一种多翼腿式水陆两栖机器人机构
1.本发明属于水陆两栖机器人技术领域,具体涉及一种多翼腿式水陆两栖机器人机构。
背景技术:
2.随着科技的发展,海洋资源勘探、石油管道泄漏检测、海岸勘探、水生生物观测、国防、军事侦查等领域对水陆两栖机器人的复杂环境适应能力、体积大小都提出了更高的要求。轮式机器人具有高速高效的特点,技术成熟,但其越障能力差,不能适应复杂地形环境。腿式机器人机动性好、越障能力强,但是自主控制复杂。水中生物中,水母、章鱼等多足生物游泳时稳定性较好。针对以上问题,结合轮式高速、腿式越障能力强、多足结构水中运动平稳的特点,设计一款体积较小的功能复合型水陆两栖机器人具有重要意义。
技术实现要素:
3.本发明要解决的问题是提供一种多翼腿式水陆两栖机器人机构,环境适应能力强,体积小,水中运动平稳。
4.本发明解决其技术问题采用的技术方案是:
5.一种多翼腿式水陆两栖机器人机构,该机器人包括:头部转向模块,上部翼腿运动模块,中间运动模块,下部翼腿运动模块。
6.头部转向模块通过螺栓与上部翼腿运动模块的头部法兰盘固定连接;上部翼腿运动模块通过螺栓与中间运动模块的法兰盘固定连接;中间运动模块另一端的法兰盘通过螺栓与下部翼腿运动模块固定连接。
7.头部转向模块由头部外壳,螺旋桨防水电机,头部盖子组成。螺旋桨防水电机放于头部外壳中,因为头部外壳里面的凹槽形状和螺旋桨防水电机的外壳形状一样,所以可以很好的固定住螺旋桨防水电机,头部盖子与头部外壳通过螺丝连接。
8.上部翼腿运动模块由头部法兰盘,密封圈,上部外壳端盖,头部转向电机固定板,头部转向电机,上部翼腿驱动环,丝杠螺母,丝杠电机固定板,丝杠电机,上部外壳,八个上部翼腿组成。丝杠电机通过丝杠电机固定板固定连接在上部外壳内部的底端,丝杆螺母与上部翼腿驱动环固定连接,上部翼腿驱动环的外部圆环与八个上部翼腿的开口滑槽滑动配合,八个上部翼腿的一端通过活动连接轴等距连接在上部外壳上,运动时,丝杠电机正反转动,带动丝杠螺母上下移动,因为丝杆螺母与上部翼腿驱动环固定连接,所以上部翼腿驱动环也可以上下移动,从而带动八个上部翼腿上下摆动,上部外壳的另一端开设有与上部翼腿数量相同的凹槽,上部翼腿的活动端运动到此处,可以进入凹槽,凹槽可以限制上部翼腿向两侧摆动,从而增大上部翼腿的稳定性。头部转向电机通过头部转向电机固定板固定连接在上部外壳内部靠近开口处,上部外壳端盖与上部外壳固定连接,头部转向电机的电机轴两侧磨平、顶端开有螺纹孔,穿过上部外壳端盖的中心孔与头部法兰盘上开有异型孔的轴通过型面配合,并用螺丝固定连接,头部法兰盘开有异型孔的轴的外圈与上部外壳端盖
的中心孔的内圈之间通过密封圈进行防水。
9.上部翼腿由腿架,两个左侧腿翼,两个右侧腿翼组成。八个上部翼腿完全相同,左侧腿翼和右侧腿翼均通过活动连接轴与腿架连接,腿架每侧的两个腿翼平行交错布置,可以增大腿翼与水的接触面积,从而提高驱动力。每个腿翼都设有挡块,限制其只能在一定范围内自由摆动,机器人在水里游泳过程中,上部翼腿向上摆动时,在水的阻力下,腿翼向下闭合,与水的接触面积小,水产生的阻力小,由于腿翼下面有凸起,所以不会与腿架完全重合,方便腿翼张开;上部翼腿向下摆动时,在水的阻力下,腿翼又会张开,但是腿翼与腿架的最大夹角不会超过事先设计好的最大值,最大夹角时腿翼与水的接触面积最大,此时水的阻力最大,而且此时水的阻力是机器人前进的动力,所以上部翼腿向下摆动时产生的推动力大于上部翼腿向上摆动时水的阻力,机器人会产生前进的动力。
