用于车门的线缆加强件的制作方法
1.本公开涉及用于车门的线缆加强件。
背景技术:
2.车辆可能会经历碰撞测试。在这些碰撞测试中使用标准化协议来评估车辆结构性能和乘员伤害值。这样的测试可以由各种政府或行业组织标准化。例如,一些测试测量车门侵入及/或车辆碰撞期间车辆乘员的移动,所述车辆碰撞使车辆乘员沿车辆横向方向移动。这些测试包括移动可变性障碍物侧面碰撞测试和侧面斜向碰撞测试。例如,fmvss 214对车辆的乘员强制执行静态车门侵入要求和动态碰撞限制。一些公共领域组织(诸如iihs)还在动态侧面碰撞期间测试乘员的运动控制。
技术实现要素:
3.一种车辆包括第一支柱和沿着车辆纵向轴线与所述第一支柱间隔开的第二支柱。旋转致动器设置在所述第一支柱处。所述旋转致动器相对于所述第一支柱固定。线缆与所述旋转致动器接合并且沿着所述车辆纵向轴线伸长到所述第二支柱。所述线缆可通过所述旋转致动器移动到展开位置,并且在所述展开位置处于张力下。
4.所述车辆可以包括第二旋转致动器,所述第二旋转致动器设置在所述第二支柱处并且相对于所述第二支柱固定。所述线缆可以与所述第二旋转致动器接合。
5.所述旋转致动器和所述第二旋转致动器各自可以包括电动马达。
6.所述旋转致动器和所述第二旋转致动器各自可以包括烟火填料。
7.所述车辆可以包括传感器和与所述传感器通信的计算机。所述计算机可以具有处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以基于所述传感器检测到预碰撞来控制所述旋转致动器和所述第二旋转致动器的致动。所述指令可以包括用于基于所述传感器未检测到碰撞来控制所述旋转致动器和所述第二旋转致动器的致动的指令。
8.所述线缆可以包括设置在所述第二支柱处的端部。所述端部可以相对于所述第二支柱固定。
9.所述车辆可以包括从所述第一支柱延伸到所述第二支柱的下边梁,以及从所述下边梁延伸到所述线缆的次级线缆。
10.所述次级线缆可以包括相对于所述下边梁固定的第一端和与所述线缆接合的第二端。
11.所述次级线缆可以与所述第一支柱和所述第二支柱等距地设置。
12.然后,所述线缆处于展开位置,所述次级线缆可以大致垂直于所述线缆延伸。
13.所述旋转致动器可以被配置为释放所述线缆中的张力。
14.所述车辆可以包括各自与所述线缆接合的两个可移动带轮。每个可移动带轮可以设置在一个相应的支柱处,并且可以被配置为当所述旋转致动器释放所述线缆中的张力时
将所述线缆引导到收起位置。
15.每个可移动带轮可以包括安装到相应的所述支柱的弹簧。所述弹簧可以被配置为使所述可移动带轮朝向收起位置偏置。
16.当所述线缆处于收起位置时,所述线缆中的张力可以相对于所述线缆处于展开位置时的张力被松弛。
17.所述车辆可以包括传感器和与所述传感器通信的计算机。所述计算机可以具有处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以基于所述传感器检测到预碰撞来控制所述旋转致动器的致动。所述指令可以包括用于基于所述传感器未检测到碰撞来控制所述旋转致动器的致动的指令。
18.处于展开位置的所述线缆可以沿着大致平行于车辆纵向轴线的轴线延伸。
19.所述旋转致动器可以是电动马达。
20.所述旋转致动器可以包括烟火填料。
附图说明
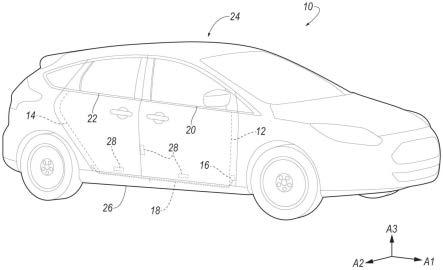
21.图1是包括以隐藏线示出且包括线缆和与线缆接合的旋转致动器的示例性线缆加强件的车辆的透视图。
22.图2a是包括处于收起位置的线缆的车辆的侧视图。
23.图2b是包括处于展开位置的线缆的车辆的侧视图。
24.图3a是包括马达的示例性旋转致动器的侧视图。
25.图3b是包括烟火填料的示例性旋转致动器的侧视图。
26.图4a是包括另一个示例性线缆加强件(包括处于收起位置的线缆和与线缆接合的第二旋转致动器)的车辆的侧视图。
27.图4b是包括图3a的包括处于展开位置的线缆的示例性线缆加强件的车辆的侧视图。
