用于确定用于运行中的机动车的舒适度值的方法与流程
1.本发明涉及一种用于确定用于运行中的机动车的舒适度值的方法。此外,本发明涉及一种具有加速度传感器、初始传感器以及用于确定舒适度值的时钟的机动车。
背景技术:
2.在现代机动车中,机动车的自主的或部分自主的控制越来越突出。除了用于实现自主行驶车辆的复杂的技术要求之外,还产生了另外考虑客户专属的规格的要求。在许多情况下,除了自主行驶的车辆的安全行驶之外,还期望相应的行驶舒适度。同样可以在驾驶风格方面得出对自主行驶的机动车的相应的期望。
3.尤其在半自主或自主行驶的机动车中可能出现晕动病。这种晕动病原则上可以与晕船相提并论。因此,在开发自主行驶的机动车或这种系统时产生如下需求:能够客观地相互比较不同的行驶风格。特别地,应该能够客观地相互比较不同的自主控制器。由jan elsner撰写的慕尼黑工业大学的出版物“在轨迹规划的成本函数中优化乘客舒适度”涉及与舒适度方面相关的成本函数。然而,没有提到(不同的行驶控制或行驶方式可以相互比较的)客观的舒适度值。
4.公开文献de 10 201 5 209 575 a1描述了一种导航设备和一种导航方法。导航设备包括接口,以便从车辆中的至少一个用户获得针对至少一条行驶路线的多个舒适因素的点评估。基于所接收的点评估,计算用于至少一条行驶路线的净舒适度值。根据净舒适度值,控制器建议一条或多条行驶路线到行驶目的地。
5.本发明基于如下认识:除了对高行驶舒适度的期望之外,在行驶风格方面也存在不同的要求或想法。例如,20岁出头的年轻有活力的人具有与已经处于退休年龄的老年人不同的驾驶行为。例如,几种驾驶风格可以分为舒适、高效、敏捷或运动等类别。根据驾驶员的不同,在驾驶风格方面可能产生不同的偏好。在开发自主行驶的机动车或部分自主行驶的机动车时,机动车的相应控制应越来越多地通过相应的电子控制装置来承担。除了机动车的可靠运行之外,在此也重要的是实现相应的驾驶风格。然而,为此必须能够客观地相互比较用于自主行驶的机动车的不同的行驶方式或控制系统。这样的方案迄今还是未知的。
技术实现要素:
6.本发明的要解决的技术问题在于,创建或提供一种客观的比较参量,借此可以更好地相互比较在运行的机动车中的不同的行驶方式。不同的行驶方式可以涉及不同的控制单元和/或涉及不同的人员,所述人员引导或运行机动车。因此,例如自主机动车控制器的第一制造商或开发者可以提供相应的控制单元。这同样适用于第二制造商。虽然这两个控制单元能够实现可靠的部分自主或自主驾驶,但是在驾驶舒适度或驾驶风格方面可能产生差异。
7.本发明在此提出一种方法,以便能够更好且更客观地相互比较这种不同的驾驶风格。该方案优选针对不同的自主或部分自主的控制系统,然而也可以扩展到不同的人类驾
驶方式。
8.所述技术问题通过一种用于确定用于运行中的机动车的舒适度值的方法解决,包括以下方法步骤:
9.a)基于在所述机动车运行时经过的时间、测量的纵向加速度、测量的横向加速度以及关于所述纵向加速度和横向加速度预先给定的加权因子计算用于所述舒适度值的成本函数,
10.b)在考虑通过导航单元提供的当前的交通量的情况下、调用涉及所述机动车的估计的行驶时间的第一时间值和涉及所述机动车的预计的现实的行驶时间的第二时间值,
11.c)借助所述导航单元的第一和/或第二时间值对所计算的成本函数进行归一化,以确定用于运行中的机动车的舒适度值。
12.本发明的第一方面涉及一种用于确定用于运行的机动车的舒适度值的方法。特别地,舒适度值可以用于评估驾驶风格。该方法可以包括以下步骤。首先,根据在机动车运行时经过的时间、测量的纵向加速度、测量的横向加速度并且根据基于纵向加速度和横向加速度的加权因子来计算用于舒适度值的成本函数。加权因子可以影响成本函数并且与纵向加速度和/或横向加速度相关。优选地,预先给定加权因子。在本文中,术语“计算”可意指确定、分析、评估和/或估算。尤其在机动车运行期间测量经过的时间。这优选适用于机动车在道路交通中的运行或行驶。经过的时间尤其可以包含相应于机动车的开始运行的时刻作为开始时间点。
