一种电动汽车控制方法、装置及设备与流程
1.本发明属于电动汽车技术领域,尤其是涉及一种电动汽车控制方法、装置及设备。
背景技术:
2.电机控制器(mcu,motor control unit)是新能源汽车动力系统的“大脑”,动力电池更是新能源汽车的动力源,均对整车动力性、经济性和可靠性等有重要影响,二者均为新能源汽车中用户重点关注的两大部件。igbt(insulated gate bipolar transistor,绝缘栅双极型晶体管)功率模块是mcu的核心部件,也是mcu中成本最高的单个二级零部件,约占mcu成本的40%。因此,mcu具备的故障诊断功能,可以最大限度的保障igbt功率模块的可靠性。但是现有mcu故障保护策略中,极少与整车策略相关联,在整车故障案例中,有的案例为igbt功率模块和动力电池继电器或者动力电池保险同时发生故障。
3.这是由于在新能源汽车整车电气架构中,mcu通过动力电池继电器和动力电池保险,与动力电池连接在一起。当igbt功率模块发生过流故障,动力电池建立高压,进一步整车进入行驶状态,igbt功率模块开关管,导致mcu某一相的桥臂直通,此时动力电池将会承受一个大电流,动力电池继电器或者动力电池保险接触点可能已经开始出现轻微烧焦状,如果此时反复多次进行整车上下电,动力电池继电器会发生粘连或者动力电池保险出现熔断。而且mcu与动力电池继电器或者动力电池保险发生故障后,售后维修需更换mcu的同时,将动力电池拆除,然后再维修动力电池继电器或者动力电池保险,导致整车售后维修成本增加。
技术实现要素:
4.本发明实施例的目的在于提供一种电动汽车控制方法、装置及设备,从而解决现有技术中由于mcu的igbt功率模块发生过流故障,整车反复多次进行上下电,导致动力电池继电器发生粘连或者动力电池保险出现熔断的问题。
5.为了实现上述目的,本发明的实施例提供了一种电动汽车控制方法,包括:
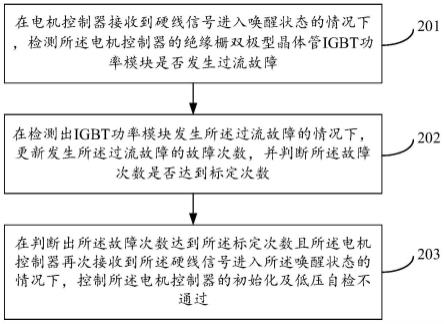
6.在电机控制器接收到硬线信号进入唤醒状态的情况下,检测所述电机控制器的绝缘栅双极型晶体管igbt功率模块是否发生过流故障;
7.在检测出igbt功率模块发生所述过流故障的情况下,更新发生所述过流故障的故障次数,并判断所述故障次数是否达到标定次数;
8.在判断出所述故障次数达到所述标定次数且所述电机控制器再次接收到所述硬线信号进入所述唤醒状态的情况下,控制所述电机控制器的初始化及低压自检不通过。
9.可选地,所述的电动汽车控制方法,所述过流故障为所述igbt功率模块的三相桥电路中的任一相桥电路的上桥臂或下桥臂中的集电极和发射极之间发生短路,且集电极和栅极之间发生开路,且栅极和发射极之间发生开路。
10.可选地,所述的电动汽车控制方法,在判断出所述故障次数达到所述标定次数的情况下,所述方法还包括:
11.所述电机控制器向整车控制器报告所述故障次数。
12.可选地,所述的电动汽车控制方法,在检测出所述igbt功率模块未发生所述过流故障的情况下,所述方法还包括:
13.所述电机控制器将所述故障次数清零。
14.可选地,所述的电动汽车控制方法,还包括:
15.在检测出所述igbt功率模块未发生所述过流故障,或者在判断出所述故障次数未达到所述标定次数的情况下,若所述电机控制器再次接收到所述硬线信号进入所述唤醒状态,控制所述电机控制器的初始化及低压自检通过;
16.所述电机控制器向整车控制器发送初始化及低压自检通过标志信息。
17.可选地,所述的电动汽车控制方法,在所述电机控制器向整车控制器发送初始化及低压自检通过标志信息之后,所述方法还包括:
18.在所述电机控制器接收所述整车控制器发送的转矩指令的情况下,所述电机控制器输出交流电,控制电机转动;
19.其中,所述转矩指令是所述整车控制器在接收到所述初始化及低压自检通过标志信息后,控制动力电池建立高压且进行高压检测后发送的。
20.为了实现上述目的,本发明的实施例提供一种电动汽车控制装置,包括:
21.检测模块,用于在电机控制器接收到硬线信号进入唤醒状态的情况下,检测所述电机控制器的绝缘栅双极型晶体管igbt功率模块是否发生过流故障;
22.判断模块,用于在检测出igbt功率模块发生所述过流故障的情况下,更新发生所述过流故障的故障次数,并判断所述故障次数是否达到标定次数;
23.第一控制模块,用于在判断出所述故障次数达到所述标定次数且所述电机控制器再次接收到所述硬线信号进入所述唤醒状态的情况下,控制所述电机控制器的初始化及低压自检不通过。
