一种自动驾驶碰撞风险的安全处理方法与流程
1.本发明涉及自动避碰技术领域,尤其是涉及一种自动驾驶碰撞风险的安全处理方法。
背景技术:
2.随着科技的不断发展,汽车已经成为我们生活中不能或缺的一种交通工具,汽车的自动驾驶技术也已经慢慢地融入到我们的生活中来。自动紧急制动是一种主动安全技术,测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,系统探测到极有可能发生碰撞时主动制动,用以降低车辆速度并尽可能避免碰撞的发生。人工接管用于紧急情况下或智能驾驶系统传感器发送严重失效及误判情况下的保障措施。
3.常用的主动避碰方案为,通过持续对车辆制动踏板的制动情况进行检测,若制动踏板被快速制动,则推断出存在碰撞危险,系统对车辆周围的物体相对于车辆的位置和运动进行检测,并评价碰撞危险,当系统判定仅采取制动不能避免碰撞而采取转向避让可以避免碰撞时,系统接管方向盘实现主动避让操作。通过制动踏板的快速制动来推断碰撞危险,系统容易产生误判断;驾驶员采取制动踏板的操作使得系统对车速的变化难以估计,车辆的实际避让轨迹与理论轨迹可能存在较大的偏差,避碰的可靠性低。因此,找到一种可以解决上述问题的方法,是我们亟待解决的问题。
技术实现要素:
4.鉴于以上现有技术的不足,本发明提供了一种自动驾驶碰撞风险的安全处理方法,不仅分析了感知信息异常及决策算法失效时的安全处理机制,而且最大程度保证了行车安全。
5.为了实现上述目的及其他相关目的,本发明提供的技术方案如下:一种自动驾驶碰撞风险的安全处理方法,包括以下步骤:
6.p1:车辆独立接收感知、定位、地图信息;
7.p2:基于上述信息,所述车辆的感知模块感知目标进行危险目标筛选,以得到潜在危险目标;
8.p3:针对所述潜在危险目标进行威胁判断,基于决策算法、延迟控制算法、调整决策阀值和紧急制动算法,输出紧急情况对应决策结果;
9.p4:将所述紧急情况对应决策结果输出给所述车辆的控制模块。
10.进一步地,在步骤p2中,当无法获得所述车辆的感知模块的感知信息时,包括以下处理方法:
11.f1.判断感知模块不能正常工作,所述车辆紧急制动并hmi播报;
12.f2.判断感知模块能正常工作,根据所述车辆的上一帧全局轨迹,得出所述感知模块多帧丢失,不能发送感知数据,从而所述车辆减速及停车并hmi播报。
13.进一步地,在步骤p3中,当无法获得准确定位、地图、感知信息时,不能进行所述潜在危险目标的筛选,包括以下处理方法:
14.a1.当定位信号不稳定时,从而定位精度较低,导致误差判断较小时,所述车辆基于决策算法阀值自适应调整并hmi播报;或误差判断较大时,所述车辆减速及停车并hmi播报;
15.a2.当定位信号不稳定时,从而定位信号丢失,根据所述车辆上一帧数据,得出所述车辆的定位传感器不能正常工作或定位算法不能正常工作,所述车辆减速及停车并hmi播报;
16.a3.当感知信号不稳定时,所述车辆的感知精度误差判断的输入、感知漏检情况输入、感知种类误差判断输入,输出误差允许,则所述车辆基于决策算法阀值自适应调整并hmi播报;或误差较大,则所述车辆减速及停车并hmi播报。
17.进一步地,在步骤p4中,所述紧急情况对应决策结果的决策失效记录包括:静态障碍物漏检及误差、制动障碍漏检及误差和行人盲区漏检及误差;当得出所述决策结果的决策算法调整过大,从而输入误差超过决策阀值,则所述车辆减速及停车并hmi播报;当所述决策结果延迟超过阀值,则输出记录数据等待工程师修改,从而所述车辆减速及停车并hmi播报。
18.进一步地,所述的紧急制动算法,包括:
19.d1.基于两车同向或同车道的准则,得出紧急制动的最小距离d
min
:
[0020][0021]
其中,d
min
为最小限车距离,a