13.术语“机动车的运行”尤其包括机动车在行驶期间或在道路交通中的路线期间的所有动作和操作。因此,例如基于自动启停装置的机动车的发动机的可能的短时停用同样计入在机动车运行时经过的时间。因此,机动车经过的时间可以包括开始时间点和结束时间点。起始时间点尤其涉及机动车用于路线或行驶的启动,而结束时间点尤其代表机动车的路线或行驶的结束。
14.在另一步骤中,在考虑当前交通量的情况下,由导航单元调取涉及机动车的估计的行驶时间的第一时间值和涉及机动车的预计的现实的行驶时间的第二时间值。第一和/或第二时间值优选通过导航单元提供和/或确定。导航单元可以构造为外部导航单元。外部导航单元可以设计为实时导航。估计的行驶时间可以被称为第一时间值或第一行驶时间,预计的现实的行驶时间可以被称为第二行驶时间或第二时间值。通常,由于考虑当前交通量,第一行驶时间和第二行驶时间不同。第二行驶时间优选由外部导航单元提供。为此,控制单元可以借助接口建立与外部导航单元的数据连接并且调用第一和/或第二时间值。第一时间值尤其表示机动车沿着预先给定的路线的估计的行驶时间。所估计的旅行时间(第一时间值)尤其考虑路线走向,预先给定的速度限制和/或与交通无关地预先给定的路线参数,例如十字路口或斑马线。基于这些参数,可以给出用于机动车的行驶或路线的估计的旅行时间。
15.第二时间值尤其涉及机动车的预计的现实的行驶时间。在第二时间值中尤其考虑当前的交通状况或当前的交通量。当前的交通报告,例如拥堵或道路阻塞也可以一起纳入第二时间值中。这两个时间值优选由导航单元调用。导航单元可以是位于机动车内部并且可以建立到导航服务器的数据连接的设备。为此,可以通过机动车的接口建立与导航服务器的相应的数据连接。从那里可以获得或调用这两个时间值。(外部)导航单元可以例如借
助在线地图服务提供商实现实时导航。在此,重要的不是导航单元的具体设计方案或者甚至是相应的提供者,而是第一时间值和/或第二时间值由导航单元提供并且可被调用。为此优选规定,机动车具有相应的接口,由此能够建立与导航服务器的数据连接。
16.在另一步骤中,借助导航单元的第一和/或第二时间值对所计算的成本函数进行归一化(或称为标准化),以便确定用于运行中的机动车的舒适度值。归一化尤其可以意味着,成本函数与第一和/或第二时间值相关联。具体地,这可以意味着,成本函数的值除以第一或第二时间值。所计算的成本函数尤其可以是数值。数值可以是商,其中分子包含成本函数的值,分母包含两个时间值中的一个。这同样适用于第一和/或第二时间值。成本函数以及时间值可以具有单位秒。因此,借助于时间值对所计算的成本函数进行归一化优选地导致无量纲的单位。
17.基于该归一化,可以为所运行的机动车提供客观的舒适度值。因此,可以更客观地相互比较同一机动车的多次行驶。因此,为了比较不同的驾驶方式的驾驶风格,例如可以更好地计算出非过失的延迟,例如在高速公路上突然实施的速度限制、在红绿灯处出人意料地更长的红灯阶段等等。例如,如果第二机动车仅以与第一机动车相同的速度一半的速度驶过相同的路段,则这首先会导致相应更差或更高的舒适度值。这尤其是因为,由于较慢的速度相应地在成本函数中得到较高的值。在这种情况下,仅仅由于更舒适的驾驶方式,成本函数和因此舒适度值对于两个机动车而言会明显不同。然而,这种不同的交通情景并不一定具有客观的可比性。出于该原因,所述方法提出,借助于第一和/或第二时间值对所计算的成本函数进行归一化。在这种情况下,纵向加速度以及横向加速度将作为影响变量保留在成本函数中。例如(可以通过频繁的制动和重新加速来表征的)忙碌的行驶方式会导致成本函数的相应提高。这种行驶方式在忽略归一化的情况下可能由于较长的时间而被模糊,所述较长的时间可能由相应的较慢的行驶引起。因此,借助于成本函数的归一化,尤其可以计算出那些并非源于一种驾驶方式的因素。在此提出的舒适度值因此尤其包含主要归因于驾驶方式和/或驾驶行为的影响因子。因此,可以实现不同驾驶风格或驾驶方式的更好的可比性。
