具有带多个齿轮组的齿轮减速模块的车桥组件的制作方法
1.本披露内容涉及一种车桥组件,该车桥组件具有可以将转子操作性地连接到驱动小齿轮的多个齿轮组。背景
2.在美国专利公开号2019/0054816中披露了一种具有电动马达模块的车桥组件。概述
3.在至少一个实施例中,提供了一种车桥组件。该车桥组件可以包括电动马达、驱动小齿轮、齿轮减速单元、第一离合器、以及第二离合器。电动马达可以具有转子,该转子可以绕轴线旋转。驱动小齿轮可以延伸穿过转子并且可以绕轴线旋转。齿轮减速单元可以包括第一齿轮组和第二齿轮组。第一齿轮组可以包括第一太阳齿轮、第一行星环齿轮、第一组行星齿轮和第一行星齿轮架。第一太阳齿轮可以操作性地连接到转子并且可以随该转子绕轴线旋转。第一行星环齿轮可以固定地定位,使得第一行星环齿轮无法绕轴线旋转。第一组行星齿轮可以与第一太阳齿轮和第一行星环齿轮啮合。第一行星齿轮架可以可旋转地支撑第一组行星齿轮。第二齿轮组可以包括第二太阳齿轮、第二行星环齿轮、第二组行星齿轮和第二行星齿轮架。第二行星环齿轮可以联接到第一行星齿轮架,使得第一行星齿轮架和第二行星环齿轮可以绕轴线一起旋转。第二组行星齿轮可以与第二太阳齿轮和第二行星环齿轮啮合。第二行星齿轮架可以可旋转地支撑第二组行星齿轮并且可以绕轴线旋转。第一离合器可以将第一行星齿轮架选择性地联接到驱动小齿轮。第二离合器可以将第一行星齿轮架选择性地联接到第二齿轮组。
4.在至少一个实施例中,提供了一种车桥组件。车桥组件可以包括电动马达、驱动小齿轮、齿轮减速单元和第一离合器。电动马达可以具有转子,该转子可以绕轴线旋转。驱动小齿轮可以延伸穿过转子并且可以绕轴线旋转。齿轮减速单元可以包括第一行星齿轮组和第二行星齿轮组。第一行星齿轮组可以包括第一太阳齿轮、第一行星环齿轮、第一组行星齿轮和第一行星齿轮架。第一太阳齿轮可以操作性地连接到转子并且可以随该转子绕轴线旋转。第一行星环齿轮可以固定地定位,使得第一行星环齿轮无法绕轴线旋转。第一组行星齿轮可以与第一太阳齿轮和第一行星环齿轮啮合。第一行星齿轮架可以可旋转地支撑第一组行星齿轮。第二行星齿轮组可以包括第二太阳齿轮、第二行星环齿轮、第二组行星齿轮和第二行星齿轮架。第二组行星齿轮可以与第二太阳齿轮和第二行星环齿轮啮合。第二行星齿轮架可以可旋转地支撑第二组行星齿轮并且可以绕轴线旋转。第一离合器可以将转子选择性地联接到第二太阳齿轮。
附图说明
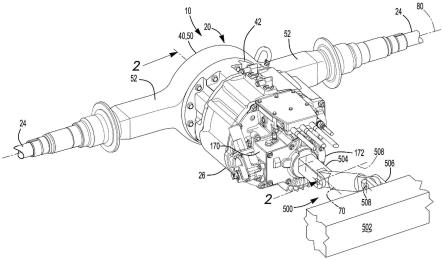
5.图1是车桥组件的示例的立体图。
6.图2是图1的车桥组件沿截面线2-2的截面视图。
7.图3是图2的一部分的放大视图,示出了齿轮减速单元和与第一齿轮比相关联的转矩路径。
8.图4示出了图2的齿轮减速单元和与第二齿轮比相关联的转矩路径。
9.图5是放大视图,示出了齿轮减速单元的第二构型和与第一齿轮比相关联的转矩路径。
10.图6示出了图5的齿轮减速单元和与第二齿轮比相关联的转矩路径。
11.图7示出了图5的齿轮减速单元和与第三齿轮比相关联的转矩路径。
12.图8是放大视图,示出了齿轮减速单元的第三构型和与第一齿轮比相关联的转矩路径。
13.图9示出了图8的齿轮减速单元和与第二齿轮比相关联的转矩路径。
14.图10示出了图8的齿轮减速单元和与第三齿轮比相关联的转矩路径。
具体实施方式
15.按照要求,本文披露了本发明的详细实施例;然而,应理解的是,所披露的实施例仅仅是本发明的可以以各种形式和替代性形式来实施的示例。附图不一定是按比例的;一些特征可以被夸大或者缩至最小以便示出具体部件的细节。因此,本文披露的具体结构性和功能性细节不应被解释为是限制性的,而是仅作为教导本领域技术人员以各种方式采用本发明的代表性基础。
16.参考图1,示出了车桥组件10的示例。车桥组件10可以被提供用于机动车辆,比如载重汽车、客车、农场设备、采矿设备、军事运输或武装车辆、或者用于陆地、空中、或海洋船舶的货物装载设备。在一个或多个实施例中,机动车辆可以包括用于运输货物的拖车。
17.车桥组件10可以向一个或多个牵引轮组件提供转矩,该一个或多个牵引轮组件可以包括安装在车轮上的轮胎。车轮可以安装到轮毂,该轮毂可以绕车轮轴线旋转。
18.一个或多个车桥组件可以被提供用于车辆。如参考图1和图2最佳示出的,车桥组件10可以包括壳体组件20、差速器组件22、至少一个半轴24、以及电动马达模块26。如图2最佳示出的,车桥组件10可以包括齿轮减速模块30。
19.壳体组件
20.参考图1,壳体组件20可以接纳车桥组件10的各种部件。此外,壳体组件20可以有助于将车桥组件10安装到车辆。在至少一种构型中,壳体组件20可以包括车桥壳体40和差速器承载件42。
21.车桥壳体40可以接纳并且可以支撑半轴24。在至少一种构型中,车桥壳体40可以包括中心部分50和至少一个臂部分52。
22.中心部分50可以被设置成靠近车桥壳体40的中心。中心部分50可以限定空腔,该空腔可以至少部分地接纳差速器组件22。如图2最佳示出的,中心部分50的下部区域可以至少部分地限定油底壳部分54,该油底壳部分可以容纳或收集润滑剂56。油底壳部分54中的润滑剂56可以通过差速器组件22的环齿轮飞溅并且被分配以润滑各种部件。
23.参考图2,中心部分50可以包括承载件安装表面58。承载件安装表面58可以有助于将差速器承载件42安装到车桥壳体40。例如,承载件安装表面58可以面向并且可以接合差速器承载件42,并且可以具有一组孔,这组孔可以与差速器承载件42上的对应孔对准。每个孔可以接纳紧固件,比如螺栓或短柱,该紧固件可以将差速器承载件42联接到车桥壳体40。
24.参考图1,一个或多个臂部分52可以从中心部分50延伸。例如,两个臂部分52可以
