用于车辆舱室的监测系统的制作方法
1.本公开涉及用于车辆舱室的监测系统、包括这种监测系统的车辆以及用于监测车辆舱室的方法。
背景技术:
2.有多种检测系统,出于安全原因,这些检测系统在车辆内的特定位置监测乘员的存在或乘员的特性。为了这个目的,监测系统应用各种技术,诸如成像传感器、重量传感器、热传感器等。基于监测系统的输出,可以限制子系统的操作,例如座椅调节、安全气囊展开和/或窗户打开。然而,传统的检测系统通常被配置为单独控制指定的子系统。
技术实现要素:
3.因此,可能需要为车辆舱室提供改进的监测系统,该监测系统可以连接到不同的传感器,以允许对车辆舱室中的子系统进行集成监测和控制。
4.本公开的独立权利要求的主题至少部分解决或缓解了该问题,其中另外的实施例合并在从属权利要求中。应当注意,以下描述的本公开的各方面适用于用于车辆舱室的监测系统、包括这样的监测系统的车辆以及用于监测车辆舱室的方法。
5.根据本公开,呈现了一种用于车辆舱室的监测系统。该监测系统包括第一传感器单元、第二传感器单元和控制单元。第一传感器单元被配置为生成车辆舱室的图像数据。第二传感器单元被配置为生成车辆舱室的非图像数据。控制单元被配置为收集图像数据和非图像数据,并基于此确定车辆舱室中是否有障碍物。控制单元还被配置为如果障碍物对子系统的致动具有破坏性,则限制子系统的致动。
6.根据本公开的监测系统可以基于乘员和/或对象的位置,提供舱室配置的集成控制和致动。通过一起处理图像数据和非图像数据,监测系统确保了操作车辆舱室中的子系统的更高的准确性、可靠性和可用性,并且避免了车辆舱室中的子系统对乘员和/或对象的潜在撞击、挤压和夹住。
7.在车辆舱室中,可以布置至少两个传感器单元,以监测车辆舱室的内部环境和内部配置。第一传感器单元和第二传感器单元可以捕获不同种类的传感器数据,以收集车辆舱室的可靠信息。第一传感器单元和第二传感器单元可以生成时间同步的数据,使得车辆舱室的实时监测是可用的。第一传感器单元可以包括一个或多个光学/视觉传感器,并通过捕获车辆舱室的图像来收集数据。第一传感器单元可以被配置为提供车辆舱室的空间信息。然而,捕获的图像的质量可能受到天气条件、在光线稀疏区域和夜间增加的传感器噪声的影响。此外,这种二维图像可能不提供子系统和障碍物之间的距离信息。
8.第二传感器单元可以通过应用至少一个非图像传感器(诸如微波辐射计、磁传感器、重力计、雷达和/或激光雷达)来补充此类缺陷并产生非图像数据。非成像传感器可以测量从感测目标接收的辐射。因此,第二传感器单元可以不受环境条件影响,并且即使在图像由第一传感器单元捕获的稀疏区域中也捕获可靠的数据。通过一起利用第一传感器单元和
第二传感器单元,可以提供精确的空间和动态数据,并且可以增强对车辆舱室中的障碍物的检测。因此,控制单元可以执行准确的决定。
9.控制单元可以是电子控制单元。控制单元可以基于从第一传感器单元和第二传感器单元接收到的数据来决定车辆舱室中是否存在障碍物。障碍物可以是由第一传感器单元和第二传感器单元中的至少一个检测到的一个或多个乘员和/或对象。控制单元可以基于障碍物的信息(诸如位置、尺寸等)来识别障碍物是否阻碍了布置在车辆舱室内的一个或多个子系统的操作。
10.此外,如果障碍物被认为对致动子系统有危险,控制单元可以禁用或限制至少一个子系统的致动。如果控制单元基于收集到的数据确定通过致动或移动特定的子系统,障碍物可能被夹住、撞击和/或挤压,则控制单元可以允许子系统仅在有限的范围内执行,或者甚至拒绝子系统的致动以保护障碍物。
11.因此,监测系统可以通过整体监测和控制车辆舱室的实时情况来允许车辆舱室中子系统的准确和安全操作。
12.在实施例中,第一传感器单元包括至少一个光学图像传感器。第一传感器单元可以被配置为捕获车辆舱室中的图像数据。光学图像传感器可以是具有用于将光子转换成电信号的电荷耦合器件(ccd)或有源像素传感器(cmos)的相机。相机可以包括宽视场镜头(诸如鱼眼镜头)以获取车辆舱室的整个区域的图像数据,并检测车辆舱室中的视觉障碍。
