一种新能源汽车的太阳能充电方法及新能源汽车与流程
1.本技术涉及新能源汽车技术领域,具体涉及一种新能源汽车的太阳能充电方法及新能源汽车。
背景技术:
2.当前,市面上的一些新能源汽车的车顶配备有太阳能面板(这种车顶也称为太阳能车顶),利用车顶配备的太阳能面板可以给新能源汽车的蓄电池充电,从而提升新能源汽车的续航里程。
3.在实践中发现,现有的新能源汽车的车顶配备的太阳能面板的光电转换效率短期内很难有太大突破,并且当车顶配备有太阳能面板的新能源汽车停放在露天停车场的某一停车位时,随时间的变化该停车位若逐渐被树木或建筑物的阴影覆盖,则会影响新能源汽车的车顶配备的太阳能面板充入蓄电池的电量。
技术实现要素:
4.本技术实施例公开了一种新能源汽车的太阳能充电方法及新能源汽车,有利于提升新能源汽车的车顶配备的太阳能面板充入蓄电池的电量。
5.本技术实施例第一方面公开一种新能源汽车的太阳能充电方法,所述新能源汽车的车顶配备有太阳能面板,所述方法包括:
6.检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率;其中,所述当前停车位位于某一露天停车场内;
7.若是,控制所述新能源汽车自动驶出所述当前停车位,并记录所述新能源汽车沿所述露天停车场内的指定路线自动行驶时所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率;
8.从所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率中确定出最大历史输出功率;
9.控制所述新能源汽车自动驶回所述各个位置中的所述最大历史输出功率对应的目标位置;
10.控制所述新能源汽车从所述目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电。
11.作为一种可选的实施方式,在本技术实施例第一方面中,在检测出所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率低于所述目标输出功率之后,所述方法还包括:
12.检测所述新能源汽车配置的基于自动驾驶的智能移位充电模式是否已开启,若已开启,执行所述的控制所述新能源汽车自动驶出所述当前停车位的步骤。
13.作为另一种可选的实施方式,在本技术实施例第一方面中,在检测出所述新能源汽车配置的基于自动驾驶的智能移位充电模式开启之后,所述方法还包括:
14.从网络侧获取所述露天停车场所在的指定行政区域的当天日出时间和当前日落时间;
15.判断当前时间是否位于所述当天日出时间与所述当前日落时间之间,若是,执行所述的控制所述新能源汽车自动驶出所述当前停车位的步骤。
16.作为另一种可选的实施方式,在本技术实施例第一方面中,在判断出当前时间位于所述当天日出时间与所述当前日落时间之间之后,所述方法还包括:
17.检测由所述太阳能面板一并参与供电的所述新能源汽车的蓄电池的当前电量是否高于设定电量,若否,执行所述的控制所述新能源汽车自动驶出所述当前停车位的步骤。
18.作为另一种可选的实施方式,在本技术实施例第一方面中,所述检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率之前,所述方法还包括:
19.在驾驶员的左手和右手同时握持所述新能源汽车的圆形方向盘并且所述左手施加在所述圆形方向盘的第一指定位置处的第一握持力以及所述右手施加在所述圆形方向盘的第二指定位置处的第二握持力均超过预设握持力时,检测出所述左手在握持所述圆形方向盘的状态下从所述第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行的第一滑动靠近操作停止滑动时所述左手途径过的方向盘第一弧长;
20.判断所述方向盘第一弧长是否超过指定弧长,若是,开启所述新能源汽车配置的基于自动驾驶的智能移位充电模式。
21.作为另一种可选的实施方式,在本技术实施例第一方面中,所述开启所述新能源汽车配置的基于自动驾驶的智能移位充电模式之后,以及所述检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率之前,所述方法还包括:
22.在驾驶员的左手和右手同时握持所述新能源汽车的圆形方向盘并且所述左手施加在所述圆形方向盘的所述第一指定位置处的第三握持力以及所述右手施加在所述圆形方向盘的所述第二指定位置处的第四握持力均超过所述预设握持力时,检测出所述右手在握持所述圆形方向盘的状态下从所述第二指定位置处沿所述圆形方向盘向握持在所述第一指定位置处的所述左手进行的第二滑动靠近操作停止滑动时所述右手途径过的方向盘第二弧长;
23.判断所述方向盘第二弧长是否超过所述指定弧长,若否,将预设的太阳能面板最低输出功率作为所述目标输出功率;若超过,获取所述方向盘第二弧长与所述指定弧长的弧长差,并且获取与所述弧长差成正比例关系的输出功率变化量,以及获取所述输出功率变化量与所述预设的太阳能面板最低输出功率的和值作为所述目标输出功率。