10.中间运动模块由两个法兰盘,两个密封圈,四个裙壳,两个端盖,两个滑环,两个转动电机延长轴,两个转动电机固定板,两个转动电机,中间外壳组成。转动电机通过电机固定板固定连接到中间外壳内部靠近一端的开口处,滑环固定连接到转动电机固定板上,端盖固定连接在中间外壳上,转动电机的电机轴穿过滑环的中心孔通过型面与转动电机延长轴的孔配合,转动电机延长轴另一端的轴通过型面与法兰盘的异型孔轴的孔配合,滑环的内圈通过顶丝与法兰盘的异型孔轴的外圈连接,密封圈的外圈与法兰盘的外壳配合,密封圈的内圈与端盖的空心筒外圈配合。两个裙壳可以组合成一个完整的圆筒,每个法兰盘的外壳上固定连接两个裙壳,其作用是使机器人整体外壳呈流线型,减小水的阻力。中间运动模块中,上下两端的零件完全相同,对称分布。
11.下部翼腿运动模块由八个下部翼腿,下部外壳,丝杠电机,丝杠电机固定板,丝杠螺母,下部翼腿驱动环,下部外壳端盖组成。丝杠电机通过丝杠电机固定板固定连接在下部外壳内部的底端,丝杆螺母与下部翼腿驱动环固定连接,下部翼腿驱动环的外部圆环与八个下部翼腿的开口滑槽滑动配合,八个下部翼腿的一端通过活动连接轴等距连接在下部外壳上,下部外壳端盖固定连接在下部外壳上,运动时,丝杠电机正反转动,带动丝杠螺母上下移动,因为丝杆螺母与下部翼腿驱动环固定连接,所以下部翼腿驱动环也可以上下移动,从而带动八个下部翼腿上下摆动,下部外壳端盖的一端开设有与下部翼腿数量相同的凹槽,下部翼腿的活动端运动到此处,可以进入凹槽,凹槽可以限制下部翼腿向两侧摆动,从而增大下部翼腿的稳定性。
12.下部翼腿由腿架,两个左侧腿翼,两个右侧腿翼组成。八个下部翼腿完全相同,左侧腿翼和右侧腿翼均通过活动连接轴与腿架连接,腿架每侧的两个腿翼平行交错布置,可以增大腿翼与水的接触面积,从而提高驱动力。每个腿翼都设有挡块,限制其只能在一定范围内自由摆动,机器人在水里游泳过程中,下部翼腿向上摆动时,在水的阻力下,腿翼向下闭合,与水的接触面积小,水产生的阻力小,由于腿翼下面有凸起,所以不会与腿架完全重合,方便腿翼张开;下部翼腿向下摆动时,在水的阻力下,腿翼又会张开,但是腿翼与腿架的最大夹角不会超过事先设计好的最大值,最大夹角时腿翼与水的接触面积最大,此时水的阻力最大,而且此时水的阻力是机器人前进的动力,所以下部翼腿向下摆动时产生的推动力大于其向上摆动时水的阻力,机器人会产生前进的动力。
13.本发明所具有的有益效果:
14.1.本发明的水陆两栖机器人在陆地运动时,可以通过调整翼腿的张角,调整越障
能力,翼腿的张角大,越障能力强,张角很小时,翼腿的活动端进入凹槽,翼腿的稳定性更高,支持更大的运动速度。
15.2.本发明的水陆两栖机器人在水中运动时,既可以在水中游泳,也可以在水底行驶。
16.3.本发明的水陆两栖机器人在水中游泳时,采用上下两组翼腿摆动提供前进的动力,上部翼腿运动模块的八个翼腿和下部翼腿运动模块的八个翼腿独立控制,两组翼腿同时摆动时,机器人前进的动力更大,也可以只用其中一组翼腿摆动提供动力,另一组翼腿可以去执行其它任务,如果其中一组翼腿出现故障,另一组翼腿工作,也可以实现游泳功能,提高了机器人的容错能力。
17.4.本发明的水陆两栖机器人水中游泳时,可以通过调整翼腿摆动幅度的大小和摆动的频率实现在水中任意高度附近悬停的功能。
18.5.本发明的水陆两栖机器人水中游泳时,通过头部转向模块的螺旋桨转动,提供转向的动力,头部转向模块可以自由转动,机器人游泳时,可以实现任意方向的转弯。
19.6.本发明的水陆两栖机器人下部翼腿运动模块的八个翼腿可以作为抓手去抓取物品。