28.图5a是具有另一个示例性线缆加强件(包括处于收起位置的线缆和与线缆接合的可移动带轮)的车辆的侧视图。
29.图5b是包括图5a的包括处于展开位置的线缆的示例性线缆加强件的车辆的侧视图。
30.图6是用于车辆的控制系统的框图。
具体实施方式
31.参考附图,其中相同的附图标记贯穿若干视图表示相同的部分,总体上示出了车辆10。车辆10包括第一支柱12和沿着车辆纵向轴线a1与第一支柱12间隔开的第二支柱14。旋转致动器16设置在第一支柱12处。旋转致动器16相对于第一支柱12固定。线缆18与旋转致动器16接合并且沿着车辆纵向轴线a1伸长到第二支柱14。线缆18可通过旋转致动器16移动到展开位置,并且在展开位置处于张力下。
32.车辆10可以包括在第一支柱12和第二支柱14之间的一个或多个车门,例如,前车门20和/或后车门22。作为一个示例,车辆10可以包括在支柱12、14之间的一个车门20、22。作为另一个示例,车辆10可以包括在支柱12、14之间的两个车门20、22。在这样的示例中,车
辆10可以具有无b柱配置。换句话说,车辆10在前车门20与后车门22之间不包括支柱。由于线缆18从第一支柱12延伸到第二支柱14,即,跨过前车门20和后车门22,因此旋转致动器16的致动使第一支柱12与第二支柱14之间的线缆18张紧。在侧面碰撞期间,线缆18可以将来自侧面碰撞的力分配到第一支柱12和第二支柱14。将力分配到车辆10的支柱12、14在侧面碰撞期间为前车门20和后车门22提供了加强。另外,使用旋转致动器16来张紧线缆18可以满足车辆10内的封装约束,并且可以允许调整线缆18中的张力,如下所述。
33.参考图1,车辆10可以是任何类型的乘用或商用汽车,诸如轿车、卡车、运动型多功能车、跨界车、货车、小型货车、出租车、公共汽车等。例如,车辆10可以是自动驾驶车辆。换句话说,车辆10可自主地操作,使得车辆10可在无须驾驶员持续注意的情况下驾驶,即车辆10可在没有人类输入的情况下自行-驾驶。
34.车辆10限定例如在车辆10的前部和后部之间延伸的纵向轴线a1。车辆10限定例如在车辆10的左侧和右侧之间延伸的横向轴线a2。车辆10限定例如在车辆10的车顶和车底之间延伸的竖直轴线a3。纵向轴线a1、横向轴线a2和竖直轴线a3彼此垂直。
35.车辆10包括车架(未编号)和车身24。车架可以是一体式车身结构,其中车架与车身24(包括车架纵梁、支柱12、14、车顶纵梁等)成一体。作为另一个示例,车身24和车架可以具有框架车身结构(也称为驾驶室车架分离式结构),其中车身24和车架是单独的部件(即,模块化的),并且车身24被支撑在车架上并固定到车架。替代地,车架和车身24可以具有任何合适的结构。车架和车身24可以是任何合适的材料,例如,钢、铝和/或纤维增强塑料等。
36.车身24限定用于容纳车辆10的乘员(如果有的话)的乘客舱。乘客舱包括前端(未编号)和后端(未编号),其中在车辆10的向前移动期间,前端在后端前方。车辆10包括一个或多个座椅(未示出)。车辆10可以包括任何合适数量的座椅。座椅可以被布置在乘客舱中的任何合适的位置中,即,作为前排座椅、后排座椅、第三排座椅等。座椅可以相对于车底可移动到各个位置,例如,可前后移动和/或可横向于车辆移动。座椅可以是任何合适的类型,例如,斗式座椅。
37.如上所述,车辆10可以是无b柱的,如图1所示。具体地,车身24可以是无b柱的。在这样的示例中,车身24可以限定接收两个车门(例如,前车门20和后车门22)的一个车门开口。具体地,第一支柱12和第二支柱14设置在一个车门开口的相对侧。也就是说,第一支柱12和第二支柱14通过一个车门开口彼此间隔开。支柱12、14中的一个可以设置在乘客舱的前端,并且可以被称为“a柱”。另外,支柱12、14中的另一个可以设置在乘客舱的后端,并且可以被称为“c柱”。车身24可以不包括在第一支柱12和第二支柱14之间的支柱,即“b柱”。在图中所示的示例中,第一支柱12是a柱,并且第二支柱14是c柱。在替代性示例中,第一支柱12是c柱,并且第二支柱14是a柱。