24.作为另一种可选的实施方式,在本技术实施例第一方面中,所述控制所述新能源汽车从所述目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电之后,所述方法还包括:
25.向所述新能源汽车登记的车主电子设备发送移位充电通知消息,所述移位充电通知消息至少包括所述最接近所述目标位置的空闲停车位的位置信息。
26.作为另一种可选的实施方式,在本技术实施例第一方面中,所述新能源汽车上设置有第一uwb天线,所述控制所述新能源汽车自动驶出所述当前停车位之后,所述方法还包
括:
27.在所述新能源汽车沿所述露天停车场内的所述指定路线自动行驶时,探测所述第一uwb天线是否与所述露天停车场内的其他任一汽车上设置的第二uwb天线之间的距离小于或等于预设距离;
28.若是,控制所述第一uwb天线向所述其他任一汽车上设置的第二uwb天线发送携带有所述当前停车位的位置信息的、用于描述太阳能面板在所述当前停车位的当前输出功率低于所述目标输出功率的第一交互消息,使得所述其他任一汽车根据所述第一交互信息获悉太阳能面板在所述当前停车位的当前输出功率低于所述目标输出功率。
29.作为另一种可选的实施方式,在本技术实施例第一方面中,所述新能源汽车的车头前端设置有外拍摄模组,所述控制所述新能源汽车自动驶回所述各个位置中的所述最大历史输出功率对应的目标位置之后,以及控制所述新能源汽车从所述目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电之前,所述方法还包括:
30.通过所述外拍摄模组识别出所述第一uwb天线最接近的某一第二uwb天线所在的目标汽车的即时停车位;所述目标汽车的即时停车位位于所述露天停车场内;
31.判断所述露天停车场是否存在若干空闲停车位,若存在,从所述若干空闲停车位中确定出目标空闲停车位;其中,所述目标空闲停车位是所述若干空闲停车位中最接近所述目标位置的一个空闲停车位;
32.判断所述目标汽车的即时停车位与所述目标空闲停车相比是否更接近所述目标位置,若否,将所述目标空闲停车作为最接近所述目标位置的空闲停车位;
33.若所述目标汽车的即时停车位与所述目标空闲停车相比更接近所述目标位置,则控制所述第一uwb天线向所述某一第二uwb天线发送移位请求,以触发所述目标汽车与所述目标汽车的车主进行交互并在所述目标汽车的车主允许下从所述即时停车位移出以响应所述移位请求;以及,在通过所述外拍摄模组识别出所述目标汽车从所述即时停车位移出之后,将空闲的所述即时停车位作为最接近所述目标位置的空闲停车位。
34.本技术实施例第二方面公开一种新能源汽车,所述新能源汽车的车顶配备有太阳能面板,所述新能源汽车包括:
35.存储有可执行程序代码的存储器;
36.以及,与所述存储器耦合的处理器;
37.其中,所述处理器调用所述存储器中存储的所述可执行程序代码,执行本技术实施例第一方面或本技术实施例第一方面的任一种可选的实施方式公开的新能源汽车的太阳能充电方法。
38.与现有技术相比,本技术实施例具有以下有益效果:
39.本技术实施例中,所述新能源汽车在检测出其车顶配备的太阳能面板在所述新能源汽车所处的某一露天停车场内的当前停车位的当前输出功率低于目标输出功率时,可以控制所述新能源汽车自动驶出所述当前停车位,并记录所述新能源汽车沿所述露天停车场内的指定路线自动行驶时所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率,以及从所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率中确定出最大历史输出功率之后,控制所述新能源汽车从所述最大历史输出功率对应的目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电,从而有利于提升所述新能源汽
车的车顶配备的所述太阳能面板充入蓄电池的电量,进而有利于提升所述新能源汽车的续航里程。
附图说明
40.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
41.图1是本技术实施例公开的新能源汽车的太阳能充电方法的第一实施例的流程示意图;
42.图2是本技术实施例公开的新能源汽车的太阳能充电方法的第二实施例的流程示意图;
43.图3是本技术实施例公开的新能源汽车的太阳能充电方法的第三实施例的流程示意图;
44.图4是本技术实施例公开的新能源汽车的太阳能充电方法的第四实施例的流程示意图;
45.图5是本技术实施例公开的一种新能源汽车的架构示意图。
具体实施方式
46.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