18.附加的或替选的改进方案规定,将成本函数与第一和/或第二时间值相关联,以便确定舒适度值。特别地,计算出的成本函数除以第一和/或第二时间值。这尤其涉及归一化步骤。在此,可以形成商,其中,在分子中使用所计算的成本函数,并且在分母中使用第一或第二时间值。已经提到的优点合理地适用于该改进方案。
19.附加地或替代地,成本函数可以根据纵向急动度横向急动度(querruck)以及与纵向急动度和横向急动度相关联的加权因子来计算。加权因子优选是预先给定的和/或可以在制造商方面预先给定的。纵向加速度、横向加速度、纵向急动度和横向急动度可以分别具有自己的加权因子。在该改进方案中,除了纵向加速度和横向加速度之外,也可以考虑不均匀的加速度,即以急动度(或称为颠簸、冲击)的形式。急动度尤其是加速度的时间导数或关于时间的第三阶导数。在这种情况下,繁忙(或者说匆忙)的驾驶模式将更多地反映在成本函数中。因此,可以实现对驾驶风格的更确切和更精确的分析,并且因此可以实现更好的可比性。
20.附加地或替选地可以规定,成本函数涉及具有预先给定的最小长度的路段。优选地,该路段具有至少10km的长度。因此,可以更好地消除短距离上的干扰效应。因此可以提
高舒适度值在其意义方面的可靠性。
21.附加地或替选地可以规定,所述成本函数的计算、两个时间值的调用和/或归一化在机动车的运行期间进行。因此,用于确定舒适度值的方法优选在行驶期间或在机动车沿着路线运行期间执行。尤其可以将所确定的舒适度值存储在机动车的存储单元上和/或存储在外部的存储单元上。在此,附加地可以存储具有舒适度值的所属的时间戳。时间戳可以包括代表机动车经过的时间开始时间点和结束时间点。因此,在行驶或路线期间就已经可以评估出行驶风格。该舒适度值可以显示在机动车中的显示器上。因此,可以在机动车运行期间进行关于驾驶风格和/或舒适度值的反馈。
22.一个有利的改进方案附加地或替选地规定,通过多次计算、调用第一和/或第二时间值和/或归一化来确定多个舒适度值。同样可以多次调用时间值和/或多次进行相应的归一化。所述多个舒适度值优选为了评价驾驶风格而相互比较,并且基于该比较提供用于机动车的自主的或部分自主的控制。该改进方案尤其对于评估用于自主行驶或部分自主行驶的机动车的不同的控制单元是有意义的。因此,例如机动车可以多次沿着预先给定的路线自主地或部分自主地运动。在此,可以分别使用控制机动车的不同的控制单元。因此,可以为每个控制单元分配相应的舒适度值。所述多个舒适度值因此可以相互比较。因此,例如可以客观地相互比较来自不同制造商的不同控制单元。相应的舒适度值尤其可以代表相应的驾驶风格。根据预设,可以提供用于机动车的自主或部分自主控制的相应的控制单元或相应的舒适度值。所述“提供”可以包括或意味着舒适度值的选择及其用于机动车的自主或部分自主控制的应用。在该改进方案中,优选将相应的舒适度值与所属的控制器或所属的控制单元关联。因此,可以基于所述多个舒适度值来提供和/或选择相应的控制单元或相应的控制器。
23.此外,附加地或替选地可以规定,根据预先给定的多个行驶模式对舒适度值进行分类,并且仅将相同行驶模式的舒适度值相互比较。不同的驾驶模式例如可以分为舒适的、高效的、敏捷的和/或运动的类别。在所提到的可能性之间的分级也是可以设想的。运动型驾驶风格可以具有与舒适型驾驶风格不同的舒适度值。这尤其可以表现在舒适度值的各个部分方面。运动驾驶风格尤其包括在纵向和横向加速时的较高份额。这同样适用于纵向急动度和/或横向急动度。因此,可以更有针对性地进行比较。
