车辆智能控制方法、装置、存储介质和车辆与流程
本公开涉及车辆,尤其涉及一种车辆智能控制方法、装置、存储介质和车辆。
背景技术:
1、相关技术中,通过对车内乘客的数量和位置进行统计,并根据乘客的数量和位置执行相应的操作,能够为乘客提供更好的服务。例如对乘客进行安全带提醒,当车辆启动后,确定车内乘客所在的位置,并检测对应位置的座椅是否已系安全带,并提醒未系安全带的乘客系上安全带。
2、确定车内乘客的数量和位置主要有两种方式,第一种,在每个座椅下方安置压力传感器,当检测到压力值处于设定范围时,则判断该座椅上有乘客,但是当乘客的体重未达标(如儿童)时,由于压力值未能处于设定范围,则会误判为该座椅上没有乘客,另外当座椅上放置了一个等重量的包裹时,又会误判为该座椅上有乘客,该种方式误判率高;第二种,在车内安装用于采集车内图像的摄像头,根据摄像头采集的车内图像进行人脸识别,每个人脸对应一位乘客,识别到人脸后可确定人脸所在的位置,即得到车内乘客的位置,该种方式成本较高,且具有隐私风险,另外,摄像头对光线要求高,夜晚性能大幅下降,而且由于座椅的阻挡,存在视觉盲区。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种车辆智能控制方法、装置、存储介质和车辆。
2、根据本公开实施例的第一方面,提供一种车辆智能控制方法,包括:
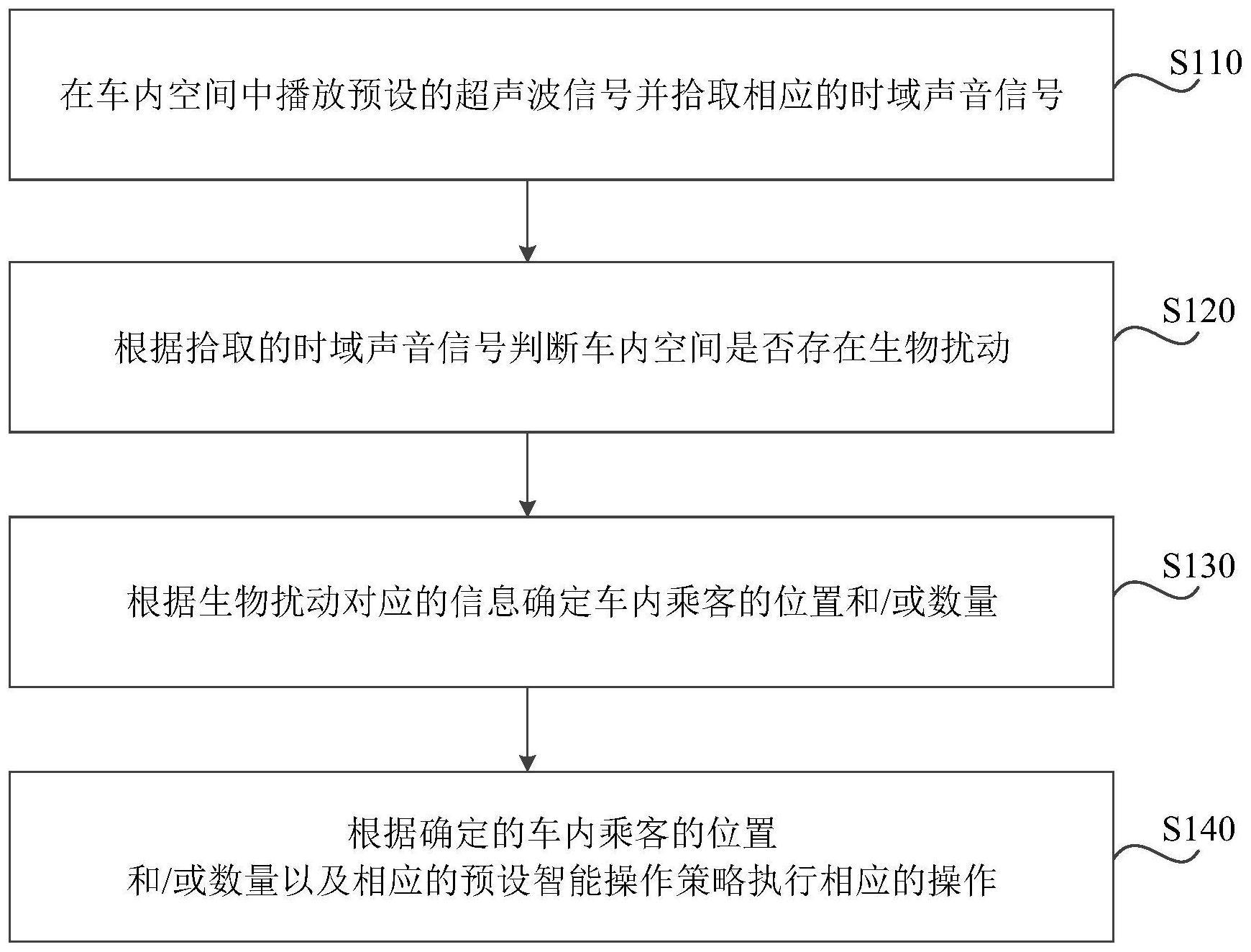
3、在车内空间中播放预设的超声波信号并拾取相应的时域声音信号;
4、根据所述时域声音信号判断所述车内空间是否存在生物扰动;
5、根据所述生物扰动对应的信息确定车内乘客的位置和/或数量;
6、根据确定的车内乘客的位置和/或数量以及相应的预设智能操作策略执行相应的操作。
7、可选的,所述根据所述时域声音信号判断所述车内空间是否存在生物扰动,包括:
8、根据拾取的所述时域声音信号,确定播放的超声波信号在车内空间的不同位置所产生的扰动幅值,得到幅值矩阵;
9、检测所述幅值矩阵上的极大值,根据检测结果确定所述车内空间是否存在生物扰动。
10、可选的,车内的每排座椅分别对应一个用于拾取时域声音信号的麦克风阵列,所述根据拾取的所述时域声音信号,确定播放的超声波信号在车内空间的不同位置所产生的扰动幅值,得到幅值矩阵,包括:
11、针对每个所述麦克风阵列,对所述麦克风阵列拾取的所述时域声音信号进行分帧,并对分帧后的一帧时域声音信号进行数字采样,获得所述麦克风阵列对应的声音信号矩阵;
