅
助控制过程中,车辆控制模块能够进行驱动转矩及制动转矩的计算,缓解履带式水陆两栖车辆在水陆交界处爬坡时的安全问题以及提供相应的所需转矩以缓解车辆滑坡问题。具体地,本实施例首先获取履带式水陆两栖车辆的工作模式。履带式水陆两栖车辆的工作模式包括坡道起步模式以及坡道驻车模式。另外,车辆的工作模式还包括驾驶员操控模式,在紧急情况下,驾驶员通过踩下油门压板与制动踏板对水陆两栖车辆的车速进行干预。进一步地,本实施例根据履带式水陆两栖车辆的工作模式对履带式水陆两栖车进行受力分析,得到受力分析结果。本实施例根据受力分析结果计算得到履带式水陆两栖车辆的总需求转矩,并根据总需求转矩调整履带式水陆两栖车的工作状态。示例性地,在坡道辅助控制过程中需要对履带式水陆两栖车进行受力情况分析,其中fq、fz分别为履带式水陆两栖车辆总需求驱动转矩和液压系统制动转矩,m为履带式水陆两栖车辆的质量,f为滚动阻力系数,g为重力加速度,a为坡道的角度,沿坡道向下的力为重力沿坡下力和摩擦力,根据牛顿第二定律得到下面公式(1):
[0085][0086]
根据水陆两栖车在坡道上的不同情况,可以分为以下几种:
[0087]
(1)驻坡:履带式水陆两栖车辆静止于坡道,无运动趋势,车辆重力沿坡下分力为阻力,制动力受力方向沿坡道向上,此时车辆受力平衡,运动学公式如下式(2):
[0088]fz
=mgsina
ꢀꢀꢀꢀꢀꢀꢀ
(2)
[0089]
(2)起步:沿着坡道的方向上受力平衡以及垂直坡道上的方向受力,运动学公式如下式(3)和下式(4):
[0090]fz
=mgsina+fmgcosa
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0091]fy
=mgcosa
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0092]
其中,水陆两栖车辆所受大部分力来自于重力沿坡道向下分力mgsuna,起步时,车辆有向上运动趋势,此时驱动力加大,制动力减小,运动学公式如下式(5):
[0093][0094]
(3)爬坡行驶:车辆向上运动,动力学公式如下式(6):
[0095][0096]
需要说明的是,在本发明的一些实施例中,当履带式水陆两栖车辆进入坡道辅助模式后,主要在于坡道模式间的相互转换,因此稳定的完成模式转换是维持履带式水陆两栖车辆在水陆交界处坡道上平稳行驶的先决条件。本实施例通过采用逻辑控制策略进行坡道模式间的相互转换。例如,坡道驻车模式进入坡道起步模式时,需要确定保证节气门开度大于一个阈值,且车速大于1km/h以及实际坡度大于坡度阈值时,满足上述条件,坡道驻车模式切换成坡道起步模式。同理,当节气门开度小于阈值时,直接进入坡道驻车模式。当履带式水陆两栖车辆进入坡道辅助控制后,会在人机交互界面上显示出坡道辅助模式的符号,并在此基础上细化驻车模式符号和坡道起步模式符号,方便驾驶员准确的知道此时车辆所处的系统状态。
[0097]
在本发明的一些实施例中,根据受力分析结果计算得到履带式水陆两栖车的总需求转矩,包括但不限于以下步骤:
[0098]
构建前馈补偿器。
[0099]
根据前馈补偿器通过履带式水陆两栖车的行驶阻力和液压制动转矩的差值,得到前馈补偿力矩。
[0100]
在本具体实施例中,本实施例通过构建前馈补偿器,然后根据构建的前馈补偿器结合履带式水陆两栖车的行驶阻力和液压制动转矩的差距,计算得到前馈补偿力矩,使得履带式水陆两栖车的合力为零,缓解了车辆滑坡的问题。具体地,坡道上出现变化主要以驱动力和制动力为主,要满足车辆不出现下滑现象,必须保证水陆两栖车辆合力矩向上,所以坡道辅助模式的前馈补偿公式如下式(7):
[0101][0102]
其中,ts为前馈补偿器的前馈补偿驱动转矩;tq为期望驱动转矩;tz为液压制动转矩;fg为水陆两栖车辆重力沿坡道向下分力(履带上坡行驶主要阻力)。当期望驱动转矩和液压制动转矩无法抵消行驶阻力时,正常情况下车辆会出现下滑状态,若严重则将导致安全事故,此时通过前馈补偿器利用行驶阻力和液压制动转矩的差值作为前馈补偿力矩,从而使合力为零,使得车辆安全行驶上坡。
[0103]
以上是对本发明的较佳实施进行了具体说明,但本发明并不局限于上述实施方式,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种的等同变形或替换,这些等同的变形或替换均包含在本发明权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1