13.在实施例中,子系统为天窗系统、窗户系统、座椅调节系统、头枕系统、门系统和/或安全气囊系统。监测系统可以被配置为整体控制布置在车辆舱室中的子系统。子系统可以由乘员直接电动操作。因此,允许子系统的安全操作以避免撞击、挤压和夹住乘员和/或对象是重要的。
14.因此,监测系统可以基于由第一传感器单元和第二传感器单元生成的数据来验证和控制子系统。例如,如果第一传感器单元和第二传感器单元检测到车辆中被占用的座椅,则控制单元可以拒绝收回布置在被占用的座椅前面的头枕,以避免头枕与乘员的碰撞。如果过大的对象位于天窗系统下方的座椅系统上,监测系统也可以限制天窗系统的致动。如果儿童汽车座椅安装在座椅系统上,监测系统可以禁用或调整安全气囊系统的展开。如果儿童占用在座椅系统上,监测系统还可以限制窗户系统或门系统的打开或关闭。
15.在实施例中,第二传感器单元被配置为检测来自车辆舱室内的障碍物的反射信号。包括至少一个非图像传感器的第二传感器单元可以被配置为向障碍物发射可以被反射的能量源,并接收反射信号以获得关于障碍物的位置和/或速度的信息。
16.在实施例中,第二传感器单元可以包括雷达系统。来自雷达系统的数据可以由与一个或多个反光特征对应的车辆舱室的一个或多个区域的扫描产生。来自雷达系统发送器的无线电波(脉冲或连续)可以被对象反射并返回到接收器,从而提供关于对象的位置和速度的信息。具体地,雷达系统可以通过应用电磁来计算对象的距离和位置并检测广阔区域,因此同时检测一个以上的对象,来提供对象或乘员的确切位置。此外,第二传感器单元可以不受诸如天气、白天等环境条件的影响。因此,第二传感器单元可以补充由第一传感器单元生成的图像数据,以允许控制单元收集更可靠的数据。
17.在实施例中,第一传感器单元布置在车辆的纵向方向上,和/或第二传感器单元布置为垂直于车辆的纵向方向。纵向方向可以是车辆的驾驶方向或反向驾驶方向。第一传感
器单元可以安装在例如车辆舱室中的后视镜处,以获得车辆舱室的最宽视角。替代地,第一传感器单元可以在车辆舱室内部的方向上布置在车辆的后挡板处。本公开的指定传感器的位置是针对一个特定应用提出的,但是其他位置也可以用于传感器,只要它们基于传感器的规格、扫描模式和视场使能足够的检测数据。因此,传感器可以取决于技术能力和考虑车辆设计的需要而不同地布置。
18.为了补充第一传感器单元捕获的图像数据,第二传感器单元可以布置在车辆的横向方向上,该横向方向可以垂直于车辆的驾驶方向。优选地,第二传感器单元可以包括多个非图像传感器,以基本上检测车辆舱室的整个内部,诸如前座和后座之间的空间和/或后门区域。多个非图像传感器可以布置在车顶上。附加地或替代地,多个非图像传感器可以布置在a柱、b柱和/或c柱处。因此,控制单元可以接收关于车辆舱室当前情况的真实信息。
19.在实施例中,监测系统还包括第三传感器单元,其包括一个或多个子系统传感器。第三传感器单元被配置为向控制单元发送子系统的操作数据。除了由第一传感器单元收集的图像数据和由第二传感器单元收集的非图像数据之外,来自子系统的另外的传感器数据可以在控制单元中被发送和处理,以提供子系统的更可靠和安全的致动。
20.在实施例中,控制单元被配置为融合从第一传感器单元、第二传感器单元和/或第三传感器单元收集的数据,并确定障碍物的位置。控制单元可以合并来自第一传感器单元的二维图像数据和来自第二传感器单元的动态非图像数据,以创建3d点图。3d点图,换句话说3d点云,可以提供车辆舱室的准确空间信息。
21.在实施例中,从第一传感器单元、第二传感器单元和/或第三传感器单元收集的数据是原始数据。在实施例中,从第一传感器单元、第二传感器单元和/或第三传感器单元收集的数据是特征提取数据。在实施例中,从第一传感器单元、第二传感器单元和/或第三传感器单元收集的数据是推断数据。
22.可以相对于数据处理的级别来定义收集的传感器数据的级别。因此,原始数据可以是由相应的传感器单元捕获的初始数据。特征提取数据可以是经预处理的数据,相应的传感器单元可以利用该数据识别一个或多个特征。推断数据可以是为检测到的特征的特性确定而评估和预测的数据。控制单元可以被配置为自动学习传感器数据的融合在哪个水平上对检测结果最有益。在控制单元中,可以实现训练策略,该策略将学习集中在特定的传感器类型上。