24.附加地或替选地可以规定,根据相应的行驶模式限定加权因子。如果例如运动型驾驶风格是优选的,则可以降低相应的加权因子。在这种情况下,计算成本函数不一定会导致自动恶化的舒适度值。以这种方式,可以在自主或部分自主的机动车控制中考虑操作人员的期望的驾驶风格。加权因子原则上可以单独设定,但优选在制造商方面预先设定。
25.附加地或替选地,从多个舒适度值中选择和/或提供最小的舒适度值用于机动车的自主或部分自主的控制。该改进方案对应于最常见的应用情况。通常期望机动车的舒适且高效的行驶。这种行驶值最有可能通过尽可能小的舒适度值来表示。因此,可以为大多数客户要求找到良好的驾驶风格。
26.附加地或替选地,成本函数可以根据机动车的行驶速度、gps坐标和/或所行驶的路段长度来计算。作为经过的时间的行驶时间尤其在成本函数或成本函数中被考虑。在经过的时间内,可以考虑速度。尤其可以将成本函数在行驶的路段长度方面被归一化。在这种情况下,计算出的成本函数可以除以行驶的路线长度。借助于相应的项以及用于行驶速度
的加权因子,可以在计算成本函数时考虑机动车的速度。这也可以适用于gps坐标。可以在成本函数中另外考虑gps坐标。因此,能够实现更详细的成本函数并且因此能够实现相应的驾驶风格的更精细的比较。
27.本发明的第二方面涉及一种机动车,该机动车可以实施相应的用于确定舒适度值的方法。机动车优选具有用于测量纵向加速度和横向加速度的加速度传感器。优选地,其还包括用于测量纵向急动度和横向急动度的急动度传感器。急动度传感器尤其可以构造为经修改的加速度传感器和/或惯性传感器。经修改的加速度传感器和/或惯性传感器可以被设计用于检测加速度并且将加速度变换为急动度。这例如可以通过形成加速度关于时间的导数来实现。
28.机动车优选具有时钟、秒表或类似的传感装置,以便在机动车运行时测量经过的时间。此外,机动车优选具有控制单元,该控制单元构造用于基于机动车在运行时经过的时间,基于纵向加速度、横向加速度以及关于纵向加速度和横向加速度预先给定的加权因子来计算舒适度值的成本函数。
29.加速度传感器可以被认为是第一传感器,并且急动度传感器可以被认为是第二传感器。第一传感器可以测量纵向和横向加速度。第二传感器可以测量纵向和横向压力。为此,第二传感器可以例如通过所测量的加速度的时间导数将所测量的加速度变换为急动度。特别地,第一传感器和第二传感器可以构造为共同的传感器或传感器单元。在这种情况下,传感器单元可以检测或测量加速度和急动度。
30.机动车优选具有控制单元。控制单元可以具有处理器装置,所述处理器装置设置用于执行方法的实施方式。为此,处理器装置可以具有至少一个微处理器,至少一个微控制器,至少一个fpga(现场可编程门阵列),至少一个dsp(数字信号处理器)和/或神经网络。此外,处理器装置可以具有程序代码,所述程序代码设置用于,在通过处理器装置实施时执行所述方法的实施方式。程序代码可以存储在处理器装置的数据存储器中。控制单元可以包括内部或外部存储单元。外部存储单元可以构造为云单元。
31.成本函数的计算尤其可以借助于以下公式来表示。
[0032][0033]
在公式1中,“time”表示经过的时间,w
ax
、w
ay
分别表示纵向加速度和横向加速度的加权因子,w
jx
和w
jy
分别表示纵向急动度或横向急动度的加权因子。变量x和y尤其表示笛卡尔坐标系中的位置坐标。ax优选地表示沿x方向、行驶方向的加速度,ay优选地表示在行车道平面中垂直于行驶方向的横向加速度。这同样适用于由jx表示的x方向上的急动度和由jy表示的急动度jy。代替笛卡尔坐标,也可以使用其它坐标系。
[0034]
舒适度值可以通过以下公式确定。