38.替代地,车身24可以包括b柱,即,车身24可以限定两个车门开口,每个车门开口接收前车门20或后车门22中的一者。在这样的示例中,支柱12、14通过车门开口中的至少一个彼此间隔开。也就是说,支柱12、14中的一个是a柱或c柱中的一个。支柱12、14中的另一个是b柱或者a柱或c柱中的另一个。
39.前车门20可以铰接到车身24的a柱。例如,前车门20可以包括在前车门20的车辆前向端处的铰链(未示出),所述铰链将前车门20耦接到a柱。后车门22可以铰接到车身24的c柱。例如,后车门22可以包括在后车门22的车辆后向端处的铰链(未示出),所述铰链将后车
门22耦接到c柱。车门20、22在支柱12、14之间的位置处相遇,并且可以可释放地相互闩锁。
40.车身24可以包括沿着纵向轴线a1(即,从第一支柱12到第二支柱14)伸长的下边梁26。下边梁26是车辆10的一侧的最低部分。下边梁26在车辆10的一侧提供刚性。下边梁26支撑车辆10部件,诸如车底、车门20、22、支柱12、14等。下边梁26可以限定一个车门开口的下边界。
41.继续参考图1,每个车门20、22和下边梁26可以包括用于将相应的车门20、22闩锁到车身24的闩锁组件28。例如,闩锁组件28可以包括在下边梁26上的撞销和在车门20、22上的可释放地接合撞销的闩锁。在图1所示的示例中,具有无b柱配置的车辆10包括用于前车门20和后车门22两者的闩锁组件28。另外,车门20、22可以包括用于将车门20、22相互闩锁的闩锁组件28。例如,闩锁组件28可以包括在一个车门20、22上的撞销和在另一个车门20、22上的可释放地接合撞销的闩锁。
42.旋转致动器16由第一支柱12支撑。例如,旋转致动器16可以安装到第一支柱12。例如,旋转致动器16可以包括接合第一支柱12的定位元件、紧固件等。另外或替代地,紧固件可以接合旋转致动器16和第一支柱12以将旋转致动器16安装到第一支柱12。另外,旋转致动器16与线缆18接合。作为一个示例,旋转致动器16可以包括可围绕轴线(未示出)旋转的卷筒30,如图3a和图3b所示。线缆18的一端可以例如经由紧固件、焊接、粘合剂等连接到卷筒30。
43.旋转致动器16被配置为将线缆18从如图1、图2a、图4a和图5a所示的收起位置移动到如图2b、图4b和图5b所示的展开位置。也就是说,旋转致动器16可操作以沿着纵向轴线a1拉动线缆18。具体地,旋转致动器16被定位成使得卷筒30的旋转轴线大致平行于车辆10的横向轴线a2。在这种背景下,“大体上”意味着卷筒30的旋转轴线大体上沿着横向轴线a2延伸,即使所述轴线偏离平行线。响应于车辆预碰撞而致动旋转致动器16,如下所述。例如,旋转致动器16可以使卷筒30沿第一方向(例如,逆时针)旋转。当旋转致动器16使卷筒30沿第一方向旋转时,卷筒30沿第一方向拉动线缆18,并且线缆18缠绕在卷筒30上。
44.旋转致动器16可以被配置为使线缆18从展开位置移动到收起位置。也就是说,旋转致动器16可以被配置为释放所述线缆18中的张力。例如,响应于在检测到车辆预碰撞之后未检测到车辆侧面碰撞,可以致动旋转致动器16以释放线缆18中的张力,如下所述。例如,旋转致动器16可以使卷筒30沿第二方向(例如,顺时针)旋转。第二方向与第一方向相反。当旋转致动器16使卷筒30沿第二方向旋转时,线缆18从卷筒30上解除缠绕,并且线缆18中的张力被释放。在这种情况下,线缆18可以通过例如可移动带轮46(如下面关于图5a和图5b所讨论的)、车辆10的另一个部件或重力移动到收起位置。