从中心部分50沿相反方向并且背离差速器组件22延伸。臂部分52可以具有基本上类似的构型。例如,臂部分52可以各自具有中空构型或管状构型,该中空构型或管状构型可以围绕相应的半轴24延伸并可以接纳相应的半轴,并且可以帮助将半轴24或其一部分与周围环境分离或隔离。臂部分52或其一部分可以与中心部分50一体形成、或者可以不与该中心部分一体形成。还设想到的是臂部分52可以省略。
25.参考图1和图2,差速器承载件42可以安装到车桥壳体40的中心部分50。差速器承载件42可以支撑差速器组件22并且可以有助于电动马达模块26的安装。例如,差速器承载件可以包括一个或多个轴承支撑件,该一个或多个轴承支撑件可以支撑轴承,如滚子轴承组件,该滚子轴承组件可以可旋转地支撑差速器组件22。差速器承载件42还可以包括安装凸缘60和轴承支撑壁62。
26.参考图2,安装凸缘60可以有助于电动马达模块26的安装。作为示例,安装凸缘60可以被配置为环,该环可以向外并背离轴线70延伸并且可以围绕轴线70延伸。在至少一种构型中,安装凸缘60可以包括一组紧固件孔,这组紧固件孔可以被配置用于接纳可以将电动马达模块26固定至安装凸缘60的紧固件。
27.轴承支撑壁62可以支撑轴承,这些轴承可以可旋转地支撑车桥组件10的其他部件。例如,轴承支撑壁62可以对可以可旋转地支撑驱动小齿轮84的轴承进行支撑、对可以可旋转地支撑电动马达模块26的转子的轴承进行支撑、或对两者进行支撑。轴承支撑壁62可以在背离车桥壳体40的轴向方向上延伸并且可以围绕轴线70延伸。轴承支撑壁62可以限定孔,该孔可以沿着或围绕轴线70延伸并且接纳驱动小齿轮84和可旋转地支撑驱动小齿轮84的轴承。轴承支撑壁62可以与差速器承载件42一体形成,或可以是固定或紧固到差速器承载件42的单独部件。
28.差速器组件、驱动小齿轮、和半轴
29.参考图2,差速器组件22可以至少部分地被接纳在壳体组件20的中心部分50中。差速器组件22可以绕差速器轴线80旋转并且可以将转矩传递到半轴24和车轮。差速器组件22可以操作性地连接到半轴24,并且可以准许半轴24以本领域的技术人员已知的方式以不同的旋转速度旋转。差速器组件22可以具有环齿轮82,该环齿轮可以具有与驱动小齿轮84的齿轮部分的齿配合或啮合的齿。相应地,差速器组件22可以经由环齿轮82从驱动小齿轮84接收转矩并且将转矩传递到半轴24。
30.驱动小齿轮84可以将转矩提供至环齿轮82。在包括齿轮减速模块30的车桥组件中,驱动小齿轮84可以将齿轮减速模块30操作性地连接到差速器组件22。在至少一种构型中,驱动小齿轮84可以绕轴线70旋转并且可以可旋转地支撑在另一部件(比如轴承支撑壁62)的内部。
31.参考图1,半轴24可以将转矩从差速器组件22传递到对应的轮毂和车轮。可以设置两个半轴24,使得每个半轴24延伸穿过车桥壳体40的不同臂部分52。半轴24可以沿着轴线(比如差速器轴线80)延伸,并且可以绕该轴线旋转。每个半轴24可以具有第一端部和第二端部。第一端部可以操作性地连接到差速器组件22。第二端部可以被设置成与第一端部相反并且可以操作性地连接到车轮。可选地,可以在半轴24与车轮之间提供齿轮减速。
32.电动马达模块
33.参考图2,电动马达模块26(还可以被称为电动马达)可以安装到差速器承载件42
并且可以操作性地连接到差速器组件22。例如,电动马达模块26可以经由驱动小齿轮84和齿轮减速模块向差速器组件22提供转矩,如下文将更详细地讨论。电动马达模块26可以主要设置在差速器承载件42外部。此外,电动马达模块26可以在轴向上定位在车桥壳体40与齿轮减速模块30之间。在至少一种构型中,电动马达模块26可以包括马达壳体100、冷却剂套102、定子104、转子106、至少一个转子轴承组件108、以及盖110。
34.马达壳体100可以在差速器承载件42与盖110之间延伸。马达壳体100可以安装到差速器承载件42和盖110。例如,马达壳体100可以从差速器承载件42的安装凸缘60延伸到盖110。马达壳体100可以围绕轴线70延伸、并且可以限定马达壳体空腔120。马达壳体空腔120可以设置在马达壳体100的内部并且可以具有大体柱形构型。差速器承载件42的轴承支撑壁62可以定位在马达壳体空腔120的内部。而且,马达壳体100可以围绕轴承支撑壁62连续延伸并且可以与其间隔开。在至少一种构型中,马达壳体100可以具有外侧122、内侧124、第一端表面126、第二端表面128、以及一个或多个端口130。
35.外侧122可以背向轴线70并且可以限定马达壳体100的外表面或外侧表面。
36.内侧124可以被设置成与外侧122相反。在一种或多种构型中,内侧124可以设置在距轴线70基本上恒定的径向距离处。
37.第一端表面126可以在外侧122与内侧124之间延伸。第一端表面126可以设置在马达壳体100的可以面朝差速器承载件42的端部处。例如,第一端表面126可以被设置成邻近差速器承载件42的安装凸缘60。马达壳体100和第一端表面126可以被接纳在安装凸缘60内部,或者可以不被接纳在该安装凸缘内部。
38.第二端表面128可以被设置成与第一端表面126相反。这样,第二端表面128可以设置在马达壳体100的可以面朝且可以接合盖110的端部处。第二端表面128可以在外侧122与内侧124之间延伸,并且可以被接纳在盖110内部、或者可以不被接纳在盖内部。
39.一个或多个端口130可以延伸穿过马达壳体100。端口130可以被配置为可以从外侧122延伸到内侧124的通孔。端口130可以允许冷却剂(比如流体,如水、水/防冻剂混合物等)流入和流出冷却剂套102,如下文将更详细地讨论。