[0035]
或
[0036]
公式2
[0037]
kpi表示公式2中的舒适度值,j从公式1中已知。z1和z2分别表示第一时间值和第二时间值。公式2具体表示成本函数的归一化。
[0038]
控制单元还被构造或设置用于,调用涉及机动车的估计行驶时间的第一时间值和涉及机动车的预计的现实的行驶时间的第二时间值,其中,预计的现实的行驶时间考虑当前的交通量或当前的交通状况。当前的交通状况或当前的交通状况尤其由导航单元提供。因此,两个时间值优选由导航单元调用。此外,控制单元可以借助导航单元的第一和/或第二时间值使计算出的成本函数归一化,以便确定用于运行的机动车的舒适度值。
[0039]
结合根据本发明第一方面的方法提出的特征,优点和示例相应地适用于根据本发明第二方面的机动车,反之亦然。装置特征可以被理解为方法特征,并且方法特征同样可以被解释为装置特征。
[0040]
在前面的改进方案和实施例中提到的优点可以按意义转移到机动车上。机动车还可以具有接口。利用该接口可以建立与数据服务器或导航单元的服务器的连接。导航单元可以布置在外部,即布置在机动车外部。因此,第一和/或第二时间值可以由外部导航服务器调用。
附图说明
[0041]
现在借助示例性附图更详细地阐述本发明。在此应注意的是,附图仅示出优选的实施例或改进方案,而在此不限制本发明。在附图中,功能相同的元件分别设有相同的附图标记。在附图中:
[0042]
图1示出机动车在坐标系中的示例性示图;
[0043]
图2示出用于确定或计算舒适度值的示例性示图;
[0044]
图3示出机动车的示例性行驶路线;
[0045]
图4示出有和没有归一化的已计算的舒适度值的比较;
[0046]
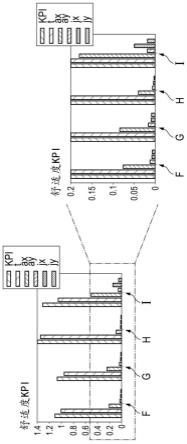
图5示出确定的舒适度值的另一个例子。
具体实施方式
[0047]
下面解释的实施例是本发明的优选实施例。在实施例中,所描述的部件分别是本发明的单独的、彼此独立地考虑的特征,所述特征分别也彼此独立地改进本发明,并且因此也单独地或以与所示出的组合不同的组合被视为本发明的组成部分。此外,所描述的实施例也可以通过本发明的其他已经描述的特征来补充。
[0048]
在图1中示出具有坐标系x,y和z的机动车10。x轴尤其表示机动车10的行驶方向,y方向表示机动车10的横向方向,并且z方向表示机动车10的垂直方向。在大多数情况下,机动车10的z方向不具影响。只要机动车10不构成为飞行出租车,z分量就可以忽略。本发明优选涉及在x-y平面中运动的陆上运行的机动车10。然而,原则上,本发明也可以扩展到可飞行的车辆,例如飞行出租车。
[0049]
机动车10可以具有时钟11、加速度传感器12、急动度传感器13、控制单元a以及接口14。控制单元a可以被设计用于特定的行驶模式。机动车10同样可以具有内部的导航设备16。内部导航设备16可以集成在车载电子设备中或者作为移动导航设备16临时固定在挡风玻璃上。时钟11用于测量机动车10运行时经过的时间t。这尤其是起始时间点和结束时间点的差值。这两个时间点尤其代表行驶或路线的开始和结束。加速度传感器12主要用于测量纵向加速度ax或横向加速度ay。特别地,为了测量纵向加速度ax,可以存在自身的加速度传
感器。相应地,横向加速度ay可以借助另外的附加的单独的加速度传感器来测量。纵向加速度ax和横向加速度ay优选可以借助多维加速度传感器同时测量。该多维传感器可以被配置为同时测量加速度和急动度。特别地,多维传感器可以分别在不同的空间方向上检测或测量急动度和加速度。
[0050]