45.旋转致动器16可以包括锁定元件32、34(见图3a和图3b),所述锁定元件可彼此接合以防止卷筒30沿第二方向(例如,逆时针方向)旋转并释放线缆18中的张力。当线缆18处于收起位置时,锁定元件32、34彼此脱离。在这种情况下,卷筒30可以围绕卷筒30的旋转轴线旋转。当线缆18处于展开位置时,锁定元件32、34互相接合,如图3a和图3b所示。在这种情况下,卷筒30相对于第一支柱12被锁定,即被固定。也就是说,当锁定元件32、34相互接合时,线缆18保持在展开位置。锁定元件32、34可以是可释放的,例如,以响应于在检测到车辆预碰撞之后未检测到车辆侧面碰撞而允许卷筒30沿第二方向旋转,如下所述。锁定元件32、34可以是棘爪32和棘轮34,如图3a和图3b所示,或者是任何其他合适的类型,诸如锁销和
孔。
46.旋转致动器16可以是,例如,点燃可燃材料的任何致动器。例如,旋转致动器16可以包括产生气体或在致动时迅速膨胀的烟火填料。也就是说,旋转致动器16可以被烟火致动。具体地,旋转致动器16可以包括气缸36和活塞38以及气缸36中的烟火填料,如图3b所示。活塞38连接到缠绕在卷筒30上的系绳40,并且烟火填料被点燃以使活塞38沿着气缸36滑动,即,使活塞38和系绳40相对于第一支柱12移动。响应于车辆预碰撞,进一步如下所述,旋转致动器16致动以移动活塞38,这拉动系绳40并使卷筒30围绕卷筒30的旋转轴线沿第一方向旋转。在这样的示例中,锁定元件32、34可以保持接合以防止卷筒30沿第二方向旋转。
47.替代地,旋转致动器16可以包括马达42,如图3a所示。马达42可以是电动马达。马达42可以是任何合适类型的电动马达,例如无刷dc马达、有刷dc马达、旋转磁性马达等。
48.马达42可以与卷筒30接合以使卷筒30围绕卷筒30的旋转轴线旋转。马达42可以以任何合适的方式与卷筒30接合。例如,马达42可以是摩擦驱动马达,所述摩擦驱动马达包括接触卷筒30以通过摩擦接触驱动卷筒30的轮。作为另一个示例,马达42可以包括与围绕卷筒30周向间隔开的齿轮齿接合的齿轮。马达42被配置为响应于车辆预碰撞而使卷筒30沿第一方向旋转,如下所述。
49.另外,马达42可以被配置为以响应于在检测到车辆预碰撞之后未检测到车辆侧面碰撞而使卷筒30沿第二方向旋转,如下所述。在这种情况下,锁定元件32、34可以是可选择性地释放的。具体地,锁定元件32、34可以在马达42被致动以使卷筒30沿第二方向旋转之前彼此释放。
50.车辆10可以包括设置在第二支柱14处的第二旋转致动器44,如图4a和图4b所示。第二旋转致动器44可以由第二支柱14支撑,例如,以与上文关于由第一支柱12支撑的旋转致动器16所讨论的方式基本上相同的方式。除了第二旋转致动器44被配置为沿与旋转致动器16相反的方向旋转之外,第二旋转致动器44可以与旋转致动器16基本上相同。也就是说,旋转致动器16和第二旋转致动器44可以是彼此关于横向轴线a2的镜像。
51.第二旋转致动器44可以被配置为例如以与上文关于旋转致动器16所讨论的方式基本上相同的方式在收起位置与展开位置之间移动线缆18。第二旋转致动器44可以与旋转致动器16同时致动,例如,响应于车辆预碰撞和/或在检测到车辆预碰撞之后未检测到车辆侧面碰撞。
52.在旋转致动器16被配置为释放线缆18中的张力的示例中,车辆10可以包括两个可移动带轮46,如图5a和图5b所示。每个可移动带轮46可以设置在一个相应的支柱12、14处。每个可移动带轮46可以由相应的支柱12、14支撑。例如,每个可移动带轮46可以包括安装到相应的支柱12、14的弹簧48。例如,弹簧48可以包括接合相应支柱12、14的定位元件、紧固件等。另外或替代地,紧固件可以接合相应的弹簧48和相应的支柱12、14以将相应的可移动带轮46安装到相应的支柱12、14。弹簧48可以是任何合适类型的弹簧。例如,如图5a和图5b所示,弹簧可以是扭转弹簧。其他合适的类型包括拉伸弹簧、压缩弹簧等。
53.可移动带轮46可以包括接收线缆18的凹槽(未示出)。可移动带轮46可以例如围绕大致平行于横向轴线a2的轴线(未示出)旋转。也就是说,可移动带轮46可以在第一方向和第二方向上旋转。在这样的示例中,每个可移动带轮46包括轴(未编号)和可旋转地支撑在轴上的轮(未编号)。
