一种农用车辆的多功能通用底盘的制作方法
一种农用车辆的多功能通用底盘
【技术领域】
1.本发明展示了一种农用车辆的多功能通用底盘,属于底盘技术领域。
背景技术:
2.在农业机械中的行走系统以拖拉机为主,随着轻量化的田间作业和管理设备的发展,行走系统走向智能底盘方向,现有农用底盘的转弯半径较大,导航精度较低,且通用适配性不高,在地头空间有限和行间距较小的工作区域中很难有效的完成作业。
技术实现要素:
3.本发明所要解决的技术问题在于提供一种农用车辆的多功能通用底盘,该通用底盘能够实现高精度导航。
4.解决上述技术问题,本发明采用如下技术方案:
5.一种农用车辆的多功能通用底盘,包括骨架、行走模块、电控模块、动力模块和导航模块,所述行走模块包括驱动模块和行走轮,所述驱动模块与所述行走轮之间设有传动模块,所述驱动模块通过所述传动模块驱动所述行走轮,所述行走轮与所述传动模块的连接处设有转向节,所述转向节上设有转角传感模块,所述转角传感模块包括转角编码器和编码器支架,所述编码器支架固定在所述转向节上,所述骨架上设有转向模块,所述转向模块与所述转向节相连接,所述电控模块包括主控板,所述动力模块包括增程器和电池包,所述导航模块包括实时定位仪和监测模块,所述监测模块用于检测和感知所述底盘周围障碍物信息,所述骨架前后两端均设有防撞板,所述行走轮包括轮胎,所述轮胎内侧设有用于制动的鼓刹,所述转向节位于所述鼓刹和传动模块之间,所述骨架上设有制动电机,所述制动电机控制所述鼓刹实现对轮胎的制动,所述传动模块上连接有差速器。
6.采用本发明的有益效果是:
7.本发明中采用实时定位仪实时获取本发明的定位信息,所述监测模块对所述骨架四周环境进行检测,及时获取障碍物的信息,使本发明能够规划出更加精准的移动路线,提高本发明的导航精度,此外所述监测模块对所述骨架四周环境进行检测,能够降低本发明与周围环境发生碰撞的可能性,提高本发明的形式安全性,另外通过在所述骨架前后设置防撞板来降低骨架碰撞时受到撞损度,使本发明具有更高的安全性。
8.另外本发明中所述动力模块包括增程器和电池包,采用增程器和电池包交替供电的方式,能够大幅度提高本发明的续航能力,提高本发明的工作时间,减少充电次数,提高工作效率。
9.作为优选,所述传动模块包括驱动桥,所述驱动桥安装在所述骨架底部,所述驱动桥内设有传动轴,所述驱动桥端部设有悬架,所述悬架包括上支架、连接板和弓子板,所述连接板两端分别与所述上支架和弓子板连接,所述上支架与所述骨架连接,所述弓子板上设有用于连接所述驱动桥的固定件。
10.作为优选,所述传动模块的两端均设有转向节,所述转向模块包括转向电机、转向
拉杆、转向连杆、第一转向臂和第二转向臂,所述转向电机安装在所述骨架上,所述第一转向臂和第二转向臂分别与所述传动模块两端的转向节相连接,所述转向拉杆的两端分别连接所述转向电机和第一转向臂,所述转向连杆的两端分别连接所述第一转向臂和第二转向臂。
11.作为优选,所述主控板上设有行走控制器、转向控制器、刹车控制器、电压转换模块和惯性测量模块。
12.作为优选,所述检测模块包括超声波装置和视觉模块,所述超声波装置包括超声波发射器和用于安装所述超声波发射器的超声波支架,所述超声波支架安装在所述骨架上,所述超声波装置用于实时获取所述骨架四周的环境信息,所述视觉模块包括相机和用于安装所述相机的相机支架,所述相机支架安装在所述骨架上,所述视觉模块用于检测所述骨架前方的障碍物信息。
13.作为优选,所述防撞板包括第一防撞条,所述第一防撞条与所述骨架的端部相连接,所述第一防撞条与所述骨架支架设有起缓冲作用的第一气簧,所述第一防撞条两端均设有第二防撞条,所述第一防撞条与所述第二防撞条之间设有用于连接的合页,所述第二防撞条与所述骨架之间设有其缓冲作用的第二气簧,所述第二防撞条呈圆弧状。
14.作为优选,所述传动模块上设有轮速传感器,所述传动模块内设有传动齿轮,所述轮速传感器包括轮速编码器和外齿轮,所述外齿轮与所述传动齿轮传动连接,所述外齿轮中间设有外齿轮轴,所述轮速编码器设有安装轴,所述安装轴与所述外齿轮轴固定连接。
15.本发明的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
【附图说明】
16.下面结合附图对本发明做进一步的说明:
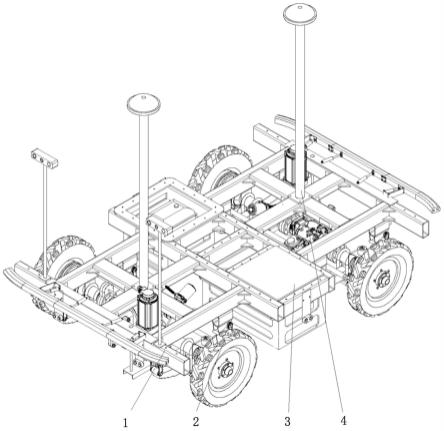
17.图1为本发明实施例的整体结构示意图;
18.图2为本发明实施例的俯视图;
19.图3为图2的局部图;