20.7.本发明的水陆两栖机器人采用模块化设计,各运动模块独立控制,协调配合,实现不同的运动形态,同时便于零件的维护和更换。
附图说明
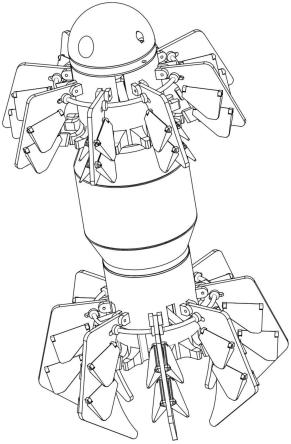
21.图1为一种多翼腿式水陆两栖机器人机构结构示意图;
22.图2为头部转向模块结构示意图;
23.图3为上部翼腿运动模块结构示意图;
24.图4为中间运动模块结构示意图;
25.图5为下部翼腿运动模块结构示意图;
26.图6为上部翼腿运动模块中的上部翼腿结构示意图;
27.图7为下部翼腿运动模块中的下部翼腿结构示意图;
28.图8为一种多翼腿式水陆两栖机器人机构斜向结构示意图;
29.图中:1、头部转向模块;2、上部翼腿运动模块;3、中间运动模块;4、下部翼腿运动模块;1-1、头部外壳;1-2、螺旋桨防水电机;1-3、头部盖子;2-1、头部法兰盘;2-2、密封圈;2-3、上部外壳端盖;2-4、头部转向电机固定板;2-5、头部转向电机;2-6、上部翼腿驱动环;2-7、丝杠螺母;2-8、丝杠电机固定板;2-9、丝杠电机;2-10、上部外壳;2-11、上部翼腿;3-1、法兰盘;3-2、密封圈;3-3、裙壳;3-4、端盖;3-5、滑环;3-6、转动电机延长轴;3-7、转动电机固定板;3-8、转动电机;3-9、中间外壳;4-1、下部翼腿;4-2、下部外壳;4-3、丝杠电机;4-4、丝杠电机固定板;4-5、丝杠螺母;4-6、下部翼腿驱动环;4-7、下部外壳端盖;2-11-1、腿架;2-11-2、左侧腿翼;2-11-3、右侧腿翼;4-1-1、腿架;4-1-2、左侧腿翼;4-1-3、右侧腿翼。
具体实施方式
30.结合附图对本发明作进一步说明。
31.如图1所示,本发明的多翼腿式水陆两栖机器人机构包括:头部转向模块1,上部翼
腿运动模块2,中间运动模块3,下部翼腿运动模块4。其头部转向模块1通过螺栓与上部翼腿运动模块2的头部法兰盘2-1固定连接;上部翼腿运动模块2通过螺栓与中间运动模块3的法兰盘3-1固定连接;中间运动模块3另一端的法兰盘3-1通过螺栓与下部翼腿运动模块4固定连接。
32.如图2所示,头部转向模块1由头部外壳1-1,螺旋桨防水电机1-2,头部盖子1-3组成。螺旋桨防水电机1-2放于头部外壳1-1中,因为头部外壳里面的凹槽形状和螺旋桨防水电机1-2的外壳形状一样,所以可以很好的固定住螺旋桨防水电机1-2,头部盖子1-3与头部外壳1-1通过螺丝连接。
33.如图3所示,上部翼腿运动模块2由头部法兰盘2-1,密封圈2-2,上部外壳端盖2-3,头部转向电机固定板2-4,头部转向电机2-5,上部翼腿驱动环2-6,丝杠螺母2-7,丝杠电机固定板2-8,丝杠电机2-9,上部外壳2-10,八个上部翼腿2-11组成。丝杠电机2-9通过丝杠电机固定板2-8固定连接在上部外壳2-10内部的底端,丝杆螺母2-7与上部翼腿驱动环2-6固定连接,上部翼腿驱动环2-6的外部圆环与八个上部翼腿2-11的开口滑槽滑动配合,八个上部翼腿2-11的一端通过活动连接轴等距连接在上部外壳2-10上,运动时,丝杠电机2-9正反转动,带动丝杠螺母2-7上下移动,因为丝杆螺母2-7与上部翼腿驱动环2-6固定连接,所以上部翼腿驱动环2-6也可以上下移动,从而带动八个上部翼腿2-11上下摆动,上部外壳2-10的另一端开设有与上部翼腿2-11数量相同的凹槽,上部翼腿2-11的活动端运动到此处,可以进入凹槽,凹槽可以限制上部翼腿2-11向两侧摆动,从而增大上部翼腿2-11的稳定性。头部转向电机2-5通过头部转向电机固定板2-4固定连接在上部外壳2-10内部靠近开口处,上部外壳端盖2-3与上部外壳2-10固定连接,头部转向电机2-5的电机轴两侧磨平、顶端开有螺纹孔,穿过上部外壳端盖2-3的中心孔与头部法兰盘2-1上开有异型孔的轴通过型面配合,并用螺丝固定连接,头部法兰盘2-1开有异型孔的轴的外圈与上部外壳端盖2-3的中心孔的内圈之间通过密封圈2-2进行防水。
