一种基于Lyapunov稳定性理论的车辆稳定性控制方法
一种基于lyapunov稳定性理论的车辆稳定性控制方法
技术领域
1.本发明涉及智能车稳定性控制领域,一种基于lyapunov稳定性理论的车辆稳定性控制方法。
背景技术:
2.车辆的运动控制是指根据运动规划输出和实时反馈的车辆行驶状态来控制车辆底盘执行器,使车辆行驶时保证其操纵稳定性。
3.目前的车辆稳定性控制器中,lqr稳定性控制器的控制精度比较低。mpc稳定性控制器较非线性模型预测(nonlinear model predictive control,nmpc)稳定性控制器提高了控制器的实时性,但控制器的精度有所下降。而基于lyapunov稳定性理论的模型参考自适应控制方法可以使稳定性控制器的精度提高,而且实时性方面也优于mpc稳定性控制器。因此本发明专利提出的车辆稳定性控制方法有非常重要的意义。
技术实现要素:
4.本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种基于lyapunov稳定性理论的车辆稳定性控制方法。
5.一种基于lyapunov稳定性理论的车辆稳定性控制方法,包括如下步骤:
6.步骤1,基于二自由度车辆动力学模型,建立稳定性控制动力学模型;
[0007][0008]
式中,x为车辆稳定性误差状态变量;a表示输入状态矩阵;b表示反馈矩阵;
[0009]
步骤2,利用lyapunov稳定性理论,设计模型参考自适应控制器;添加一个附加的汽车横摆力矩δmz对汽车的稳定性进行调整,车辆附加横摆力矩δmz的表达式为:
[0010]
δmz=-k
p
x+kuδfꢀꢀꢀꢀ
(2)
[0011]
其中,δf为汽车前轮转角;k
p
为自适应反馈增益矩阵,ku为自适应前馈增益矩阵;
[0012]
步骤3,根据lyapunov稳定性理论设计的模型参考自适应控制器,在满足lyapunov稳定性理论的情况下,求解出自适应前馈增益ku和自适应反馈增益k
p
;
[0013]
步骤4,根据自适应前馈增益ku和自适应反馈增益k
p
,车辆能够动态调整附加的汽车附加横摆力矩,实现对车辆稳定性的实时控制。
[0014]
进一步的,步骤1中,状态矩阵a、反馈矩阵b、误差状态矩阵x分别表示为:
[0015]
x=[δβ δω]
t
[0016]
式中,kf和kr分别为前后轮的侧偏刚度;m为汽车总质量;lf和lr分别为前后轴到汽车质心距离;iz为汽车质心绕z轴的转动惯量;u为汽车质心处纵向速度;δω=ω
d-ω为理想横摆角速度和实际横摆角速度之差;δβ=β
d-β为理想质心侧偏角和实际质心侧偏角之
差。
[0017]
进一步的,步骤3中的自适应反馈增益k
p
和自适应前馈增益ku分别具体表示为:
[0018][0019][0020]at
p+pa=-q
ꢀꢀ
(5)
[0021]
式中,s1和s2均为合适维数的对称正定常数矩阵;矩阵p通过求解式(5)的lyapunov方程求得;k
p
(0)=[00],ku(0)=[0],分别为k
p
和ku的初始值;q为任意对称正定矩阵。
[0022]
进一步的,步骤3中基于lyapunov稳定性理论设计的稳定性控制器的稳定性验证方法为:
[0023]
正定二次型能量函数v:
[0024][0025]
式中tr(
·
)为矩阵的迹;
[0026]
将式(6)对时间求导:
[0027][0028]
将式(1)和式(2)代入式(7)得:
[0029][0030]
由于:x
t
pbk
p
x=tr(xx
t
pbk
p
)
ꢀꢀꢀꢀ
(9)
[0031]
x
t
pbkux=tr(xx
t
pbku)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0032]
将式(9)和式(10)代入式(8)可得:
[0033][0034]
结合式(11)和式(5)可得:
[0035][0036]
由于式(6)所选择的lyapunov函数v(t)》0,并且有式(12)的所以v(t)是闭环系统的一个lyapunov函数,根据lyapunov定理,可知由式(2)、式(3)、式(4)描述的闭环系统方程稳定,x(t)、k
p
、ku都是有界的;另外由于参考模型稳定,δf有界,因此控制信号式(2)有界,因此mrac系统所有信号有界,即系统具有稳定性。
[0037]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
[0038]
(1)本发明提供了一种基于lyapunov稳定性理论的车辆稳定性控制方法,在一定程度上改善了车辆稳定性控制时的实时性差、控制精度较低等缺陷。
[0039]
(2)本发明设计了一种基于lyapunov稳定性理论的车辆稳定性控制方法,基于稳定性控制动力学模型,通过lyapunov稳定性理论和lyapunov方程求得自适应控制律:自适应反馈增益kp和自适应前馈增益ku。
[0040]
(3)通过选取lyapunov能量函数,可以确保模型参考自适应系统的稳定性,使车辆具有良好的操纵稳定性,在一定程度上改善了车辆稳定性控制时控制精度和实时性等要求。