23.因此,控制单元可以被配置为执行数据融合,其中来自第一传感器单元、第二传感器单元和/或第三传感器单元的原始数据被合并。控制单元还可以被配置为执行特征融合,其中特征最初从传感器数据中提取。此外,控制单元可以执行决策融合,其中可以基于由第一传感器单元、第二传感器单元和/或第三传感器单元生成的特征推断数据做出最终决策,以确定障碍物的精确位置。
24.在实施例中,控制单元被配置为确定车辆舱室中障碍物的位置对于子系统的致动是否具有破坏性。在识别和确认障碍物及其在车辆舱室中的位置之后,控制单元可以进一步评估障碍物是否会至少部分或全部阻碍子系统的致动。在障碍物被确定为对子系统的操作具有破坏性的情况下,则控制单元可以警告乘员并限制或禁用子系统的操作。因此,监测系统使能可以在车辆舱室中移动的子系统的更高的安全完整性。
25.在实施例中,控制单元被配置为基于用于子系统的操作的命令,启动通过第一传
感器单元、第二传感器单元和/或第三传感器单元扫描车辆舱室。当控制单元接收到致动子系统的信号时,控制单元可以促使第一传感器单元、第二传感器单元和/或第三传感器单元生成用于确定障碍物的数据。该信号可以是乘员的输入和/或控制单元的任何不可避免的命令,这取决于驾驶情况,诸如车辆碰撞。
26.在实施例中,控制单元被配置为如果障碍物被移除或被重新定位至与子系统操作相关的安全位置,则允许子系统的致动。控制单元可以在子系统的操作被拒绝之后连续监测潜在的风险是否被克服以使能子系统的期望操作。也有可能障碍物可以在控制系统警告破坏性障碍物之后被移动,使得乘员可以重新定位障碍物以使能子系统的致动。
27.根据本公开,呈现了一种车辆。该车辆包括如上所述的监测系统。因此,车辆可以具有车辆舱室中子系统的更高的安全完整性。
28.根据本公开,呈现了一种用于监测车辆舱室的方法。该方法不一定按此顺序包括
[0029]-通过第一传感器单元生成车辆舱室的图像数据,
[0030]-通过第二传感器单元生成车辆舱室的非图像数据,
[0031]-收集图像数据和非图像数据,并基于此确定车辆舱室中是否有障碍物,以及
[0032]-如果障碍物对子系统的致动具有破坏性,则限制子系统的致动。
[0033]
应当注意,上述实施例可以相互组合,与所涉及的方面无关。因此,方法可以与结构特征相组合,同样,系统可以与上述关于方法的特征相组合。
[0034]
根据下文所述实施例,本实施例的这些和其他方面将变得显而易见。
附图说明
[0035]
下文将参照以下附图描述示例性实施例。
[0036]
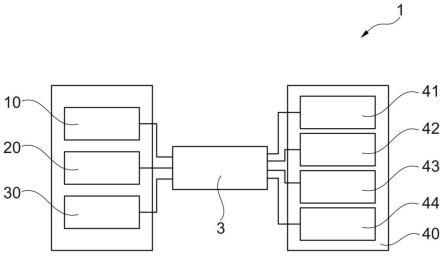
图1示意性和示例性地示出了根据本公开的监测系统的实施例。
[0037]
图2、图3示意性和示例性地示出了根据本公开的通过监测系统的第一传感器单元和第二传感器单元检测的区域的实施例。
[0038]
图4示意性和示例性地示出了根据本公开的子系统的实施例。
[0039]
图5示意性和示例性地示出了根据本公开的用于监测舱室车辆的方法。
具体实施方式
[0040]
图1示出了监测系统1,其集成在车辆100中,用于监测车辆舱室2。监测系统1包括第一传感器单元10和第二传感器单元20。第一传感器单元10被配置为生成车辆舱室2的图像数据。第一传感器单元10可以是包括至少一个光学图像传感器和诸如鱼眼镜头的宽视场镜头的相机,以获取车辆舱室2的整个区域的图像数据并检测车辆舱室2中的视觉障碍。第二传感器单元20被配置成生成车辆舱室2的非图像数据。第二传感器单元20被配置为检测来自车辆舱室2中的障碍物的反射信号。第二传感器单元20可以是雷达系统。
[0041]
如图2所示,第一传感器单元10被安装在车辆100的纵向方向上,并且第二传感器单元20的多个传感器元件被布置在横向方向上,即垂直于车辆的驾驶方向。如图3所示,车辆舱室2的基本整个区域可以通过第一传感器单元10和第二传感器单元20检测,以提供关于车辆舱室2的可靠信息。