20.图4为本发明实施例中行走模块的左视图;
21.图5为本发明实施例中所述轮速传感器的剖视图;
22.图6为本发明实施例中悬挂的结构示意图。
23.附图标记:1骨架、2行走模块、21行走轮、211轮胎、212鼓刹、213转向节、214传动模块、215驱动桥、22驱动模块、23转向模块、231转向电机、232转向拉杆、233第一转向臂、234第二转向臂、235转向连杆、24制动电机、25转角传感模块、251转角编码器、252编码器支架、26悬架、261弓子板、262上支架、263连接板、264安装座、265固定板、266u型螺栓、27轮速传感器、271传动齿轮、272中间齿轮、273外齿轮、274外齿轮轴、275轮速编码器、276编码器固定座、277安装轴、28差速器、3电控模块、31电力仓、311增程器、312电池包、313主控板、3131行走控制器、3132转向控制器、3133刹车控制器、3134电压转换模块、3135惯性测量模块、4导航模块、41实时定位仪、42定位柱、43超声波发射器、44超声波支架、45相机、46相机支架、47防撞板、471第一防撞条、472第二防撞条、473第一气簧、474第二气簧、475合页。
【具体实施方式】
24.下面结合本发明实施例的附图对本发明实施例的技术方案进行解释和说明,但下述实施例仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其他实施例,都属于本发明的保护范围。
25.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
26.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确的限定。
27.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
28.实施例1:
29.如图1至6所示,本实施例展示了一种农用车辆的多功能通用底盘,包括骨架1、行走模块2、电控模块3、动力模块和导航模块4,本实施例中共设有两组行走模块2,所述两组行走模块2分别处于所述骨架1的前后两侧,其中所述行走模块2包括驱动模块22和行走轮21,所述驱动模块22与所述行走轮21之间设有传动模块214,本实施例可以通过控制所述骨架1前后两侧的驱动模块22来改变本实施例的驱动方式,本实施例的驱动方式包括前驱模式,仅启动所述骨架1前侧的驱动模块22;后驱模式,仅启动所述骨架1后侧的驱动模块22;以及双驱模式,同时启动所述骨架1前后两侧的驱动模块22;通过改变本实施例的驱动方式,使本实施例能够适应不同的工作环境,同时也能够提高本实施例的行走和越障能力。
30.本实施例中所述传动模块214包括驱动桥215,所述驱动桥215安装在所述骨架1底部,所述驱动桥215设有沿其长度方向贯穿的穿孔,所述驱动桥215内设有传动轴,所述驱动模块22的输出端与所述传动轴传动连接,所述传动轴的端部与所述行走轮21相连接,所述驱动桥215的两端均设有悬架26,所述悬架26包括上支架262、连接板263和弓子板261,所述弓子板261两端均安装有连接板263,所述连接板263两端分别与所述上支架262和弓子板261连接,所述连接板263的两端均设有安装孔,所述连接板263通过所述螺栓和螺母与所述上支架262和所述弓子板261连接,所述上支架262与所述骨架1相连接,所述弓子板261中间上表面设有用于安放所述驱动桥215的安装座264,所述安装座264设有与所述驱动桥215相匹配的u型槽,所述弓子板261中间下表面设有固定板265,所述固定板265上安装有u型螺栓266,所述弓子板261和所述驱动桥215通过所述u型螺栓266和螺母实现固定连接。
31.所述传动模块214与所述行走轮21的连接处设有转向节213,所述骨架1上设有转向模块,所述转向模块包括转向电机231、转向拉杆232、转向连杆235、第一转向臂233和第
