一种导轨式移动共享充电机器人及其控制方法与流程
1.本发明涉及一种导轨式移动共享充电机器人及其控制方法,属于电动汽车充电技术领域。
背景技术:
2.随着新能源汽车产业的发展,充电桩的数量逐年增加,然而现有的充电模式大多是一个车位固定安装一个充电桩,导致充电桩的使用效率低下,建设成本高昂。为了降低建设成本和电网压力,移动式汽车充电装置得到了越来越多的发展和普及。
3.公开日期为2021年5月11日的中国专利cn112776623a提出了一种移动充电桩充电系统及移动充电桩充电、管理方法,该充电系统包括ai视觉机构、移动机构及包含蓄电池、功率变换器等充电机构,能够实现移动充电桩的完全智能化,不需要人为进行干预,24小时为新能源电动汽车充电,但是该移动充电桩仍然存在以下缺点:1)由于该移动充电桩采用蓄电池存储电能,再加上内部的功率变换器,导致该移动充电桩体积大,质量大,同时在蓄电池充、放电的过程中存在一定的损耗,导致电能利用率降低;2)由于该移动充电桩在地面上行驶,对于进出停车场的车辆来说,具有一定的交通安全隐患。
技术实现要素:
4.发明目的:针对现有技术所存在的技术问题,本发明提供一种导轨式移动共享充电机器人及其控制方法,一方面通过布置于停车位上方的导轨为充电机器人提供安全的移动路线,另一方面通过与各停车位对应的配电箱为充电机器人提供可靠的充电电源,由此实现各个停车位的灵活灵活稳定供电,充电过程无需进行蓄放电转换,有效提高充电效率和设备利用率,大大降低建设成本和电网压力。
5.技术方案:为实现上述目的,本发明提供一种导轨式移动共享充电机器人,包括通过行走轮沿导轨行走的机器人本体及搭载于机器人本体上的充电接头、机械臂,所述机械臂末端插接有充电枪,且充电枪通过充电电路与充电接头连接,所述导轨架设于若干停车位的上方,且导轨上方设置有与各个停车位对应的配电箱;所述机器人本体上设置有控制模块以及与控制模块信号连接的各功能模块,且功能模块包括通信模块、行走模块、升降模块、旋转模块、充电模块及定位模块,其中通信模块用于实现控制模块与远程控制端之间的信号传输,行走模块和定位模块分别用于实现机器人本体的行走驱动和行走定位,升降模块用于实现充电接头的升降驱动,进而实现充电接头与配电箱的充电对接,旋转模块用于实现机械臂的旋转驱动,充电模块用于实现充电电路的充电控制。
6.进一步的,所述行走模块包括行走电机、第一电机驱动电路及第一电机反馈电路,且行走电机与行走轮驱动连接,所述控制模块通过第一电机驱动电路实现行走电机的驱动控制,并通过第一电机反馈电路获取行走电机的状态信号;所述升降模块包括升降电机、第二电机驱动电路及第二电机反馈电路,且升降电
机与充电接头驱动连接,所述控制模块通过第二电机驱动电路实现升降电机的驱动控制,并通过第二电机反馈电路获取升降电机的状态信号;所述旋转模块包括旋转电机、第三电机驱动电路及第三电机反馈电路,且旋转电机与机械臂驱动连接,所述控制模块通过第三电机驱动电路实现旋转电机的驱动控制,并通过第三电机反馈电路获取旋转电机的状态信号。
7.进一步的,所述导轨上布置有与各个停车位对应的定位组件,且定位组件包括定位挡片及定位孔,所述定位模块包括定位传感器及电磁锁,且控制模块通过定位传感器对定位挡片的感应识别实现机器人本体的行走定位,并通过电磁锁与定位孔的配合实现机器人本体的行走锁定,以确保充电接头与配电箱的准确对接。
8.进一步的,所述功能模块包括位置检测模块,且导轨上布置有与各个停车位对应的车位标签,所述控制模块通过位置检测模块对车位标签的感应识别实现车位编号的实时检测,进一步提高了移动定位的准确性,避免了充电机器人定位出错影响充电进程。
9.进一步的,所述充电模块包括继电器电路和cp信号处理电路,所述控制模块通过cp信号处理电路实时获取充电枪的cp信号状态,并通过继电器电路实现充电电路的充电控制,以实现充电进程的实时控制。
10.进一步的,所述功能模块包括电能计量模块,且电能计量模块包括充电检测电路及电能计量电路,所述控制模块通过充电检测电路获取充电电路的状态参数,并通过电能计量电路获取充电枪的输出参数,以实现充电进程的精准监控。
