一种基于Uu+PC5模式的V2X智能网联后视镜系统的制作方法
一种基于uu+pc5模式的v2x智能网联后视镜系统
技术领域
1.本发明涉及智慧车辆领域,具体是一种基于uu+pc5模式的v2x智能网联后视镜系统。
背景技术:
2.车联网通俗来说是当前“互联网”大背景下的“互联网+汽车”的关键产业,同时也是物联网技术在智慧交通领域的典型应用。
3.传统的v2x模式包括v2v、v2p、v2i,而这些模式均有痛点,即为所有v2x包含的用户,均作为一个终端使用,当包含的用户未与互联网接通时,则刨除在外,而该部分人员、车辆,进而使得传统的v2x系统出现遗漏;
4.因此传统v2x智能网联后视镜系统在对环境模拟时,容易遗漏未与互联网接通用户,进而造成模拟遗漏的情况。
技术实现要素:
5.发明目的:提供一种基于uu+pc5模式的v2x智能网联后视镜系统,以解决现有技术存在的上述问题。
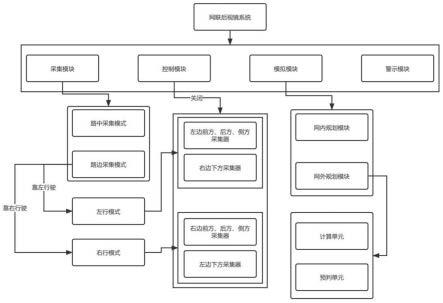
6.技术方案:一种基于uu+pc5模式的v2x智能网联后视镜系统,包括:
7.采集模块,预先安装在后视镜上的采集器,所述采集器至少为四组,分别为在后视镜前方、后方、侧方及下方;
8.控制模块,控制采集器的启停,切换采集模式;
9.模拟模块,根据采集器采集到的信息及网联信息进行模拟车辆周边驾驶状态;
10.警示模块,根据模拟模块模拟的车联周边驾驶状态进行予以警示;
11.通过设计采集模块进行采集网外用户,并通过控制模块进行控制采集模块的采集模式,将网外用户与网内用户进行合并模拟,进而模拟出与驾驶者存在的碰撞风险,并将该风险给予驾驶者警示,降低了驾驶者在行驶过程中出现的事故概率。
12.在进一步实施例中,所述采集器为视觉传感器,用于对周边环境进行采集,并将采集到的图像数据发送至模拟模块内;
13.所述视觉传感器均安装在后视镜内;
14.所述后视镜的前方、后方、侧方及下方开有通孔;
15.所述通孔与采集器的镜头适配。
16.通过在后视镜上开设通孔,进行给予视觉传感器的采集空间,同时将视觉传感器安装在后视镜内,避免视觉传感器裸露在外,避免其出现碰撞损坏。
17.在进一步实施例中,所述采集模式包括路边采集模式及路中采集模式;
18.所述路边采集模式包括靠左模式和靠右模式;
19.当车辆在道路的左边行驶时,启用左行模式;
20.当车辆在道路的右边行驶时,启用左行模式;
21.通过设计路边采集模式及路中采集模式进行切换采集模式,进而使得采集过程中的损耗更小,根据不同行驶状态,采用不同的采集模式。
22.在进一步实施例中,当采用左行模式时,由控制模块关闭车辆左边后视镜上的前方、后方、侧方采集器,下方采集器继续工作,同时关闭车辆右边后视镜上的下方采集器;
23.当车辆靠左行驶时,采用左行模式,由于车辆靠左,贴近左边车道防护栏或者路边,此时仅需开启左边的下方采集器进行采集防护栏或者路边环境即可,而右边采集器继续采集前后侧下方位的环境。
24.当采用右行模式时,由控制模块关闭车辆右边后视镜上的前方、后方、侧方采集器,下方采集器继续工作,同时关闭车辆左边后视镜上的下方采集器;
25.当车辆靠右行驶时,采用右行模式,由于车辆靠右,贴紧右边车道防护栏或者路边,此时仅需开启右边的下方采集器进行采集防护栏或者路边环境即可,而左边采集器继续采集前后侧下方位的环境。
26.当采用路中采集模式时,由控制模块关闭车辆两边后视镜上的下方采集器。
27.当车辆没有贴紧左右两边道路时,采用路中采集模式,此时可以关闭左右两边的下方采集器,因此车辆在路中行驶时,无需采集路边的防护栏等信息。
