一种智能网联混合动力车辆域控制系统及其控制方法
1.本发明属于汽车控制技术领域,具体涉及一种智能网联混合动力车辆域控制系统及其控制方法。
背景技术:
2.在能源危机和环境污染问题的加持下,新能源汽车的发展迫在眉睫。其中,智能网联混合动力汽车既不存在纯电动汽车的里程焦虑问题,又可以提高燃油效率、减少尾气排放。但由于包括发动机、多个电动机的引入,使系统的自由度增加,控制变得困难。为了充分发挥智能网联混合动力的优势,具有较大计算量的耦合控制算法被应用,因此控制器的性能需要提升。并且近些年车联网技术、辅助驾驶技术、地盘线控技术和车载娱乐系统日渐成熟,为了实现这些模块的安全有序运行,提出一种新的控制系统是必不可少的。以车联网技术为例,车联网技术可以获取云端数据,从而改善驾驶体验,但这同时也使车辆多了一个风险接口,一旦驱动系统被外界接管控制,那么驾驶员和乘客的生命安全将受到威胁。2015年7月,美国两个白帽黑客公开了自己的实验结果:在jeep自由光行驶时,他们侵入uconnect系统,远程启动了车上很多功能,包括让10英里之外的自由光加速踏板失灵、关闭发动机等。因此,新的控制系统需要具备高的计算能力,快速的信息传递能力,良好的安全保护能力和故障容错能力。
3.目前车辆通讯普遍采用can通讯技术。can通讯技术是德国bosch公司开发,由于成本低,可靠性强等优势在车通讯领域得到了广泛的应用。在can总线上可以将多个节点连接在一起构成整车的局部网络,进而实现各系统和控制模块之间的信息传递。
4.智能网联混合动力车辆是具有发动机和电动机的复杂系统,其中电动机一般基于高压电平台进行驱动,因此电磁干扰问题变得更加严峻。单通过一路或两路总线进行通讯,在某一设备被干扰后很可能导致整车系统通讯瘫痪。
技术实现要素:
5.鉴于现有技术存在的缺陷,本发明提供了一种智能网联混合动力车辆域控制系统及其控制方法。所提控制系统以“域”为单位将智能网联混合动力车辆控制系统按功能进行划分,然后通过网关将各域系统与中央处理器(cpu)建立通信。所提cpu具有各域系统的监测权和网关的管理权,可以根据整车系统需求对每个域系统进行监制和调度,保证各域系统之间的高效通讯,同时避免数据过度传递导致的性能衰减。所提各域系统可以独立运行,因此可以根据域系统的性能需求进行成本资源的合理分配,在满足智能网联混合动力车辆复杂的功能需求以及车辆无人化、智能化发展需求的同时降低成本。所提各域系统可以独立运行,避免了单一功能出现故障或受到干扰后引起整车的控制系统瘫痪,所述cpu具有对动力系统的基础控制能力,驾驶辅助系统、智能网联系统等出现故障后cpu可屏蔽故障系统维持车辆最基本的形式能力,提高了车辆运行安全性。
6.一种智能网联混合动力车辆域控制系统,包括:
7.中央控制器,负责监管调度;
8.子控制域,包括信息采集域、智能网联域、自动驾驶域、车身控制域、能量管理域、动力系统辅助控制域、驾驶辅助域、底盘控制域和动力系统控制域。
9.信息采集域、智能网联域、自动驾驶域通过网关1与中央控制器通讯连接;
10.车身控制域与中央控制器通讯连接;
11.能量管理域、动力系统辅助控制域通过网关2与中央控制器通讯连接;
12.驾驶辅助域、底盘控制域和动力系统控制域通过网关3与中央控制器通讯连接。
13.具体的:
14.所述中央处理器是域控制系统的决策中心,同时也是信息传递中枢;中央处理器通过网关对各控制域调取和发送数据,并且中央处理器实时监测各子控制域的健康状态,通过网关可对不健康的子控制域进行有效隔离;所中央处理器具有动力控制域的直接控制权,当自动驾驶控制域出现故障时,中央处理器启动人工驾驶模式,直接实现对动力系统控制域的控制;
15.所述信息采集域包括车辆内外的各类传感器,还包括信传感器息处理单元;所述信息采集域通过传感器获取数据,然后根据需求对数据进行处理,以供中央处理器的调取;
16.所述智能网联域是整体域控制系统与云端服务器的通信接口,实时获取云端数据,同时将车身必要数据发送至云端服务器;所述智能网联域具有数据处理能力,将云端数据进行相应处理以备中央处理器调取,将待上传数据进行处理以备发送至云端;