借助于急动度传感器13可以检测纵向急动度jx和/或横向急动度jy。纵向急动度jx或横向急动度jy可以通过一个或多个急动度传感器13测量。所述一个或多个急动度传感器13可以是惯性传感器13或经修改的加速度传感器。相比之下,“正常”加速度传感器12可以检测和/或测量纵向加速度ax和横向加速度ay。也可能的是,加速度传感器12和急动度传感器13通过共同的传感器单元实现。
[0051]
对于纵向急动度jx和横向急动度jy,可以分别设置单独的急动度传感器13。借助接口14,机动车10可以建立与外部导航单元15的连接。外部导航单元15优选能够实现实时导航。外部导航单元15可以具有外部服务器。通过接口14,控制单元a可以建立与外部导航单元15的服务器的数据连接并且调用第一时间值z1和/或第二时间值z2。
[0052]
在图2中示例性地示出了本发明的示意性流程。在图2的左侧区域中示出了不同的图表。这些图表例如可以表示纵向加速度ax和横向加速度ay。这同样适用于纵向急动度jx和横向急动度jy。同样地,时间t可以导入成本函数cf的计算中。在这方面,附图标记t和公式1中的术语“时间”可以表示相同。成本函数cf可以包含不同的项,其通过相应的加权因子wax,way,wjx和wjy来表征。
[0053]
在图2的中间示出了加权因子的示例性分布。通常,权重因子是预先给定的。然而,如果期望对成本函数cf进行客户特定的调整,则可以单独地调整加权因子。通过成本函数cf,输入数据ax,ay,jx和jy以及经过的时间t可以确定或计算舒适度值kpi。本发明在此优选规定,计算新的归一化舒适度值kpi。为此,尤其从内部导航单元16或外部导航单元15调用第一时间值z1和/或第二时间值z2。内部导航单元16可以是智能手机、掌上电脑和/或平板电脑。第一时间值z1尤其代表行驶路线的预计持续时间或机动车10的预计行驶时间或旅行时间。然而,在第一时间值z1的情况下,通常还不考虑当前的交通状况。通常在第一时间值z1的情况下还不考虑道路阻塞或拥堵。相反,第二时间值z2优选考虑当前的交通流量或当前的交通报告。因此,第二时间值z2对应于机动车10的路线的预计的现实行驶时间、行驶持续时间或持续时间。第二时间值z2可以被认为是实际的现实时间值。在大多数情况下,优选借助第二时间值z2进行归一化。
[0054]
成本函数cf可以被称为成本函数(kostenfunktional)。借助于成本函数和实验式决定的加权因子w
ax
、w
ay
、w
jx
和w
jy
,舒适度相关的测量变量(如纵向加速度ax,横向加速度ay,纵向急动度jx和横向急动度jy)可以计算舒适度值kpi。舒适度值kpi优选地被归一化并且可以相应地在显示器上输出。舒适度值kpi可以归一化为行驶路段或路段距离。为了计算出交通影响和路线特定的特性,例如环形交叉路口、十字路口、红绿灯等,优选在确定或计算舒适度值kpi时考虑导航单元15的实时导航数据。这尤其通过归一化来实现。借助于该归一化的舒适度值kpi可以更好地评价,优选更好地比较地评价在道路交通中的不同路线上的行驶舒适度或行驶风格。通常,所计算的归一化的行驶舒适度值越小,行驶舒适度越好。
[0055]
借助于如此提出的归一化的舒适度值kpi,已经存在的舒适度相关的测量参量可以被换算成关于行驶舒适度的新的客观上可比较的度量。这种新的驾驶舒适度度量代表了
归一化成本函数。借助这样的舒适度值,已经可以在开发过程中跨越制造商地客观地相互比较和/或评估不同的驾驶风格。因此,可以实现更好的协调。
[0056]
在图3中示例性地示出了用于机动车10的可能的行驶路线。行驶路线由起点s和目的地d定义。在图3中所示的路段长度为11公里。按照图3示出了沿路线的多个站1至5。第一时间值z1估计为22分钟。在图3的示例中,成本函数也可以在路段长度方面被归一化。关于路段长度的归一化可以借助于相应的修正因子来表达。该修正因子cfr尤其是时间值与路段长度的商。在图2的情况中,修正因子cfr=22
×