附图说明
[0041]
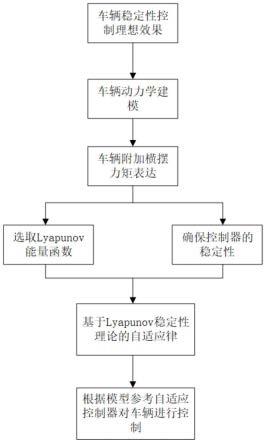
图1为本发明的基于lyapunov稳定性理论的车辆稳定性控制方法流程示意图;
[0042]
图2为本发明的车辆稳定性控制器横摆角速度曲线图;
[0043]
图3为本发明的车辆稳定性控制器质心侧偏角曲线图;
[0044]
图4为本发明的车辆稳定性控制器附加横摆力矩曲线图。
具体实施方式
[0045]
下面结合附图对本发明的技术方案做进一步的详细说明:
[0046]
本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。
[0047]
如图1所示,首先,车辆在进行稳定性控制时以横摆角速度和质心侧偏角作为评价标准,获取理想横摆角速度和理想质心侧偏角,再使用本发明的一种基于lyapunov稳定性理论的车辆稳定性控制方法对车辆进行稳定性控制。
[0048]
本发明的一种基于lyapunov稳定性理论的车辆稳定性控制方法,包括以下步骤:
[0049]
步骤1,基于二自由度车辆动力学模型,建立稳定性控制动力学模型;
[0050][0051]
x=[δβ δω]
t
[0052]
式中,x为车辆稳定性误差状态变量;a表示输入状态矩阵;b表示反馈矩阵;kf和kr分别为前后轮的侧偏刚度;m为汽车总质量;lf和lr分别为前后轴到汽车质心距离;iz为汽车质心绕z轴的转动惯量;u为汽车质心处纵向速度;。δω=ω
d-ω为理想横摆角速度和实际横摆角速度之差;δβ=β
d-β为理想质心侧偏角和实际质心侧偏角之差。
[0053]
步骤2,利用lyapunov稳定性理论,设计模型参考自适应控制器。添加一个附加的汽车横摆力矩δmz对汽车的稳定性进行调整,车辆附加横摆力矩δmz的表达式为:
[0054]
δmz=-k
p
x+kuδfꢀꢀꢀꢀꢀ
(2)
[0055]
其中,δf为汽车前轮转角;kp为非线性反馈增益矩阵,ku为非线性前馈增益矩阵,具体可表示为:
[0056][0057][0058]at
p+pa=-q
ꢀꢀꢀ
(5)
[0059]
式中,s1和s2均为合适维数的对称正定常数矩阵;矩阵p可以通过求解式(5)的lyapunov方程求得;k
p
(0)=[00],ku(0)=[0],分别为k
p
和ku的初始值。
[0060]
步骤3,根据lyapunov稳定性理论设计的稳定性控制器,在满足lyapunov稳定性理论的情况下,可以求解出自适应前馈增益ku和自适应反馈增益kp,并且能够保证控制系统的稳定性;
[0061]
正定二次型能量函数v:
[0062][0063]
将式(6)对时间求导:
[0064][0065]
将式(1)和式(2)代入式(7)得:
[0066][0067]
由于:
[0068]
x
t
pbk
p
x=tr(xx
t
pbk
p
)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0069]
x
t
pbkux=tr(xx
t
pbku)
ꢀꢀꢀꢀꢀꢀꢀ
(10)
[0070]
将式(9)和式(10)代入式(8)可得:
[0071][0072]
结合式(11)和式(5)可得:
[0073][0074]
所以,基于lyapunov稳定性的mrac自适应控制律为:
[0075][0076][0077]
步骤4,根据自适应前馈增益ku和自适应反馈增益kp,车辆可以动态调整附加横摆力矩,实现对车辆稳定性的实时控制。
[0078]
为了验证本方法的可行性与有效性,在carsim/simulink仿真平台中利用该方法进行了车辆稳定性控制仿真,并将仿真结果与传统最优二次型(lqr)控制方法进行了对比。选择在车速108km/h,路面附着系数为0.3的双移线工况对本发明专利的稳定性控制效果进行验证。
[0079]
如图2所示,两种控制方法控制的车辆横摆角速度都相对较小,当采用lqr稳定性控制方法时,横摆角速度变化曲线的峰值较无控制时下降了49.7%。采用lyapunov自适应控制方法时,横摆角速度变化曲线的峰值较无控制时下降了66.7%。说明本发明专利提出的一种基于lyapunov稳定性理论的车辆稳定性控制方法更加有效。
[0080]
如图3所示,两种控制方法控制的车辆质心侧偏角都相对较小,当采用lqr稳定性控制方法时,质心侧偏角变化曲线的峰值较无控制时下降了17.3%。采用lyapunov自适应
控制方法时,质心侧偏角变化曲线的峰值较无控制时下降了36.5%。说明本发明专利提出的一种基于lyapunov稳定性理论的车辆稳定性控制方法更加有效。
[0081]
如图4所示,相较于lqr稳定性控制方法,lyapunov自适应控制方法能够产生更大的附加横摆力矩,使汽车的实际横摆角速度和质心侧偏角更加趋近于理想值,能够保证汽车的操纵稳定性。
[0082]
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0083]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1