min,brake
为最小加速度,汽车速度vr在反应时间ρ内的最大加速度a
max,accel
,汽车速度vf下的最大加速度a
max,brake
;
[0022]
d2.基于两车并线,得出紧急制动的最小距离d
min
:
[0023][0024]
其中μ为两车车门之间的距离,v1,v2为两车的速度,v
1,ρ
,v
2,ρ
分别为在反应时间ρ下的两车速度,a
latmin,brake
为两车制动加速度。
[0025]
进一步地,所述延迟控制算法,包括以下步骤:
[0026]
q1.获取多条所述潜在危险目标检测序列,每个所述潜在危险目标序列包括多个目标对象的目标状态数据;
[0027]
q2.基于时间戳的多条所述潜在危险目标检测序列,对j条所述潜在危险目标检测序列中的目标状态数据进行预测,得到第j+1条危险目标检测序列和对应的目标状态数据;
[0028]
q3.基于实际场景实车测试,得出第j+1条所述潜在危险目标检测序列对应的目标状态数据;
[0029]
q4.将步骤q2和q3得到所述潜在危险目标检测序列对应的目标状态数据进行进行去重处理,消除因计算和信号延迟产生的数据误差,融合以得到第j+1条融合潜在危险目标序列。
[0030]
本发明具有以下积极效果:
[0031]
本发明提出了自动驾驶车辆在自车道行驶及换道两种常见的场景下的紧急主动算法模型,并根据场景及危险情况,车辆采取的动作分别为,改变rss公式输入、输出普通停车指令、直接采用最大制动。最后,分析了感知信息异常及决策算法失效时的安全处理机制,最大程度保证了行车安全。
附图说明
[0032]
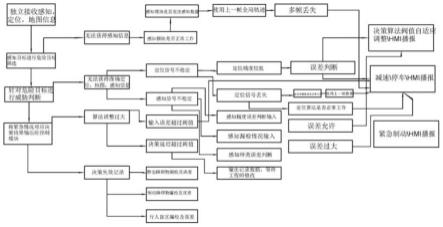
图1为本发明算法流程图。
具体实施方式
[0033]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0034]
实施例:如图1所示,一种自动驾驶碰撞风险的安全处理方法,包括以下步骤:
[0035]
p1:车辆独立接收感知、定位、地图信息;
[0036]
p2:基于上述信息,所述车辆的感知模块感知目标进行危险目标筛选,以得到潜在危险目标;
[0037]
p3:针对所述潜在危险目标进行威胁判断,基于决策算法、延迟控制算法、调整决策阀值和紧急制动算法,输出紧急情况对应决策结果;
[0038]
p4:将所述紧急情况对应决策结果输出给所述车辆的控制模块。
[0039]
进一步地,在步骤p2中,当无法获得所述车辆的感知模块的感知信息时,包括以下处理方法:
[0040]
f1.判断感知模块不能正常工作,所述车辆紧急制动并hmi播报;
[0041]
f2.判断感知模块能正常工作,根据所述车辆的上一帧全局轨迹,得出所述感知模块多帧丢失,不能发送感知数据,从而所述车辆减速及停车并hmi播报。进一步地,在步骤p3中,当无法获得准确定位、地图、感知信息时,不能进行所述潜在危险目标的筛选,包括以下处理方法:
[0042]
a1.当定位信号不稳定时,从而定位精度较低,导致误差判断较小时,所述车辆基于决策算法阀值自适应调整并hmi播报;或误差判断较大时,所述车辆减速及停车并hmi播报;
[0043]
a2.当定位信号不稳定时,从而定位信号丢失,根据所述车辆上一帧数据,得出所述车辆的定位传感器不能正常工作或定位算法不能正常工作,所述车辆减速及停车并hmi播报;
[0044]
a3.当感知信号不稳定时,所述车辆的感知精度误差判断的输入、感知漏检情况输入、感知种类误差判断输入,输出误差允许,则所述车辆基于决策算法阀值自适应调整并hmi播报;或误差较大,则所述车辆减速及停车并hmi播报。
[0045]