24.可选地,所述的电动汽车控制装置,所述过流故障为所述igbt功率模块的三相桥电路中的任一相桥电路的上桥臂或下桥臂中的集电极和发射极之间发生短路,且集电极和栅极之间发生开路,且栅极和发射极之间发生开路。
25.可选地,所述的电动汽车控制装置,还包括:
26.报告模块,用于所述电机控制器向整车控制器报告所述故障次数。
27.可选地,所述的电动汽车控制装置,还包括:
28.清零模块,用于所述电机控制器将所述故障次数清零。
29.可选地,所述的电动汽车控制装置,还包括:
30.第二控制模块,用于在检测出所述igbt功率模块未发生所述过流故障,或者在判断出所述故障次数未达到所述标定次数的情况下,若所述电机控制器再次接收到所述硬线信号进入所述唤醒状态,控制所述电机控制器的初始化及低压自检通过;
31.发送模块,用于所述电机控制器向整车控制器发送初始化及低压自检通过标志信息。
32.可选地,所述的电动汽车控制装置,还包括:
33.第三控制模块,用于在所述电机控制器接收所述整车控制器发送的转矩指令的情况下,所述电机控制器输出交流电,控制电机转动;
34.其中,所述转矩指令是所述整车控制器在接收到所述初始化及低压自检通过标志信息后,控制动力电池建立高压且进行高压检测后发送的。
35.为了实现上述目的,本发明的实施例提供一种电动汽车控制设备,包括收发器、处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令;所述处理器执行所述程序或指令时实现如上任一项所述的电动汽车控制方法。
36.为了实现上述目的,本发明的实施例提供一种可读存储介质,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如上任一项所述的电动汽车控制方法。
37.本发明的上述技术方案至少具有如下有益效果:
38.上述方案中,通过在电机控制器接收到硬线信号进入唤醒状态,且检测出igbt功率模块发生过流故障的情况下,更新发生所述过流故障的故障次数,并在判断出所述故障次数达到标定次数且所述电机控制器再次接收到所述硬线信号进入所述唤醒状态的情况下,控制所述电机控制器的初始化及低压自检不通过,这样不会由于igbt功率模块发生过流故障导致母线短路,避免给动力电池带来大电流冲击,从而避免动力电池继电器粘连或者动力电池保险发生熔断,有效地保护动力电池,降低售后维修成本和维修工时。
附图说明
39.图1为电动汽车的动力电池与电机控制器的连接电气架构示意图;
40.图2为本发明实施例的电动汽车控制方法的步骤示意图;
41.图3为电动汽车的igbt功率模块发生过流故障的示意图;
42.图4为本发明实施例的应用示意图;
43.图5为本发明实施例的电动汽车控制装置的结构示意图。
具体实施方式
44.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
45.本发明实施例针对现有技术中由于mcu的igbt功率模块发生过流故障,整车反复多次进行上下电,导致动力电池继电器发生粘连或者动力电池保险出现熔断的问题,提供一种电动汽车控制方法、装置及设备。
46.首先对本发明实施例相关的一些概念进行如下说明。
47.请参阅图1,图1为电动汽车的动力电池与mcu的连接电气架构示意图,其中,“k1”表示主负继电器,“k2”表示预充继电器,“k3”表示主正继电器,“f1”表示动力电池保险,“m”表示与mcu连接的永磁同步电机(permanent-magnet synchronous motor,pmsm)。mcu通过主负继电器、主正继电器和保险,与动力电池连接在一起。igbt功率模块内部包含三相桥电路,每相桥电路均包括上桥臂和下桥臂,三相桥电路共计六个桥臂,mcu通过控制六个桥臂的导通与断开,进而产生驱动电机所需要的电流。
48.如图2所示,本发明的一实施例提供了一种电动汽车控制方法,包括:
49.步骤201:在mcu接收到硬线信号进入唤醒状态的情况下,检测所述mcu的igbt功率模块是否发生过流故障;
50.其中,硬线信号即kl15,用于电动汽车点火控制。也就是说,在整车上电,整车控制器(vcu,vehicle control unit)通过硬线信号唤醒mcu,mcu进入唤醒状态的情况下,mcu对igbt功率模块是否发生过流故障进行检测。