11.此外,本发明还提供了一种基于上述导轨式移动共享充电机器人的控制方法,包括以下步骤:s1、控制模块通过通信模块接收远程控制端的驱动命令,并根据命令中的目标车位与机器人本体当前所在的位置判断行走方向和距离;s2、控制模块通过行走模块实现机器人本体的行走驱动,进而通过定位模块实现机器人本体在目标车位处的行走定位;s3、控制模块通过升降模块驱动充电接头与对应的配电箱完成充电对接;s4、控制模块通过旋转模块驱动机械臂向下旋转至设定角度,释放充电枪,并根据充电模块的反馈信号判断充电枪是否插入到目标车辆的充电口中,如果已插入则通过通信模块向远程控制端发送充电枪对接完成信号;s5、当控制模块接收到远程控制端的开始充电命令时,控制充电模块开始充电;s6、充电过程中,控制模块周期性获取充电电路的状态参数以及充电枪的输出参数,并通过通信模块发送给远程控制端;s7、当控制模块接收到远程控制端的结束充电命令时,控制充电模块结束充电;s8、当控制模块检测到充电枪已归位时,通过旋转模块驱动机械臂向上旋转归位,收回充电枪。
12.进一步的,所述步骤s2中控制模块根据行走模块的反馈信号以及目标车位与当前位置之间的距离,通过模糊pid控制对行走速度进行实时调节,使得机器人本体能够在最短时间内到达目标车位。
13.进一步的,所述步骤s2中控制模块根据目标车位与初始位置之间的距离,计算出最长行走时间并开启定时功能,如果达到定时时间,仍未到达目标车位处,则立即停止行
走,并发出超时报警,以保护行走机构。
14.进一步的,所述步骤s6中控制模块根据远程控制端发送的用电容量数据,通过充电模块实时调节充电枪的输出功率大小,从而达到有序充电、柔性充电的目的。
15.进一步的,所述步骤s4释放充电枪后,开启定时功能,如果在设定时间内,充电枪从机械臂上拔出,则停止计时,进而判断充电枪是否插入到目标车辆的充电口中;如果达到定时时间,充电枪仍在机械臂上,则控制模块控制旋转模块收回充电枪。
16.有益效果:本发明提供的一种导轨式移动共享充电机器人及其控制方法,相对于现有技术,具有以下优点:1、将导轨式移动充电机器人与多点分布式配电箱相结合,创新性地实现了灵活高效、稳定可靠的移动共享充电功能,满足“临近车位共享”、“一桩多车”、“充电车位分时共享”等需求,有效解决了老旧小区电动汽车充电难题;2、在机器人运动控制中,根据充电机器人当前位置与目标车位之间的距离,采用模糊pid控制调节充电机器人的行走速度,达到时间最优控制的目的,从而提高充电机器人的工作效率。
附图说明
17.图1为本发明实施例中充电机器人的行走状态示意图;图2为本发明实施例中充电机器人的整体结构示意图;图3为本发明实施例中充电机器人的内部结构示意图;图4为本发明实施例中配电箱的结构示意图;图5为本发明实施例中充电机器人的控制系统结构图;图6为本发明实施例中充电机器人的控制方法流程图;图7为本发明实施例中充电机器人的应用场景图;图中包括:101、行走模块,102、旋转模块,103、升降模块,104、充电模块,105、cpu模块,106、电能计量模块,107、位置检测模块,108、定位模块,109、通信模块,201、机器人本体,202、行走轮,203、充电接头,204、机械臂,205、充电枪,206、行走电机,207、升降电机,208、旋转电机,209、转动轴,210、定位传感器,211、电磁锁,212、位置传感器,213、支架,214、弹性对接头,215、弹性顶针。
具体实施方式
18.下面将结合附图对本发明的优选实施方式进行描述,更加清楚、完整地阐述本发明的技术方案。
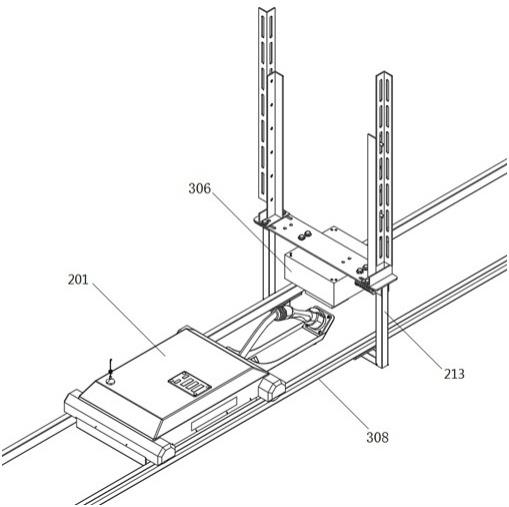
19.如图1所示为一种导轨式移动共享充电机器人,包括沿导轨308行走的机器人本体201,其中导轨308通过支架213架设于停车位的上方,且导轨308上方布置有分别与1-6号停车位309—314对应的1-6号配电箱301—306。
20.如图2、图3所示,机器人本体201的两侧一共有四个行走轮202,机器人本体201的顶部设有充电接头203,机器人本体201的底部设有容纳机械臂204的凹槽,机械臂204的末端插接有充电枪205,充电枪205通过充电电路与充电接头203连接。
21.收到充电指令后,充电机器人将沿导轨行走至指定的停车位,并通过充电接头与