[0042]
监测系统1还包括第三传感器单元30,其包括一个或多个子系统传感器。第三传感
器单元30被配置为向控制单元3发送子系统40的操作数据。子系统40例如是天窗系统41、窗户系统42、头枕系统43、座椅调节系统44、门系统和/或安全气囊系统(见图4)。
[0043]
控制单元3被配置为从第一、第二和/或第三传感器单元10、20、30收集图像数据和非图像数据,并确定车辆舱室2中是否有障碍物。障碍物可以是位于车辆舱室2中的一个或多个乘员和/或对象。控制单元3基于用于子系统40的致动的命令,启动通过第一传感器单元10、第二传感器单元20和/或第三传感器单元30扫描车辆舱室2。该命令可以是乘员的输入和/或控制单元的任何不可避免的命令,这取决于驾驶情况,诸如车辆碰撞。
[0044]
控制单元3进一步被配置为融合被收集用于确定障碍物的位置的数据。可以相对于数据处理的级别来定义收集的数据的级别。收集的数据可以是原始数据、特征提取数据和/或推断数据。控制单元3可以被配置为自动学习数据融合在哪个级别上对检测结果最有益。在控制单元3中,可以实现训练策略,该策略将学习集中在特定的传感器类型上。
[0045]
控制单元3基于从第一传感器单元10、第二传感器单元20和/或第三传感器单元30收集的数据,确定车辆舱室2中障碍物的位置对子系统40的致动是否具有破坏性。如果障碍物被确定为对子系统40的致动具有破坏性,则控制单元3限制或禁用子系统40的致动。如果障碍物被移除,控制单元3允许子系统40的致动。
[0046]
图5示意性地示出了用于监测车辆舱室2的方法。该方法包括
[0047]
s0子系统40处于非活动模式,
[0048]
s1接收用于子系统40的致动的命令,
[0049]
s2基于用于子系统40的致动的命令,启动通过第一传感器单元10、第二传感器单元20和/或第三传感器单元30扫描车辆舱室2,
[0050]
s3通过第一传感器单元10生成车辆舱室2的图像数据,
[0051]
s4通过第二传感器单元20生成车辆舱室2的不可见数据,
[0052]
s5收集图像数据和不可见数据,并基于此确定车辆舱室2中是否有障碍物,
[0053]
s6通过第三传感器单元30收集子系统40的操作数据,
[0054]
s7通过融合从第一传感器单元10、第二传感器单元20和/或第三传感器单元30收集的数据来确定障碍物的位置,
[0055]
s8确定车辆舱室2中的障碍物的位置对子系统40的致动是否具有破坏性的,
[0056]
s9如果障碍物对子系统40的致动具有破坏性,则限制子系统40的致动,
[0057]
s10如果障碍物被移除,则允许子系统40的致动。
[0058]
必须注意的是,本公开的实施例是参照不同主题来描述的。具体地,一些实施例是参照方法类型权利要求来描述的,而其他实施例是参照设备类型权利要求来描述的。然而,本领域技术人员将从上面和下面的描述中了解到,除非另有说明,除了属于一种类型的主题的特征的任何组合之外,与不同主题相关的特征之间的任何组合也被认为是由本技术公开的。然而,所有的特征都可以被组合,提供不仅仅是这些特征的简单总和的协同效应。
[0059]
虽然已在附图和说明书中详细说明和描述了本公开,但此类说明和描述应视为说明性或示例性的,而非限制性的。本公开不限于所公开的实施例。通过研究附图、公开内容和从属权利要求,本领域技术人员在实践所要求保护的公开内容时可以理解和实现所公开实施例的其他变型。
[0060]
在权利要求中,词语“包括”不排除其他元件或步骤,不定冠词“一”不排除多个。单
个处理器或其他单元可以实现权利要求中再次引用的若干项目的功能。在相互不同的从属权利要求中引用某些措施的事实并不指示这些措施的组合不能被有利地使用。权利要求中的任何附图标记不应被解释为限制范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1