60:11=120秒每公里。因此,修正因子尤其具有单位秒/米(s/m)。根据应用情况,还必须进行关于单位的转换。修正因子cfr对应于公里时间,该公里时间也被称为步速。公里时间尤其是速度的倒数。
[0057]
在图4中,多个舒适度值kpi的结果彼此相邻地示出。图4和图5所示的两个图表标题为“舒适度-kpi”。左图示出了五种不同的行驶,所述行驶全部以相同的控制单元a或以相同的行驶方式进行。在图4中示出的行程涉及分别具有不同交通密度的不同路线。不同的行程和路段用数字表示。a1表示第一路段,a2表示第二路段,依此类推。所有路段在图4中由控制单元a实现。控制单元a可以是人或者通过车载计算机实现对机动车10的自主控制。在自主行驶中,由于相应的控制单元或人导致不同的行驶方式或行驶风格。在每次行驶中绘制六个条,其中舒适度值kpi以及经过的时间t分别代表最大的份额。其余部分分布在纵向加速度ax、横向加速度ay、纵向急动度jx和横向急动度jy上。图4的左侧区域在此分别示出在没有执行标准化的情况下的舒适度值kpi。在此可以看出,与图4的右图相比,相关联的kpi值经受更强的波动。
[0058]
图4的右图示出了与图4的左图中相同的情况,其中执行了相应的归一化。在此可以很好地看出,在舒适度值kpi处的分散明显减小。在图4中的右图中,归一化减小了舒适度值kpi的离散度,其中,理想的结果是0%的离散度。在左图中,最大偏差为42%,而在右图中,舒适度值kpi彼此之间的偏差要小得多。因此可以更好地计算出会延长路线或行驶的持续时间、但对驾驶风格或行驶舒适度没有直接影响的干扰影响。因此,可以更好地相互比较驾驶舒适度或驾驶风格。在许多情况下,期望最大的驾驶舒适度。这通常对应于最低舒适度值。在此设定,加权因子是预先确定的,并且不被改变。在图4的示例中,第五路段a5能够实现最大的行驶舒适度。
[0059]
由第三组条(左起第三组)表示的第三路段a3在图4的示例中具有最差的舒适度值kpi。然而,借助于对期望的驾驶风格的客户特定的单独调整,第三行驶a3可以作为最佳行驶出现。如果运动驾驶风格被期望,这将是这种情况。这可以通过相应地调整加权因子来表示。然而,在这种情况下,将第三行程a3与第五行程a5(在图的右侧)进行比较。优选地,仅能够配属于相同的驾驶风格或驾驶模式的那些控制单元相互比较。在图4的示例中,分别使用相同的控制单元a。名称a1至a5旨在说明,在图4的示例中始终使用相同的控制单元a。这里可以比较不同的距离。因此,例如可以选择或预设用于运行机动车的舒适的和/或更有效的路线。
[0060]
图5同样示出两个图表,所述图表示出舒适度值kp1以及所属的影响参量t、ax、ay、jx和jy。如在前面的图4中那样,舒适度值kp1决定性地受到经过的时间t的影响。为了更详细的分析,图5的右图示出了在y轴的0至0.2范围内的放大图。在图5中,将不同的控制单元f至i彼此比较。图5的右图清楚地示出,控制单元i具有比控制单元h更大的纵向加速度ax。这
可能是由于控制单元i没有被正确分类,即它代表运动的行驶方式而不是高效的行驶方式,或者控制单元i实际上比控制单元h更不适合于高效和舒适的行驶。通过成本函数cf的归一化,可以产生经调整的舒适度值kpi,所述舒适度值可以计算出延长的行驶时间。成本函数cf的归一化由此尤其引起:驾驶风格典型的影响变量或参数更强烈地表达。
[0061]
该方法可以包括测量机动车10在确定的路线上的行驶参数,其中,行驶参数可以包括纵向加速度ax、横向加速度ay、纵向急动度jx、横向急动度jy、行驶速度或行驶时间。可选地,gps坐标可以被纳入成本函数cf的确定中。在使用上述参数的情况下,可以在确定的平均速度和/或行程时间下计算成本函数cf的值。因此,可以借助成本函数推导出舒适度值kpi。行驶参数优选地包括实时导航数据,以便考虑交通和路线特定特征的影响,例如环形交通、交叉路口、红绿灯等。