47.需要说明的是,本技术实施例的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
48.本技术实施例公开了一种新能源汽车的太阳能充电方法及新能源汽车,有利于提升新能源汽车的车顶配备的太阳能面板充入蓄电池的电量,进而有利于提升所述新能源汽车的续航里程。以下进行结合附图进行详细描述。
49.请参阅图1,图1是本技术实施例公开的新能源汽车的太阳能充电方法的第一实施例的流程示意图。在图1所示的新能源汽车的太阳能充电方法中,所述新能源汽车的车顶配备有太阳能面板,所述太阳能面板参与向所述新能源汽车的蓄电池的供电作业。如图1所示,所述新能源汽车的太阳能充电方法可以包括以下步骤:
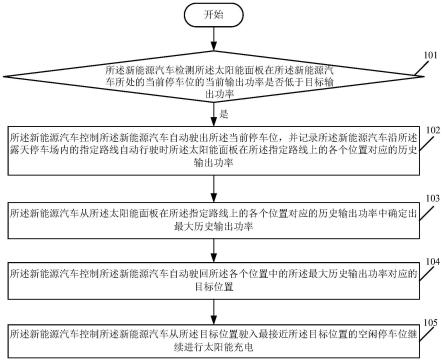
50.101、所述新能源汽车检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率;其中,所述当前停车位位于某一露天停车场内;若否,结束本流程;若是,执行步骤102-步骤105。
51.本技术实施例中,所述新能源汽车可以在定位出所述新能源汽车所处的当前停车位位于某一露天停车场内并且所述新能源汽车的车主对所述新能源汽车进行锁车并离开
所述新能源汽车之后,才检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率;其中,所述当前停车位位于某一露天停车场内;若否,结束本流程;若是,执行步骤102-步骤105。
52.本技术实施例中,随时间的变化所述当前停车位若逐渐被树木或建筑物的阴影覆盖,那么所述新能源汽车可以检测出所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率低于所述目标输出功率。
53.102、所述新能源汽车控制所述新能源汽车自动驶出所述当前停车位,并记录所述新能源汽车沿所述露天停车场内的指定路线自动行驶时所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率。
54.本技术实施例中,所述新能源汽车可以控制所述新能源汽车按照自动驾驶策略自动驶出所述当前停车位,并记录所述新能源汽车按照自动驾驶策略沿所述露天停车场内的指定路线自动行驶时所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率。
55.在一些实施方式中,所述新能源汽车可以在定位出所述新能源汽车所处的当前停车位位于某一露天停车场内并且所述新能源汽车的车主尚未下车之前,控制所述新能源汽车的中控显示屏上显示出包含所述某一露天停车场的电子地图,并且存储所述新能源汽车的车主通过所述电子地图中设置的所述露天停车场内的某一指定路线。
56.103、所述新能源汽车从所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率中确定出最大历史输出功率。
57.104、所述新能源汽车控制所述新能源汽车自动驶回所述各个位置中的所述最大历史输出功率对应的目标位置。
58.本技术实施例中,所述新能源汽车可以控制所述新能源汽车基于自动驾驶策略自动驶回所述各个位置中的所述最大历史输出功率对应的目标位置。
59.105、所述新能源汽车控制所述新能源汽车从所述目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电。
60.作为一种可选的实施方式,在图1所示的所述新能源汽车的太阳能充电方法中,所述新能源汽车执行步骤105之后,还可以执行如下步骤:
61.所述新能源汽车向所述新能源汽车登记的车主电子设备发送移位充电通知消息,所述移位充电通知消息至少包括所述最接近所述目标位置的空闲停车位的位置信息,从而可以方便所述新能源汽车的车主在所述露天停车场内寻找所述新能源汽车。
62.本技术实施例中,实施图1所示的新能源汽车的太阳能充电方法,有利于提升所述新能源汽车的车顶配备的所述太阳能面板充入蓄电池的电量,进而有利于提升所述新能源汽车的续航里程。
63.请参阅图2,图2是本技术实施例公开的新能源汽车的太阳能充电方法的第二实施例的流程示意图。在图2所示的新能源汽车的太阳能充电方法中,所述新能源汽车的车顶配备有太阳能面板,所述太阳能面板参与向所述新能源汽车的蓄电池的供电作业。如图2所示,所述新能源汽车的太阳能充电方法可以包括以下步骤:
64.201、所述新能源汽车检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率;其中,所述当前停车位位于某一露天停车场内;若否,结束本流程;若是,执行步骤202。
65.作为一种可选的实施方式,在图2所示的所述新能源汽车的太阳能充电方法中,所述新能源汽车执行步骤201之前,可以先执行如下步骤:
66.在驾驶员的左手和右手同时握持所述新能源汽车的圆形方向盘并且所述左手施加在所述圆形方向盘的第一指定位置处的第一握持力以及所述右手施加在所述圆形方向盘的第二指定位置处的第二握持力均超过预设握持力时,检测出所述左手在握持所述圆形方向盘的状态下从所述第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行的第一滑动靠近操作停止滑动时所述左手途径过的方向盘第一弧长;
67.判断所述方向盘第一弧长是否超过指定弧长,若是,开启所述新能源汽车配置的基于自动驾驶的智能移位充电模式。
68.本技术实施例中,所述新能源汽车可以通过所述圆形方向盘的周向上镶嵌的传感器检测出所述左手在握持所述圆形方向盘的状态下从所述第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行的第一滑动靠近操作停止滑动时所述左手途径过的方向盘第一弧长。其中,所述左手在握持所述圆形方向盘的状态下从所述第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行第一滑动靠近操作的过程中,所述左手会依次触摸所述圆形方向盘的周向上的多个传感器,而所述车辆可以根据被触摸的所述多个传感器的位置,识别出所述左手在握持所述圆形方向盘的状态下从所述第第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行的第一滑动靠近操作停止滑动时所述左手途径过的方向盘第一弧长。
69.其中,实施上述实施方式,使得驾驶员在驾驶所述新能源汽车的过程中双手全程放在所述圆形方向盘上即可便捷地、灵活地开启所述新能源汽车配置的基于自动驾驶的智能移位充电模式,不仅可以提高行车安全性,还可以提升所述新能源汽车的智能性和驾驶体验感。
70.作为一种可选的实施方式,在图2所示的所述新能源汽车的太阳能充电方法中,所述新能源汽车开启所述新能源汽车配置的基于自动驾驶的智能移位充电模式之后,以及执行步骤201之前,还可以执行如下步骤:
71.在驾驶员的左手和右手同时握持所述新能源汽车的圆形方向盘并且所述左手施加在所述圆形方向盘的所述第一指定位置处的第三握持力以及所述右手施加在所述圆形方向盘的所述第二指定位置处的第四握持力均超过所述预设握持力时,检测出所述右手在握持所述圆形方向盘的状态下从所述第二指定位置处沿所述圆形方向盘向握持在所述第一指定位置处的所述左手进行的第二滑动靠近操作停止滑动时所述右手途径过的方向盘第二弧长;
72.判断所述方向盘第二弧长是否超过所述指定弧长,若否,将预设的太阳能面板最低输出功率作为所述目标输出功率;若超过,获取所述方向盘第二弧长与所述指定弧长的弧长差,并且获取与所述弧长差成正比例关系的输出功率变化量,以及获取所述输出功率变化量与所述预设的太阳能面板最低输出功率的和值作为所述目标输出功率。
73.其中,实施上述实施方式,使得驾驶员在驾驶所述新能源汽车的过程中双手全程放在所述圆形方向盘上即可便捷地、灵活地为所述太阳能面板设置对应的目标输出功率,这样不仅可以提高行车安全性,还可以提升所述新能源汽车的智能性和驾驶体验感。
74.此外,实施上述实施方式,有利于提升所述新能源汽车检测出所述太阳能面板在
所述新能源汽车所处的当前停车位的当前输出功率低于所述目标输出功率的概率,进而有利于提升所述新能源汽车在所述新能源汽车配置的基于自动驾驶的智能移位充电模式下进行太阳能充电的概率。
75.202、所述新能源汽车检测所述新能源汽车配置的基于自动驾驶的智能移位充电模式是否已开启;若未开启,结束本流程;若已开启,执行步骤203-步骤204。
76.203、所述新能源汽车从网络侧获取所述露天停车场所在的指定行政区域的当天日出时间和当前日落时间。
77.示例性的,所述露天停车场所在的指定行政区域可以为某一城市,例如城市a的当天日出时间为06:48,当前日落时间为18:06。
78.204所述新能源汽车判断当前时间是否位于所述当天日出时间与所述当前日落时间之间;若否,结束本流程;若是,执行步骤205。
79.205所述新能源汽车检测由所述太阳能面板一并参与供电的所述新能源汽车的蓄电池的当前电量是否高于设定电量;若是,结束本流程;若否,执行步骤206-步骤209。
80.其中,实施上述步骤202-步骤205,可以准确的控制所述新能源汽车在所述新能源汽车配置的基于自动驾驶的智能移位充电模式下进行太阳能充电。
81.206、所述新能源汽车控制所述新能源汽车自动驶出所述当前停车位,并记录所述新能源汽车沿所述露天停车场内的指定路线自动行驶时所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率。
82.207、所述新能源汽车从所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率中确定出最大历史输出功率。
83.208、所述新能源汽车控制所述新能源汽车自动驶回所述各个位置中的所述最大历史输出功率对应的目标位置。
