一种基于学习的汽车急加速跑偏补偿方法与流程
1.本发明涉及汽车设计技术领域,具体地说是一种基于学习的汽车急加速跑偏补偿方法。
背景技术:
2.当大扭力的前驱车辆在急加速时,发动机输出扭矩突然上升,由于车辆左右驱动半轴的不对称设计,传递到左右两侧车轮上的力矩不同,使得行驶方向被拉向一侧,表现为车辆加速跑偏的现象。
技术实现要素:
3.本发明为克服现有技术的不足,提供一种基于学习的汽车急加速跑偏补偿方法,该方法具备学习模块、验证模块及计算模块等三大模块,提供驾驶稳定性和安全性。
4.为实现上述目的,设计一种基于学习的汽车急加速跑偏补偿方法,其特征在于:所述的跑偏补偿方法包括学习模块、验证模块、计算模块;学习模块:判断是否符合跑偏补偿学习条件,若满足学习条件,则识别学习工况并计算自适应值;验证模块:根据 tbt 的平均值来判断学习得到的自适应值是否有效,并验证学习工况,tbt为方向盘扭矩;计算模块:根据自适应值和车辆加速度计算产生扭力转向时所需电机力矩,并根据车速和转向角度进行修正。
5.所述的学习条件的选择,当以下条件全部符合时,满足自学习工况,条件1,车辆纵向加速度a
lgt
超过自学习工况纵向加速度的最小值时, 此条件表明汽车正处于加速工况;条件2,车速超过自学习工况最小车速;条件3,横向加速度小于自学习工况最大横向加速度、横摆速度小于自学习工况最大横摆角速度,方向盘角度小于自学习工况最大转向盘角度;这些条件表明驾驶员通过施加 方向盘扭矩tbt 成功抑制了扭力转向,车辆处于稳定状态;条件4,所有输入 can 信号值均有效,其中can信号包括车速信号,驱动轴力矩信号,纵向加速度信号,横摆角速度信号和横向加速度信号。
6.所述的条件1中自学习工况纵向加速度的最小值为1m/s
²
。
7.所述的条件2中自学习工况最小车速为2km/h。
8.所述的条件3中自学习工况最大横向加速度为0.5m/s
²
;自学习工况最大横摆角速度为1.0
°
/s;自学习工况最大转向盘角度为2
°
。
9.所述的学习过程自适应值计算的流程如下:步骤1,初始化上电阶段,自适应值v
adp
使用上次存储在rom中的自适应值;步骤2,若满足自学工况后,开始自学习;
步骤3,计算标准化输入值,计算公式为v
nml_input = a
lgt * x
ninputvalue
或者v
nml_input = m
ds_trq * x
ninputvalue,
其中v
nml_input
为标准化输入值,a
lgt
为车辆纵向加速度,m
ds_trq
为驱动轴力矩,x
ninputvalue
为将纵向加速度或驱动轴扭矩转化为标准化输入的折算系数;步骤4,计算初始学习值,基于标准化输入值查表得到初始学习值v
ini
,其中查找表为一维查找表,输入为标准化输入,输出为得到的初始学习值;步骤5,自学习过程计算自适应值,计算公式为v
adp = {sum of
ꢀꢀvini
} / t
learn
,其中t
learn
为求平均v
adp
的的去抖滤波时间,sum of (v
init
表示在t
lern
时间段内 v
ini
的累加值;步骤6,当不满足自学工况后,不进行学习,自适应值使用上次计算的自适应学习值。
10.所述的验证学习工况的流程如下:步骤1,满足自学工况后,开始进行验证;步骤2,验证过程计算平均方向盘扭矩tbt
avg
,计算公式为tbt
avg = (sum of tbt / t
valid
) ,其中tbt
avg 为平均方向盘扭矩,sum of tbt为的t
valid
时间内方向盘扭矩累加和,t
valid
为求平均tbt
avg
的去抖滤波时间;步骤3,如果平均方向盘扭矩tbt
avg
超过用于验证自学习结果的最大方向盘力矩,则清零 v
adp
,在下一个周期重新进入学习模块进行自学习;否则,认为请求的电机力矩刚好抵消扭力转向,自学习的值有效;步骤4,当不满足自学工况后,不进行验证,自适应值使用上次得到的自适应学习值;步骤5,将得到的自适应学习值v
adp
存储在rom中。
11.所述的步骤3中最大方向盘力矩为2n。