51.步骤202:在检测出igbt功率模块发生所述过流故障的情况下,更新发生所述过流故障的故障次数,并判断所述故障次数是否达到标定次数;
52.需要说明的是,如图3所示,所述过流故障为所述igbt功率模块的三相桥电路中的任一相桥电路的上桥臂或下桥臂中的集电极(c)和发射极(e)之间发生短路,且集电极(c)和栅极(g)之间发生开路,且栅极(g)和发射极(e)之间发生开路。
53.也就是说,图3中的任一相桥电路的上桥臂或下桥臂中的ce短路,cg开路,ge开路即为过流故障。
54.还需要说明的是,当图3中的q1发生过流故障(即ce短路,cg开路,ce开路)时,若mcu的初始化及低压自检通过,则按照整车上电流程,整车可以顺利进入行驶模式,此时q1和q2均处于闭合状态,导致母线短路(即动力电池正和负短路),q2过流关断,同时在短路过程中形成短路大电流,动力电池主正继电器和主负继电器承受大电流,在动力电池继电器接触点表面可能已经开始出现轻微的烧焦现象,整车无法正常行驶,用户并不能判断故障影响等级,通常的操作为尝试整车重新上下电,如果此时用户多次反复上下电,动力电池主正继电器和主负继电器连续多次承受短路大电流,主正继电器和主负继电器发生粘连,进一步动力电池保险发生熔断,整车故障进一步发生扩大化。
55.步骤203:在判断出所述故障次数达到所述标定次数且所述mcu再次接收到所述硬线信号进入所述唤醒状态的情况下,控制所述mcu的初始化及低压自检不通过。
56.也就是说,在故障次数达到标定次数,且整车再次上电,vcu通过硬线信号再次唤醒mcu,mcu进入唤醒状态的情况下,mcu开始初始化及低压自检流程,mcu控制初始化及低压自检不通过,mcu不会向vcu发送初始化及低压自检通过标志信息,vcu接收不到该初始化及低压自检通过标志信息,vcu不会引导动力电池建立高压,进一步整车不会进入行驶模式,从而避免动力电池承受短路大电流,以及避免用户多次反复上下电导致的动力电池继电器和动力电池保险熔断,扩大整车故障。
57.需要说明的是,标定次数根据经验或者实验标定确定,在此不作限制和对比。
58.本发明实施例,通过在mcu接收到硬线信号进入唤醒状态,且检测出igbt功率模块发生过流故障的情况下,更新发生所述过流故障的故障次数,并在判断出所述故障次数达到标定次数且所述mcu再次接收到所述硬线信号进入所述唤醒状态的情况下,控制所述mcu的初始化及低压自检不通过,这样不会由于igbt功率模块发生过流故障导致母线短路,避免给动力电池带来大电流冲击,从而避免动力电池继电器粘连或者动力电池保险发生熔断,有效地保护动力电池,降低售后维修成本和维修工时。
59.可选地,所述的电动汽车控制方法,在判断出所述故障次数达到所述标定次数的情况下,所述方法还包括:
60.所述mcu向vcu报告所述故障次数。
61.需要说明的是,在vcu接收到故障次数,获知igbt功率模块发生过流故障的故障次数达到标定次数的情况下,vcu不会引导动力电池建立高压。
62.可选地,所述的电动汽车控制方法,在检测出所述igbt功率模块未发生所述过流
故障的情况下,所述方法还包括:
63.所述mcu将所述故障次数清零。
64.需要说明的是,故障次数清零,mcu开始初始化及低压自检流程,mcu控制初始化及低压自检通过。
65.可选地,所述的电动汽车控制方法,还包括:
66.在检测出所述igbt功率模块未发生所述过流故障,或者在判断出所述故障次数未达到所述标定次数的情况下,若所述mcu再次接收到所述硬线信号进入所述唤醒状态,控制所述mcu的初始化及低压自检通过;
67.所述mcu向vcu发送初始化及低压自检通过标志信息。
68.也就是说,在mcu检测出igbt功率模块未发生过流故障,或者在mcu判断出故障次数未达到标定次数的情况下,若整车再次上电,vcu通过硬线信号唤醒mcu,mcu进入唤醒状态,mcu开始初始化及低压自检流程,控制mcu的初始化及低压自检通过,mcu向vcu发送初始化及低压自检通过标志信息。
69.可选地,所述的电动汽车控制方法,在所述mcu向vcu发送初始化及低压自检通过标志信息之后,所述方法还包括:
70.在所述mcu接收所述vcu发送的转矩指令的情况下,所述mcu输出交流电,控制电机转动;
71.其中,所述转矩指令是所述vcu在接收到所述初始化及低压自检通过标志信息后,控制动力电池建立高压且进行高压检测后发送的。