进一步地,在步骤p4中,所述紧急情况对应决策结果的决策失效记录包括:静态障碍物漏检及误差、制动障碍漏检及误差和行人盲区漏检及误差;当得出所述决策结果的决策算法调整过大,从而输入误差超过决策阀值,则所述车辆减速及停车并hmi播报;当所述决策结果延迟超过阀值,则输出记录数据等待工程师修改,从而所述车辆减速及停车并hmi
播报。
[0046]
进一步地,:所述的紧急制动算法,包括:
[0047]
d1.基于两车同向或同车道的准则,得出紧急制动的最小距离d
min
:
[0048][0049]
其中,d
min
为最小限车距离,a
min,brake
为最小加速度,汽车速度vr在反应时间ρ内的最大加速度a
max,accel
,汽车速度vf下的最大加速度a
max,brake
;
[0050]
d2.基于两车并线,得出紧急制动的最小距离dmin:
[0051][0052]
其中μ为两车车门之间的距离,v1,v2为两车的速度,v
1,ρ
,v
2,ρ
分别为在反应时间ρ下的两车速度,a
latmin,brake
为两车制动加速度。
[0053]
进一步地,所述延迟控制算法,包括以下步骤:
[0054]
q1.获取多条所述潜在危险目标检测序列,每个所述潜在危险目标序列包括多个目标对象的目标状态数据;
[0055]
q2.基于时间戳的多条所述潜在危险目标检测序列,对j条所述潜在危险目标检测序列中的目标状态数据进行预测,得到第j+1条危险目标检测序列和对应的目标状态数据;
[0056]
q3.基于实际场景实车测试,得出第j+1条所述潜在危险目标检测序列对应的目标状态数据;
[0057]
q4.将步骤q2和q3得到所述潜在危险目标检测序列对应的目标状态数据进行进行去重处理,消除因计算和信号延迟产生的数据误差,融合以得到第j+1条融合潜在危险目标序列。
[0058]
具体地,失效诊断主要依据传感器端的自动信息发布,决策算法输入信息状态以及动力学预测模型,自主判断感知信息是否存在延误或信号丢失情况。最终感知输入准确度无影响时并且场景不构成危险发生时系统不发生改变。传感器的失效程度对精度造成一定影响并存在碰撞可能性时,调整算法输入量或相应阈值,保障不发生碰撞。当输入信号误差较大时,将依据高置信度范围内最危险信号输入进行决策计算,以保守的输入信号进行决策算法计算。当输入信号误差导致紧急制动算法影响其他正常决策行为时,根据前几帧输入结果判断的环境情况进行安全保证停车。当发生输入信号丢失或输入信息完全失真情况时,进行紧急制动。并将失效情况进行hm i输出。
[0059]
紧急制动算法依据车道,障碍物位置、速度和加速度信息进行决策计算,保障不发生碰撞。在算法细节上可能由于计算能力或计算方式造成决策延迟问题,同时可能由于特殊为考虑场景造成决策算法无解或不包含特殊场景的问题,导致决策结果产生较大偏差或不进行决策行为的发生。
[0060]
失效诊断依据算法内对输入输出时间戳的实时监测以及实际场景实车测试。准确输出决策延时时间序列输出给失效处理单元,并在实际场景进行测试,人工判断是否存在无效场景。针对无效场景情况提前进行算法改进消除未覆盖场景。针对决策延迟情况,配合感知延迟信息,进行延迟控制算法调整,决策阈值调整,以及紧急制动三种应对方法,并配
合hmi提示。在可控延迟范围内,采用延迟控制算法和阈值调整混合策略,首先通过延迟控制算法降低延迟信号影响,同时调整紧急避让阈值保障行驶安全。当延迟量产生较大威胁,进行紧急制动处理。在复杂场景下解决由于计算能力或计算方式的限制造成优化算法求解过程出现无解或者运算缓慢的问题。
[0061]
综上所述,本发明分析了感知信息异常及决策算法失效时的安全处理机制,最大程度保证了行车安全。
[0062]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1