54.可移动带轮46被配置为当旋转致动器16释放线缆18中的张力时将该线缆18引导到收起位置。例如,弹簧48可以偏置可移动带轮46以保持与线缆18接触。也就是说,弹簧48可以在线缆18的方向上施加偏置力。在旋转致动器16沿第二方向致动期间,弹簧48的偏置力提供足够的力以将线缆18移动到收起位置。也就是说,当线缆18松弛(即,缺乏足够的张力来拉紧)时,弹簧48可以使可移动带轮46偏置以将线缆18引导到收起位置。当线缆18处于展开位置时,偏置力小于线缆18中的张力,这允许线缆18在展开期间将可移动带轮46移动到展开位置。
55.线缆18从第一支柱12延伸到第二支柱14。也就是说,线缆18延伸跨过前车门20和后车门22。线缆18包括与旋转致动器16接合(即,设置在第一支柱12处)的一端(未示出),和与所述一端间隔开(即,设置在第二支柱14处)的另一端(未编号)。线缆18的端部可以相对于竖直轴线a3大致彼此对齐。
56.在车辆10缺乏第二旋转致动器44的示例中,线缆18的另一端相对于第二支柱14固定。例如,线缆18的另一端可以经由紧固件、焊接、粘合剂等直接连接到第二支柱14,或经由一个或多个中间部件间接连接到第二支柱14,如图2a、图2b、图5a和图5b所示。在车辆10包括第二旋转致动器44的示例中,线缆18的另一端与第二旋转致动器44接合,如图4a和图4b所示。
57.线缆18被设计成(即,其尺寸和形状被设计成)在车辆侧面碰撞期间抵抗车门侵入。线缆18可以例如包括粘合、扭绕和/或编织在一起成螺旋形状的若干股线材。线缆18可以被设计成具有高的拉伸强度,以在支柱12、14之间传递重载荷。线缆18可具有任意合适的直径。线缆18可以由任何合适的材料(诸如金属等)制成。
58.线缆18可通过旋转致动器16从收起位置移动到展开位置。当旋转致动器16沿第一方向致动时,线缆18缠绕在旋转致动器16(例如,卷筒30)上。在这种情况下,旋转致动器16拉紧线缆18,即,消除线缆18中的松弛。也就是说,在旋转致动器16沿第一方向的致动期间,旋转致动器16将线缆18拉到展开位置。在其中线缆18包括第二旋转致动器44的一个示例中,线缆18可通过沿第一方向致动的旋转致动器16和沿第二方向致动的第二旋转致动器44从收起位置移动到展开位置,例如,以与上文刚刚讨论的基本上相同的方式。
59.线缆18可以从展开位置移动到收起位置。在其中旋转致动器16被配置为沿第二方向旋转的示例中,当旋转致动器16沿第二方向旋转时,线缆18从旋转致动器16(例如,卷筒30)展开。在这种情况下,旋转致动器16使线缆18松弛。也就是说,旋转致动器16在沿第二方向致动期间释放线缆18中的张力。在这样的示例中,可移动带轮46可以将线缆18引导到收起位置。在其中线缆18包括第二旋转致动器44的一个示例中,旋转致动器16配置为沿第二方向旋转,并且第二旋转致动器44被配置为沿第一方向旋转,线缆18可从展开位置移动到收起位置,例如,以与上文刚刚讨论的基本上相同的方式。
60.在收起位置,线缆18可以沿着车辆10的下边梁26布设,即,沿着一个车门开口的下边界布设,如图2a、图4a和图5a所示。线缆18可以例如被地毯、装饰板等隐藏。换句话说,处于收起位置的线缆18在车辆10的入口、出口和占用期间对于乘员可能是不可见的。在收起位置,线缆18中的张力相对于线缆18处于展开位置时的张力被松弛。例如,在收起位置,线缆18可以松弛,即,缺乏使其在支柱12、14之间拉紧的足够的张力。
61.在展开位置,线缆18延伸跨过一个车门开口并且与下边梁26间隔开,即,设置在一