40.参考图2,冷却剂套102可以帮助冷却定子104或从该定子移除热。冷却剂套102可以被接纳在马达壳体100的马达壳体空腔120中,并且可以接合马达壳体100的内侧124。冷却剂套102可以在差速器承载件42与盖110之间轴向地延伸。例如,冷却剂套102可以从差速器承载件42轴向地延伸到盖110。此外,冷却剂套102可以围绕轴线70和定子104延伸。这样,定子104可以至少部分地被接纳在冷却剂套102中并且可以被冷却剂套环绕。而且,冷却剂套102可以在径向方向上从定子104延伸到马达壳体100的内侧124。在至少一种构型中,冷却剂套102可以包括多个通道140。
41.通道140可以围绕轴线70延伸并且可以被设置成与定子104相反。通道140可以被配置成具有开口侧,该开口侧可以背向轴线70并且面朝马达壳体100的内侧124。冷却剂可以经由第一端口130提供到冷却剂套102并且可以经由第二端口130排出冷却剂套102。例如,冷却剂可以从第一端口130流到通道140中、当冷却剂流过通道140时接收来自定子104的热、并且在第二端口130处排出。一个或多个挡板可以被提供用于冷却剂套102,该冷却剂套可以颠倒或改变冷却剂流动方向,以帮助将冷却剂从第一端口130送到第二端口130。
42.定子104可以被接纳在马达壳体100中。例如,定子104可以被接纳在马达壳体空腔
120中。定子104可以相对于冷却剂套102固定地定位。例如,定子104可以围绕轴线70延伸并且可以包括定子绕组,这些定子绕组可以被接纳在冷却剂套102内部并且可以相对于该冷却剂套固定地定位。
43.转子106可以围绕轴线70延伸并且可以绕该轴线旋转。转子106可以被接纳在定子104、冷却剂套102和马达壳体100的马达壳体空腔120的内部。转子106可以绕轴线70相对于差速器承载件42和定子104旋转。此外,转子106可以与定子104间隔开,但可以被设置成紧邻定子104。转子106可以包括可以有助于电流产生或者可以是基于感应的磁体或铁磁材料。转子106可以围绕轴承支撑壁62延伸并且可以由该轴承支撑壁支撑。
44.一个或多个转子轴承组件108可以可旋转地支撑转子106。例如,转子轴承组件108可以接纳差速器承载件42的轴承支撑壁62,并且可以被接纳在转子106内部。转子106可以操作性地连接到驱动小齿轮84。例如,联接器(比如转子输出凸缘150)可以将转子106操作性地连接到齿轮减速模块30,该齿轮减速模块进而可以与驱动小齿轮84操作性地连接。
45.参考图2,盖110可以安装到马达壳体100,并且可以被设置成与车桥壳体40和差速器承载件42相反。例如,盖110可以安装到马达壳体100的可以被设置成与差速器承载件42相反的端部或端表面,比如第二端表面128。这样,盖110可以与差速器承载件42间隔开并且可以不接合该差速器承载件。盖110可以以不同的构型来提供。在至少一种构型中,盖110可以包括第一侧160和第二侧162。第一侧160可以面朝马达壳体100并且可以与之接合。第二侧162可以被设置成与第一侧160相反。第二侧162可以背向马达壳体100并且可以被设置成与马达壳体100相反。盖110还可以包括或限定马达盖开口,该马达盖开口可以是驱动小齿轮84可以延伸穿过的通孔。
46.齿轮减速模块和离合器
47.参考图2,示出了齿轮减速模块30的示例。齿轮减速模块30可以在电动马达模块26与差速器组件22之间传递转矩。这样,齿轮减速模块30可以操作性地连接电动马达模块26和差速器组件22。
48.齿轮减速模块30可以设置在差速器承载件42的外部,并且可以主要设置在电动马达模块26的外部,或者可以整体设置在电动马达模块26的外部,从而提供可以在期望齿轮减速时安装到电动马达模块26的模块化构造。例如,齿轮减速模块30可以包括齿轮减速模块壳体170,该齿轮减速模块壳体可以接纳齿轮减速模块30的齿轮。齿轮减速模块壳体170可以以不同的构型来提供。例如,齿轮减速模块壳体170可以是安装到盖110的单独部件,或可以与盖110一体形成。齿轮减速模块壳体170可以在背离电动马达模块26延伸的方向上从盖110的第二侧162延伸。齿轮减速模块盖172可以设置在齿轮减速模块壳体170上,并且可以是可移除的以提供对位于齿轮减速模块壳体170内部的部件的接近。
49.齿轮减速模块可以以不同的构型来提供并且可以包括操作性地彼此连接的多个齿轮组。这些齿轮组可以被配置为周转齿轮组,其中一个或多个行星齿轮可以围绕中心太阳齿轮公转或旋转。每个行星齿轮可以绕对应的轴线旋转,该对应的轴线可以定位在距中心太阳齿轮围绕旋转的轴线恒定或基本上恒定的径向距离处。为清楚起见,每个齿轮组在下文中用不同的名称指定。
50.下文描述了并且在图3至图10最佳示出了齿轮减速模块30、30’、30”的三个主要构型。应理解的是,每种齿轮减速模块构型可以被提供用于具有如上所述部件的车桥组件(例
如,具有壳体组件20、差速器组件22、至少一个半轴24、电动马达模块26、驱动小齿轮84、齿轮减速模块壳体170等的车桥组件)。相应地,图3至图10中所示的放大视图更好地描绘了每种齿轮减速模块构型,而不是车桥组件的其余部分。每个放大视图是沿轴线70的截面视图。在这些附图中,电动马达模块26与驱动小齿轮84之间的转矩传递路径用直线双虚线表示。在下文描述的构型中,转矩传递路径主要在将转矩从电动马达模块26传递至驱动小齿轮84的背景下描述;然而,转矩传递路径可以是双向的、并且可以在各种操作条件下(比如在再生制动期间)促进转矩从驱动小齿轮84传递到电动马达模块26。
51.参考图3和图4,示出了齿轮减速模块30的第一构型。齿轮减速模块30可以包括第一齿轮组200和第二齿轮组202。
52.第一齿轮组200可以沿轴线70在轴向上定位在电动马达模块26与第二齿轮组202之间。第一齿轮组200可以被配置为行星齿轮组。例如,第一齿轮组200可以包括第一太阳齿轮210、第一组行星齿轮212、第一行星环齿轮214和第一行星齿轮架216。
