供电控制装置、供电装置及输入输出装置的制作方法
1.本发明涉及供电控制装置、供电装置及输入输出装置。
背景技术:
2.以往,已知有在设置于地面的供电装置与车辆之间以非接触的方式传送电力的技术。例如,在专利文献1中记载了:从车辆向供电装置以无线的方式发送供电要求,根据供电要求而进行从供电装置向车辆的非接触供电。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018-157686号公报
技术实现要素:
6.发明所要解决的课题
7.然而,在车辆通过供电装置的上方时,车辆的乘员(例如驾驶员)未必始终希望基于非接触供电的蓄电池的充电。例如,在蓄电池的蓄电量充分的情况或计划着外部电源或再生电力对蓄电池的充电的情况下,从供电装置向车辆供给电力的必要性低。尤其是,在对于向车辆的非接触供电收取利用费用的情况下,希望尽可能地避免无用的供电。
8.于是,鉴于上述课题,本发明的目的在于抑制违背车辆的乘员的意向而进行从供电装置向车辆的非接触供电。
9.用于解决课题的手段
10.本公开的主旨如下。
11.(1)一种供电控制装置,设置于构成为由供电装置以非接触的方式供电的车辆,其中,具备:供电要求部,要求从所述供电装置向所述车辆的非接触供电;及意向确认部,向所述车辆的乘员确认所述非接触供电的利用意向,所述供电要求部在所述乘员没有所述利用意向的情况下,停止所述非接触供电的要求。
12.(2)根据上述(1)所述的供电控制装置,所述意向确认部在向所述乘员确认所述利用意向时,将与所述车辆的蓄电池的充电状态相关的信息向该乘员通知。
13.(3)根据上述(2)所述的供电控制装置,所述意向确认部在向所述乘员确认所述利用意向时,将所述蓄电池的当前的soc向该乘员通知。
14.(4)根据上述(2)或(3)所述的供电控制装置,所述意向确认部在向所述乘员确认所述利用意向时,将距规定的充电设施的距离和到所述车辆到达该规定的充电设施为止消耗的预测电力消耗量的至少一方向该乘员通知。
15.(5)一种供电装置,构成为以非接触的方式对车辆供电,其中,具备控制从该供电装置向所述车辆的非接触供电的控制部,所述控制部在接收到表示所述车辆的乘员没有所述非接触供电的利用意向时,停止该非接触供电。
16.(6)一种输入输出装置,设置于构成为由供电装置以非接触的方式供电的车辆,其
中,输出用于向所述车辆的乘员确认从所述供电装置向该车辆的非接触供电的利用意向的画面及语音的至少一方。
17.发明效果
18.根据本发明,能够抑制违背车辆的乘员的意向而进行从供电装置向车辆的非接触供电。
附图说明
19.图1是概略性地示出本发明的第一实施方式的非接触供电系统的结构的图。
20.图2是供电装置的控制器的概略性的结构图。
21.图3是示出车辆的ecu的概略性的结构及其他的车载设备的图。
22.图4是ecu的处理器的功能框图。
23.图5是示出本发明的第一实施方式中的供电要求处理的控制例程的流程图。
24.图6是示出用于向车辆的乘员确认非接触供电的利用意向的画面的一例的图。
25.图7是示出本发明的第一实施方式中的供电处理的控制例程的流程图。
26.图8是示出用于向车辆的乘员确认非接触供电的利用意向的画面的一例的图。
27.图9是示出本发明的第三实施方式中的供电停止处理的控制例程的流程图。
28.图10是示出本发明的第三实施方式中的供电处理的控制例程的流程图。
29.附图标记说明
30.1 非接触供电系统