12、将所述声音信号矩阵变换为一维矩阵后进行转置,得到变换矩阵;
13、计算所述变换矩阵的相关矩阵并对所述相关矩阵进行特征值分解,得到所述相关矩阵的特征向量;
14、将所述特征向量代入关于扰动幅值的计算式,得到所述麦克风阵列对应的所述幅值矩阵。
15、可选的,所述关于扰动幅值的计算式为:
16、
17、其中,d表示相对麦克风阵列的入射距离,θ表示相对麦克风阵列的入射角度,v(d)为入射距离向量,u(θ)为入射角度向量,q为特征向量,qh为特征向量q的共轭矩阵,p(θ,d)表示播放的超声波信号在车内空间的由入射距离d和入射角度θ所形成的位置所产生的扰动幅值。
18、可选的,所述入射距离向量v(d)和所述入射角度向量u(θ)分别为:
19、
20、
21、其中,j为虚数单位,λ为播放的超声波信号的波长,c为声速,t为一帧时域声音信号的时长,ts为采样间隔时间,b为播放的超声波信号的带宽,δ为麦克风阵列中麦克风的间隔距离,m为一帧时域声音信号的采样点的总数,n为麦克风阵列中的麦克风个数。
22、可选的,所述检测所述幅值矩阵上的极大值,根据检测结果确定所述车内空间是否存在生物扰动,包括:
23、确定预设大小的矩形框并使所述矩形框在所述幅值矩阵上顺序移动且每次移动后计算所述矩形框内的幅值和;
24、针对每个所述幅值和,确定该幅值和是否大于周边预设范围内的所有幅值和;
25、如果该幅值和大于周边预设范围内的所有幅值和,则确定所述幅值矩阵中该幅值和对应的位置存在一个极大值;
26、确定所述幅值矩阵中每个所述极大值所在的位置存在生物扰动。
27、可选的,所述检测所述幅值矩阵上的极大值,根据检测结果确定所述车内空间是否存在生物扰动,包括:
28、确定预设大小的矩形框,将所述矩形框移动至所述幅值矩阵上的各座椅位置,以及使所述矩形框在每个所述座椅位置的周边预设范围内移动,在每次移动后计算所述矩形框内的幅值和;
29、针对每个座椅位置的幅值和,确定该座椅位置的幅值和是否大于周边预设范围内的所有幅值和;
30、如果该座椅位置的幅值和大于周边预设范围内的所有幅值和,则确定所述幅值矩阵中该座椅位置存在一个极大值;
31、确定所述幅值矩阵中每个所述极大值所在的位置存在生物扰动。
32、可选的,车内的每排座椅分别对应一个用于拾取时域声音信号的麦克风阵列,所述在车内空间中播放预设的超声波信号并拾取相应的时域声音信号,包括:
33、控制车内的目标扬声器在车内空间中播放预设的超声波信号,并通过每排座椅对应的一个麦克风阵列拾取相应的时域声音信号。
