一种自动驾驶安全通过汇流道的纵向决策规划方法与流程
1.本发明属于汽车电器领域,具体涉及一种特定场景自动驾驶纵向决策规划方法,目的主要适用于自动驾驶功能在通过高速公路汇流道的危险场景应用。
背景技术:
2.近年来,自动驾驶功能吸引了外界不少关注,尤其是各大主机厂。自动驾驶加速度规划的基本原理主要是基于道路实时信息、车辆周围目标信息进行实时目标加速度规划,保证车辆能够在实际道路上完成跟车行驶、巡航行驶等等自动驾驶功能。
3.在通过高速公路汇流口时,现有技术有用于车辆汇流的自动驾驶控制方法,将部分道路地图信号引入道决策规划过程,采用判断本车在处于汇流区域并且即将通过道路的出口或者入口的情况下,计算本车与其他车辆的相对位置、车速等参数,并计算本车保持当前车速的情况下是否会与其他车辆相撞,并基于计算结果来采取相应的措施,使车辆能够安全地通过该汇流区域。
4.但是,现有的方法具有的局限性在于没有充分考虑道路汇流道与本车运动关系信息,进行提前加速度规划,提升通过汇流道的安全性和驾驶信心。
技术实现要素:
5.本发明提供一种自动驾驶安全通过汇流道的纵向决策规划方法,主要解决传统仅考虑汇流路口车辆与本车之间的相对关系问题进行目标加速度规划的问题,而是在通过汇流道时提前进行合理目标速度和加速决策规划。
6.本发明的技术方案如下:一种自动驾驶安全通过汇流道的纵向决策规划方法,其包括:s1,在当前自动驾驶模式是否满足开启汇流道决策规划功能,若满足,则打开汇流道决策规划功能,进入待机条件判定状态。
7.s2,基于视觉定位、导航定位和地图信息,接收必要条件信号,包括是否有汇流道、汇流道类型、本车所处车道类型、本车距离前方汇流道距离以及本车车速等信息,判定功能激活是否成立,若是,则开启安全通过的速度加速度规划计算状态。
8.s3,计算不同的距离区间对应的不同的减速度,并以计算得到的目标加速度的最小值输出到控制模块,完成车辆加速度控制。
9.这里的距离是指本车到汇流道的实际距离。
10.最小值是指汇流道距离对应的减速度,与当前运行状态下,其他场景计算出来的减速度值相比较,谁最小就输出谁。比如: 汇流道减速度根据计算得到是-0.5m/s
²
,此时有其他车在本车前方切入,该工况计算的减速度是-0.2m/s
²
,而道路限速给出减速度0 m/s
²
,那么最终输出就是最小值-0.5 m/s
²
进一步,所述s2中判定功能激活是否成立的条件和逻辑是:条件一:同时满足:
①
前方左汇流道,
②
本车处于主干道最左侧车道,
③
本车距离
汇流道距离≤设定距离,
④
本车车速≥设定速度。
11.条件二:同时满足:
⑥
前方右汇流道,
⑦
本车处于主干道最右侧车道,
③
本车距离汇流道距离≤设定距离,
④
本车车速≥设定速度。
12.当条件一、二均不成立时,功能激活不成立,继续保持输入信号周期判定。
13.当条件一、二均成立时,判定为外部信号错误,输出风险告警信息,提示自动驾驶系统做出整体决策。
14.当条件一、二中之一成立时,判定功能激活条件成立,则开启安全通过的速度加速度规划计算状态。
15.进一步,所述s3计算不同的距离对应不同的减速度分为:
①
当距离处于b到a之间时,本车采取降速到x的降速策略;
②
当距离处于c到b之间时,本车采取降速到y的降速策略;
③
当距离处于d到c之间时,本车采取降速到z的降速策略;其中,a》b》c》d,且a、b、c、d之间的距离差值在80m以上,x》y》z,且x、y、z之间的车速差在10 km/h以上。