31.2 供电装置
32.3 车辆
33.6 控制器
34.62 处理器
35.7 电子控制单元
36.73 处理器
37.74 供电要求部
38.75 意向确认部
39.37 输入输出装置
具体实施方式
40.以下,参照附图来对本发明的实施方式进行详细说明。需要说明的是,在以下的说明中,对同样的构成要素标注同一附图标记。
41.《第一实施方式》
42.以下,参照图1~图7来对本发明的第一实施方式进行说明。
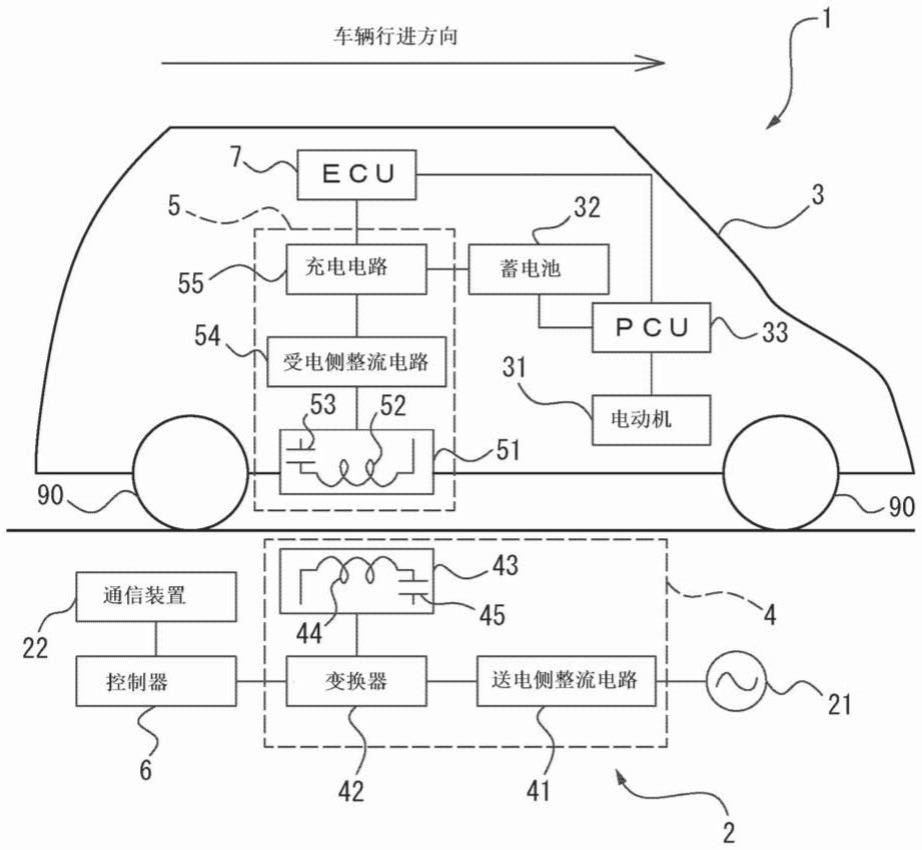
43.图1是概略性地示出本发明的第一实施方式的非接触供电系统1的结构的图。非接触供电系统1具备设置于地面的供电装置2和车辆3,进行供电装置2与车辆3之间的非接触供电。尤其是,在本实施方式中,非接触供电系统1在车辆3正在行驶时,通过磁场谐振耦合(磁场共振)来进行从供电装置2向车辆3的非接触供电。即,非接触供电系统1以磁场为介质来从供电装置2向车辆3传送电力。需要说明的是,非接触供电也被称作非接触电力传送、无
线电力传送或无线供电。
44.供电装置2构成为以非接触的方式对车辆3供电,车辆3构成为由供电装置2以非接触的方式供电。具体而言,供电装置2具备构成为以非接触的方式发送电力的送电装置4,车辆3具备构成为以非接触的方式从送电装置4接收电力的受电装置5。
45.如图1所示,供电装置2除了送电装置4之外,还具备电源21、控制器6及通信装置22。在本实施方式中,供电装置2设置于车辆3通过的道路(车道),例如埋入于地中(路面之下)。需要说明的是,供电装置2的至少一部分(例如,电源21、控制器6及通信装置22)也可以配置于路面之上。
46.电源21是送电装置4的电力源,向送电装置4供给电力。电源21例如是供给单相交流电力的商用交流电源。需要说明的是,电源21也可以是供给三相交流电力的交流电源等。
47.送电装置4具备送电侧整流电路41、变换器42及送电侧谐振电路43。在送电装置4中,经由送电侧整流电路41及变换器42而向送电侧谐振电路43供给合适的交流电力(高频电力)。
48.送电侧整流电路41与电源21及变换器42电连接。送电侧整流电路41将从电源21供给的交流电力整流而变换为直流电力,将直流电力向变换器42供给。送电侧整流电路41例如是ac/dc转换器。
49.变换器42与送电侧整流电路41及送电侧谐振电路43电连接。变换器42将从送电侧整流电路41供给的直流电力变换为比电源21的交流电力高的频率的交流电力(高频电力),将高频电力向送电侧谐振电路43供给。
50.送电侧谐振电路43具有由线圈44及电容器45构成的谐振器。线圈44及电容器45的各种参数(线圈44的外径及内径、线圈44的匝数、电容器45的静电容等)以使送电侧谐振电路43的谐振频率成为规定的设定值的方式确定。规定的设定值例如是10khz~100ghz,优选是作为车辆的非接触供电用的频带而由sae tir j2954标准确定的85khz。
51.送电侧谐振电路43以使线圈44的中心位于车道的中央的方式配置于车辆3通过的车道的中央。若从变换器42供给的高频电力向送电侧谐振电路43施加,则送电侧谐振电路43产生用于发送电力的交流磁场。需要说明的是,电源21也可以是燃料电池或太阳能电池这样的直流电源,在该情况下,也可以省略送电侧整流电路41。
52.控制器6例如是通用计算机,进行供电装置2的各种控制。例如,控制器6与送电装置4的变换器42电连接,为了控制送电装置4的电力发送而控制变换器42。