17.所述自动驾驶域是自动驾驶算法的主要实施平台,中央处理器接收到自动驾驶指令后控制网关1将环境信息和云端数据传递至自动驾驶域,自动驾驶域输出底盘控制域和动力系统控制域的控制指令,并通过网关1发送至中央处理器;中央处理器将控制指令通过网关2发送至底盘控制域和动力系统域,以实现自动驾驶功能;
18.所述车身控制域包括车身各部件的控制单元;中央处理器接收到驾驶员的控制指令后直接将控制指令发送至车身控制域,以实现对车身系统的控制;
19.所述能量管理域包括动力电池管理系统、dc-dc直流变压模块、电源模块,在系统运行过程中,对电源模块进行健康监测和控制;
20.所述动力系统辅助控制域,包括动力系统的润滑系统和冷却系统;中央处理器通过网关2控制动力系统辅助控制域,为动力系统提供健康的工作环境。
21.所述驾驶辅助域,包括电子稳定性系统、驱动防滑系统;驾驶辅助域启动后,中央处理器通过信息采集系统获取车身姿态信息,将此信息发送至辅助驾驶域,辅助驾驶域通过网关3将指令发送至底盘控制域,以实现响应的驾驶辅助功能。
22.所述底盘控制域,包括转向系统、制动系统和悬架系统,根据不同驾驶需求上执行主动转向、主动制动和主动悬架功能;
23.所述动力系统控制域,运行智能网联混合动力系统控制策略,以及模式切换和换挡执行机构的控制算法。
24.进一步的,所述的网关1负责驾驶指令域中央处理器的交互,为了保证获取指令的时效性,网关1应为高速网关;网关2负责能量管理域和动力系统辅助控制域与中央处理器的信息交互,网关2采用中速网关;网关3负责自动驾驶域、底盘控制域、动力系统控制域和中央处理器之间的信息交互,网关3为高速网关。
25.所述的一种智能网联混合动力车辆域控制系统的控制方法,所述智能网联混合动力车辆的域控制系统包括自动驾驶和人工驾驶两种驾驶模式;
26.在人工驾驶模式,信息采集域主要负责获取驾驶员指令、获取云端数据和车身姿态信息;这些指令和数据信息经过网关1被中央处理器读取,中央处理器将驾驶员指令和云端数据通过网关3转发至动力系统控制域;动力系统控制域中的综合控制器会根据在接收到指令和数据信息后计算输出电动机、发动机和执行机构的控制指令;中央处理器将车身姿态数据信息通过网关3转发至驾驶辅助控制域,驾驶辅助控制域将控制指令通过网关3发送至底盘控制域,以实现驾驶辅助功能;中央处理器启动并控制能量管理域和动力系统辅助控制域,能量管理域控制动力电池为执行层的底盘控制域和动力系统控制域提供电能;动力系统辅助控制域工作以保证动力系统的具有健康的工作条件;
27.在自动驾驶模式下,信息采集域负责获取环境信息、云端数据和车身姿态信息;其中环境信息和云端数据通过网关1被自动驾驶域调取,然后自动驾驶域通过网关1将计算生成的驾驶指令发送至中央处理器;云端数据和车身姿态信息通过网关1被中央处理器调取;中央处理器将自动驾驶域生成的指令和云端数据通过网关3发送至动力系统控制域;动力系统控制域中的综合控制器会根据在接收到指令和数据信息后计算输出电动机、发动机和执行机构的控制指令;中央处理器将车身姿态数据信息通过网关3转发至驾驶辅助控制域,驾驶辅助控制域将控制指令通过网关3发送至底盘控制域,以实现驾驶辅助功能;中央处理器启动并控制能量管理域和动力系统辅助控制域,能量管理域控制动力电池为执行层的底盘控制域和动力系统控制域提供电能;动力系统辅助控制域工作以保证动力系统的具有健康的工作条件。
28.还包括,智能网联混合动力车辆的域控制系统启动后实时进行智能网联域的安全检测;若智能网联域安全,则中央处理器开启网关1处智能网联域的通信通道,并对云端数据进行实时转发;若智能网联域不安全,则中央处理器关闭网关1处智能网联域的通信通道,并停止云端数据的转发,同时中央处理器控制其他采用云端数据的域停止相应功能。
29.本发明技术方案带来的有益效果:
30.1、本发明技术方案将智能网联混合动力车辆控制系统以“域”为单位进行划分,每个域可独立运行此方案可根据各域的功能需求配置硬件资源,高效处理所需功能的同时减少成本。
31.2、本发明技术方案通过中央处理器(cpu)与网关的组合实现对各域的控制和信息调度。极度减小了各域之间的相互影响,避免了一个功能出现异常而导致整车瘫痪的情况,有效增强系统的鲁棒性。
32.3、本发明技术方案设置了单独的只能网联域,可有效处理复杂的云端数据,同时减少车辆联网后核心系统被入侵的风险。
33.4、本发明所提智能网联混合动力车辆域控制系统是一种可拓展系统,根据需求可调整中央处理器配置和增加拓展域。
附图说明
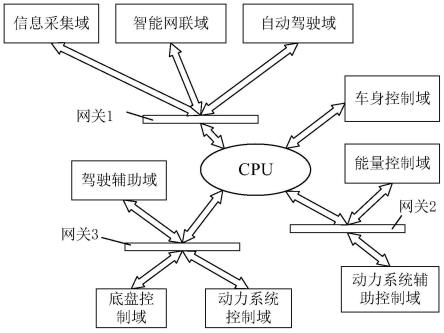
34.图1为本发明的智能网联混合动力车辆的域控制系统架构图;
35.图2为本发明的智能网联混合动力车辆域控制系统的细节图;
36.图3为本发明的人工驾驶实施方案;
37.图4为本发明的自动驾驶控制方案;
38.图5为本发明的智能网联域工作逻辑框图。
具体实施方式
39.本发明提供了一种智能网联混合动力车辆域控制系统,具体的是一种基于中央处理器(cpu)的“一监多管”控制系统,即一个中央控制器负责监管调度,多个子控制器单独管理自己的域系统。
40.所述智能网联混合动力车辆域控制系统包括中央控制器(cpu)、三个网关和多个子控制域。子控制域包括信息采集域、智能网联域、、自动驾驶域、车身控制域、能量管理域、动力系统辅助控制域、驾驶辅助域、底盘控制域和动力系统控制域。域控制系统架构如图1所示。
41.参照图1,所述智能网联混合动力系统域控制系统以网关为界限可以分为三层。所述信息采集域、智能网联域、自动驾驶域与网关1共同组成感知决策层。所述车身控制域、能量管理域、动力系统辅助控制域与网关2共同组成附件层。所述驾驶辅助域、底盘控制域和动力系统控制域与网关3共同组成行动层。
42.所述中央处理器为系统的信息交互中枢,同时对三个网关和子控制域具有控制和信息调度权。
43.车身控制域与中央处理器直接连接。
44.图2为所述智能网联混合动力车辆域控制系统的细节图。
45.具体的,所述中央处理器是域控制系统的决策中心,同时也是信息传递中枢。在系统工作过程中,中央处理器可以通过网关对各控制域调取和发送数据。并且中央处理器实时监测各子控制域的健康状态,通过网关可对不健康的子控制域进行有效隔离。所述中央处理器具有动力控制域的直接控制权,当自动驾驶控制域出现故障时,中央处理器启动人工驾驶模式,直接实现对动力系统控制域的控制,保证车辆继续行驶的能力。
46.所述信息采集域包括车辆内外的各类传感器,如车内的方向盘、油门踏板等,车外的摄像头、激光雷达等,还包括信传感器息处理单元。所述信息采集域通过传感器获取数据,然后根据需求对数据进行分类、融合、压缩等处理,以供中央处理器的调取。所述信息采集域是独立系统,减小了数据处理过程对整体控制系统带来的负担,增强了控制系统的可靠性。
47.所述智能网联域是整体域控制系统与云端服务器的通信接口。在系统运行过程中实时获取云端数据,同时将车身必要数据发送至云端服务器。所述智能网联域具有数据处理能力,可将云端数据进行相应处理以备中央处理器调取,可将待上传数据进行处理以备发送至云端。
48.所述自动驾驶域是自动驾驶算法的主要实施平台,与信息采集系统和智能网联系统公用网关1。中央处理器接收到自动驾驶指令后控制网关1将环境信息和云端数据传递至自动驾驶域,自动驾驶域输出底盘控制域和动力系统控制域的控制指令,并通过网关1发送至中央处理器。中央处理器将控制指令通过网关2发送至底盘控制域和动力系统域,以实现自动驾驶功能。
49.所述车身控制域包括车窗、天窗、后视镜和车门等控制单元。由于车身控制域控制逻辑简单,不存在大量的数据交互,不会威胁中央处理器的安全,因此直接与中央处理器连接。中央处理器接收到驾驶员的控制指令后直接将控制指令发送至车身控制域,以实现对车身系统的控制。