[0062]
借助于(包含成本函数的归一化的)所提出的新的舒适度值,可以根据新的舒适度值kpi更好地识别不同的驾驶风格。成本函数cf可以实现舒适度值kpi与水平加速度之间的平衡。成本函数cf或舒适度值kpi在路线长度方面的归一化可以实现不同路线的可比性。借助于修正因子cfr可以更好地计算出不同路线的参数,所述参数不直接涉及驾驶风格。
[0063]
修正因子cfr可以通过以下公式确定。
[0064]
cfr=(z1或z2)/长度
[0065]
公式3
[0066]
在公式3中,路线的长度被称为“长度”。z1和z2表示第一时间值z1或第二时间值z2。
[0067]
附加地或替代地,归一化可以扩展到成本函数j的值。这可以通过下式表示。
[0068]
j=j/长度
[0069]
公式4
[0070]
归一化成本函数cf在此用j表示。优选地,公式1和2用于所述方法和归一化。
[0071]
根据公式4的归一化的成本函数j可以用作用于比较的结果,尤其作为每公里舒适度值的比较值。归一化的成本函数j尤其表示每公里的路段特定的成本函数值。因此,归一化可以附加地包括成本函数cf或j的归一化。
[0072]
根据公式3归一化到路段长度上的第一时间值z1或第二时间值z2可以说明针对路段的时间特定的长度特性。根据公式3,可以给出每公里运行多少时间或每公里需要多少时间消耗。因此,根据公式3定义的修正因子cfr可以允许对每公里的时间消耗进行评估。因此,归一化也可以附加地包括时间值关于路段长度的归一化。该归一化特别地由公式3表示。根据公式3和4计算的值尤其不仅包含路段特性(以修正因子cfr的形式)而且包含借助于时间传感器11,加速度传感器12和/或急动度传感器13的测量。优选地,除了舒适度值kpi之外,在归一化时附加地同样确定归一化的成本函数j和修正因子cfr并且在需要时输出或显示。所有确定的变量,如舒适度值kpi、时间值z1,z2、归一化成本函数j、修正因子cfr可以在显示器上显示或从音频输出中输出。所有这些值可以作为一个整体结果显示。
[0073]
借助于第二时间值z2,舒适度值kpi可以考虑实时信息。为了能够鲁棒地评估用于自主或部分自主行驶的不同的行驶风格和/或控制单元,应多次以不同的行驶风格或控制单元驶过预定的路段。在图5中,控制单元h作为控制单元的可能候选出现,所述控制单元能够实现舒适且高效的行驶。然而,用于确定或计算舒适度值kpi的数据基础应当包括多条路
线。理想情况下,对多个舒适度值进行平均,以便更好地滤除波动。
[0074]
附图标记列表
[0075]
10机动车
[0076]
11时钟,时间传感器
[0077]
12(第一)加速度传感器
[0078]
13急动度传感器,惯性传感器,第二加速度传感器
[0079]
14接口
[0080]
15外部导航单元
[0081]
16内部导航单元
[0082]
x,y,z纵向轴线,横向轴线,垂直轴线
[0083]
kpi舒适度值
[0084]
time,t时间,经过的时间
[0085]
ax纵向加速度
[0086]
ay横向加速度
[0087]
jx纵向急动度
[0088]
jy横向急动度
[0089]
z1第一时间值
[0090]
z2第二时间值
[0091]
cf成本函数
[0092]
cfr修正因子
[0093]
j归一化成本函数的值
[0094]
j成本函数的值
[0095]wax
,w
ay
,w
jx
,w
jy
加权因子
[0096]
s起点
[0097]
d目的地
[0098]
a,f,g,h,i各自的控制单元,控制器
[0099]
a1至a5第一至第五路段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1