84.209、所述新能源汽车控制所述新能源汽车从所述目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电。
85.作为一种可选的实施方式,在图2所示的所述的新能源汽车的太阳能充电方法中,所述新能源汽车执行步骤209之后,还可以执行如下步骤:
86.所述新能源汽车向所述新能源汽车登记的车主电子设备发送移位充电通知消息,所述移位充电通知消息至少包括所述最接近所述目标位置的空闲停车位的位置信息。
87.本技术实施例中,实施图2所示的新能源汽车的太阳能充电方法,有利于提升所述新能源汽车的车顶配备的所述太阳能面板充入蓄电池的电量,进而有利于提升所述新能源汽车的续航里程。
88.请参阅图3,图3是本技术实施例公开的新能源汽车的太阳能充电方法的第三实施例的流程示意图。在图3所示的新能源汽车的太阳能充电方法中,所述新能源汽车的车顶配备有太阳能面板,所述太阳能面板参与向所述新能源汽车的蓄电池的供电作业;此外,所述新能源汽车上还设置有第一uwb(ultra-wide band,超宽带)天线。如图3所示,所述新能源汽车的太阳能充电方法可以包括以下步骤:
89.301、所述新能源汽车检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率;其中,所述当前停车位位于某一露天停车场内;若否,结束本流程;若是,执行步骤302。
90.作为一种可选的实施方式,在图3所示的所述新能源汽车的太阳能充电方法中,所述新能源汽车执行步骤301之前,可以先执行如下步骤:
91.在驾驶员的左手和右手同时握持所述新能源汽车的圆形方向盘并且所述左手施加在所述圆形方向盘的第一指定位置处的第一握持力以及所述右手施加在所述圆形方向盘的第二指定位置处的第二握持力均超过预设握持力时,检测出所述左手在握持所述圆形方向盘的状态下从所述第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行的第一滑动靠近操作停止滑动时所述左手途径过的方向盘第一弧长;
92.判断所述方向盘第一弧长是否超过指定弧长,若是,开启所述新能源汽车配置的基于自动驾驶的智能移位充电模式。
93.本技术实施例中,所述新能源汽车可以通过所述圆形方向盘的周向上镶嵌的传感器检测出所述左手在握持所述圆形方向盘的状态下从所述第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行的第一滑动靠近操作停止滑动时所述左手途径过的方向盘第一弧长。其中,所述左手在握持所述圆形方向盘的状态下从所述第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行第一滑动靠近操作的过程中,所述左手会依次触摸所述圆形方向盘的周向上的多个传感器,而所述车辆可以根据被触摸的所述多个传感器的位置,识别出所述左手在握持所述圆形方向盘的状态下从所述第第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行的第一滑动靠近操作停止滑动时所述左手途径过的方向盘第一弧长。
94.其中,实施上述实施方式,使得驾驶员在驾驶所述新能源汽车的过程中双手全程放在所述圆形方向盘上即可便捷地、灵活地开启所述新能源汽车配置的基于自动驾驶的智能移位充电模式,不仅可以提高行车安全性,还可以提升所述新能源汽车的智能性和驾驶体验感。
95.作为一种可选的实施方式,在图3所示的所述新能源汽车的太阳能充电方法中,所述新能源汽车开启所述新能源汽车配置的基于自动驾驶的智能移位充电模式之后,以及执行步骤301之前,还可以执行如下步骤:
96.在驾驶员的左手和右手同时握持所述新能源汽车的圆形方向盘并且所述左手施加在所述圆形方向盘的所述第一指定位置处的第三握持力以及所述右手施加在所述圆形方向盘的所述第二指定位置处的第四握持力均超过所述预设握持力时,检测出所述右手在握持所述圆形方向盘的状态下从所述第二指定位置处沿所述圆形方向盘向握持在所述第一指定位置处的所述左手进行的第二滑动靠近操作停止滑动时所述右手途径过的方向盘第二弧长;
97.判断所述方向盘第二弧长是否超过所述指定弧长,若否,将预设的太阳能面板最低输出功率作为所述目标输出功率;若超过,获取所述方向盘第二弧长与所述指定弧长的弧长差,并且获取与所述弧长差成正比例关系的输出功率变化量,以及获取所述输出功率变化量与所述预设的太阳能面板最低输出功率的和值作为所述目标输出功率。
98.其中,实施上述实施方式,使得驾驶员在驾驶所述新能源汽车的过程中双手全程放在所述圆形方向盘上即可便捷地、灵活地为所述太阳能面板设置对应的目标输出功率,这样不仅可以提高行车安全性,还可以提升所述新能源汽车的智能性和驾驶体验感。
99.此外,实施上述实施方式,有利于提升所述新能源汽车检测出所述太阳能面板在