二转向臂234,所述转向电机231安装在所述骨架1上,所述第一转向臂233和第二转向臂234分别与所述传动模块214两端的转向节213相连接,其中所述第一转向臂233呈y字型,所述第一转向臂233设有第一连接端、第二连接端和第三连接端,所述第一转向臂233的第三连接端与所述转向节213相连接,所述转向拉杆232的两端分别连接所述转向电机231和所述第一转向臂233的第一连接端,所述转向连杆235的两端分别连接所述第一转向臂233的第二连接端和所述第二转向臂234,所述转向节213上设有转角传感模块25,所述转角传感模块25包括转角编码器251和编码器支架252,所述编码器支架252通过连接螺栓固定在所述驱动桥215与所述转向节213的连接处,所述转角编码器251安装在所述编码器支架252上,当本实施例需要转向时,所述骨架1前后两侧的转向电机231开始工作,所述转向电机231控制所述转向拉杆232带动所述第一转向臂233转动,所述第一转向臂233转动的同时,所述转向连接带动所述第二转向臂234转动,所述转向节213带动所述行走轮21转动,实现转向,当所需转向角度和所述转角编码器251的数值相匹配时,停止转动。
32.本实施例中所述驱动桥215上设有轮速传感器27,所述传动模块214内设有传动齿轮,所述轮速传感器27包括轮速编码器275和外齿轮273,所述外齿轮273与所述传动齿轮271之间设有中间齿轮272,所述中间齿轮272分别与所述外齿轮273和所述传动齿轮271传动连接,所述外齿轮273中间设有外齿轮轴274,所述轮速编码器275设有安装轴277,所述安装轴277与所述外齿轮轴274固定连接,所述安装轴277上设有编码器固定座276,所述轮速编码器275通过所述螺栓固定在所述编码器固定座276上,所述驱动桥215上连接差速器28,所述轮速传感器27用于实时对所述行走轮21的轮速进行监控,所述差速器28用于确保所述传动模块214两侧的行走轮21轮速保持匹配,所述行走轮21包括轮胎211,所述轮胎211内侧设有用于制动的鼓刹212,所述转向节213位于所述鼓刹212和传动模块214之间,所述骨架1上设有制动电机24,所述制动电机24控制所述鼓刹212实现对轮胎211的制动。
33.本实施例中所述骨架1通过所述轮速传感器27和转角传感模块25可以更加准确的获取所述行走轮21的轮速和转角信息,可以更好的将理论路径和实际路径进行匹配,使本实施例的实际行径路线尽可能与所述主控板313的规划路线相重合。
34.本实施例中所述导航模块4包括实时定位仪41和监测模块,本实施例中所述实时定位仪41为rtk(real-time kinematic),所述骨架1前后两端均设有定位柱42,所述rtk安装在所述定位柱42的上端,本实施例采用双rtk进行定位导航,可以大幅提高本实施例的导航精度,所述监测模块包括超声波装置和视觉模块,所述超声波装置包括超声波发射器43和用于安装所述超声波发射器43的超声波支架44,所述超声波支架44安装在所述骨架1上,所述超声波装置能够实时获取所述骨架1四周的环境信息,防止所述骨架1与周围环境发生碰撞,所述视觉模块包括相机45和用于安装所述相机45的相机支架46,所述相机支架46安装在所述骨架1上,所述视觉模块用于检测所述骨架1前方的障碍物信息,能够通过障碍物的形状自动生成虚拟中心线,以便所述主控板进行线路规划。
35.所述骨架1中间部位设有电力仓31,所述电力仓31设有两个容置腔,所述两个容置腔内分别设有增程器32和电池包312,所述增程器32和所述电池包312均通过固定螺栓固定在所述容置腔内,本实施例通过所述增程器32和所述电池包312同时为本实施例提供动力,当本实施例电池包312的电量大于30%时,所述增程器32不工作,仅通过所述电池包312为本实施例提供电力,当所述电池包312的电量小于30%时,所述增程器32启动,所述增程器
32为本实施例供电的同时,其多余的电量供给所述电池包312充电,当所述电池包312的电量达到80%时,所述增程器32停止工作,由所述电池包312进行供电,本实施例采用增程器32和电池包312交替供电的方式,能够大幅度提高本实施例的续航能力,提高本实施例的工作时间,减少充电次数,提高工作效率。
36.为了保护所述骨架1,本实施例中所述骨架1前后两端均设有防撞板47,所述防撞板47包括第一防撞条471,所述第一防撞条471与所述骨架1的端部相连接,所述第一防撞条471与所述骨架1支架设有起缓冲作用的第一气簧473,所述第一防撞条471两端均设有第二防撞条472,所述第一防撞条471与所述第二防撞条472之间设有用于连接的合页475,所述第二防撞条472与所述骨架1之间设有其缓冲作用的第二气簧474,所述第二防撞条472呈圆弧状,当所述防撞板47与所述障碍物相互碰撞时,所述第一气簧473和第二气簧474能够起到缓冲作用,减小所述骨架1受到的冲击,降低所述骨架1受损的可能性,本实施例的整体适配性较高,可以应用于多场景作业中。