34、可选的,车内的每排座椅分别对应一个用于播放超声波信号的扬声器和一个用于拾取时域声音信号的麦克风阵列,所述在车内空间中播放预设的超声波信号并拾取相应的时域声音信号,包括:
35、依次控制每排座椅对应的扬声器在车内空间中播放预设的超声波信号,且每控制一排座椅对应的扬声器播放预设的超声波信号后,通过该排座椅对应的一个麦克风阵列拾取相应的时域声音信号。
36、根据本公开实施例的第二方面,提供一种车辆智能控制装置,包括:
37、信号获取模块,用于在车内空间中播放预设的超声波信号并拾取相应的时域声音信号;
38、扰动判断模块,用于根据所述时域声音信号判断所述车内空间是否存在生物扰动;
39、乘客确定模块,用于根据所述生物扰动对应的信息确定车内乘客的位置和/或数量;
40、智能控制模块,用于根据确定的车内乘客的位置和/或数量以及相应的预设智能操作策略执行相应的操作。
41、根据本公开实施例的第三方面,提供一种计算机可读存储介质,其上存储有计算机程序指令,该程序指令被处理器执行时实现本公开第一方面所提供的车辆智能控制方法的步骤。
42、根据本公开实施例的第四方面,提供一种车辆,包括:
43、扬声器,用于播放预设的超声波信号;
44、麦克风阵列,用于拾取时域声音信号;
45、处理器,与所述扬声器和所述麦克风阵列连接;
46、用于存储处理器可执行指令的存储器;
47、其中,所述处理器被配置为执行所述存储器中存储的指令,以实现本公开第一方面所提供的车辆智能控制方法的步骤。
48、本公开的实施例提供的技术方案可以包括以下有益效果:
49、在上述方案中,首先在车内空间中播放预设的超声波信号并拾取相应的时域声音信号,根据拾取的时域声音信号判断车内空间中是否存在生物扰动,如果存在生物扰动,则表示对应位置有一位乘客,从而根据生物扰动情况能够获得车内乘客的位置和/或数量,进而根据乘客的位置和/或数量对车辆进行智能控制,有利于为乘客提供更好的服务,优化乘客的乘车体验。由于本方案采用超声波对车内生物体进行探测,一方面,由于座椅上的包裹不会导致超声波场扰动,故不会被判定为生物扰动,因此可以避免因放置包裹所导致的误报,另一方面,本方案关注的是车内空间中的生物扰动,而儿童和成人都会产生生物扰动,因此可以解决因儿童体重不达标所导致的误报。而且,本方案对光线无要求,能有效应对黑暗环境,夜晚也能正常工作,不存在盲区。
50、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!