所述新能源汽车所处的当前停车位的当前输出功率低于所述目标输出功率的概率,进而有利于提升所述新能源汽车在所述新能源汽车配置的基于自动驾驶的智能移位充电模式下进行太阳能充电的概率。
100.302、所述新能源汽车检测所述新能源汽车配置的基于自动驾驶的智能移位充电模式是否已开启;若未开启,结束本流程;若已开启,执行步骤303-步骤304。
101.303、所述新能源汽车从网络侧获取所述露天停车场所在的指定行政区域的当天日出时间和当前日落时间。
102.304所述新能源汽车判断当前时间是否位于所述当天日出时间与所述当前日落时间之间;若否,结束本流程;若是,执行步骤305。
103.305所述新能源汽车检测由所述太阳能面板一并参与供电的所述新能源汽车的蓄电池的当前电量是否高于设定电量;若是,结束本流程;若否,执行步骤206-步骤209。
104.306、所述新能源汽车控制所述新能源汽车自动驶出所述当前停车位,并记录所述新能源汽车沿所述露天停车场内的指定路线自动行驶时所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率;以及,在所述新能源汽车沿所述露天停车场内的所述指定路线自动行驶时,若探测出所述第一uwb天线与所述露天停车场内的其他任一汽车上设置的第二uwb天线之间的距离小于或等于预设距离,则控制所述第一uwb天线向所述其他任一汽车上设置的第二uwb天线发送携带有所述当前停车位的位置信息的、用于描述太阳能面板在所述当前停车位的当前输出功率低于所述目标输出功率的第一交互消息,使得所述其他任一汽车根据所述第一交互信息获悉太阳能面板在所述当前停车位的当前输出功率低于所述目标输出功率。
105.其中,对于所述其他任一汽车而言,在通过所述其他任一汽车设置的第二uwb天线收到所述第一交互消息之后,可以获得太阳能面板在所述当前停车位的当前输出功率低于所述目标输出功率,这样所述其他任一汽车在基于自动驾驶的智能移位充电模式下进行太阳能充电时可以将所述当前停车位进行排除,从而有利于所述其他任一汽车在基于自动驾驶的智能移位充电模式下快速寻找到太阳能面板输出功率高于所述目标输出功率的停车位。
106.307、所述新能源汽车从所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率中确定出最大历史输出功率。
107.308、所述新能源汽车控制所述新能源汽车自动驶回所述各个位置中的所述最大历史输出功率对应的目标位置。
108.309、所述新能源汽车控制所述新能源汽车从所述目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电。
109.作为一种可选的实施方式,在图3所示的所述的新能源汽车的太阳能充电方法中,所述新能源汽车执行步骤309之后,还可以执行如下步骤:
110.所述新能源汽车向所述新能源汽车登记的车主电子设备发送移位充电通知消息,所述移位充电通知消息至少包括所述最接近所述目标位置的空闲停车位的位置信息。
111.本技术实施例中,实施图3所示的新能源汽车的太阳能充电方法,有利于提升所述新能源汽车的车顶配备的所述太阳能面板充入蓄电池的电量,进而有利于提升所述新能源汽车的续航里程。
112.请参阅图4,图4是本技术实施例公开的新能源汽车的太阳能充电方法的第四实施例的流程示意图。在图4所示的新能源汽车的太阳能充电方法中,所述新能源汽车的车顶配备有太阳能面板,所述太阳能面板参与向所述新能源汽车的蓄电池的供电作业;此外,所述新能源汽车上还设置有第一uwb天线;此外,所述新能源汽车的车头前端设置有外拍摄模组。如图4所示,所述新能源汽车的太阳能充电方法可以包括以下步骤:
113.其中,步骤401-步骤408与前面实施例中的步骤301-步骤308相同,此处不作赘述。
114.409、所述新能源汽车通过所述外拍摄模组识别出所述第一uwb天线最接近的某一第二uwb天线所在的目标汽车的即时停车位;所述目标汽车的即时停车位位于所述露天停车场内。
115.410、所述新能源汽车判断所述露天停车场是否存在若干空闲停车位;若存在,执行步骤411-步骤412;若不存在,执行步骤414-步骤416。
116.411、所述新能源汽车从所述若干空闲停车位中确定出目标空闲停车位;其中,所述目标空闲停车位是所述若干空闲停车位中最接近所述目标位置的一个空闲停车位。
117.412、所述新能源汽车判断所述目标汽车的即时停车位与所述目标空闲停车相比是否更接近所述目标位置;若否,执行步骤413;若是,执行步骤414-步骤416。
118.413、所述新能源汽车将所述目标空闲停车作为最接近所述目标位置的空闲停车位,并跳转执行步骤416。
119.414、所述新能源汽车控制所述第一uwb天线向所述某一第二uwb天线发送移位请求,以触发所述目标汽车与所述目标汽车的车主进行交互并在所述目标汽车的车主允许下从所述即时停车位移出以响应所述移位请求。