53.图2是控制器6的概略性的结构图。控制器6具备存储器61及处理器62。存储器61及处理器62经由信号线而互相连接。需要说明的是,控制器6也可以还具备用于将控制器6与互联网这样的通信网络连接的通信接口等。
54.存储器61例如具有易失性的半导体存储器(例如ram)及非易失性的半导体存储器(例如rom)。存储器61存储在处理器62中执行的程序、在由处理器62执行各种处理时使用的各种数据等。
55.处理器62具有一个或多个cpu(central processing unit:中央处理单元)及其周边电路,执行各种处理。需要说明的是,处理器62也可以还具有逻辑运算单元或数值运算单元这样的运算电路。处理器62是供电装置2的控制部的一例。
56.通信装置22是能够实现供电装置2与供电装置2的外部的通信的设备(例如近距离
无线通信模块)。通信装置22与控制器6电连接,控制器6经由通信装置22而与车辆3通信。
57.另一方面,如图1所示,车辆3除了受电装置5之外,还具备电动机31、蓄电池32、功率控制单元(pcu:power control unit)33及电子控制单元(ecu:electronic control unit)7。在本实施方式中,车辆3是未搭载内燃机的电动汽车(ev),电动机31输出行驶用的动力。
58.电动机31例如是交流同步电动机,作为电动机及发电机发挥功能。电动机31在作为电动机发挥功能时,以蓄积于蓄电池32的电力为动力源而被驱动。电动机31的输出经由减速机及车轴而向车轮90传递。另一方面,在车辆3的减速时,通过车轮90的旋转而驱动电动机31,电动机31作为发电机发挥功能而发电产生再生电力。
59.蓄电池32是能够充电的二次电池,例如由锂离子电池、镍氢电池等构成。蓄电池32蓄积车辆3的行驶所需的电力(例如电动机31的驱动电力)。若由电动机31发电产生的再生电力向蓄电池32供给,则蓄电池32被充电,蓄电池32的充电率(soc:state of charge)恢复。另外,蓄电池32也能够经由设置于车辆3的充电口而由供电装置2以外的外部电源充电。
60.pcu33与蓄电池32及电动机31电连接。pcu33具有变换器、升压转换器及dc/dc转换器。变换器将从蓄电池32供给的直流电力变换为交流电力,将交流电力向电动机31供给。另一方面,变换器将由电动机31发电产生的交流电力(再生电力)变换为直流电力,将直流电力向蓄电池32供给。升压转换器在蓄积于蓄电池32的电力向电动机31供给时,根据需要而将蓄电池32的电压升压。dc/dc转换器在蓄积于蓄电池32的电力向前照灯等电子设备供给时,将蓄电池32的电压降压。
61.受电装置5具备受电侧谐振电路51、受电侧整流电路54及充电电路55。受电装置5从送电装置4接收电力,将接收到的电力向蓄电池32供给。
62.受电侧谐振电路51以使与路面的距离小的方式配置于车辆3的底部。在本实施方式中,受电侧谐振电路51在车宽方向上配置于车辆3的中央,在车辆3的前后方向上配置于前轮90与后轮90之间。
63.受电侧谐振电路51具有与送电侧谐振电路43同样的结构,具有由线圈52及电容器53构成的谐振器。线圈52及电容器53的各种参数(线圈52的外径及内径、线圈52的匝数、电容器53的静电容等)以使受电侧谐振电路51的谐振频率与送电侧谐振电路43的谐振频率一致的方式确定。需要说明的是,只要受电侧谐振电路51的谐振频率与送电侧谐振电路43的谐振频率的偏差量小,例如,只要受电侧谐振电路51的谐振频率为送电侧谐振电路43的谐振频率的