28.在进一步实施例中,所述模拟模块包括网外规划模块和网内规划模块;
29.所述网外规划模块,用于规划未联网并被采集模块采集到的网外用户的行程轨迹;
30.所述网内规划模块用于规划联网的各个网内用户的行程轨迹;
31.所述网外规划模块包括计算单元和预判单元。
32.在进一步实施例中,所述计算单元根据采集模块采集到的网外用户运动信息进行分析、计算往外用户移动速度;
33.设定采集模块首次采集到的网外用户的时间为t1,位置为p1,将p1作为坐标系原点,进行建立坐标,以采集到的网外用户转向时,作为截取时间;
34.截取采集模块在t2时刻,采集到的网外用户的位置为p2(x2,y2);
35.截取采集模块在t3时刻,采集到的网外用户的位置为p3(x3,y3);
36.截取采集模块在tn时刻,采集到的网外用户的位置为pn(xn,yn);
37.由于往外用户位置已知,各个时间段已知,在此计算各个时间段内网外用户的平均速度,将各个时间段内速度相加,计算出模拟速度;
38.t1至t2时间段内网外用户的平均速度为:
[0039][0040]
t2至t3时间段内网外用户的平均速度为:
[0041][0042]
t
n-1
至tn时间段内网外用户的平均速度为:
[0043][0044]
设模拟速度为v;
[0045][0046]
通过设计计算单元进行计算各个网外用户的运动速度。
[0047]
在进一步实施例中,所述预判单元用于预判网外用户的运动方向;
[0048]
当网外用户在某段道路靠边降速或者停止时的位置出现分叉口时,判定该网外用户需要转向;
[0049]
当转向路口无交通指示灯时,则通过网外用户在该道路靠边方向模拟网外用户即将转向的方向;
[0050]
当转向路口存在交通指示灯时,则通过交通指示灯模拟网外用户即将转向的方向。
[0051]
通过设计预判单元进行预判网外用户的运动方向。
[0052]
在进一步实施例中,当网外规划模块和网内规划模块规划网外用户及网内用户规划行程与自身出现交叉时,判定具有碰撞风险,并将该风险传输至警示模块;
[0053]
通过计算单元和预判单元进行模拟网外用户的行程轨迹,并结合网内用户的形成轨迹形成模拟行程,当模拟行程与驾驶者的行程出现交叉时,则判定具有碰撞风险。
[0054]
在进一步实施例中,所述警示模块根据传输至的碰撞风险,进行给予驾驶者警示。
[0055]
有益效果:本发明公开了一种基于uu+pc5模式的v2x智能网联后视镜系统,本发明通过设计采集模块进行采集网外用户,并通过控制模块进行控制采集模块的采集模式,将网外用户与网内用户进行合并模拟,进而模拟出与驾驶者存在的碰撞风险,并将该风险给予驾驶者警示,降低了驾驶者在行驶过程中出现的事故概率。
附图说明
[0056]
图1是本发明的uu+pc5模式互联示意图。
[0057]
图2是发明系统模块示意图。
[0058]
图3是发明的采集模块采集视角示意图。
[0059]
图4是发明的计算单元截取位置及时间节点示意图。
[0060]
图5是发明的计算单元模拟速度示意图。
[0061]
图6是发明的预判单元预判示意图。
具体实施方式
[0062]
经过申请人的研究分析,出现这一问题(传统v2x后视镜系统模拟行程容易遗漏的)的原因在于,传统的v2x模式包括v2v、v2p、v2i,而这些模式均有痛点,即为所有v2x包含的用户,均作为一个终端使用,当包含的用户未与互联网接通时,则刨除在外,而该部分人员、车辆,进而使得传统的v2x系统出现遗漏;
[0063]
因此传统v2x智能网联后视镜系统在对环境模拟时,容易遗漏未与互联网接通用户,进而造成模拟遗漏的情况;
[0064]