16.由以上技术方案可见,本方法针对现有汇流道路口通行加速度规划算法中的不足和缺陷,在自动驾驶正常行驶的工况下,引入本车所处车道位置信息(超车道、中间道、右边道等)、前方道路信息(如汇流道距离、左汇流/右汇流)等,综合根据道路实际情况(坡道、限速等)以及本车实际行驶车速,进行综合规划计算,得出一个最优加速度规划值,用作自动驾驶控制目标。本发明根据自动驾驶实际需求,进行了规划方法的改进,使得加速度规划算法更能适应自动驾驶功能的升级迭代,提升功能的平台适应性和安全性能。
附图说明
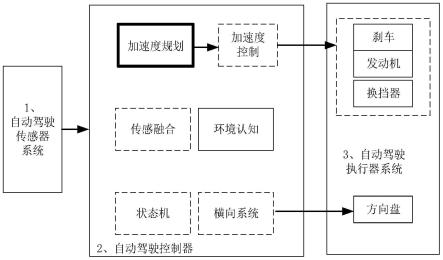
17.图1. 自动驾驶控制架构示意图;图2. 本方法提出的自动驾驶加速度规划示意图;图3. 实际汇流道场景示意图。
具体实施方式
18.以下结合附图进一步详细说明本发明的技术:如图1所示,为本发明中提及的自动驾驶功能架构示意图。图中加速度规划作为自动驾驶控制器中重要模块,负责完成车辆运行过程中全程目标加速度计算。
19.如图2所示,为本发明中体积的汇流道纵向决策规划方法具体实施方法step1, 判定当前自动驾驶模式是否满足开启本功能,若功能仅有acc功能,则不开启汇流道决策规划功能,若iacc/hwa开启,则打开汇流道决策规划功能,进入待机条件判定状态。
20.step2,基于视觉定位、导航定位和地图信息,系统开始随时接收必要条件信号,包括是否有汇流道、汇流道类型(左右方向)、本车所处车道类型(最右、居中、最左)、本车距离前方汇流道距离以及本车车速等信息,进行逻辑判定。
21.条件一:同时满足:
①
前方左汇流道,
②
本车处于主干道最左侧车道,
③
本车距离汇流道距离≤300m,
④
本车车速≥75km/h。
22.条件二:同时满足:
⑥
前方右汇流道,
⑦
本车处于主干道最右侧车道,
③
本车距离汇流道距离≤300m,
④
本车车速≥75km/h。
23.当条件一、二均不成立时,功能激活不成立,系统继续保持输入信号周期判定。
24.当条件一、二均成立时,判定为外部信号错误,输出风险告警信息,提示自动驾驶系统做出整体决策。
25.当条件一、二成立其一时,判定功能激活条件成立,则开启安全通过的速度加速度规划计算状态。
26.step3, 依据整体决策思路,不同的距离区间对应不同的减速度规划策略,进入汇流道安全通过区间距离后,进入以下条件判定:
①
当距离处于200m到300m之间时,本车采取降速到105km/h的降速策略,减速度计算策略依据绝对坐标系下车辆运动学关系计算得出,为保证舒适性输出减速度范围约束在-0.5m/s
²ꢀ‑ꢀ
0 m/s
²
之间;若车速≤105km/h,则保持当前车速策略,输出加速度为0m/s
²
。
27.②
当距离处于100m到200m之间时,本车采取降速到90km/h的降速策略,减速度计算策略依据绝对坐标系下车辆运动学关系计算得出,为保证舒适性输出减速度范围约束在-0.8m/s
²ꢀ‑ꢀ
0 m/s
²
之间;若车速≤90km/h,则保持当前车速策略,输出加速度为0m/s
²
。
28.③
当距离处于-10m到100m之间时,本车采取降速到75km/h的降速策略,减速度计算策略依据绝对坐标系下车辆运动学关系计算得出,为保证舒适性输出减速度范围约束在-1m/s
²ꢀ‑ꢀ
0 m/s
²
之间;若车速≤90km/h,则保持当前车速策略,输出加速度为0m/s
²
。
29.最终规划的目标加速度以
①②③
中最小值输出到控制模块,完成车辆加速度控制,已达成安全通过汇流道策略。
30.此外,则解除降速通过策略,车辆则不再受到本功能约束,进行自由巡航状态本发明方案是针对现有汇流道路口通行加速度规划算法中的不足和缺陷,根据自动驾驶实际需求,进行了规划方法的改进,使得加速度规划算法更能适应自动驾驶功能的升级迭代,提升功能的平台适应性和安全性能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1