12.计算及补偿的电机力矩的流程如下:步骤1,当车辆标准化输入超过进行力矩补偿的最小纵向加速度时,根据学习结果计算输出电机力矩;步骤2,计算车速修正系数,根据车速查表得到考虑实际车速计算补偿电机力矩的修正系数 xv,其中查找表为一维查找表,输入为车速v,输出为得到的车速修正系数;步骤3,计算转向角度修正系数,根据转向角度查表得到为考虑实际方向盘转角计算补偿电机力矩的修正系数xw,其中查找表为一维查找表,输入为转向角度w,输出为得到的转向角度修正系数;步骤4,计算补偿的电机力矩mmot,计算公式为mmot = x
v * x
w * v
adp
,其中xv为考虑实际车速计算补偿电机力矩的修正系数,xw为考虑实际方向盘转角计算补偿电机力矩的修正系数,v
adp
为自适应值,v
adp
会被存储在rom中;步骤5,计算输出力矩,计算公式为t
motor
=mmot*x
gearsign
,其中t
motor
为输出的电机力矩,x
gearsign
为表示电机扭矩符号是否与扭杆扭矩符号相反的符号。
13.所述的步骤1中最小纵向加速度为及0.3 m/s2。
14.本发明同现有技术相比,提供一种基于学习的汽车急加速跑偏补偿方法,该方法具备学习模块、验证模块及计算模块等三大模块,学习模块判断是否符合跑偏补偿学习条件,并计算自适应值验证模块根据 tbt 的平均值来判断学习得到的自适应值是否有效;计算模块根据自适应值和车辆加速度计算产生扭力转向时所需电机力矩,并根据车速和转向
角度进行修正,提供驾驶稳定性和安全性。
附图说明
15.图1至图6为本发明实施例的线条示意图。
具体实施方式
16.下面根据附图对本发明做进一步的说明。
17.一种基于学习的汽车急加速跑偏补偿方法,其特征在于:所述的跑偏补偿方法包括学习模块、验证模块、计算模块;学习模块:判断是否符合跑偏补偿学习条件,若满足学习条件,则识别学习工况并计算自适应值;验证模块:根据 tbt 的平均值来判断学习得到的自适应值是否有效,并验证学习工况,tbt为方向盘扭矩;计算模块:根据自适应值和车辆加速度计算产生扭力转向时所需电机力矩,并根据车速和转向角度进行修正。
18.所述的学习条件的选择,当以下条件全部符合时,满足自学习工况,条件1,车辆纵向加速度a
lgt
超过自学习工况纵向加速度的最小值时, 此条件表明汽车正处于加速工况;条件2,车速超过自学习工况最小车速;条件3,横向加速度小于自学习工况最大横向加速度、横摆速度小于自学习工况最大横摆角速度,方向盘角度小于自学习工况最大转向盘角度;这些条件表明驾驶员通过施加方向盘扭矩 tbt 成功抑制了扭力转向,车辆处于稳定状态;条件4,所有输入 can 信号值均有效,其中can信号包括车速信号,驱动轴力矩信号,纵向加速度信号,横摆角速度信号和横向加速度信号。
19.所述的条件1中自学习工况纵向加速度的最小值为1m/s
²
。
20.所述的条件2中自学习工况最小车速为2km/h。
21.所述的条件3中自学习工况最大横向加速度为0.5m/s
²
;自学习工况最大横摆角速度为1.0
°
/s;自学习工况最大转向盘角度为2
°
。
22.所述的学习过程自适应值计算的流程如下:步骤1,初始化上电阶段,自适应值v
adp
使用上次存储在rom中的自适应值;步骤2,若满足自学工况后,开始自学习;步骤3,计算标准化输入值,计算公式为v
nml_input = a
lgt * x
ninputvalue
或者v
nml_input = m
ds_trq * x
ninputvalue,
其中v
nml_input
为标准化输入值,a
lgt
为车辆纵向加速度,m
ds_trq
为驱动轴力矩,x
ninputvalue
为将纵向加速度或驱动轴扭矩转化为标准化输入的折算系数;步骤4,计算初始学习值,基于标准化输入值查表得到初始学习值v
ini
,其中查找表为一维查找表,输入为标准化输入,输出为得到的初始学习值;步骤5,自学习过程计算自适应值,计算公式为v
adp = {sum of
ꢀꢀvini
} / t
learn
,其中t
learn
为求平均v
adp
的的去抖滤波时间,sum of (v
init
表示在t
lern
时间段内 v
ini
的累加值;步骤6,当不满足自学工况后,不进行学习,自适应值使用上次计算的自适应学习