本发明通过设计采集模块进行采集网外用户,并通过控制模块进行控制采集模块的采集模式,将网外用户与网内用户进行合并模拟,进而模拟出与驾驶者存在的碰撞风险,并将该风险给予驾驶者警示,降低了驾驶者在行驶过程中出现的事故概率。
[0065]
一种基于uu+pc5模式的v2x智能网联后视镜系统,包括:
[0066]
采集模块,预先安装在后视镜上的采集器,所述采集器至少为四组,分别为在后视镜前方、后方、侧方及下方;
[0067]
控制模块,控制采集器的启停,切换采集模式;
[0068]
模拟模块,根据采集器采集到的信息及网联信息进行模拟车辆周边驾驶状态;
[0069]
警示模块,根据模拟模块模拟的车联周边驾驶状态进行予以警示;
[0070]
通过设计采集模块进行采集网外用户,并通过控制模块进行控制采集模块的采集模式,将网外用户与网内用户进行合并模拟,进而模拟出与驾驶者存在的碰撞风险,并将该风险给予驾驶者警示,降低了驾驶者在行驶过程中出现的事故概率。
[0071]
所述采集器为视觉传感器,用于对周边环境进行采集,并将采集到的图像数据发送至模拟模块内;
[0072]
所述视觉传感器均安装在后视镜内;
[0073]
所述后视镜的前方、后方、侧方及下方开有通孔;
[0074]
所述通孔与采集器的镜头适配。
[0075]
通过在后视镜上开设通孔,进行给予视觉传感器的采集空间,同时将视觉传感器安装在后视镜内,避免视觉传感器裸露在外,避免其出现碰撞损坏。
[0076]
所述采集模式包括路边采集模式及路中采集模式;
[0077]
所述路边采集模式包括靠左模式和靠右模式;
[0078]
当车辆在道路的左边行驶时,启用左行模式;
[0079]
当车辆在道路的右边行驶时,启用左行模式;
[0080]
通过设计路边采集模式及路中采集模式进行切换采集模式,进而使得采集过程中的损耗更小,根据不同行驶状态,采用不同的采集模式。
[0081]
当采用左行模式时,由控制模块关闭车辆左边后视镜上的前方、后方、侧方采集器,下方采集器继续工作,同时关闭车辆右边后视镜上的下方采集器;
[0082]
当车辆靠左行驶时,采用左行模式,由于车辆靠左,贴近左边车道防护栏或者路边,此时仅需开启左边的下方采集器进行采集防护栏或者路边环境即可,而右边采集器继续采集前后侧下方位的环境。
[0083]
当采用右行模式时,由控制模块关闭车辆右边后视镜上的前方、后方、侧方采集器,下方采集器继续工作,同时关闭车辆左边后视镜上的下方采集器;
[0084]
当车辆靠右行驶时,采用右行模式,由于车辆靠右,贴紧右边车道防护栏或者路边,此时仅需开启右边的下方采集器进行采集防护栏或者路边环境即可,而左边采集器继续采集前后侧下方位的环境。
[0085]
当采用路中采集模式时,由控制模块关闭车辆两边后视镜上的下方采集器。
[0086]
当车辆没有贴紧左右两边道路时,采用路中采集模式,此时可以关闭左右两边的下方采集器,因此车辆在路中行驶时,无需采集路边的防护栏等信息。
[0087]
所述模拟模块包括网外规划模块和网内规划模块;
[0088]
所述网外规划模块,用于规划未联网并被采集模块采集到的网外用户的行程轨迹;
[0089]
所述网内规划模块用于规划联网的各个网内用户的行程轨迹;
[0090]
所述网外规划模块包括计算单元和预判单元。
[0091]
所述计算单元根据采集模块采集到的网外用户运动信息进行分析、计算往外用户移动速度;
[0092]
设定采集模块首次采集到的网外用户的时间为t1,位置为p1,将p1作为坐标系原点,进行建立坐标,以采集到的网外用户转向时,作为截取时间;
[0093]
截取采集模块在t2时刻,采集到的网外用户的位置为p2(x2,y2);