53.第一太阳齿轮210可以操作性地连接到转子106。例如,第一太阳齿轮210可以经由转子输出凸缘150操作性地连接到转子106。这样,第一太阳齿轮210可以随转子106和转子输出凸缘150绕轴线70旋转。可选地,第一太阳齿轮210可以围绕驱动小齿轮84延伸并且可以接纳该驱动小齿轮。
54.第一组行星齿轮212可以可旋转地设置在第一太阳齿轮210与第一行星环齿轮214之间。每个第一行星齿轮212可以具有齿,这些齿可以与可以背离轴线70延伸的第一太阳齿轮210的齿、以及可以与可以朝向轴线70延伸的第一行星环齿轮214的齿啮合。每个第一行星齿轮212可以绕对应的行星齿轮轴线218旋转。
55.第一行星环齿轮214可以围绕轴线70延伸并且可以接纳第一组行星齿轮212。第一行星环齿轮214可以固定地定位,使得第一行星环齿轮214不可绕轴线70旋转。例如,第一行星环齿轮214可以被接纳在齿轮减速模块壳体170内部并且可以固定地联接到该齿轮减速模块壳体,使得第一行星环齿轮214无法绕轴线70旋转。
56.第一行星齿轮架216可以可旋转地支撑第一组行星齿轮212。此外,第一行星齿轮架216可以绕轴线70旋转。第一行星齿轮架216可以朝向第二齿轮组202延伸并且可以操作性地连接到该第二齿轮组。在至少一种构型中,第一行星齿轮架216可以包括支撑部分220、第一凸缘部分222和连接部分224。
57.支撑部分220可以可旋转地支撑第一组行星齿轮212。支撑部分220可以具有任何合适的构型。例如,支撑部分220可以包括多个销,这些销可以沿每个行星齿轮轴线218延伸并且可以被接纳在每个第一行星齿轮212中的孔内。轴承(比如滚动元件轴承组件)可以被接纳在每个第一行星齿轮212中的孔内,并且可以围绕每个销延伸以帮助可旋转地支撑每个第一行星齿轮212。
58.第一凸缘部分222可以从支撑部分220的端部朝向轴线70延伸。第一凸缘部分222可以沿轴线70在轴向上定位在第一组行星齿轮212与第二齿轮组202之间。
59.连接部分224可以从第一凸缘部分222的端部延伸。在至少一种构型中,连接部分224可以大致平行于轴线70延伸。连接部分224可以被设置成比支撑部分220更靠近轴线70。
60.支撑轴承组件226可以可旋转地支撑第一行星齿轮架216。支撑轴承组件226可以从支撑结构(比如齿轮减速模块壳体170)延伸到第一行星齿轮架216。例如,支撑轴承组件
226可以被接纳在齿轮减速模块壳体170内部,并且第一行星齿轮架216可以被接纳在支撑轴承组件226内部。支撑轴承组件226可以被设置成靠近第一行星齿轮架216的连接部分224,并且可以在轴向上定位在第一凸缘部分222与第二齿轮组202之间。这样,支撑轴承组件226可以沿轴线70在轴向上定位在第一齿轮组200的各个部件与第二齿轮组202之间。
61.第二齿轮组202可以操作性地连接到第一齿轮组200。尽管有第一行星齿轮架216,但第二齿轮组202可以与第一齿轮组200间隔开。在至少一种构型中,第二齿轮组202可以包括第二太阳齿轮230、第二组行星齿轮232、第二行星环齿轮234和第二行星齿轮架236。
62.第二太阳齿轮230可以固定地定位,使得第二太阳齿轮230不可绕轴线70旋转。例如,第二太阳齿轮230可以被接纳在齿轮减速模块壳体170内部并且可以固定地联接到该齿轮减速模块壳体,使得第二太阳齿轮230无法绕轴线70旋转。
63.第二组行星齿轮232可以可旋转地设置在第二太阳齿轮230上。每个第二行星齿轮232可以具有齿,这些齿可以与可以背离轴线70延伸的第二太阳齿轮230的齿、以及可以与可以朝向轴线70延伸的第二行星环齿轮234的齿啮合。每个第二行星齿轮232可以绕对应的行星齿轮轴线旋转,该行星齿轮轴线可以与同第一组行星齿轮212相关联的行星齿轮轴线218设置在距轴线70相同距离或不同距离处。在至少一种构型中,第二组行星齿轮232的构件可以具有比第一组行星齿轮212的构件更大的直径。第二组行星齿轮232可以被可旋转地支撑在第二行星齿轮架236上。每个第二行星齿轮232可以在轴向上定位在第一齿轮组200与齿轮减速模块盖172之间。
64.第二行星环齿轮234可以围绕轴线70延伸并且可以接纳第二组行星齿轮232。第二行星环齿轮234可以相对于齿轮减速模块壳体170绕轴线70旋转。在至少一种构型中,第二行星环齿轮234可以包括连接凸缘部分240。连接凸缘部分240或其一部分可以朝向轴线70和第一行星齿轮架216的连接部分224延伸。
65.第二支撑轴承组件242可以可旋转地支撑第二行星环齿轮234。第二支撑轴承组件242可以从支撑结构(比如齿轮减速模块壳体170)延伸到第二行星环齿轮234。例如,第二支撑轴承组件242可以被接纳在齿轮减速模块壳体170内部,并且第二行星环齿轮234可以被接纳在第二支撑轴承组件242内部。
66.第二行星齿轮架236可以可旋转地支撑第二组行星齿轮232。此外,第二行星齿轮架236可以与驱动小齿轮84绕轴线70旋转。第二行星齿轮架236可以以任何合适的方式连接到驱动小齿轮84。例如,第二行星齿轮架236可以包括凸缘部分250,该凸缘部分可以从支撑构件252延伸,该支撑构件可以绕轴线70旋转。凸缘部分250可以联接到支撑构件252或与该支撑构件一体形成。凸缘部分250可以在轴向上定位在第二行星环齿轮234的连接凸缘部分240与第二组行星齿轮232之间。
67.支撑构件252可以直接或间接地联接到驱动小齿轮84。在至少一种构型中,支撑构件252可以设置在第二太阳齿轮230内部并且可以由一个或多个轴承256可旋转地支撑。例如,轴承256可以围绕支撑构件252延伸并且可以从支撑构件252延伸到第二太阳齿轮230。还设想到的是可以省略支撑构件252,比如通过增加驱动小齿轮84的轴部分的长度。还设想到的是支撑构件252可以是单个整体部件或可以由多个部件构成。