37.本实施例中采用超声波装置和视觉模块对所述骨架1四周环境进行检测,及时获取障碍物的信息,且具有较广的覆盖范围,降低本实施例与周围环境发生碰撞的可能性,另外通过在所述骨架1前后设置防撞板47来降低骨架1碰撞时受到撞损度,使本实施例具有更高的安全性。
38.所述电控模块3,包括主控板313,所述主控板313安装在所述电池包312上侧,所述主控板313上集成有行走控制器3131、转向控制器3132、刹车控制器3133、电压转换模块3134和惯性测量模块3135,其中所述行走控制器3131用于控制所述驱动模块22的启停,所述转向控制器3132用于控制所述转向电机231的启停,所述刹车控制器3133用于控制所述制动电机24的启停,所述电压转换模块3134用于控制所述增程器32和所述电池包312的启停,本实施例中所述惯性测量模块3135为imu(inertial measurement unit),所述imu用于测量本实施例的角速率和加速度。
39.本实施例所具备的功能如下:
40.直线行走:所述转向控制器3132控制所述转向电机231启动,所述转向编码器获取所述转向节213的角度,所述转向电机231使所述骨架1前后的转向连杆235居中,所述行走轮21保持平行超的状态,所述rtk获取所述骨架1的位置信息,所述行走控制器3131用于控制所述驱动模块22启动,所述驱动模块22带动本实施例进行行走,在行走过程中所述imu、轮速传感器27和转角传感模块25实时监测本实施例的行走状态并进行微调,确保本实施例保持直线行走;
41.转弯行走:当本实施例需要转弯时,所述转向控制器3132控制所述转向电机231启动,所述转向电机231控制所述转向拉杆232带动所述第一转向臂233转动,所述第一转向臂233转动的同时,所述转向连接带动所述第二转向臂234转动,所述转向节213带动所述行走轮21转动,实现转向,当所需转向角度和所述转角编码器251的数值相匹配时,停止转动,同时所述驱动模块22启动,使所述行走轮21带动所述骨架1行走,在行走过程中所述imu、轮速传感器27和转角传感模块25实时监测本实施例的行走状态并进行微调,确保本实施例其转弯的实际轨迹与规划轨迹重合;
42.行走模式切换:当本实施例在平整的路面上行驶时,可以仅启动所述骨架1前侧的驱动模块22,或者仅启动所述骨架1后侧的驱动模块22,另一个驱动模块22不工作,其与所
对应的驱动桥215上的差速器28挂空挡,以前驱模式或后驱模式行进;当本实施例在不平整的路面行走或者需要进行越障的时候,本实施可以同时启动所述骨架1前后两侧的驱动模块22,以双驱模式行进;
43.短距离横向移动:本实施例在行走过程中,当发现距离下一个目标作业点的位置存在偏差,且通过单个驱动桥215的转向不能实现在下一个工作点的横向位移量时,所述转向控制器3132同时控制所述骨架1前后两侧的转向电机231启动,所述骨架1前后两侧的行走轮21同时进行转向,在此模式下可以在相同的前进位移上获取更大的横向位移,从而解决作业点偏移的问题,另外同时控制两组行走轮进行转向,也能够使本实施例具有更小的转弯半径,方便本实施例在小地头或窄路环境下进行作业,使本实施例能够适应更多的作业环境;
44.动力模式切换:当本实施例电池包312的电量大于30%时,所述增程器32不工作,仅通过所述电池包312为本实施例提供电力,当所述电池包312的电量小于30%时,所述增程器32启动,所述增程器32为本实施例供电的同时,其多余的电量供给所述电池包312充电,当所述电池包312的电量达到80%时,所述增程器32停止工作,由所述电池包312进行供电;
45.自主导航避障模式:本实施例通过所述骨架1上的双rtk获取当前位置信息,所述监测模块获取本实施例前方障碍物信息和四周环境信息,所述监测模块将获取的信息反馈给所述主控板313,所述主控板313根据信息规划所述骨架1的行动路线,为所述骨架1运动提供安全保障,所述超声波装置能在所述骨架1行走过程中,对本实施例四周的环境信息进行实时监控,当四周障碍物与所述骨架1之间的间距小于安全距离时,所述超声波装置发出报警,若所述超声波装置存在漏检或发生紧急情况时,所述防撞板47可以起到缓冲的作用,降低所述骨架1受损度,若触发防撞板47,所述刹车控制器3133控制所述制动电机24的启动,所述制动电机24实现本实施例的紧急停车。
46.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于附图和上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1