个车门开口中。处于展开位置的线缆18沿着大致平行于纵向轴线a1的轴线a4延伸,如图2b、图4b和图5b所示。线缆18在展开位置处于张力下。例如,线缆18可以在支柱12、14之间的张力下拉紧。可以基于旋转致动器16(和第二旋转致动器44)的旋转次数来调整线缆18中的张力。例如,增加旋转致动器16(和第二旋转致动器44)的旋转次数会增加缠绕在旋转致动器16(和第二旋转致动器44)上的线缆18的量,从而增加线缆18中的张力。线缆18中的张力可以将例如在车辆侧面碰撞期间由物体施加的力分配到支柱12、14,这可以帮助降低车门侵入乘客舱的可能性。
62.车辆10可以包括设置在第一支柱12与第二支柱14之间的次级线缆50,如图2a、图2b和图4a至图5b所示。车辆10可以包括任意合适数量的例如一个或多个次级线缆50。次级线缆50可以设置在第一支柱12与第二支柱14之间的任何合适的位置处。在其中车辆10包括一根次级线缆50的一个示例中,次级线缆50可以与第一支柱12和第二支柱14等距。在其中车辆10包括多根次级线缆50的一个示例中,次级线缆50中的至少一根可以设置成比另一个支柱12、14更靠近一个支柱12、14。
63.次级线缆50被设计成(即,其尺寸和形状被设计成)加强线缆18。也就是说,次级线缆50在车辆侧面碰撞期间补充线缆18以对抗车门侵入。次级线缆50可以例如包括粘合、扭绕和/或编织在一起成螺旋形状的若干股线材。次级线缆50可以被设计成具有高拉伸强度,以将重载荷传递到车身24,例如下边梁26。次级线缆50可具有任意合适的直径。次级线缆50可以由任何合适的材料(诸如金属等)制成。
64.次级线缆50可以从下边梁26(或车身24的任何其他合适的部件,例如车底、横梁等)延伸到线缆18,如图2a、图2b和图4a至图5b所示。次级线缆50可以包括第一端52和与第一端52间隔开的第二端54。第一端52可以相对于下边梁26(或车身24的任何其他合适的部件)固定。例如,次级线缆50的第一端52可以经由紧固件、焊接、粘合剂等直接连接到下边梁26(或车身24的任何其他合适的部件),或经由一个或多个中间部件间接连接到下边梁26(或车身24的任何其他合适的部件)。
65.次级线缆50的第二端54可以与线缆18接合。例如,次级线缆50的第二端54可以包括环,并且线缆18可以延伸穿过所述环。作为另一个示例,次级线缆50的第二端54可以例如经由焊接连接到线缆18。
66.当线缆18处于展开位置,次级线缆50可以大致垂直于线缆18延伸。例如,当线缆18处于展开位置时,次级线缆50可以沿着大致平行于竖直轴线a3的轴线(未示出)延伸。次级线缆50可以在车辆侧面碰撞期间通过限制线缆18沿着横向轴线a2的移动来加强线缆18。在车辆侧面碰撞期间,由于来自物体碰撞车辆10的力,线缆18可以沿着横向轴线a2移动。在这种情况下,线缆18沿着横向轴线a2的移动可以使次级线缆50张紧。当次级线缆50处于张力下(即,在张力下拉紧)时,次级线缆50可以将载荷从线缆18传递到下边梁26,这可以帮助降低车门侵入乘客舱的可能性。
67.参考图6,车辆10可以包括控制系统56。控制系统56可以包括通过通信网络62通信的计算机58、碰撞检测传感器60和旋转致动器16(和第二旋转致动器44)。
68.碰撞检测传感器60可以与计算机58通信。碰撞检测传感器60可以是任何合适的类型,例如:接触后-传感器,诸如加速度计、压力传感器和接触开关;以及碰撞前-传感器,诸如雷达、激光雷达和视觉-感测系统。视觉系统可以包括一个或多个相机、ccd图像传感器、
cmos图像传感器等。碰撞检测传感器60可以设置于车辆10中。
69.碰撞检测传感器60被编程为检测车辆预碰撞。换句话说,碰撞检测传感器60可以被配置为在碰撞之前感测碰撞,即,预碰撞感测。当碰撞检测传感器60感测到发生车辆预碰撞时,计算机58可以从碰撞检测传感器60接收指示车辆预碰撞的一个或多个信号。另外,碰撞检测传感器60可以被编程为检测车辆10的碰撞。当发生车辆侧面碰撞时,计算机58可以从碰撞检测传感器60接收指示车辆侧面碰撞的一个或多个信号。