[0094]
截取采集模块在t3时刻,采集到的网外用户的位置为p3(x3,y3);
[0095]
截取采集模块在tn时刻,采集到的网外用户的位置为pn(xn,yn);
[0096]
由于往外用户位置已知,各个时间段已知,在此计算各个时间段内网外用户的平均速度,将各个时间段内速度相加,计算出模拟速度;
[0097]
t1至t2时间段内网外用户的平均速度为:
[0098][0099]
t2至t3时间段内网外用户的平均速度为:
[0100][0101]
t
n-1
至tn时间段内网外用户的平均速度为:
[0102][0103]
设模拟速度为v;
[0104][0105]
通过设计计算单元进行计算各个网外用户的运动速度。
[0106]
所述预判单元用于预判网外用户的运动方向;
[0107]
当网外用户在某段道路靠边降速或者停止时的位置出现分叉口时,判定该网外用户需要转向;
[0108]
当转向路口无交通指示灯时,则通过网外用户在该道路靠边方向模拟网外用户即将转向的方向;
[0109]
当转向路口存在交通指示灯时,则通过交通指示灯模拟网外用户即将转向的方向。
[0110]
某段道路包括人行道及机动车道。
[0111]
通过设计预判单元进行预判网外用户的运动方向。
[0112]
当网外规划模块和网内规划模块规划网外用户及网内用户规划行程与自身出现交叉时,判定具有碰撞风险,并将该风险传输至警示模块;
[0113]
通过计算单元和预判单元进行模拟网外用户的行程轨迹,并结合网内用户的形成
轨迹形成模拟行程,当模拟行程与驾驶者的行程出现交叉时,则判定具有碰撞风险。
[0114]
所述警示模块根据传输至的碰撞风险,进行给予驾驶者警示。
[0115]
工作原理说明:首先由驾驶者根据车辆行驶状态进行通过控制模块切换采集模式,
[0116]
当车辆在道路的左边行驶时,启用左行模式;当车辆在道路的右边行驶时,启用左行模式;当车辆不适用左行模式和右行模式时,启用路中采集模式;
[0117]
通过不同的采集模式,进行采集车辆周边环境信息,并根据采集到的信息及网联信息进行模拟行程轨迹;
[0118]
网外用户由计算单元进行计算各网外用户的运动速度;
[0119]
设定采集模块首次采集到的网外用户的时间为t1,位置为p1,将p1作为坐标系原点,进行建立坐标,以采集到的网外用户转向时,作为截取时间;
[0120]
截取采集模块在t2时刻,采集到的网外用户的位置为p2(x2,y2);
[0121]
截取采集模块在t3时刻,采集到的网外用户的位置为p3(x3,y3);
[0122]
截取采集模块在tn时刻,采集到的网外用户的位置为pn(xn,yn);
[0123]
由于往外用户位置已知,各个时间段已知,在此计算各个时间段内网外用户的平均速度,将各个时间段内速度相加,计算出模拟速度;
[0124]
再由预判单元进行预判网外用户的转向;
[0125]
当网外用户在某段道路靠边降速或者停止时的位置出现分叉口时,判定该网外用户需要转向;
[0126]
当转向路口无交通指示灯时,则通过网外用户在该道路靠边方向模拟网外用户即将转向的方向;
[0127]
当转向路口存在交通指示灯时,则通过交通指示灯模拟网外用户即将转向的方向;
[0128]
当网外规划模块和网内规划模块规划网外用户及网内用户规划行程与自身出现交叉时,判定具有碰撞风险,并将该风险传输至警示模块。
[0129]
警示模块根据传输至的碰撞风险,进行给予驾驶者警示。
[0130]
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1