72.也就是说,在mcu检测出igbt功率模块未发生过流故障,或者mcu判断出发生过流故障的故障次数未达到标定次数的情况下,若整车上电,vcu通过硬线信号(kl15)唤醒mcu,mcu进入唤醒状态,则控制mcu的初始化及低压自检通过,mcu向vcu发送初始化及自检通过标志信息。
73.进一步,在vcu接收到初始化及自检通过标志信息后,vcu在确保主正继电器和预充继电器处于断开状态后,vcu引导电池管理系统(bms,battery management system)闭合主负继电器,然后vcu引导bms闭合预充继电器进行预充电,再闭合主正继电器,断开预充继电器,即预充完成,动力电池建立高压完成。
74.然后,vcu控制bms和mcu等高压用电器进行高压检测,在高压检测通过后,整车进入行驶模式,mcu开管,mcu接收vcu的转矩指令,输出交流电,控制电机转动。
75.下面,结合图4说明本发明实施例方法的应用。
76.步骤401:整车上电,vcu通过唤醒信号唤醒mcu,mcu检测igbt功率模块是否发生过流故障。
77.若mcu检测出igbt功率模块未发生过流故障,则进入步骤402:mcu将发生过流故障的故障次数清零。
78.若mcu检测出igbt功率模块发生过流故障,则进入步骤403:mcu更新发生过流故障的故障次数。
79.步骤403之后,进入步骤404:mcu判断故障次数是否达到标定次数。
80.若mcu判断故障次数达到标定次数,则进入步骤405:确定igbt功率模块中当前发生过流故障的目标相桥电路上的目标桥臂,向vcu上报故障次数和当前发生过流故障的目
标相桥电路和目标桥臂。
81.步骤406:整车再上电,vcu通过唤醒信号再次唤醒mcu,mcu控制初始化及低压自检不通过。
82.若mcu判断故障次数未达到标定次数,或者步骤402之后,则进入步骤407:整车再上电,vcu通过唤醒信号再次唤醒mcu,mcu控制初始化及低压自检通过,mcu向vcu发送初始化及低压自检通过标志信息。
83.步骤408:vcu接收初始化及低压自检通过标志信息,控制动力电池建立高压。
84.步骤409:vcu控制bms和mcu等高压用电器进行高压检测,在高压检测通过后,整车进入行驶模式。
85.如图5所示,本发明的实施例提供一种电动汽车控制装置,包括:
86.检测模块501,用于在mcu接收到硬线信号进入唤醒状态的情况下,检测所述mcu的igbt功率模块是否发生过流故障;
87.判断模块502,用于在检测出igbt功率模块发生所述过流故障的情况下,更新发生所述过流故障的故障次数,并判断所述故障次数是否达到标定次数;
88.第一控制模块503,用于在判断出所述故障次数达到所述标定次数且所述mcu再次接收到所述硬线信号进入所述唤醒状态的情况下,控制所述mcu的初始化及低压自检不通过。
89.本发明实施例,通过在mcu接收到硬线信号进入唤醒状态,且检测出igbt功率模块发生过流故障的情况下,更新发生所述过流故障的故障次数,并在判断出所述故障次数达到标定次数且所述mcu再次接收到所述硬线信号进入所述唤醒状态的情况下,控制所述mcu的初始化及低压自检不通过,这样不会由于igbt功率模块发生过流故障导致母线路,避免给动力电池带来大电流冲击,从而避免动力电池继电器粘连或者动力电池保险发生熔断,有效地保护动力电池,降低售后维修成本和维修工时。
90.可选地,所述的电动汽车控制装置,所述过流故障为所述igbt功率模块的三相桥电路中的任一相桥电路的上桥臂或下桥臂中的集电极和发射极之间发生短路,且集电极和栅极之间发生开路,且栅极和发射极之间发生开路。
91.可选地,所述的电动汽车控制装置,还包括:
92.报告模块,用于所述mcu向vcu报告所述故障次数。
93.可选地,所述的电动汽车控制装置,还包括:
94.清零模块,用于所述mcu将所述故障次数清零。
95.可选地,所述的电动汽车控制装置,还包括:
96.第二控制模块,用于在检测出所述igbt功率模块未发生所述过流故障,或者在判断出所述故障次数未达到所述标定次数的情况下,若所述mcu再次接收到所述硬线信号进入所述唤醒状态,控制所述mcu的初始化及低压自检通过;
97.发送模块,用于所述mcu向vcu发送初始化及低压自检通过标志信息。
98.可选地,所述的电动汽车控制装置,还包括:
99.第三控制模块,用于在所述mcu接收所述vcu发送的转矩指令的情况下,所述mcu输出交流电,控制电机转动;