120.415、所述新能源汽车在通过所述外拍摄模组识别出所述目标汽车从所述即时停车位移出之后,将空闲的所述即时停车位作为最接近所述目标位置的空闲停车位。
121.416、所述新能源汽车控制所述新能源汽车从所述目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电。
122.其中,实施上述步骤409-步骤416,有利于所述新能源汽车在基于自动驾驶的智能移位充电模式下寻找到太阳能面板输出功率最高的空闲停车位进行太阳能充电,有利于提升所述新能源汽车的太阳能充电效率。
123.作为一种可选的实施方式,在图4所示的所述的新能源汽车的太阳能充电方法中,所述新能源汽车执行步骤416之后,还可以执行如下步骤:
124.所述新能源汽车向所述新能源汽车登记的车主电子设备发送移位充电通知消息,所述移位充电通知消息至少包括所述最接近所述目标位置的空闲停车位的位置信息。
125.本技术实施例中,实施图4所示的新能源汽车的太阳能充电方法,有利于提升所述新能源汽车的车顶配备的所述太阳能面板充入蓄电池的电量,进而有利于提升所述新能源汽车的续航里程。
126.请参阅图5,图5是本技术实施例公开的一种新能源汽车的架构示意图。在图5所示的所述新能源汽车中,所述新能源汽车的车顶配备有太阳能面板。如图5所示,所述新能源汽车包括:
127.存储有可执行程序代码的存储器501;
128.与所述存储器501耦合的处理器502;
129.所述处理器502调用所述存储器501中存储的所述可执行程序代码,执行如下步骤:
130.检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率;其中,所述当前停车位位于某一露天停车场内;
131.若是,控制所述新能源汽车自动驶出所述当前停车位,并记录所述新能源汽车沿所述露天停车场内的指定路线自动行驶时所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率;
132.从所述太阳能面板在所述指定路线上的各个位置对应的历史输出功率中确定出最大历史输出功率;
133.控制所述新能源汽车自动驶回所述各个位置中的所述最大历史输出功率对应的目标位置;
134.控制所述新能源汽车从所述目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电。
135.作为一种可选的实施方式,在图5所示的所述新能源汽车中,在检测出所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率低于所述目标输出功率之后,所述处理器502还执行如下步骤:
136.检测所述新能源汽车配置的基于自动驾驶的智能移位充电模式是否已开启,若已开启,执行所述的控制所述新能源汽车自动驶出所述当前停车位的步骤。
137.作为一种可选的实施方式,在图5所示的所述新能源汽车中,在检测出所述新能源汽车配置的基于自动驾驶的智能移位充电模式开启之后,所述处理器502还执行如下步骤:
138.从网络侧获取所述露天停车场所在的指定行政区域的当天日出时间和当前日落时间;
139.判断当前时间是否位于所述当天日出时间与所述当前日落时间之间,若是,执行所述的控制所述新能源汽车自动驶出所述当前停车位的步骤。
140.作为一种可选的实施方式,在图5所示的所述新能源汽车中,在判断出当前时间位于所述当天日出时间与所述当前日落时间之间之后,所述处理器502还执行如下步骤:
141.检测由所述太阳能面板一并参与供电的所述新能源汽车的蓄电池的当前电量是否高于设定电量,若否,执行所述的控制所述新能源汽车自动驶出所述当前停车位的步骤。
142.作为一种可选的实施方式,在图5所示的所述新能源汽车中,所述检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率之前,所述处理器502还执行如下步骤:
143.在驾驶员的左手和右手同时握持所述新能源汽车的圆形方向盘并且所述左手施加在所述圆形方向盘的第一指定位置处的第一握持力以及所述右手施加在所述圆形方向盘的第二指定位置处的第二握持力均超过预设握持力时,检测出所述左手在握持所述圆形方向盘的状态下从所述第一指定位置处沿所述圆形方向盘向握持在所述第二指定位置处的所述右手进行的第一滑动靠近操作停止滑动时所述左手途径过的方向盘第一弧长;
144.判断所述方向盘第一弧长是否超过指定弧长,若是,开启所述新能源汽车配置的基于自动驾驶的智能移位充电模式。
145.作为一种可选的实施方式,在图5所示的所述新能源汽车中,所述开启所述新能源
汽车配置的基于自动驾驶的智能移位充电模式之后,以及所述检测所述太阳能面板在所述新能源汽车所处的当前停车位的当前输出功率是否低于目标输出功率之前,所述处理器502还执行如下步骤:
146.在驾驶员的左手和右手同时握持所述新能源汽车的圆形方向盘并且所述左手施加在所述圆形方向盘的所述第一指定位置处的第三握持力以及所述右手施加在所述圆形方向盘的所述第二指定位置处的第四握持力均超过所述预设握持力时,检测出所述右手在握持所述圆形方向盘的状态下从所述第二指定位置处沿所述圆形方向盘向握持在所述第一指定位置处的所述左手进行的第二滑动靠近操作停止滑动时所述右手途径过的方向盘第二弧长;
147.判断所述方向盘第二弧长是否超过所述指定弧长,若否,将预设的太阳能面板最低输出功率作为所述目标输出功率;若超过,获取所述方向盘第二弧长与所述指定弧长的弧长差,并且获取与所述弧长差成正比例关系的输出功率变化量,以及获取所述输出功率变化量与所述预设的太阳能面板最低输出功率的和值作为所述目标输出功率。
148.作为一种可选的实施方式,在图5所示的所述新能源汽车中,所述控制所述新能源汽车驶入最接近所述目标位置的空闲停车位继续进行太阳能充电之后,所述处理器502还执行如下步骤:
149.向所述新能源汽车登记的车主电子设备发送移位充电通知消息,所述移位充电通知消息至少包括所述最接近所述目标位置的空闲停车位的位置信息。
150.作为一种可选的实施方式,在图5所示的所述新能源汽车中,所述新能源汽车上设置有第一uwb天线,所述控制所述新能源汽车自动驶出所述当前停车位之后,所述处理器502还执行如下步骤:
151.在所述新能源汽车沿所述露天停车场内的所述指定路线自动行驶时,探测所述第一uwb天线是否与所述露天停车场内的其他任一汽车上设置的第二uwb天线之间的距离小于或等于预设距离;
152.若是,控制所述第一uwb天线向所述其他任一汽车上设置的第二uwb天线发送携带有所述当前停车位的位置信息的、用于描述太阳能面板在所述当前停车位的当前输出功率低于所述目标输出功率的第一交互消息,使得所述其他任一汽车根据所述第一交互信息获悉太阳能面板在所述当前停车位的当前输出功率低于所述目标输出功率。
153.作为一种可选的实施方式,在图5所示的所述新能源汽车中,所述新能源汽车的车头前端设置有外拍摄模组,所述控制所述新能源汽车自动驶回所述各个位置中的所述最大历史输出功率对应的目标位置之后,以及控制所述新能源汽车从所述目标位置驶入最接近所述目标位置的空闲停车位继续进行太阳能充电之前,所述处理器502还执行如下步骤:
154.通过所述外拍摄模组识别出所述第一uwb天线最接近的某一第二uwb天线所在的目标汽车的即时停车位;所述目标汽车的即时停车位位于所述露天停车场内;
155.判断所述露天停车场是否存在若干空闲停车位,若存在,从所述若干空闲停车位中确定出目标空闲停车位;其中,所述目标空闲停车位是所述若干空闲停车位中最接近所述目标位置的一个空闲停车位;
156.判断所述目标汽车的即时停车位与所述目标空闲停车相比是否更接近所述目标位置,若否,将所述目标空闲停车作为最接近所述目标位置的空闲停车位;
157.若所述目标汽车的即时停车位与所述目标空闲停车相比更接近所述目标位置,则控制所述第一uwb天线向所述某一第二uwb天线发送移位请求,以触发所述目标汽车与所述目标汽车的车主进行交互并在所述目标汽车的车主允许下从所述即时停车位移出以响应所述移位请求;以及,在通过所述外拍摄模组识别出所述目标汽车从所述即时停车位移出之后,将空闲的所述即时停车位作为最接近所述目标位置的空闲停车位。
158.本技术实施例中,实施图4所示的新能源汽车的太阳能充电系统,有利于提升所述新能源汽车的车顶配备的所述太阳能面板充入蓄电池的电量,进而有利于提升所述新能源汽车的续航里程。此外,实施图4所示的新能源汽车的太阳能充电系统带来的其他技术效果已在前面方法实施例中进行描述,此处不作赘述。
159.本技术实施例公开一种计算机可读存储介质,其存储计算机程序,其中,该计算机程序被处理器执行时实现以上各方法实施例中的部分或全部步骤。
160.本技术实施例公开一种计算机程序产品,其中,当计算机程序产品在计算机上运行时,使得计算机执行如以上各方法实施例中的部分或全部步骤。
161.本技术实施例公开一种应用发布平台,该应用发布平台用于发布计算机程序产品,其中,当上述计算机程序产品在计算机上运行时,使得计算机执行如以上各方法实施例中的方法的部分或全部步骤。
162.本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质包括只读存储器(rom)、随机存储器(ram)、可编程只读存储器(prom)、可擦除可编程只读存储器(eprom)、一次可编程只读存储器(otprom)、电子抹除式可复写只读存储器eeprom)、只读光盘(cd-rom)或其他光盘存储器、磁盘存储器、磁带存储器、或者能够用于携带或存储数据的计算机可读的任何其他介质。
163.以上对本技术实施例公开的一种新能源汽车的太阳能充电方法及新能源汽车进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,合法依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1