±
20%的范围内,则受电侧谐振电路51的谐振频率未必需要与送电侧谐振电路43的谐振频率一致。
64.在如图1所示那样受电侧谐振电路51与送电侧谐振电路43对向时,若在送电侧谐振电路43产生交流磁场,则交流磁场的振动向以与送电侧谐振电路43相同的谐振频率共振的受电侧谐振电路51传递。其结果,通过电磁感应而在受电侧谐振电路51流动感应电流,通过感应电流而在受电侧谐振电路51中产生电力。即,送电侧谐振电路43经由磁场而向受电侧谐振电路51发送电力,受电侧谐振电路51经由磁场而从送电侧谐振电路43接收电力。
65.受电侧整流电路54与受电侧谐振电路51及充电电路55电连接。受电侧整流电路54将从受电侧谐振电路51供给的交流电力整流而变换为直流电力,将直流电力向充电电路55供给。受电侧整流电路54例如是ac/dc转换器。
66.充电电路55与受电侧整流电路54及蓄电池32电连接。充电电路55将从受电侧整流电路54供给的直流电力变换为蓄电池32的电压电平并向蓄电池32供给。若从送电装置4发送出的电力由受电装置5向蓄电池32供给,则蓄电池32被充电,蓄电池32的soc恢复。充电电路55例如是dc/dc转换器。
67.ecu7进行车辆3的各种控制。例如,ecu7与受电装置5的充电电路55电连接,为了控制从送电装置4发送出的电力对蓄电池32的充电而控制充电电路55。另外,ecu7与pcu33电连接,为了控制蓄电池32与车载设备(例如电动机31)之间的电力的授受而控制pcu33。
68.图3是示出ecu7的概略性的结构及其他的车载设备的图。ecu7具有通信接口71、存储器72及处理器73。通信接口71、存储器72及处理器73经由信号线而互相连接。
69.通信接口71具有用于将ecu7与遵循了can(controller area network:控制器局域网)等标准的车内网络连接的接口电路。
70.存储器72例如具有易失性的半导体存储器(例如ram)及非易失性的半导体存储器(例如rom)。存储器72存储在处理器73中执行的程序、在由处理器73执行各种处理时使用的各种数据等。
71.处理器73具有一个或多个cpu(central processing unit:中央处理单元)及其周边电路,执行各种处理。需要说明的是,处理器73也可以还具有逻辑运算单元或数值运算单元这样的运算电路。
72.另外,如图3所示,车辆3还具备gnss接收机34、地图数据库35、导航装置36、输入输出装置37及通信装置38。gnss接收机34、地图数据库35、导航装置36、输入输出装置37及通信装置38与ecu7电连接。
73.gnss接收机34基于从多个(例如3个以上)测位卫星得到的测位信息来检测车辆3的当前位置(例如车辆3的纬度及经度)。具体而言,gnss接收机34捕捉多个测位卫星,接收从测位卫星发送出的电波。并且,gnss接收机34基于电波的发送时刻与接收时刻的差来算出距测位卫星的距离,基于距测位卫星的距离及测位卫星的位置(轨道信息)来检测车辆3的当前位置。gnss接收机34的输出即由gnss接收机34检测到的车辆3的当前位置向ecu7发送。