100.其中,所述转矩指令是所述vcu在接收到所述初始化及低压自检通过标志信息后,
控制动力电池建立高压且进行高压检测后发送的。
101.需要说明的是,本发明实施例提供的电动汽车控制装置是能够执行电动汽车控制方法的装置,则上述的电动汽车控制方法的所有实施例均适用于该装置,且能够达到相同或者相似的技术效果。
102.本发明的实施例还提供一种电动汽车控制设备,包括收发器、处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令;所述处理器执行所述程序或指令时实现如上任一项所述的电动汽车控制方法。
103.其中,所述控制设备还包括收发机,所述收发机用于在所述处理器的控制下接收和发送数据。
104.具体地,所述处理器用于:
105.在mcu接收到硬线信号进入唤醒状态的情况下,检测所述mcu的igbt功率模块是否发生过流故障;
106.在检测出igbt功率模块发生所述过流故障的情况下,更新发生所述过流故障的故障次数,并判断所述故障次数是否达到标定次数;
107.在判断出所述故障次数达到所述标定次数且所述mcu再次接收到所述硬线信号进入所述唤醒状态的情况下,控制所述mcu的初始化及低压自检不通过。
108.可选地,所述过流故障为所述igbt功率模块的三相桥电路中的任一相桥电路的上桥臂或下桥臂中的集电极和发射极之间发生短路,且集电极和栅极之间发生开路,且栅极和发射极之间发生开路。
109.可选地,所述收发机用于:
110.所述mcu向vcu报告所述故障次数。
111.可选地,所述处理器具体用于:
112.所述mcu将所述故障次数清零。
113.可选地,所述处理器用于:
114.在检测出所述igbt功率模块未发生所述过流故障,或者在判断出所述故障次数未达到所述标定次数的情况下,若所述mcu再次接收到所述硬线信号进入所述唤醒状态,控制所述mcu的初始化及低压自检通过;
115.所述收发机还用于:
116.所述mcu向vcu发送初始化及低压自检通过标志信息。
117.可选地,所述处理器具体用于:
118.在所述mcu接收所述vcu发送的转矩指令的情况下,所述mcu输出交流电,控制电机转动;
119.其中,所述转矩指令是所述mcu在接收到所述初始化及低压自检通过标志信息后,控制动力电池建立高压且进行高压检测后发送的。
120.本发明的实施例还提供一种可读存储介质,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如上任一项所述的电动汽车控制方法。
121.此外,需要指出的是,在本发明的装置和方法中,显然,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本发明的等效方案。并且,执行上述系
列处理的步骤可以自然地按照说明的顺序按时间顺序执行,但是并不需要一定按照时间顺序执行,某些步骤可以并行或彼此独立地执行。对本领域的普通技术人员而言,能够理解本发明的方法和装置的全部或者任何步骤或者部件,可以在任何计算装置(包括处理器、存储介质等)或者计算装置的网络中,以硬件、固件、软件或者它们的组合加以实现,这是本领域普通技术人员在阅读了本发明的说明的情况下运用他们的基本编程技能就能实现的。
122.因此,本发明的目的还可以通过在任何计算装置上运行一个程序或者一组程序来实现。所述计算装置可以是公知的通用装置。因此,本发明的目的也可以仅仅通过提供包含实现所述方法或者装置的程序代码的程序产品来实现。也就是说,这样的程序产品也构成本发明,并且存储有这样的程序产品的存储介质也构成本发明。显然,所述存储介质可以是任何公知的存储介质或者将来所开发出来的任何存储介质。还需要指出的是,在本发明的装置和方法中,显然,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本发明的等效方案。并且,执行上述系列处理的步骤可以自然地按照说明的顺序按时间顺序执行,但是并不需要一定按照时间顺序执行。某些步骤可以并行或彼此独立地执行。
123.以上所述的是本发明的优选实施方式,应当指出对于本技术领域的普通人员来说,在不脱离本发明所述的原理前提下还可以作出若干改进和润饰,这些改进和润饰也在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1