34.如图6所示,上部翼腿2-11由腿架2-11-1,两个左侧腿翼2-11-2,两个右侧腿翼2-11-3组成。八个上部翼腿2-11完全相同,左侧腿翼2-11-2和右侧腿翼2-11-3均通过活动连接轴与腿架2-11-1连接,腿架2-11-1每侧的两个腿翼平行交错布置,可以增大腿翼与水的接触面积,从而提高驱动力。每个腿翼都设有挡块,限制其只能在一定范围内自由摆动,机器人在水里游泳过程中,上部翼腿2-11向上摆动时,在水的阻力下,腿翼向下闭合,与水的接触面积小,水产生的阻力小,由于腿翼下面有凸起,所以不会与腿架2-11-1完全重合,方便腿翼张开;上部翼腿2-11向下摆动时,在水的阻力下,腿翼又会张开,但是腿翼与腿架2-11-1的最大夹角不会超过事先设计好的最大值,最大夹角时腿翼与水的接触面积最大,此时水的阻力最大,而且此时水的阻力是机器人前进的动力,所以上部翼腿2-11向下摆动时产生的推动力大于上部翼腿2-11向上摆动时水的阻力,机器人会产生前进的动力。
35.如图4所示,中间运动模块3由两个法兰盘3-1,两个密封圈3-2,四个裙壳3-3,两个端盖3-4,两个滑环3-5,两个转动电机延长轴3-6,两个转动电机固定板3-7,两个转动电机3-8,中间外壳3-9组成。转动电机3-8通过电机固定板3-7固定连接到中间外壳3-9内部靠近一端的开口处,滑环3-5固定连接到转动电机固定板3-7上,端盖3-4固定连接在中间外壳3-9上,转动电机3-8的电机轴穿过滑环3-5的中心孔通过型面与转动电机延长轴3-6的孔配合,转动电机延长轴3-6另一端的轴通过型面与法兰盘3-1的异型孔轴的孔配合,滑环3-5的
内圈通过顶丝与法兰盘3-1的异型孔轴的外圈连接,密封圈3-2的外圈与法兰盘3-1的外壳配合,密封圈3-2的内圈与端盖3-4的空心筒外圈配合。两个裙壳3-3可以组合成一个完整的圆筒,每个法兰盘3-1的外壳上固定连接两个裙壳3-3,其作用是使机器人整体外壳呈流线型,减小水的阻力。中间运动模块3中,上下两端的零件完全相同,对称分布。
36.如图5所示,下部翼腿运动模块4由八个下部翼腿4-1,下部外壳4-2,丝杠电机4-3,丝杠电机固定板4-4,丝杠螺母4-5,下部翼腿驱动环4-6,下部外壳端盖4-7组成。丝杠电机4-3通过丝杠电机固定板4-4固定连接在下部外壳4-2内部的底端,丝杆螺母4-5与下部翼腿驱动环4-6固定连接,下部翼腿驱动环4-6的外部圆环与八个下部翼腿4-1的开口滑槽滑动配合,八个下部翼腿4-1的一端通过活动连接轴等距连接在下部外壳4-2上,下部外壳端盖4-7固定连接在下部外壳4-2上,运动时,丝杠电机4-3正反转动,带动丝杠螺母4-5上下移动,因为丝杆螺母4-5与下部翼腿驱动环4-6固定连接,所以下部翼腿驱动环4-6也可以上下移动,从而带动八个下部翼腿4-1上下摆动,下部外壳端盖4-7的一端开设有与下部翼腿4-1数量相同的凹槽,下部翼腿4-1的活动端运动到此处,可以进入凹槽,凹槽可以限制下部翼腿4-1向两侧摆动,从而增大下部翼腿4-1的稳定性。