对应的配电箱实现充电对接,然后释放机械臂和充电枪,供用户进行充电操作。本发明将导轨式移动充电机器人与多点分布式配电箱相结合,实现了灵活高效、稳定可靠的移动共享充电功能,充电过程无需进行蓄放电转换,有效提高了充电效率和设备利用率,大大降低了建设成本和电网压力。
22.如图5所示,机器人本体201上设置有cpu模块105以及与cpu模块信号连接的各功能模块,其中各功能模块包括行走模块101、旋转模块102、升降模块103、充电模块104、电能计量模块106、位置检测模块107、定位模块108、通信模块109,通信模块109用于实现cpu模块与云平台之间的信息交互,行走模块101和定位模块108分别用于实现行走驱动和行走定位,升降模块103用于实现充电接头203的升降驱动,旋转模块102用于实现机械臂204的旋转驱动,充电模块104用于实现充电控制,电能计量模块106用于实现充电检测,位置检测模块107用于实现车位编号识别。以上电路经过相应的信号变换电路连接到cpu模块的输入输出引脚。
23.具体的,行走模块101包括行走电机206、第一电机驱动电路及第一电机反馈电路,行走电机206通过减速箱与行走轮202驱动连接,cpu模块通过第一电机驱动电路实现行走电机206的驱动控制,并通过第一电机反馈电路获取行走电机206的状态信号(包括转速、电流等)。
24.升降模块103包括升降电机207、第二电机驱动电路及第二电机反馈电路,升降电机207与充电接头203驱动连接,cpu模块通过第二电机驱动电路实现升降电机207的驱动控制,并通过第二电机反馈电路获取升降电机207的状态信号(包括转速、电流等)。
25.旋转模块102包括旋转电机208、第三电机驱动电路及第三电机反馈电路,旋转电机208通过转动轴209与机械臂204驱动连接,cpu模块通过第三电机驱动电路实现旋转电机208的驱动控制,并通过第三电机反馈电路获取旋转电机208的状态信号(包括转速、电流等)。
26.进一步的,导轨308一侧布置有与各个停车位对应的定位组件,定位组件包括定位挡片及定位孔,定位模块108包括定位传感器210及电磁锁211,通过定位传感器210对定位挡片的感应识别实现机器人本体201的行走定位,并通过电磁锁211与定位孔的配合实现机器人本体201的行走锁定,以确保充电接头与配电箱的准确对接。
27.本实施例中,定位挡片以组为单位进行布置,每组定位挡片对应一个停车位,每组定位挡片包括两侧的宽挡片和中间的窄挡片,宽挡片用于实现粗定位(产生减速信号),窄挡片用于实现精定位(产生停止信号),由此保证定位精度。
28.进一步的,导轨308的相同一侧还布置有与各个停车位对应的车位标签,位置检测模块107采用位置传感器212,通过位置传感器212对车位标签的感应识别实现车位编号的实时检测。
29.具体的,充电模块104包括继电器电路和cp信号处理电路,其中cp信号处理电路用于实时获取充电枪的cp信号状态,继电器电路用于实现充电开关控制。电能计量模块106包括充电检测电路及电能计量电路,其中充电检测电路用于获取充电状态参数(包括电流、电压等),电能计量电路用于获取充电输出参数(包括功率、电能等)。
30.如图4所示,1-6号配电箱301—306上均设有弹性对接头214,刚性的充电接头203在升降电机207的驱动下与弹性对接头214实现压紧对接,从而实现充电对接。此外,1-6号
配电箱301—306上还设有弹性顶针215,且充电接头203上设有检测电路,通过检测电路与弹性顶针215的接通实现充电接头203与弹性对接头214的对接检测,以确保接头对接的准确性。
31.如图6所示为上述导轨式移动共享充电机器人的控制方法,包括以下步骤:s1、cpu模块通过通信模块109接收云平台的呼叫命令,根据命令中的车位编号与机器人当前所在的车位编号判断行走方向(前进、后退或不行走)和距离;s2、cpu模块根据读到的位置传感器数据和定位传感器数据,通过行走模块101实现行走驱动控制;s3、cpu模块通过升降模块103控制充电接头203连接220v交流电源;s4、cpu模块通过旋转模块102控制机械臂204释放充电枪;s5、cpu模块接收云平台转发的开始充电命令,控制充电模块104开始充电;s6、cpu模块周期性计算交流电压、交流电流数值,周期性读取电能计量电路的功率及电能数值,并通过通信模块109发送到云平台;s7、cpu模块接收云平台发送的结束充电命令,控制充电模块104结束充电;s8、cpu模块通过机械臂204上的归位传感器检测充电枪是否归位,并决定是否控制旋转模块收回充电枪。