74.需要说明的是,gnss(global navigation satellite system:全球测位卫星系统)是美国的gps、俄罗斯的glonass、欧洲的galileo、日本的qzss、中国的北斗(beidou)、印度的irnss等卫星测位系统的统称。因此,在gnss接收机34中包括gps接收机。
75.地图数据库35存储有地图信息。在地图信息中包括供电装置2的位置信息等。ecu7从地图数据库35取得地图信息。需要说明的是,也可以是,地图数据库35设置于车辆3的外部(例如服务器等),ecu7从车辆3的外部取得地图信息。
76.导航装置36基于由gnss接收机34检测到的车辆3的当前位置、地图数据库35的地图信息、驾驶员的输入等来设定直到目的地为止的车辆3的行驶路线。由导航装置36设定的行驶路线向ecu7发送。需要说明的是,gnss接收机34及地图数据库35也可以向导航装置36并入。
77.输入输出装置37在车辆3与车辆3的乘员(例如驾驶员)之间进行信息的输入输出。输入输出装置37例如包括显示信息的显示器、产生声音的扬声器、用于供车辆3的乘员进行输入操作的操作按钮或操作开关、接收车辆3的乘员的语音的传声器等。输入输出装置37例
如是由触摸屏幕、平视显示器、数字仪表盘等的至少1个构成的人机接口(human machine interface(hmi))。ecu7的输出经由输入输出装置37而向车辆3的乘员传递,来自车辆3的乘员的输入经由输入输出装置37而向ecu40发送。需要说明的是,也可以是导航装置36作为输入输出装置37发挥功能。
78.通信装置38是能够实现车辆3与车辆3的外部的通信的设备(例如,近距离无线通信模块、用于将车辆3与互联网这样的通信网络连接的数据通信模块(dcm:data communication module)等)。ecu7经由通信装置38而与供电装置2通信。
79.如上所述,在非接触供电系统1中,经由在供电装置2中产生的交流磁场而进行车辆3的非接触供电。然而,为了非接触供电而在供电装置2中始终产生交流磁场会带来电力的浪费。另外,也担心交流磁场对电子设备等的影响。
80.因而,供电装置2的控制器6在从车辆3接收到非接触供电的要求时利用送电装置4来产生交流磁场。由此,能够在车辆3通过供电装置2的上方的合适的定时下产生交流磁场。
81.例如,车辆3的ecu7在车辆3接近了设置有供电装置2的供电区域时,向供电装置2要求非接触供电。然而,在车辆3通过供电装置2的上方时,车辆3的乘员(例如驾驶员)未必始终希望基于非接触供电的蓄电池32的充电。例如,在蓄电池32的蓄电量充分的情况或计划着外部电源或再生电力对蓄电池32的充电的情况下,从供电装置2向车辆3供给电力的必要性低。尤其是,在对于向车辆3的非接触供电收取利用费用的情况下,希望尽可能地避免无用的供电。
82.因而,在本实施方式中,向车辆3的乘员确认非接触供电的利用意向,基于利用意向的确认结果来判断非接触供电的实施的有无。该控制由车辆3的ecu7进行。ecu7是设置于车辆3的供电控制装置的一例。
83.图4是ecu7的处理器73的功能框图。在本实施方式中,处理器73具备供电要求部74及意向确认部75。供电要求部74及意向确认部75是通过ecu7的处理器73执行存储于ecu7的存储器72的计算机程序而实现的功能模块。需要说明的是,供电要求部74及意向确认部75也可以由设置于处理器73的专用的运算电路实现。
84.供电要求部74要求从供电装置2向车辆3的非接触供电。例如,供电要求部74通过将表示车辆3接近了供电装置2的接近信号向供电装置2发送来要求非接触供电。