70.计算机58可以是经由电路、芯片或其他电子部件实现的基于微处理器-的计算装置。计算机58可以包括处理器、存储器等。计算机58的存储器可以存储可由处理器执行的指令,并且处理器可从存储器读取所述指令并且执行所述指令。
71.控制系统56可以通过通信网络62(诸如计算机局域网(can)总线、以太网、局域互连网(lin))和/或通过任何其他有线或无线通信网络来传输信号。
72.计算机58可以被编程为响应于检测到车辆预碰撞而在例如第一方向上激活旋转致动器16。例如,响应于从碰撞检测传感器60接收到信号,计算机58可以启动对旋转致动器16的致动。换句话说,在碰撞检测传感器60检测到车辆预碰撞的示例中,计算机58可以发送信号以致动旋转致动器16。在这种抢矿下,旋转致动器16致动,使得线缆18从收起位置移动到展开位置。
73.在其中车辆10包括第二旋转致动器44的一个示例中,计算机58可以被编程为响应于检测到车辆预碰撞,例如以与上文刚刚讨论的基本上相同的方式,例如沿第二方向激活第二旋转致动器44。在这种情况下,计算机58可以同时致动旋转致动器16和第二旋转致动器44。
74.在其中旋转致动器16被配置为释放线缆18中的张力的一个示例中,计算机58可以被编程为响应于在检测到车辆预碰撞之后未检测到车辆侧面碰撞而沿第二方向激活旋转致动器16。例如,在检测到车辆预碰撞时,计算机58可以启动计时器。计时器的持续时间可以存储在例如计算机58的存储器中。计时器的持续时间可以根据经验确定,例如基于允许确定在车辆侧面碰撞之前可以检测到预碰撞的最大时间量的测试。响应于在计时器到期之前未从碰撞检测传感器60接收到信号,计算机58可以确定没有发生车辆侧面碰撞。在这种情况下,计算机58可以发起旋转致动器16的致动。换句话说,在其中碰撞检测传感器60未检测到车辆侧面碰撞的示例中,计算机58可以发送信号以致动旋转致动器16。在这种情况下,旋转致动器16例如沿第二方向致动以释放线缆18中的张力。可移动带轮46可以引导线缆18从展开位置移动到收起位置。
75.在其中车辆10包括第二旋转致动器44且第二旋转致动器44配置为沿第一方向旋转的一个示例中,计算机58可以被编程为响应于在检测到车辆预碰撞之后未检测到车辆侧面碰撞,例如以与上文刚刚讨论的基本上相同的方式,沿第一方向激活第二旋转致动器44。在这种情况下,计算机58可以同时致动旋转致动器16和第二旋转致动器44。
76.诸如计算机58的计算装置通常包括计算机可执行指令,其中所述指令可以由诸如上面列出的那些的一个或多个计算装置执行。可从使用多种编程语言和/或技术创建的计算机程序编译或解译计算机可执行指令,所述编程语言和/或技术单独地或组合地包括但不限于限制java
tm
、c、c++、visual basic、java script、perl等。可在虚拟机上编译和执行这些应用中的一些应用,所述虚拟机例如是java虚拟机、dalvik虚拟机等。一般来说,处理
器(例如,微处理器)例如从存储器、计算机可读介质等接收指令,并且执行这些指令,从而执行一个或多个过程,包括本文描述的过程中的一者或多者。此类指令和其他数据可以使用多种计算机可读介质来存储和传输。
77.计算机可读介质(也称为处理器可读介质)包括参与提供可以由计算机(例如,由计算机的处理器)读取的数据(例如,指令)的任何非暂时性(例如,有形)介质。此类介质可采取许多形式,包括但不限于非易失性介质和易失性介质。指令可以通过一种或多种传输介质传输,包括光纤、电线、无线通信,包括包含耦接到计算机处理器的系统总线的内部构件。常见形式的计算机可读介质包括例如ram、prom、eprom、flash-eeprom、任何其他存储器芯片或盒式磁带、或计算机可从中读取的任何其他介质。
78.在一些示例中,系统元件可被实施为一个或多个计算装置(例如,服务器、个人计算机等)上、存储在与其相关联的计算机可读介质(例如,磁盘、存储器等)上的计算机可读指令(例如,软件)。计算机程序产品可以包括存储在计算机可读介质上的用于执行本文所述的功能的此类指令。