32.步骤s2中,cpu模块根据目标车位与初始车位之间的距离,计算出最长时间并开启定时功能,一旦达到定时时间,仍未到达目标车位处,则立即停止行走,并发出超时报警,以保护行走机构。
33.步骤s6中,cpu模块还可以接收到变压器台区发来的用电容量数据,通过调节充电模块的cp信号控制充电功率的大小,从而达到有序充电、柔性充电的目的。
34.图7为导轨式移动共享充电机器人的应用场景图。其中,301—306是1—6号配电箱,分别与六个停车位对应,向每个停车位提供交流220v电源,307是充电机器人,308是导轨,为机器人提供运行轨迹,309—314是相邻的六个汽车停车位,分别对应编号1—6。1—6号配电箱固定在导轨308上方,导轨的长度能够覆盖六个汽车停车位。
35.在初始时刻,充电机器人307停在3号停车位311上方的轨道上,充电接头203连接着3号配电箱303的交流电源,充电机器人307通过通信模块109与云平台进行数据交互并解析通信模块109接收到的数据。
36.当充电机器人307接收到“前往6号停车位”的命令时,cpu模块发出信号给升降模块103控制充电接头与3号配电箱303断开连接,由于机器人当前所在的停车位编号是3,收到的目标停车位编号是6,所以cpu模块发出信号给行走模块101控制机器人307向6号车位前进,同时启动定时器开始定时,cpu模块综合行走模块101反馈的转速、电流信号、运行时间以及位置检测模块107反馈的数据,经过模糊推理对行走机构的速度进行实时控制。行走过程中,cpu模块周期性读取位置检测模块107反馈的数据,当到达目标停车位区域时,使能定位模块108工作,当cpu模块读到定位模块108输出的减速信号时,cpu模块输出信号到行走模块101以降低行走速度;当cpu模块读到定位模块108输出的停止信号时,cpu模块输出信号到行走模块101停止行走驱动。
37.接着,cpu模块发出信号给升降模块103控制充电接头连接到6号配电箱306的交流220v电源,同时cpu模块读取电能计量模块106中充电检测电路输出的数据,判断交流220v
电源是否正常,如果异常则发出报警信号,如果正常则读取电能计量模块106输出的电压、电流、功率和电能参数,并通过通信模块109发送给云平台。在判断交流220v电源正常后,cpu模块发出信号给旋转模块102控制机械臂释放充电枪,释放充电枪后开启定时器计时,在计时过程中,如果充电枪从机械臂上拔出,则停止计时;如果计时结束时,充电枪仍在机械臂上,cpu模块则发出信号给旋转模块102控制机械臂收回充电枪。
38.当充电枪拔出后,cpu模块读取充电模块104中的cp信号状态,判断充电枪是否插入到新能源汽车的充电口,如果已插入则把该状态通过通信模块109发送给云平台。cpu模块解析收到的数据中有开始充电的命令时,通过充电模块104控制继电器闭合,开始向新能源汽车充电,并将命令执行结果通过通信模块109发送到云平台。在充电过程中,cpu模块周期性读取电能计量模块106输出的电压、电流、功率及电能,并通过通信模块109发送给云平台,同时解析收到的数据,在解析的数据中有结束充电命令时,cpu模块即向充电模块104发出控制命令断开继电器,停止向新能源汽车充电。
39.当cpu模块检测到充电枪已插入到机械臂中时,cpu模块发出信号给旋转模块102控制机械臂收回充电枪,当机械臂旋转复位后,充电过程结束,充电机器人进入待机状态,等待执行下一次充电命令。
40.上述具体实施方式仅仅对本发明的优选实施方式进行描述,而并非对本发明的保护范围进行限定。在不脱离本发明设计构思和精神范畴的前提下,本领域的普通技术人员根据本发明所提供的文字描述、附图对本发明的技术方案所作出的各种变形、替代和改进,均应属于本发明的保护范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1