85.意向确认部75向车辆3的乘员确认从供电装置2向车辆3的非接触供电的利用意向。并且,供电要求部74在车辆3的乘员没有非接触供电的利用意向的情况下,停止从供电装置2向车辆3的非接触供电的要求。由此,能够抑制违背车辆3的乘员的意向而进行从供电装置2向车辆3的非接触供电。
86.以下,参照图5的流程图来对上述的控制的流程进行说明。图5是示出本发明的第一实施方式中的供电要求处理的控制例程的流程图。本控制例程由ecu7的处理器73反复执行。
87.首先,在步骤s101中,意向确认部75判定在车辆3的前方是否设置有供电装置2。即,意向确认部75判定在车辆3的前方是否存在供电区域。例如,在车辆3的行驶车道中在车辆3的前方设置有供电装置2的情况下,意向确认部75判定为在车辆3的前方设置有供电装置2。另外,在由导航装置36设定有车辆3的行驶路线的情况下,意向确认部75也可以在设置于车辆3的行驶路线上的供电装置2与车辆3之间的距离成为了规定值以下时,判定为在车
辆3的前方设置有供电装置2。供电装置2与车辆3之间的距离例如通过将存储于地图数据库35的供电装置2的位置与由gnss接收机34检测到的车辆3的当前位置进行对照来算出。
88.在步骤s101中判定为在车辆3的前方未设置供电装置2的情况下,本控制例程结束。另一方面,在步骤s101中判定为在车辆3的前方设置有供电装置2的情况下,本控制例程进入步骤s102。
89.在步骤s102中,意向确认部75向车辆3的乘员确认从供电装置2向车辆3的非接触供电的利用意向。例如,意向确认部75经由输入输出装置37而向车辆3的乘员确认非接触供电的利用意向。作为具体例,意向确认部75使输入输出装置37输出用于向车辆3的乘员确认非接触供电的利用意向的画面。
90.图6是示出用于向车辆3的乘员确认非接触供电的利用意向的画面的一例的图。在图6的例子中,车辆3的乘员通过操作输入输出装置37的触摸屏幕来选择非接触供电的利用意向的有无,其选择结果向ecu7发送。
91.需要说明的是,意向确认部75也可以使输入输出装置37输出用于向车辆3的乘员确认非接触供电的利用意向的语音。在该情况下,车辆3的乘员将非接触供电的利用意向的有无通过语音而向输入输出装置37输入。另外,意向确认部75也可以使输入输出装置37输出用于向车辆3的乘员确认非接触供电的利用意向的画面及语音。即,输入输出装置37输出用于向车辆3的乘员确认非接触供电的利用意向的画面及语音的至少一方。
92.另外,意向确认部75也可以经由车辆3的乘员的移动终端而向车辆3的乘员确认非接触供电的利用意向。在该情况下,车辆3的乘员的移动终端和ecu7通过有线或无线而连接,意向确认部75使移动终端输出用于向车辆3的乘员确认非接触供电的利用意向的画面及语音的至少一方。
93.接着,在步骤s103中,供电要求部74判定车辆3的乘员是否有非接触供电的利用意向。在判定为没有非接触供电的利用意向的情况下,本控制例程结束。即,供电要求部74在车辆3通过供电装置2的上方时,不向供电装置2要求非接触供电。其结果,在供电装置2的送电装置4中不产生交流磁场,也不产生非接触供电的利用费用。
94.另一方面,在步骤s103中判定为有非接触供电的利用意向的情况下,本控制例程进入步骤s104。在步骤s104中,供电要求部74向供电装置2要求非接触供电。例如,供电要求部74通过经由车辆3的通信装置38将接近信号向供电装置2发送来要求非接触供电。需要说明的是,供电要求部74也可以通过在车辆3中产生交流磁场等来要求非接触供电。在步骤s104之后,本控制例程结束。