68.在下文描述的构型中,一个或多个离合器可以与齿轮减速模块30协作,以提供期望的齿轮减速比并改变在电动马达模块26与差速器组件22之间传递并且因此传递到车桥
组件10的半轴24或从该半轴传递的转矩。离合器可以控制一个部件相对于另一部件的旋转。例如,离合器可以将两个部件(比如,驱动部件和从动部件)连接和断开。离合器可以具有任何合适的构型。例如离合器可以被配置为摩擦离合器、电磁离合器、液压离合器等。离合器可以被配置为滑动离合器或非滑动离合器。滑动离合器可以以不同的构型来提供,其示例为多片式离合器。
69.在附图中,离合器用在两个部件之间延伸的方框表示。当离合器接合以将两个部件彼此联接、连接、或锁定时,该框打了个x。当离合器脱接合并且两个部件彼此脱联接、断开或解锁时,该框是空的并且未打x。两个可旋转部件可以在离合器连接这两个部件时一起旋转,而在离合器不联接或连接这两个可旋转部件时无法一起旋转。当离合器将可旋转部件连接到静止或不可旋转部件时可以抑制可旋转部件旋转,并且当离合器不联接或连接这两个部件时可旋转部件可以相对于静止或不可旋转部件旋转。这些方框可以表示单独的离合器或可以表示可以共享共用部件的离合器。例如,被配置为换档套环的离合器可以具有齿,这些齿可以根据换档套环的轴向位置与不同部件的齿啮合。因此,一个方框可以表示换档套环可以联接到第一部件或与第一部件脱联接的大致位置,而第二方框可以表示换档套环可以联接到第二部件或与第二部件脱联接的大致位置。离合器可以用任何合适类型的致动器以本领域技术人员已知的方式来操作或致动。
70.参考图3,展示了两个离合器。这些离合器可以被称为第一离合器260和第二离合器262。
71.第一离合器260可以将第一行星齿轮架216选择性地联接到驱动小齿轮84。例如,当第一离合器260接合时,第一离合器260可以将第一行星齿轮架216直接或经由支撑构件252连接到驱动小齿轮84,使得第一行星齿轮架216和驱动小齿轮84可以绕轴线70一起旋转。反过来,第一离合器260可以脱接合以准许第一行星齿轮架216与驱动小齿轮84之间的相对旋转。第一离合器260被展示为在第一行星齿轮架216的连接部分224与支撑构件252之间延伸;然而,还设想到了其他构型和定位。例如,可以省略支撑构件252,并且第一离合器260可以从驱动小齿轮84延伸。
72.第二离合器262可以将第一行星齿轮架216选择性地联接到第二齿轮组202。例如,当第二离合器262接合时,第二离合器262可以将第一行星齿轮架216连接到第二行星环齿轮234,使得第一行星齿轮架216和第二行星环齿轮234可以绕轴线70一起旋转。反过来,第二离合器262可以脱接合以准许第一行星齿轮架216与第二行星环齿轮234之间的相对旋转。第二离合器262被展示为在第一行星齿轮架216的连接部分224与第二行星环齿轮234的连接凸缘部分240之间延伸;然而,还设想到了其他构型和定位。例如,连接凸缘部分可以被提供用于第一行星齿轮架216并且第二离合器262可以定位成更远离轴线70,使得第二离合器262可以连接或断开连接凸缘部分和第二行星环齿轮234。
73.参考图3,展示了提供第一齿轮比的离合器。第一离合器260脱接合,而第二离合器262接合。转矩可以比如经由转子输出凸缘150从转子106传递到第一太阳齿轮210,经由第一组行星齿轮212从第一太阳齿轮210传递到第一行星齿轮架216,经由第二离合器262从第一行星齿轮架216传递到第二行星环齿轮234,经由第二组行星齿轮232从第二行星环齿轮234传递到第二行星齿轮架236,以及经由支撑构件252(如果提供的话)从第二行星齿轮架236传递到驱动小齿轮84。这样,当提供第一齿轮比时,第一太阳齿轮210和第一行星齿轮架
216可以相对于驱动小齿轮84绕轴线70旋转。
74.参考图4,展示了提供第二齿轮比的离合器。第一离合器260接合,而第二离合器262脱接合。转矩可以比如经由转子输出凸缘150从转子106传递到第一太阳齿轮210,经由第一组行星齿轮212从第一太阳齿轮210传递到第一行星齿轮架216,以及经由第一离合器260和支撑构件252(如果提供的话)从第一行星齿轮架216传递到驱动小齿轮84。这样,转矩无法经由第二离合器262在第一齿轮组200与第二齿轮组202之间传递。
75.参考图5至图7,示出了齿轮减速模块30’的第二构型。在此构型中,齿轮减速模块30’可以包括第一齿轮组200、第二齿轮组202和第三齿轮组304。第三齿轮组304可以沿轴线70在轴向上定位在第二齿轮组202与齿轮减速模块盖172之间。这样,第一齿轮组200可以沿轴线70在轴向上定位在电动马达模块26与第二齿轮组202之间,并且第二齿轮组202可以在轴向上定位在第一齿轮组200与第三齿轮组304之间。
76.第一齿轮组200可以与之前描述的第一齿轮组相同。
77.第二齿轮组202可以与上述第二齿轮组相同,不用之处在于第二太阳齿轮230可以选择性地联接到比如齿轮减速模块壳体170等静止部件。
78.第三齿轮组304可以被配置为行星齿轮组。例如,第三齿轮组304可以包括第三太阳齿轮310、第三组行星齿轮312、第三行星环齿轮314和第三行星齿轮架316。
79.第三太阳齿轮310可以相对于第二太阳齿轮230固定地定位。这样,第三太阳齿轮310和第二太阳齿轮230无法相对于彼此旋转。第三太阳齿轮310可以围绕支撑构件252延伸并且可以接纳该支撑构件。
80.第三组行星齿轮312可以可旋转地设置在第三太阳齿轮310与第三行星环齿轮314之间。每个第三行星齿轮312可以具有齿,这些齿可以与可以背离轴线70延伸的第三太阳齿轮310的齿、以及可以与可以朝向轴线70延伸的第三行星环齿轮314的齿啮合。第三组行星齿轮312的构件可以具有与第二组行星齿轮232的构件相同或不同的直径。在所示的构型中,第二组行星齿轮232和第三组行星齿轮312被展示为具有相同的直径并且可绕可以定位在距轴线70的共同径向距离处的轴线旋转。