79.在车辆侧面碰撞期间,物体可能撞击车辆10的车门20、22,并且致使车门20、22沿着横向轴线a2向内(即,朝向乘客舱)移动。响应于检测到车辆预碰撞,致动旋转致动器16以将线缆18移动到展开位置。由于线缆18在车辆侧面碰撞之前处于展开位置(即,在张力下),因此线缆18将来自碰撞的力分配给第一支柱12和第二支柱14。具体地,在车辆侧面碰撞期间,线缆18保持附接到第一支柱12和第二支柱14。线缆18的张力导致线缆18抵抗物体朝向乘客舱的移动,以降低在车辆侧面碰撞期间车门侵入的可能性。
80.已经以说明性方式描述了本公开,并且应理解,已经使用的术语意图具有描述性词语而非限制性词语的性质。形容词“第一”、“第二”等仅用作标识符,并且不用于指示次序或重要性。鉴于以上教导,本公开的许多修改和变化是可能的,并且本公开可以以不同于具体描述的其他方式来实践。
81.根据本发明,提供了一种车辆,所述车辆具有:第一支柱和沿着车辆纵向轴线与所述第一支柱间隔开的第二支柱;旋转致动器,所述旋转致动器设置在所述第一支柱处,所述旋转致动器相对于所述第一支柱固定;以及线缆,所述线缆与所述旋转致动器接合并且沿着所述车辆纵向轴线伸长到所述第二支柱,所述线缆能够通过所述旋转致动器移动到展开位置并且在所述展开位置处于张力下。
82.根据一个实施例,本发明还特征在于第二旋转致动器,所述第二旋转致动器设置在所述第二支柱处并且相对于所述第二支柱固定,其中所述线缆与所述第二旋转致动器接合。
83.根据一个实施例,所述旋转致动器和所述第二旋转致动器各自包括电动马达。
84.根据一个实施例,所述旋转致动器和所述第二旋转致动器各自包括烟火填料。
85.根据一个实施例,本发明还特征在于传感器和与所述传感器通信的计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以基于所述传感器检测到预碰撞来控制所述旋转致动器和所述第二旋转致动器的致动。
86.根据一个实施例,所述指令还包括用于基于所述传感器未检测到碰撞来控制所述旋转致动器和所述第二旋转致动器的致动的指令。
87.根据一个实施例,所述线缆包括设置在所述第二支柱处的端部,所述端部相对于
所述第二支柱固定。
88.根据一个实施例,本发明还特征在于从所述第一支柱延伸到所述第二支柱的下边梁,以及从所述下边梁延伸到所述线缆的次级线缆。
89.根据一个实施例,所述次级线缆可以包括相对于所述下边梁固定的第一端和与所述线缆接合的第二端。
90.根据一个实施例,所述次级线缆与所述第一支柱和所述第二支柱等距地设置。
91.根据一个实施例,当所述线缆处于展开位置时,所述次级线缆大致垂直于所述线缆延伸。
92.根据一个实施例,所述旋转致动器被配置为释放所述线缆中的张力。
93.根据一个实施例,本发明还特征在于各自与所述线缆耦接的两个可移动带轮,每个可移动带轮设置在一个相应的支柱处并且被配置为当所述旋转致动器释放所述线缆中的张力时将所述线缆引导至收起位置。
94.根据一个实施例,每个可移动带轮包括安装到相应支柱的弹簧,所述弹簧被配置为使所述可移动带轮朝向所述收起位置偏置。
95.根据一个实施例,当所述线缆处于收起位置时,所述线缆中的张力可以相对于所述线缆处于展开位置时的张力被松弛。
96.根据一个实施例,本发明还特征在于传感器和与所述传感器通信的计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以基于所述传感器检测到预碰撞来控制所述旋转致动器的致动。
97.根据一个实施例,所述指令还包括用于基于所述传感器未检测到碰撞来控制所述旋转致动器的致动的指令。
98.根据一个实施例,处于展开位置的所述线缆沿着大致平行于车辆纵向轴线的轴线延伸。
99.根据一个实施例,所述旋转致动器包括电动马达。根据一个实施例,所述旋转致动器包括烟火填料。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1