95.另一方面,在供电装置2中,进行以下的控制。图7是示出本发明的第一实施方式中的供电处理的控制例程的流程图。本控制例程由控制器6的处理器62反复执行。
96.首先,在步骤s201中,处理器62判定是否有来自车辆3的非接触供电的要求。在判定为没有非接触供电的要求的情况下,本控制例程结束。另一方面,在判定为有非接触供电的要求的情况下,本控制例程进入步骤s202。
97.在步骤s202中,处理器62从供电装置2向车辆3传送电力。具体而言,处理器62控制送电装置4的变换器42而将高频电力向送电侧谐振电路43供给。其结果,在送电侧谐振电路43中产生交流磁场,经由交流磁场而从送电侧谐振电路43向受电侧谐振电路51发送电力。在步骤s202之后,本控制例程结束。
98.《第二实施方式》
99.第二实施方式的非接触供电系统的结构及控制除了以下说明的点之外,基本上与第一实施方式的非接触供电系统的结构及控制是同样的。因而,以下,关于本发明的第二实施方式,以与第一实施方式不同的部分为中心进行说明。
100.从供电装置2向车辆3的非接触供电的需要与否根据蓄积于车辆3的蓄电池32的电力的余量、蓄电池32的充电计划等而变化。因而,在第二实施方式中,意向确认部75在向车辆3的乘员确认非接触供电的利用意向时,将与车辆3的蓄电池32的充电状态相关的信息向车辆3的乘员通知。由此,车辆3的乘员能够关于非接触供电的实施的有无进行更合适的判断。
101.例如,意向确认部75在向车辆3的乘员确认非接触供电的利用意向时,作为与蓄电池32的当前的充电状态相关的信息而将蓄电池32的当前的soc向车辆3的乘员通知。在该情况下,若蓄电池32的当前的soc对于车辆3的行驶计划是充分的值,则车辆3的乘员能够通过拒绝车辆3的非接触供电来阻止产生非接触供电的利用费用。
102.另外,意向确认部75在向车辆3的乘员确认非接触供电的利用意向时,也可以作为与蓄电池32的将来的充电状态相关的信息而将距规定的充电设施(例如自己家)的距离和到车辆3到达规定的充电设施为止消耗的预测电力消耗量的至少一方向车辆3的乘员通知。规定的充电设施使用输入输出装置37等而由车辆3的乘员预先登记。在该情况下,若基于该信息而判断为不需要蓄电池32的充电,则车辆3的乘员能够通过拒绝车辆3的非接触供电来阻止产生非接触供电的利用费用。
103.在第二实施方式中,与第一实施方式同样,执行图5的供电要求处理的控制例程。此时,在步骤s102中,意向确认部75作为用于向车辆3的乘员确认非接触供电的利用意向的画面而使输入输出装置37输出如图8所示的画面。
104.图8是示出用于向车辆3的乘员确认非接触供电的利用意向的画面的一例的图。在图8的例子中,蓄电池32的当前的soc和从当前地到自己家(规定的充电设施)为止的距离显示于输入输出装置37。另外,蓄电池32的当前的soc以数值及条形图的形态显示。需要说明的是,输入输出装置37也可以将蓄电池32的当前的soc和从当前地到规定的充电设施为止的距离通过语音或画面及语音来输出。
105.《第三实施方式》
106.第三实施方式的非接触供电系统的结构及控制除了以下说明的点之外,基本上与第一实施方式的非接触供电系统的结构及控制是同样的。因而,以下,关于本发明的第三实施方式,以与第一实施方式不同的部分为中心进行说明。