81.第三行星环齿轮314可以围绕轴线70延伸并且可以接纳第三组行星齿轮312。第三行星环齿轮314可以绕轴线70旋转。例如,第三行星环齿轮314可以被接纳在内部并且可以相对于齿轮减速模块壳体170绕轴线70旋转。
82.第三支撑轴承组件318可以可旋转地支撑第三行星环齿轮314。第三支撑轴承组件318可以从支撑结构(比如齿轮减速模块壳体170)延伸到第三行星环齿轮314。例如,第三支撑轴承组件318可以被接纳在齿轮减速模块壳体170内部,并且第三行星环齿轮314可以被接纳在第三支撑轴承组件318内部。
83.第三行星齿轮架316可以可旋转地支撑第三组行星齿轮312。此外,第三行星齿轮架316可以选择性地联接到静止部件,比如齿轮减速模块壳体170。在至少一种构型中,第三行星齿轮架316可以包括支撑部分330和第三凸缘部分332。
84.支撑部分330可以可旋转地支撑第三组行星齿轮312。支撑部分330可以具有任何合适的构型。例如,支撑部分330可以包括多个销,这些销可以被接纳在每个第三行星齿轮312中的孔内。滚子轴承组件可以被接纳在每个第三行星齿轮312中的孔内,并且可以围绕每个销延伸,以帮助可旋转地支撑每个第三行星齿轮312。每个销可以沿着对应的行星齿轮
轴线延伸。
85.第三凸缘部分332可以从支撑部分330的端部延伸。例如,第三凸缘部分可以背离轴线70延伸。第三凸缘部分332可以沿轴线70在轴向上定位在第二齿轮组202与第三组行星齿轮312之间。第三凸缘部分332可以在不同的构型中省略。
86.参考图5,展示了五个离合器。这些离合器可以被称为第一离合器360、第二离合器362、第三离合器364、第四离合器366以及第五离合器368。
87.第一离合器360可以以与前述第一离合器260相同的方式将第一行星齿轮架216选择性地联接到驱动小齿轮84,比如经由支撑构件252。这样,当第一离合器360接合时,第一行星齿轮架216和驱动小齿轮84可以绕轴线70一起旋转。反过来,第一离合器360可以脱接合以准许第一行星齿轮架216与驱动小齿轮84之间的相对旋转。
88.第二离合器362可以以与前述第二离合器262相同的方式将第一行星齿轮架216选择性地联接到第二齿轮组202。这样,当第二离合器262接合时,第一行星齿轮架216和第二行星环齿轮234可以绕轴线70一起旋转。反过来,第二离合器262可以脱接合以准许第一行星齿轮架216与第二行星环齿轮234之间的相对旋转。
89.第三离合器364可以将第二齿轮组202、第三齿轮组304或两者选择性地联接到驱动小齿轮84。例如,支撑构件252可以分成两部分,比如第一支撑构件部分370和第二支撑构件部分372,并且第三离合器364可以将第一支撑构件部分370选择性地连接到第二支撑构件部分372。第一支撑构件部分370可以固定地联接到第三行星环齿轮314并且可以随第三行星环齿轮旋转,而第二支撑构件部分372可以联接到驱动小齿轮84并且可以随该驱动小齿轮旋转。这样,当第三离合器364接合时,第三离合器364可以将第一支撑构件部分370连接到第二支撑构件部分372,使得第一支撑构件部分370和第二支撑构件部分372可以绕轴线70一起旋转。反过来,第三离合器364可以脱接合以准许第一支撑构件部分370与第二支撑构件部分372之间的相对旋转。第三离合器364被展示为大致定位在第一齿轮组200与第二齿轮组202之间;然而,还设想到了其他构型和定位。例如,第三离合器364可以定位成更远离驱动小齿轮84。
90.第四离合器366可以将第二太阳齿轮230和第三太阳齿轮310选择性地联接到静止部件。例如,第四离合器366可以将第二太阳齿轮230和第三太阳齿轮310连接到齿轮减速模块壳体170,使得可以抑制第二太阳齿轮230和第三太阳齿轮310绕轴线70旋转。反过来,第四离合器366可以脱接合以准许第二太阳齿轮230和第三太阳齿轮310相对于齿轮减速模块壳体170绕轴线70一起旋转。第四离合器366被展示为设置在齿轮减速模块壳体170附近;然而,第四离合器366可以设置在其他位置,比如更靠近轴线70。
91.第五离合器368可以将第三行星齿轮架316选择性地联接到静止部件。例如,第五离合器368可以将第三行星齿轮架316连接到齿轮减速模块壳体170,使得可以抑制第三行星齿轮架316绕轴线70旋转。反过来,第五离合器368可以脱接合以准许第三行星齿轮架316相对于齿轮减速模块壳体170绕轴线70旋转。第五离合器368被展示为设置在齿轮减速模块壳体170附近;然而,第五离合器368可以设置在其他位置,比如更靠近轴线70。
92.参考图5,展示了提供第一齿轮比的离合器。在至少一种构型中,第一齿轮比可以是低速齿轮比。第一离合器360和第四离合器366可以脱接合,而第二离合器362、第三离合器364和第五离合器368可以接合。转矩可以比如经由转子输出凸缘150从转子106传递到第
一太阳齿轮210,经由第一组行星齿轮212从第一太阳齿轮210传递到第一行星齿轮架216,经由第二离合器362从第一行星齿轮架216传递到第二行星环齿轮234,经由第二组行星齿轮232从第二行星环齿轮234传递到第二行星齿轮架236、第二太阳齿轮230和第三太阳齿轮310,经由第三组行星齿轮312从第三太阳齿轮310传递到第三行星环齿轮314,以及经由第一支撑构件部分370、第三离合器364和第二支撑构件部分372从第二行星齿轮架236和第三行星环齿轮314传递到驱动小齿轮84。这样,当提供第一齿轮比时,第二太阳齿轮230和第三太阳齿轮310可以相对于驱动小齿轮84绕轴线70旋转。