值。
23.所述的验证学习工况的流程如下:步骤1,满足自学工况后,开始进行验证;步骤2,验证过程计算平均方向盘扭矩tbt
avg
,计算公式为tbt
avg = (sum of tbt / t
valid
) ,其中tbt
avg 为平均方向盘扭矩,sum of tbt为的t
valid
时间内方向盘扭矩累加和,t
valid
为求平均tbt
avg
的去抖滤波时间;步骤3,如果平均方向盘扭矩tbt
avg
超过用于验证自学习结果的最大方向盘力矩,则清零 v
adp
,在下一个周期重新进入学习模块进行自学习;否则,认为请求的电机力矩刚好抵消扭力转向,自学习的值有效;步骤4,当不满足自学工况后,不进行验证,自适应值使用上次得到的自适应学习值;步骤5,将得到的自适应学习值v
adp
存储在rom中。
24.所述的步骤3中最大方向盘力矩为2n。
25.计算及补偿的电机力矩的流程如下:步骤1,当车辆标准化输入超过进行力矩补偿的最小纵向加速度时,根据学习结果计算输出电机力矩;步骤2,计算车速修正系数,根据车速查表得到考虑实际车速计算补偿电机力矩的修正系数 xv,其中查找表为一维查找表,输入为车速v,输出为得到的车速修正系数;步骤3,计算转向角度修正系数,根据转向角度查表得到为考虑实际方向盘转角计算补偿电机力矩的修正系数xw,其中查找表为一维查找表,输入为转向角度w,输出为得到的转向角度修正系数;步骤4,计算补偿的电机力矩mmot,计算公式为mmot = x
v * x
w * v
adp
,其中xv为考虑实际车速计算补偿电机力矩的修正系数,xw为考虑实际方向盘转角计算补偿电机力矩的修正系数,v
adp
为自适应值,v
adp
会被存储在rom中;步骤5,计算输出力矩,计算公式为t
motor
=mmot*x
gearsign
,其中t
motor
为输出的电机力矩,x
gearsign
为表示电机扭矩符号是否与扭杆扭矩符号相反的符号。
26.所述的步骤1中最小纵向加速度为及0.3 m/s2。
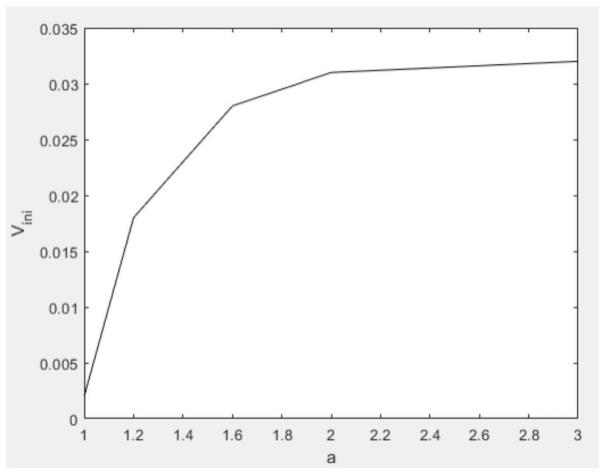
27.实施例:如图1所示,基于标准化输入的查找表x轴为标准化输入,其值为[1;1.2;1.6;2;3],y轴为初始学习值v
ini
,其值为[0.002;0.018;0.028;0.031;0.032]。
[0028]
如图2所示,车速修正系数,根据车速查表得到考虑实际车速计算补偿电机力矩的修正系数xv。x轴输入为车速v,其值为[0;30;50;60;80],y轴车速修正系数xv,其值为[0.379;0.5;0.847;0.97;1]。
[0029]
如图3所示,转向角度修正系数,其中查找表为一维查找表,x轴为转向角度w,其值为[0;0.6;0.8;1;1.5],y轴为得到的转向角度修正系数xw,其值为[0.8;0.85;0.9;0.95;1]。
[0030]
如图4所示,第一种工况:当初始加速度为10m/s,加速度为0.5m/s2时,转向角度为1,方向盘扭矩tbt为1nm,且上次存在rom中的v
adp
值为0.18,输出的电机力矩如下图所示:其中横轴为时间,y轴为输出力矩。学习条件不满足,此时使用的是上次存储在rom中的v
adp
值。
[0031]
如图5所示,第二种工况:当初始加速度为10m/s,加速度为1.5m/s2时,转向角度为1,方向盘扭矩tbt为1nm。且上次存在rom中的v
adp
值为0.018,输出的电机力矩如下图所示:其中横轴为时间,y轴为输出力矩。此时初次使用的是上次存储在rom中的v
adp
值,然后满足学习条件使用的是计算的v
adp
值。
[0032]
如图6所示,第三种工况:当初始加速度为10m/s,加速度为1.5m/s2时,转向角度为1,方向盘扭矩tbt初始为1nm,当40s后方向盘扭矩tbt持续为2.5nm。且上次存在rom中的v
adp
值为0.018,输出的电机力矩如下图所示:其中横轴为时间,y轴为输出力矩。当tbt大于2nm,验证不满足后,输出为0。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1