37.如图7所示,下部翼腿4-1由腿架4-1-1,两个左侧腿翼4-1-2,两个右侧腿翼4-1-3组成。八个下部翼腿4-1完全相同,左侧腿翼4-1-2和右侧腿翼4-1-3均通过活动连接轴与腿架4-1-1连接,腿架4-1-1每侧的两个腿翼平行交错布置,可以增大腿翼与水的接触面积,从而提高驱动力。每个腿翼都设有挡块,限制其只能在一定范围内自由摆动,机器人在水里游泳过程中,下部翼腿4-1向上摆动时,在水的阻力下,腿翼向下闭合,与水的接触面积小,水产生的阻力小,由于腿翼下面有凸起,所以不会与腿架4-1-1完全重合,方便腿翼张开;下部翼腿4-1向下摆动时,在水的阻力下,腿翼又会张开,但是腿翼与腿架4-1-1的最大夹角不会超过事先设计好的最大值,最大夹角时腿翼与水的接触面积最大,此时水的阻力最大,而且此时水的阻力是机器人前进的动力,所以下部翼腿4-1向下摆动时产生的推动力大于其向上摆动时水的阻力,机器人会产生前进的动力。
38.本发明的工作原理为:
39.本发明的水陆两栖机器人可以实现陆地运动和水中运动两种运动模式。
40.陆地运动模式:在陆地上运动时,上部翼腿运动模块2和下部翼腿运动模块4可以作为两个轮子在中间运动模块3中的两个转动电机3-8的分别带动下进行滚动,两个轮子的大小可以进行调节,当遇到障碍时,调整翼腿的张角,张角变大,轮子变大,此时越障能力变强,在平整路面运动时,可以调小翼腿的张角,使翼腿的活动端进入凹槽,此时翼腿的稳定性较好,适合更大速度的运动。当需要转向时,既可以通过两侧轮子的差速进行转向,也可以通过调整两侧轮子大小的不一致进行转向。需要左转时只需提升右侧轮子的转速或者通过调整腿翼的张角,使右侧的轮子大于左侧的轮子,此时机器人向左转弯,反之相反。
41.水中运动模式:本发明的水陆两栖机器人既可以在水中游泳也可以在水底行驶。在水中游泳时,丝杠电机带动翼腿驱动环上下移动,翼腿驱动环带动翼腿上下摆动,翼腿向上摆动时,在水的阻力下,腿翼向下闭合,与水的接触面积小,水产生的阻力小,由于腿翼下面有凸起,所以不会与腿架完全重合,方便之后腿翼的张开;翼腿向下摆动时,在水的阻力下,腿翼又会张开,但是腿翼与腿架的最大夹角不会超过事先设计好的最大值,最大夹角时腿翼与水的接触面积最大,此时水的阻力最大,而且此时水的阻力是机器人前进的动力,翼
腿向下摆动时产生的推动力大于翼腿向上摆动时水的阻力,所以机器人会产生前进的动力。本发明的水陆两栖机器人采用上下两组翼腿摆动提供前进的动力,上部翼腿运动模块2的八个上部翼腿2-11和下部翼腿运动模块4的八个下部翼腿4-1独立控制,两组翼腿同时摆动时,机器人前进的动力更大,也可以只用其中一组翼腿摆动提供动力,另一组翼腿可以去执行其它任务,如果其中一组翼腿出现故障,另一组翼腿工作,也可以实现游泳功能,提高了机器人的容错能力。下部翼腿运动模块4的八个下部翼腿4-1还可以作为抓手去抓取物品。本发明的水陆两栖机器人还可以通过调整翼腿摆动幅度的大小和摆动的频率实现在水中任意高度附近悬停的功能。游泳过程中需要转向时,通过头部转向模块1的螺旋桨转动,提供转向的动力,头部转向模块1可以自由转动,可以使机器人实现任意方向的转弯。本发明的水陆两栖机器人在水底行驶运动时,与其在陆地上运动时的原理相同。
42.本发明的水陆两栖机器人具有陆地行驶、越障能力可调、水中游泳、水中悬停、水底行驶、抓取物品等多种功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1