93.参考图6,展示了提供第二齿轮比的离合器。在至少一种构型中,第二齿轮比可以是可以与第一齿轮比不同的中等或中速齿轮比。第一离合器360和第五离合器368可以脱接合,而第二离合器362、第三离合器364和第四离合器366可以接合。转矩可以比如经由转子输出凸缘150从转子106传递到第一太阳齿轮210,经由第一组行星齿轮212从第一太阳齿轮210传递到第一行星齿轮架216,经由第二离合器362从第一行星齿轮架216传递到第二行星环齿轮234,经由第二组行星齿轮232从第二行星环齿轮234传递到第二行星齿轮架236,以及经由第一支撑构件部分370、第三离合器364和第二支撑构件部分372从第二行星齿轮架236传递到驱动小齿轮84。这样,当提供第二齿轮比时,转矩无法通过第三齿轮组304传递,并且第三行星齿轮架316可以相对于驱动小齿轮84绕轴线70旋转。
94.参考图7,展示了提供第三齿轮比的离合器。在至少一种构型中,第三齿轮比可以是可以与第一齿轮比和第二齿轮比不同的高速齿轮比。第一离合器360可以接合,而第二离合器362、第三离合器364、第四离合器366和第五离合器368可以脱接合。转矩可以比如经由转子输出凸缘150从转子106传递到第一太阳齿轮210,经由第一组行星齿轮212从第一太阳齿轮210传递到第一行星齿轮架216,以及经由第一离合器360和第二支撑构件部分372从第一行星齿轮架216传递到驱动小齿轮84。这样,当提供第三齿轮比时,转矩无法通过第二齿轮组202和第三齿轮组304传递。
95.还设想到的是图5至图7中的构型可以设置有更少的离合器。例如,第二离合器362和第三离合器364可以由刚性连接代替。然而,这将导致附加的行星齿轮在高速齿轮比或在第三齿轮比接合时旋转,这可能会增加能量使用。
96.参考图8至图10,示出了齿轮减速模块30”的第三构型。在此构型中,齿轮减速模块30”可以包括第一行星齿轮组400和第二行星齿轮组402。
97.第一行星齿轮组400可以沿轴线70在轴向上定位在电动马达模块26与第二行星齿轮组402之间。在至少一种构型中,第一行星齿轮组400可以包括第一太阳齿轮410、第一组行星齿轮412、第一行星环齿轮414和第一行星齿轮架416。
98.第一太阳齿轮410可以操作性地连接到转子106。例如,第一太阳齿轮410可以经由转子输出凸缘150操作性地连接到转子106。这样,第一太阳齿轮410可以随转子106和转子输出凸缘150绕轴线70旋转。第一太阳齿轮410可以围绕驱动小齿轮84延伸并且可以取决于驱动小齿轮84的长度而接纳该驱动小齿轮。
99.第一组行星齿轮412可以可旋转地设置在第一太阳齿轮410与第一行星环齿轮414之间。每个第一行星齿轮412可以具有齿,这些齿可以与可以背离轴线70延伸的第一太阳齿轮410的齿、以及可以与可以朝向轴线70延伸的第一行星环齿轮414的齿啮合。此外,每个第一行星齿轮412可以绕对应的行星齿轮轴线418旋转。
100.第一行星环齿轮414可以围绕轴线70延伸并且可以接纳第一组行星齿轮412。第一行星环齿轮414可以固定地定位,使得第一行星环齿轮414不可绕轴线70旋转。例如,第一行星环齿轮414可以被接纳在静止部件(比如齿轮减速模块壳体170)内部并且可以固定地联接到该静止部件,使得第一行星环齿轮414无法绕轴线70旋转。
101.第一行星齿轮架416可以可旋转地支撑第一组行星齿轮412。此外,第一行星齿轮架416可以绕轴线70旋转。第一行星齿轮架416可以朝向第二行星齿轮组402延伸并且可以操作性地连接到该第二行星齿轮组。
102.第二行星齿轮组402可以沿轴线70在轴向上定位成比第一行星齿轮组400更远离电动马达模块26。在至少一种构型中,第二行星齿轮组402可以包括第二太阳齿轮420、第二组行星齿轮422、第二行星环齿轮424和第二行星齿轮架426。
103.第二太阳齿轮420可以经由第五离合器选择性地联接到静止部件,如下文将讨论的。
104.第二组行星齿轮422可以可旋转地设置在第二太阳齿轮420与第二行星环齿轮424之间。每个第二行星齿轮422可以具有齿,这些齿可以与可以背离轴线70延伸的第二太阳齿轮420的齿、以及可以与可以朝向轴线70延伸的第二行星环齿轮424的齿啮合。此外,每个第二行星齿轮422可以绕对应的行星齿轮轴线旋转,该行星齿轮轴线可以与同第一组行星齿轮412相关联的行星齿轮轴线418不同。
105.第二行星环齿轮424可以围绕轴线70延伸并且可以接纳第二组行星齿轮422。第二行星环齿轮424可以选择性地联接到静止部件,比如齿轮减速模块壳体170。
106.第二行星齿轮架426可以可旋转地支撑第二组行星齿轮422。此外,第二行星齿轮架426可以绕轴线70旋转。第二行星齿轮架426可以固定地联接到支撑构件252或与该支撑构件一体形成。
107.参考图8,展示了五个离合器。这些离合器可以被称为第一离合器430、第二离合器432、第三离合器434、第四离合器436以及第五离合器438。
108.第一离合器430可以将第一太阳齿轮410选择性地联接到第二太阳齿轮420。这样,第一离合器430可以用于将转子106选择性地联接到第二太阳齿轮420。例如,当第一离合器430接合时,第一离合器430可以将第一太阳齿轮410连接到第二太阳齿轮420,使得第一太阳齿轮410和第二太阳齿轮420可以绕轴线70一起旋转。反过来,第一离合器430可以脱接合以准许第一太阳齿轮410与第二太阳齿轮420之间的相对旋转。
109.第二离合器432可以将第一行星齿轮架416选择性地联接到第二太阳齿轮420。例如,当第二离合器432接合时,第二离合器432可以将第一行星齿轮架416连接到第二太阳齿轮420,使得第一行星齿轮架416和第二太阳齿轮420可以绕轴线70一起旋转。反过来,第二离合器432可以脱接合以准许第一行星齿轮架416与第二太阳齿轮420之间的相对旋转。