50.所述能量管理域包括动力电池管理系统(bms)、dc-dc直流变压模块等电源模块。在系统运行过程中,可对电源模块进行健康监测和控制。例如动力电池的电压、电流、温度监测,充、放电的控制等。保证系统安全的同时提高用电效率。
51.所述动力系统辅助控制域包括动力系统的润滑系统和冷却系统等,例如润滑油泵和散热风扇等。中央处理器通过网关2控制动力系统辅助控制域,为动力系统提供健康的工作环境。
52.所述驾驶辅助域是指电子稳定性系统(esp),驱动防滑系统(tcs)等功能。驾驶辅助域启动后,中央处理器通过信息采集系统获取车身姿态信息,将此信息发送至辅助驾驶域,辅助驾驶域通过网关3将指令发送至底盘控制域,以实现响应的驾驶辅助功能。
53.所述底盘控制域包括转向系统、制动系统和悬架系统等,可根据不同驾驶需求上执行主动转向、主动制动和主动悬架功能,是实现驾驶辅助功能和自动驾驶功能的重要保障。
54.所述动力系统控制域包括综合控制器、发动机、电动机等驱动单元,以及离合器、换挡器等模式、挡位切换等执行控制单元,是车辆行驶的基础。综合控制器运行智能网联混合动力系统控制策略,例如发动机和电动机的动力分配算法,以及模式切换和换挡执行机构的控制算法。
55.域控制系统包含三个网关,其中网关1负责驾驶指令域中央处理器的交互,为了保证获取指令的时效性,网关1应为高速网关。网关2负责能量管理域和动力系统辅助控制域与中央处理器的信息交互,不会影响整车控制的时效性和安全性,因此网关2可采用中速网关。网关3负责自动驾驶域、底盘控制域、动力系统控制域和中央处理器之间的信息交互,是执行驾驶指令,完成规定动作的基础,因此网关3应为高速网关。
56.所述智能网联混合动力车辆的域控制系统可以实现自动驾驶和人工驾驶两种驾驶模式。
57.图3为人工驾驶控制方案,在人工驾驶模式,信息采集域主要负责获取驾驶员指令、获取云端数据和车身姿态信息。这些指令和数据信息经过网关1被中央处理器读取,中央处理器将驾驶员指令和云端数据通过网关3转发至动力系统控制域。参照图2,动力系统控制域中的综合控制器会根据在接收到指令和数据信息后计算输出电动机、发动机和执行机构的控制指令。中央处理器将车身姿态数据信息通过网关3转发至驾驶辅助控制域,驾驶辅助控制域将控制指令通过网关3发送至底盘控制域,以实现驾驶辅助功能。中央处理器启动并控制能量管理域和动力系统辅助控制域,能量管理域控制动力电池为执行层的底盘控制域和动力系统控制域提供电能;动力系统辅助控制域工作以保证动力系统的具有健康的工作条件。
58.图4为自动驾驶控制方案,在自动驾驶模式下,信息采集域负责获取环境信息、云端数据和车身姿态信息。其中环境信息和云端数据通过网关1被自动驾驶域调取,然后自动驾驶域通过网关1将计算生成的驾驶指令发送至中央处理器。云端数据和车身姿态信息通
过网关1被中央处理器调取。中央处理器将自动驾驶域生成的指令和云端数据通过网关3发送至动力系统控制域。参照图2,动力系统控制域中的综合控制器会根据在接收到指令和数据信息后计算输出电动机、发动机和执行机构的控制指令。中央处理器将车身姿态数据信息通过网关3转发至驾驶辅助控制域,驾驶辅助控制域将控制指令通过网关3发送至底盘控制域,以实现驾驶辅助功能。中央处理器启动并控制能量管理域和动力系统辅助控制域,能量管理域控制动力电池为执行层的底盘控制域和动力系统控制域提供电能;动力系统辅助控制域工作以保证动力系统的具有健康的工作条件。
59.图5为智能网联域工作逻辑框图。
60.参照图5,系统启动后实时进行智能网联域的安全检测。若智能网联域安全,则中央处理器开启网关1处智能网联域的通信通道,并对云端数据进行实时转发。若智能网联域不安全,则中央处理器关闭网关1处智能网联域的通信通道,并停止云端数据的转发,同时中央处理器控制其他采用云端数据的域停止相应功能。因此,当智能网联域收到外部入侵后,可有效被隔离,减少对中央处理器和其他控制域的伤害。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1