107.在第三实施方式中,ecu7的供电要求部74在车辆3的乘员没有非接触供电的利用意向的情况下,将表示车辆3的乘员没有非接触供电的利用意向的信号(以下,称作“利用拒绝信号”)向供电装置2发送。并且,控制器6的处理器62在接收到利用拒绝信号时,停止从供电装置2向车辆3的非接触供电。
108.图9是示出本发明的第三实施方式中的供电停止处理的控制例程的流程图。本控制例程由ecu7的处理器73反复执行。
109.步骤s301~s303与图5的步骤s101~s103同样地执行。在步骤s303中判定为有非接触供电的利用意向的情况下,本控制例程结束。另一方面,在步骤s303中判定为没有非接
触供电的利用意向的情况下,本控制例程进入步骤s304。
110.在步骤s304中,供电要求部74经由车辆3的通信装置38而将利用拒绝信号向供电装置2发送。在步骤s304之后,本控制例程结束。
111.图10是示出本发明的第三实施方式中的供电处理的控制例程的流程图。本控制例程由控制器6的处理器62反复执行。
112.首先,在步骤s401中,处理器62判定是否检测到车辆3。例如,处理器62使用设置于供电装置2的金属探知机或光电传感器(例如扩散反射型)这样的检测器来检测车辆3。需要说明的是,也可以是,从车辆3始终发出微弱的磁场(稳恒磁场或交流磁场),处理器62通过检测该磁场来检测车辆3。另外,处理器62也可以通过使用了设置于供电装置2的相机的物体识别(例如基于机器学习的物体识别等)来检测车辆3。
113.在步骤s401中判定为未检测到车辆3的情况下,本控制例程结束。另一方面,在步骤s401中判定为检测到车辆3的情况下,本控制例程进入步骤s402。
114.在步骤s402中,处理器62判定是否从车辆3接收到利用拒绝信号。在判定为接收到利用拒绝信号的情况下,本控制例程结束。在该情况下,处理器62在车辆3通过供电装置2的上方时不进行从供电装置2向车辆3的非接触供电。
115.另一方面,在步骤s402中判定为未接收到利用拒绝信号的情况下,本控制例程进入步骤s403。在步骤s403中,与图7的步骤s202同样,处理器62从供电装置2向车辆3传送电力。在步骤s403之后,本控制例程结束。
116.《其他的实施方式》
117.以上,说明了本发明的优选的实施方式,但本发明不限定于这些实施方式,能够在权利要求书的记载内实施各种各样的修正及变更。
118.例如,车辆3也可以是具备内燃机及电动机作为行驶用的动力源的混合动力车辆(hv)或插电式混合动力车辆(phv)。另外,车辆3也可以是车辆3的加速、转向及减速(制动)的至少一部分被自动地控制的自动驾驶车辆。而且,车辆3也可以是公共汽车或卡车这样的商用车、无人运送车(agv:automated guided vehicle)等。
119.另外,作为从供电装置2向车辆3的非接触供电的手法,不限于包括磁场共振方式的电磁感应方式,能够使用以电场为介质来传送电力的电场耦合方式这样的各种各样的手法。
120.另外,上述的实施方式能够任意组合而实施。例如,在图9的供电停止处理的步骤s302中,也可以与第二实施方式同样,意向确认部75作为用于向车辆3的乘员确认非接触供电的利用意向的画面而使输入输出装置37输出如图8所示的画面。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1