110.第三离合器434可以将第一行星齿轮架416选择性地联接到第二行星环齿轮424。例如,当第三离合器434接合时,第三离合器434可以将第一行星齿轮架416连接到第二行星环齿轮424,使得第一行星齿轮架416和第二行星环齿轮424可以绕轴线70一起旋转。反过来,第三离合器434可以脱接合以准许第一行星齿轮架416与第二行星环齿轮424之间的相对旋转。
111.第四离合器436可以控制第二行星环齿轮424绕轴线70的旋转。例如,当第四离合
器436接合时,第四离合器436可以将第二行星环齿轮424连接到静止部件(比如齿轮减速模块壳体170),使得第二行星环齿轮424无法绕轴线70旋转。反过来,第四离合器436可以脱接合以准许第二行星环齿轮424相对于齿轮减速模块壳体170绕轴线70旋转。
112.第五离合器438可以控制第二太阳齿轮420绕轴线70的旋转。例如,当第五离合器438接合时,第五离合器438可以将第二太阳齿轮420连接到静止部件(比如齿轮减速模块壳体170),使得第二太阳齿轮420无法绕轴线70旋转。反过来,第五离合器438可以脱接合以准许第二太阳齿轮420相对于齿轮减速模块壳体170绕轴线70旋转。
113.参考图8,展示了提供第一齿轮比的离合器。在至少一种构型中,第一齿轮比可以是低速齿轮比。第一离合器430、第三离合器434和第五离合器438可以脱接合,而第二离合器432和第四离合器436可以接合。转矩可以比如经由转子输出凸缘150从转子106传递到第一太阳齿轮410,经由第一组行星齿轮412从第一太阳齿轮410传递到第一行星齿轮架416,经由第二离合器432从第一行星齿轮架416传递到第二太阳齿轮420,经由第二组行星齿轮422从第二太阳齿轮420传递到第二行星齿轮架426,以及经由支撑构件252从第二行星齿轮架426传递到驱动小齿轮84,注意,支撑构件252可以与第二行星齿轮架426一体形成或作为单独的部件附接。这样,当提供第一齿轮比时,第一太阳齿轮410和第二太阳齿轮420可以相对于驱动小齿轮84绕轴线70旋转,并且可以相对于彼此以不同的速度旋转。
114.参考图9,展示了提供第二齿轮比的离合器。在至少一种构型中,第二齿轮比可以是可以与第一齿轮比不同的中等或中速齿轮比。第三离合器434和第五离合器438可以接合,而第一离合器430、第二离合器432和第四离合器436可以脱接合。转矩可以比如经由转子输出凸缘150从转子106传递到第一太阳齿轮410,经由第一组行星齿轮412从第一太阳齿轮410传递到第一行星齿轮架416,经由第三离合器434从第一行星齿轮架416传递到第二行星环齿轮424,经由第二组行星齿轮422从第二行星环齿轮424传递到第二行星齿轮架426,以及经由支撑构件252从第二行星齿轮架426传递到驱动小齿轮84。这样,当提供第二齿轮比时,第一太阳齿轮410而不是第二太阳齿轮420可以相对于驱动小齿轮84绕轴线70旋转。
115.参考图10,展示了提供第三齿轮比的离合器。在至少一种构型中,第三齿轮比可以是可以与第一齿轮比和第二齿轮比不同的高速齿轮比。第一离合器430和第四离合器436可以接合,而第二离合器432、第三离合器434和第五离合器438可以脱接合。转矩可以比如经由转子输出凸缘150从转子106传递到第一太阳齿轮410,经由第一离合器430从第一太阳齿轮410传递到第二太阳齿轮420,经由第二组行星齿轮422从第二太阳齿轮420传递到第二行星齿轮架426,以及经由支撑构件252从第二行星齿轮架426传递到驱动小齿轮84。这样,当提供第三齿轮比时,第一太阳齿轮410和第二太阳齿轮420可以相对于驱动小齿轮84绕轴线70以相同的速度旋转。
116.参考图1,车桥组件10可以可选地包括隔离器支撑件500。隔离器支撑件500可以帮助支撑车桥组件10的、被设置成距车桥壳体40和差速器轴线80最远的端部。在至少一种构型中,隔离器支撑件500可以从齿轮减速模块壳体170或齿轮减速模块盖172延伸到横梁502,该横梁可以是车辆底盘一部分。例如,横梁502可以在横向方向上在车辆的两个车架纵梁之间延伸。隔离器支撑件500可以包括第一部分504和第二部分506,该第一部分可以安装在齿轮减速模块壳体170或齿轮减速模块盖172上,该第二部分可以安装到横梁502。隔离器支撑件500可以允许第一部分504相对于第二部分506绕隔离器安装轴线508枢转,并且可以
帮助限制齿轮减速模块壳体170的移动和加速。例如,设想到的是,隔离器支撑件500的一部分可以包括弹性构件,该弹性构件可以被接纳在第一部分504、第二部分506或这两者中的孔中。还设想到的是,第一部分504或第二部分506可以被配置为减震器。隔离器支撑件500可以被提供用于先前讨论的构型中的任一构型。
117.具有如上所述的齿轮组构型的车桥组件可以提供多个齿轮比或多个速度,同时提供更紧凑的封装空间。而且,与双速单行星齿轮构型相比,这些齿轮组构型可以允许减小齿轮比之间的差异,这可以帮助改善齿轮减速单元的效率和车辆的驾驶性能。此外,上述构型可以允许每个齿轮比是相对于转子速度的齿轮减速,这可以帮助降低齿轮组的旋转速度并帮助减少与齿轮组相关联的滚子轴承组件的发热,并且提高轴承寿命。
118.虽然上文描述了示例性实施例,但是这些实施例并不旨在描述本发明的所有可能形式。而是,本说明书中使用的词语是说明而非限制性的词语,并且应当理解的是,在不脱离本发明的精神和范围的情况下,可以做出各种改变。此外,可以组合各种实现的实施例的特征以形成本发明的另外实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1